JP7003612B2 - 異常検知装置、及び異常検知プログラム - Google Patents
異常検知装置、及び異常検知プログラム Download PDFInfo
- Publication number
- JP7003612B2 JP7003612B2 JP2017236224A JP2017236224A JP7003612B2 JP 7003612 B2 JP7003612 B2 JP 7003612B2 JP 2017236224 A JP2017236224 A JP 2017236224A JP 2017236224 A JP2017236224 A JP 2017236224A JP 7003612 B2 JP7003612 B2 JP 7003612B2
- Authority
- JP
- Japan
- Prior art keywords
- posture
- region
- head
- driver
- sign
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 51
- 230000036544 posture Effects 0.000 claims description 160
- 208000028752 abnormal posture Diseases 0.000 claims description 90
- 230000005856 abnormality Effects 0.000 claims description 59
- 239000000872 buffer Substances 0.000 claims description 54
- 238000000034 method Methods 0.000 claims description 51
- 230000008569 process Effects 0.000 claims description 49
- 230000007717 exclusion Effects 0.000 claims description 39
- 239000002243 precursor Substances 0.000 claims description 25
- 238000003384 imaging method Methods 0.000 claims description 16
- 238000012545 processing Methods 0.000 claims description 11
- 230000014759 maintenance of location Effects 0.000 claims description 10
- 230000033228 biological regulation Effects 0.000 claims description 4
- 210000003128 head Anatomy 0.000 description 75
- 230000007704 transition Effects 0.000 description 37
- 238000010191 image analysis Methods 0.000 description 11
- 238000012544 monitoring process Methods 0.000 description 9
- 230000004048 modification Effects 0.000 description 8
- 238000012986 modification Methods 0.000 description 8
- 230000006870 function Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 241000282414 Homo sapiens Species 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000000638 solvent extraction Methods 0.000 description 1
Images

























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K28/00—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions
- B60K28/02—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the driver
- B60K28/06—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the driver responsive to incapacity of driver
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/25—Determination of region of interest [ROI] or a volume of interest [VOI]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/161—Detection; Localisation; Normalisation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/0818—Inactivity or incapacity of driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/223—Posture, e.g. hand, foot, or seat position, turned or inclined
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Description
図11及び図12に示すユースケース1は、運転者の姿勢が正常な状態に維持された場合である。この場合、例えば手で顔を覆う等の能動的な行為又はノイズ等の発生により、判定用バッファ76には、「予兆領域外」の判断結果だけでなく、「検出不可」の判断結果も格納される。しかし、ユースケース1では、運転者の正常姿勢が維持されているため、「予兆領域内」を示す判断結果の割合は、判定用バッファ76の総数の所定割合P1を超えない。故に、姿勢判定部74は、運転者の状態を「正常姿勢」であると判定し続ける。
図13及び図14に示すユースケース2は、一時的に突っ伏し状態となり、その後、通常姿勢に復帰した場合である。通常姿勢は、運転に望ましい正常姿勢に加えて、僅かに大勢を変化させた状態も含んでいる。この場合、運転者が突っ伏し状態へ遷移したことにより、判定用バッファ76には、「予兆領域内」の判断結果が格納される。しかし、「予兆領域内」を示す判断結果の割合が所定割合P1を超える前に、運転者は、突っ伏し状態から復帰している。故に、判定用バッファ76には、「予兆領域外」の判断結果が再び格納される。その結果、姿勢判定部74は、運転者の状態を「予兆状態」に遷移させることなく、「正常姿勢」であると判定し続ける。
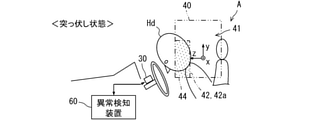
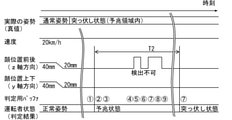
図15及び図16に示すユースケース3は、ユースケース2よりも長い一定時間だけ突っ伏し状態(図3参照)となり、そのあと通常姿勢に復帰した場合である。具体例としては、運転者がくしゃみ等をした場合である。この場合、運転者が突っ伏し状態へ遷移したことにより、判定用バッファ76には、「予兆領域内」の判断結果が格納される。突っ伏し状態の継続により、判定用バッファ76に占める「予兆領域内」の判断結果の割合が所定割合P1を超えたタイミング(時刻2)で、姿勢判定部74は、運転者の状態を「正常姿勢」から「予兆状態」に遷移させる。
図17及び図18に示すユースケース4は、右折等の実施に際して、突っ伏し状態に近い右折姿勢を運転者がとった場合である。この場合、例えば右折のための一時的な減速により、走行状態判定部72にて除外条件が成立する。仮に、右折姿勢をとった運転者の頭部Hdが予兆領域42aにあったとしても、姿勢判定部74は、「予兆領域内」とは判断せず、「除外条件中」と判断する。こうして判定用バッファ76には、「除外条件中」の判断結果が連続的に格納される。その結果、「予兆領域内」を示す判断結果の割合が所定割合P1を超えないため、姿勢判定部74は、右折姿勢を突っ伏し状態と誤認することなく、運転者の状態を「正常姿勢」であると判定し続ける。
図19及び図20に示すユースケース5は、ユースケース4と同様に、右折のシーンを想定したユースケースであり、突っ伏し状態に近い右折姿勢を運転者がとった場合である。但し、ユースケース5の運転者は、除外条件の成立していない走行状態で右折姿勢をとっている。故に、判定用バッファ76には「予兆領域内」の判断結果が格納されるようになる。そのため、右折姿勢の継続により、判定用バッファ76に占める「予兆領域内」の判断結果の割合が所定割合P1を超えたタイミング(時刻2)で、姿勢判定部74は、運転者の状態を「正常姿勢」から「予兆状態」に遷移させる。
図21及び図22に示すユースケース6の運転者は、突っ伏し状態(図3参照)となった後、さらに撮影領域40外に倒れ込んでいる。この場合、運転者の突っ伏し状態への遷移により、判定用バッファ76には、「予兆領域内」の判断結果が格納される。そして、判定用バッファ76に占める「予兆領域内」の判断結果の割合が所定割合P1を超えたタイミング(時刻2)で、姿勢判定部74は、運転者の状態を「正常姿勢」から「予兆状態」に遷移させる。
図23及び図24に示すユースケース7は、運転者の姿勢が突っ伏し状態のまま固着した場合である。この場合でも、判定用バッファ76に占める「予兆領域内」の判断結果の割合が所定割合P1を超えたタイミング(時刻2)で、姿勢判定部74は、運転者の状態を「正常姿勢」から「予兆状態」に遷移させる。
図25及び図26に示すユースケース8の運転者は、ユースケース6と同様に、突っ伏し状態(図3参照)となった後に、さらに撮影領域40の領域外に倒れ込んでいる。ユースケース8の運転者は、撮影領域40からフレームアウトしたまま、復帰しない。この場合でも、ユースケース7と同様に、判定用バッファ76に占める「予兆領域内」の判断結果の割合が所定割合P1を超えたタイミング(時刻2参照)で、姿勢判定部74は、運転者の状態を「正常姿勢」から「予兆状態」に遷移させる。
以上、本開示による一実施形態について説明したが、本開示は、上記実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
Claims (9)
- 運転者の頭部(Hd)を写すように撮影領域(40)が規定された撮像部(32)を有する車両(A)において、前記撮像部にて撮像された画像(Pi)の情報に基づき、前記運転者の異常姿勢を検知する異常検知装置であって、
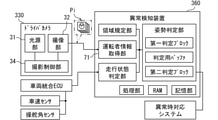
前記撮影領域のうちで、前記運転者の姿勢崩れにより、正常姿勢から前記異常姿勢に遷移する過程で前記頭部が位置すると想定される範囲に、少なくとも一つの予兆領域(42)を規定する領域規定部(73)と、
前記予兆領域に前記頭部があるか否かを判断し、前記予兆領域に前記頭部が逗留した場合に、前記運転者が前記異常姿勢の状態にあると判定する姿勢判定部(74)と、
を備える異常検知装置。 - 前記姿勢判定部は、前記予兆領域への前記頭部の逗留後、前記撮影領域のうちで前記予兆領域を除く特定領域(41)に前記頭部が復帰しない場合に、前記運転者が前記異常姿勢の状態にあると判定する請求項1に記載の異常検知装置。
- 前記姿勢判定部は、前記頭部の位置及び姿勢角の両方に基づき、前記予兆領域への前記頭部の逗留を判定する請求項1又は2に記載の異常検知装置。
- 前記領域規定部は、前記撮影領域の境界(44)を含み且つ当該境界から所定の幅を有する範囲に前記予兆領域を規定する請求項1~3のいずれか一項に記載の異常検知装置。
- 前記撮影領域は、前記頭部を含むように規定された三次元の空間であり、
前記領域規定部は、前記撮影領域の中に三次元の前記予兆領域を規定する請求項1~4のいずれか一項に記載の異常検知装置。 - 前記領域規定部は、複数種類の前記異常姿勢に対応する複数の前記予兆領域を個別に規定し、
前記姿勢判定部は、複数の前記予兆領域のうちの一つに前記頭部が逗留した場合に、前記頭部の逗留があった前記予兆領域に対応する種類の前記異常姿勢であると判定する請求項1~5のいずれか一項に記載の異常検知装置。 - 前記車両の走行状態が予め規定された除外条件に該当しているか否かを判定する走行状態判定部(72)、をさらに備え、
前記姿勢判定部は、前記走行状態判定部にて前記除外条件が成立している場合に、前記予兆領域に前記頭部があると判断しない請求項1~6のいずれか一項に記載の異常検知装置。 - 前記予兆領域に前記頭部があるか否かの判断結果を時系列に沿って所定数記憶するバッファ部(76)、をさらに備え、
前記姿勢判定部は、前記予兆領域に前記頭部があることを示す前記判断結果の数が前記バッファ部に記憶された前記判断結果の総数の所定割合(P1)を超えた場合に、前記予兆領域に前記頭部が逗留したと判定する請求項1~7のいずれか一項に記載の異常検知装置。 - 運転者の頭部(Hd)を写すように撮影領域(40)が規定された撮像部(32)を有する車両(A)において、前記撮像部にて撮像された画像(Pi)の情報に基づき、前記運転者の異常姿勢を検知する異常検知プログラムであって、
少なくとも一つの処理部(61)を、
前記撮影領域のうちで、前記運転者の姿勢崩れにより、正常姿勢から前記異常姿勢に遷移する過程で前記頭部が位置すると想定される範囲に、少なくとも一つの予兆領域(42)を規定する領域規定部(73)と、
前記予兆領域に前記頭部があるか否かを判断し、前記予兆領域に前記頭部が逗留した場合に、前記運転者が前記異常姿勢の状態にあると判定する姿勢判定部(74)として機能させる異常検知プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017236224A JP7003612B2 (ja) | 2017-12-08 | 2017-12-08 | 異常検知装置、及び異常検知プログラム |
| PCT/JP2018/042780 WO2019111696A1 (ja) | 2017-12-08 | 2018-11-20 | 異常検知装置、及び異常検知プログラム |
| US16/891,532 US11615632B2 (en) | 2017-12-08 | 2020-06-03 | Abnormality detection device and abnormality detection program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017236224A JP7003612B2 (ja) | 2017-12-08 | 2017-12-08 | 異常検知装置、及び異常検知プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019105872A JP2019105872A (ja) | 2019-06-27 |
| JP2019105872A5 JP2019105872A5 (ja) | 2020-03-05 |
| JP7003612B2 true JP7003612B2 (ja) | 2022-01-20 |
Family
ID=66750922
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017236224A Active JP7003612B2 (ja) | 2017-12-08 | 2017-12-08 | 異常検知装置、及び異常検知プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11615632B2 (ja) |
| JP (1) | JP7003612B2 (ja) |
| WO (1) | WO2019111696A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6848912B2 (ja) | 2018-03-23 | 2021-03-24 | 株式会社デンソー | 状態判定装置、状態判定プログラム及びコンピュータ読み出し可能持続的有形記録媒体 |
| US11417122B2 (en) * | 2018-11-21 | 2022-08-16 | Lg Electronics Inc. | Method for monitoring an occupant and a device therefor |
| US11823468B2 (en) * | 2019-11-19 | 2023-11-21 | Hyundai Mobis Co., Ltd. | Driver state warning system and method of monitoring driver state |
| JP7314085B2 (ja) * | 2020-03-18 | 2023-07-25 | 株式会社東海理化電機製作所 | 画像処理装置、コンピュータプログラム、および異常推定システム |
| JP7458216B2 (ja) * | 2020-03-18 | 2024-03-29 | 株式会社東海理化電機製作所 | 画像処理装置、コンピュータプログラム、および異常推定システム |
| JP7314084B2 (ja) * | 2020-03-18 | 2023-07-25 | 株式会社東海理化電機製作所 | 画像処理装置、コンピュータプログラム、および異常推定システム |
| JP7351253B2 (ja) * | 2020-03-31 | 2023-09-27 | いすゞ自動車株式会社 | 許否決定装置 |
| JP2021167163A (ja) * | 2020-04-13 | 2021-10-21 | マツダ株式会社 | ドライバ異常判定装置 |
| JP7415307B2 (ja) | 2020-07-01 | 2024-01-17 | マツダ株式会社 | 運転者状態推定システム |
| JP2022038604A (ja) | 2020-08-27 | 2022-03-10 | 株式会社Subaru | 車両の制御装置 |
| US11610336B2 (en) * | 2021-02-01 | 2023-03-21 | GM Global Technology Operations LLC | Methods and systems to detect vehicle events using vehicle cameras |
| CN113335296B (zh) * | 2021-06-24 | 2022-11-29 | 东风汽车集团股份有限公司 | 一种分心驾驶自适应检测系统及方法 |
| WO2023243066A1 (ja) * | 2022-06-17 | 2023-12-21 | 三菱電機株式会社 | 異常姿勢判定装置、異常姿勢判定方法、および、車両制御システム |
| WO2024069785A1 (ja) * | 2022-09-28 | 2024-04-04 | 三菱電機株式会社 | 乗員状態判定装置、乗員状態判定システム、乗員状態判定方法、プログラム及び車両制御システム |
| CN116597385B (zh) * | 2023-06-02 | 2024-01-23 | 北京安录国际技术有限公司 | 一种异常行为分析方法、系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005108033A (ja) | 2003-09-30 | 2005-04-21 | Toshiba Corp | 運転者状況判定装置および運転者状況判定方法 |
| JP2010044493A (ja) | 2008-08-11 | 2010-02-25 | Denso Corp | 行動推定装置、プログラム |
| JP2016139192A (ja) | 2015-01-26 | 2016-08-04 | 住友電気工業株式会社 | 運転支援装置、コンピュータプログラム及び運転支援方法 |
| JP2017016568A (ja) | 2015-07-06 | 2017-01-19 | 株式会社デンソー | 運転者異常検出装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10960A (ja) | 1996-06-12 | 1998-01-06 | Yazaki Corp | 運転者監視装置 |
| JP3943367B2 (ja) * | 2001-10-31 | 2007-07-11 | 株式会社デンソー | 車両用乗員頭部検出装置 |
| JP6372388B2 (ja) | 2014-06-23 | 2018-08-15 | 株式会社デンソー | ドライバの運転不能状態検出装置 |
| CN105590410A (zh) * | 2014-10-22 | 2016-05-18 | 鸿富锦精密工业(武汉)有限公司 | 安全驾驶监控系统及安全驾驶监控方法 |
| JP2018128974A (ja) * | 2017-02-10 | 2018-08-16 | トヨタ自動車株式会社 | ドライバ状態監視装置 |
-
2017
- 2017-12-08 JP JP2017236224A patent/JP7003612B2/ja active Active
-
2018
- 2018-11-20 WO PCT/JP2018/042780 patent/WO2019111696A1/ja active Application Filing
-
2020
- 2020-06-03 US US16/891,532 patent/US11615632B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005108033A (ja) | 2003-09-30 | 2005-04-21 | Toshiba Corp | 運転者状況判定装置および運転者状況判定方法 |
| JP2010044493A (ja) | 2008-08-11 | 2010-02-25 | Denso Corp | 行動推定装置、プログラム |
| JP2016139192A (ja) | 2015-01-26 | 2016-08-04 | 住友電気工業株式会社 | 運転支援装置、コンピュータプログラム及び運転支援方法 |
| JP2017016568A (ja) | 2015-07-06 | 2017-01-19 | 株式会社デンソー | 運転者異常検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11615632B2 (en) | 2023-03-28 |
| JP2019105872A (ja) | 2019-06-27 |
| US20200293800A1 (en) | 2020-09-17 |
| WO2019111696A1 (ja) | 2019-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7003612B2 (ja) | 異常検知装置、及び異常検知プログラム | |
| US9202106B2 (en) | Eyelid detection device | |
| JP6350145B2 (ja) | 顔向き検出装置及び車両用警告システム | |
| US20150098633A1 (en) | Face detection apparatus, face detection method, and program | |
| US10561356B2 (en) | Driver's physical condition detection device and method | |
| JP2008002838A (ja) | 車両乗員検出システム、作動装置制御システム、車両 | |
| US11455810B2 (en) | Driver attention state estimation | |
| JP2010013090A (ja) | 運転者状態監視システム | |
| JP6739672B2 (ja) | 体格推定装置および体格推定方法 | |
| JP2005247224A (ja) | 車両用表示装置 | |
| JP6187155B2 (ja) | 注視対象物推定装置 | |
| WO2019163124A1 (ja) | 三次元位置推定装置及び三次元位置推定方法 | |
| EP3440592B1 (en) | Method and system of distinguishing between a glance event and an eye closure event | |
| JP2020160914A (ja) | 物体検出装置 | |
| JP2007164517A (ja) | 図形中心検出方法、楕円検出方法、画像認識装置、制御装置 | |
| WO2018167995A1 (ja) | 運転者状態推定装置、及び運転者状態推定方法 | |
| US11161470B2 (en) | Occupant observation device | |
| JP2007022428A (ja) | 車両デバイス制御装置、および車両デバイス制御方法 | |
| JP6649063B2 (ja) | 車両後方表示装置及び表示制御装置 | |
| JP2009287936A (ja) | 運転者眼球位置検出装置 | |
| JP2009176005A (ja) | 顔画像の特徴点検出方法およびその装置 | |
| JP4601376B2 (ja) | 画像異常判定装置 | |
| WO2020179656A1 (ja) | 運転者監視装置 | |
| JP4935387B2 (ja) | 情報表示装置 | |
| JP6359866B2 (ja) | 対象者存在範囲推定装置及び対象者存在範囲推定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200116 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210601 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211130 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211213 |