JP7002007B2 - カメラパラメタセット算出装置、カメラパラメタセット算出方法及びプログラム - Google Patents
カメラパラメタセット算出装置、カメラパラメタセット算出方法及びプログラム Download PDFInfo
- Publication number
- JP7002007B2 JP7002007B2 JP2018079354A JP2018079354A JP7002007B2 JP 7002007 B2 JP7002007 B2 JP 7002007B2 JP 2018079354 A JP2018079354 A JP 2018079354A JP 2018079354 A JP2018079354 A JP 2018079354A JP 7002007 B2 JP7002007 B2 JP 7002007B2
- Authority
- JP
- Japan
- Prior art keywords
- camera
- image
- parameter set
- camera parameter
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/246—Calibration of cameras
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
- G06T7/85—Stereo camera calibration
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two 2D image sensors having a relative position equal to or related to the interocular distance
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/243—Image signal generators using stereoscopic image cameras using three or more 2D image sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/275—Image signal generators from 3D object models, e.g. computer-generated stereoscopic image signals
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
- G06T2207/10012—Stereo images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30204—Marker
- G06T2207/30208—Marker matrix
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30264—Parking
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/12—Acquisition of 3D measurements of objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/698—Control of cameras or camera modules for achieving an enlarged field of view, e.g. panoramic image capture
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Studio Devices (AREA)
- Closed-Circuit Television Systems (AREA)
- Image Analysis (AREA)
Description
本発明者らは、「背景技術」の欄において記載したカメラ校正に関し、以下の問題が生じることを見出した。具体的には、自動車の安全運転支援システム又は不審者等を検出する監視カメラシステムなどにおいて、車両の周り又は監視対象エリアを利用者にわかりやすく見せるために、複数台のカメラで撮影した画像から1つの画像を生成する手法、及びカメラで撮影した画像に位置の基準となるような補助線を重畳する手法が、数多く提案されている。複数台のカメラがそれぞれ異なる位置に設定されている場合に、これらのカメラで撮影した画像から1つの画像を生成するためには、各カメラの位置及び向き、並びに、焦点距離及び光軸中心位置などの各カメラのカメラパラメタセットが必要である。カメラパラメタセットとは、カメラで被写体のある点を撮影して画像を得た場合、当該ある点の3次元座標と、画像における当該点の像の2次元座標(画素座標とも呼ばれる)との関係を表す、カメラのモデルと当該モデルに応じた複数のパラメタである。このカメラパラメタセットを算出することをカメラ校正と呼ぶ。より詳細には、カメラパラメタセットは、外部パラメタセット及び内部パラメタセットの2つのカメラパラメタセットで構成される。外部パラメタセットは、カメラの撮影空間を基準として定められた3次元の世界座標系と、カメラを基準として定められた3次元のカメラ座標系との間での位置関係を表す。内部パラメタセットは、カメラ座標系における被写体の3次元座標と当該カメラで撮影した画像上での当該被写体の位置との関係を表す。
非特許文献1が開示するカメラ校正技術では、基準点の3次元座標及び当該基準点の画素座標の組が複数組用意されて、これらを入力要素とし、カメラパラメタを用いて3次元座標の基準点を画像上に投影した点と、当該基準点に対応する画素座標との距離(再投影誤差)の総和を最小化するカメラパラメタセットが算出される。
[1.車載カメラシステムの構成]
本開示の実施の形態に係るカメラパラメタセット算出装置111を備える車載カメラシステム10を説明する。これに限定するものではないが、本実施の形態では、車載カメラシステム10は、移動体の一例である車両に搭載されるカメラシステムであるとして、説明する。図2を参照すると、実施の形態に係るカメラパラメタセット算出装置111を備える車載カメラシステム10の機能的な構成を示すブロック図が示されている。図2に示されるように、車載カメラシステム10は、撮像部100と、画像処理部110と、ディスプレイ120とを備える。なお、車載カメラシステム10が搭載される対象は、車両、つまり乗り物であってもよい。例えば、上記対象は、自動車、及び、自動車以外の車両であってもよく、船舶又は航空機であってもよい。自動車以外の車両は、トラック、バス、二輪車、搬送車、鉄道、建設機械、荷役機械等であってもよい。また、車載カメラシステム10が搭載される対象は、利用者が遠隔操作する車両またはロボットであってもよい。
車載カメラシステム10の動作を説明する。具体的には、車載カメラシステム10における、画像生成時の動作と、自己校正時の動作とを、順に説明する。
車載カメラシステム10における画像生成時の動作を、図5を用いて説明する。なお、図5は、車載カメラシステム10の画像処理部110における、画像生成時の動作の一例を表すフローチャートである。図5に示されるように、画像生成時の動作は、カメラパラメタセット読み出しのステップS401の処理と、画像生成のステップS402の処理とを含む。図5に示される各動作は、図4のコンピュータ300で実行されてもよい。





上述した車載カメラシステム10は、予め記録しておいたカメラパラメタセットを用いて画像を生成している。一方、カメラを製造した場合及び車両にカメラを設置した場合に、カメラパラメタセットは、組立て誤差に起因する差を設計値に対して有するため、カメラパラメタセットの推定、すなわち、カメラ校正が必要になる。また、組立て時にカメラ校正をした場合であっても、カメラの取り付け位置が、経年変化、外力又は温度変化等の影響を受けた場合に、変形等を生じて変わる場合がある。例えば、経年変化によって、カメラの取り付け位置が変化した場合に、経年変化前のカメラパラメタセットを用いて画像を生成すると、例えば、生成画像中の被写体の位置がずれるなど、生成画像が正しく生成されない。そのため、経年変化等でカメラパラメタが変化する場合にも、カメラの校正が必要になる。



以下、上述したカメラパラメタセット算出装置111の自己校正処理S111が、カメラ101a及び101bのカメラパラメタを正確に算出することが可能であることを、シミュレーションによる実験結果をもとに検証し説明する。
(i)カメラパラメタが正解値である場合に、評価値Jも最小であること
(ii)カメラパラメタの正解値の近傍で、評価関数が下に凸の線形を形成すること
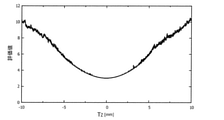
実験条件1では、カメラのカメラパラメタの1つを変更しつつ評価値を算出し、評価値の算出結果と、予め既知であるカメラパラメタの正解値とを比較する実験を行った。各カメラ101a及び101bのカメラパラメタセットのうち、内部パラメタセットは、上記の式4の等距離射影モデルに従って、カメラの光軸中心の画素座標(cu,cv)、カメラの焦点距離f、カメラの撮像素子1画素分のx方向及びy方向それぞれの長さdpx及びdpyの計5個のパラメタを含む。外部パラメタセットMは、上記の式1及び式2と同様の下記の式12のように示される。外部パラメタセットMは、カメラ座標系の世界座標系に対する具体的な変位量として、X、Y及びZの各軸周りの回転量RX、RY及びRZと、X、Y及びZの各軸方向の並進量TX、TY及びTZとの計6個のパラメタを含む。2台のカメラ101a及び101bのカメラパラメタセットには、合計22個のパラメタが含まれる。なお、X軸、Y軸及びZ軸は、世界座標系の基準軸である。

上記の実験条件1による実験結果1を説明する。具体的には、9個のカメラパラメタについて、正解値近傍での評価値が、図12A~図14Bに示すように得られた。各図中の横軸が各カメラパラメタの値を示し、縦軸が評価値Jを示す。変化させるカメラパラメタはそれぞれ、図12Aではcu、図12Bではcv、図12Cではf、図12Dではdpx、図13AではRX、図13BではRY、図13CではRZ、図14AではTY、図14BではTZである。
実験条件2では、本開示のカメラパラメタセット算出装置111を用いて自己校正処理S111を実施することにより、誤差を小さくするようにカメラパラメタを算出し、算出結果を検証する実験を行った。
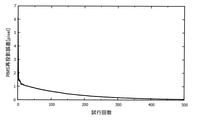
上記の実験条件2による実験結果2を説明する。具体的には、実験結果2の例が、図15A及び図15Bに示すように得られた。図15Aでは、横軸が試行回数を示し、縦軸が式10の評価値Jを示す。つまり、図15Aでは、横軸の回数での試行を実施して得られたカメラパラメタを用いて算出した評価値が、縦軸の値で示されている。図15Bでは、横軸が試行回数を示し、縦軸が再投影誤差のRMS値を示す。再投影誤差とは、算出したカメラパラメタが、式1と式3とを満たす度合いを表す。具体的には、カメラ101bのカメラ画像Ibに映った被写体上の3次元座標とその画素座標との組の正解値が既知である場合に、算出したカメラ101bのカメラパラメタを用いて、正解の3次元座標をカメラ画像Ib上に投影した画素座標を算出し、算出した画素座標と正解の画素座標との差を、再投影誤差と呼ぶ。すなわち、再投影誤差が小さいほど、式1及び式3を満たすような、正解との誤差が小さいカメラパラメタであることを表す。図15A及び図15Bのいずれにおいても、試行回数が増えるほど評価値が小さくなる。よって、2つのカメラ画像の投影点における2つの画素値の差が小さくなる。同時に、試行回数が増えるほど再投影誤差も小さくなっている。
実施の形態に係るカメラパラメタセット算出装置111の自己校正処理では、カメラパラメタの誤差が大きいカメラ、すなわち校正対象のカメラは、ユーザによって特定されており、ユーザによる入力によって特定のカメラの校正動作が開始するものとした。校正対象のカメラの決定は、ユーザにより指定に限定されず、別の方法であってもよい。


実施の形態に係るカメラパラメタセット算出装置111は、ユーザによる入力を、自己校正処理S111の開始のトリガとしていたが、これに限定されない。カメラパラメタセット算出装置111は、自己校正処理S111の開始を、他のトリガによって自動的に開始してもよい。例えば、カメラパラメタセット算出装置111は、温度センサ、衝撃センサ、タイマ等のセンサからの入力をトリガとして、自動的に自己校正を開始してもよい。
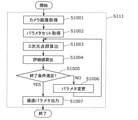
実施の形態に係るカメラパラメタセット算出装置111は、自己校正処理S111において、ステップS1003では、カメラ画像Ia及びIb間でN個の対応点の組を抽出し、さらに抽出されたN個の対応点の組のそれぞれに対する被写体上の点(測距点)の3次元座標をステレオ測距技術により算出し、ステップS1004では、3次元座標を用いて評価値Jを算出した。しかしながら、評価値Jの算出に測距点を全て用いる必要はない。
実施の形態及び変形例に係る自己校正処理において、カメラパラメタセット算出装置の自己校正処理で用いる評価値Jに、上記の式10に示すように、複数の測距点それぞれに対応する画素値の差の絶対値の和に基づく評価関数が適用された。しかしながら、評価関数は、上記に限定されるものではなく、測距点に対応する2つのカメラ画像の画素値の差に基づく関数であれば、他の関数であってもよい。例えば、評価関数は、複数の測距点それぞれに対応する2つのカメラ画像の2つの画素値の差の2乗の総和を用いる評価関数でもよい。具体的には、測距点をカメラ画像Iaへ投影した第1投影点での画素値と同一の測距点をカメラ画像Ibへ投影した第2投影点での画素値との差の2乗を各測距点について求めて、求めた値を加算する評価関数の例を、下記の式15に示す。

以上、本開示の1つ以上の態様に係るカメラパラメタセット算出装置等について、実施の形態等に基づいて説明したが、本開示は、実施の形態等に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を本実施の形態等に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、本開示の1つ以上の態様の範囲内に含まれてもよい。
100 撮像部
101,101a,101b カメラ
110,310 画像処理部
111,311 カメラパラメタセット算出装置
112 カメラパラメタ記憶部
113 画像生成部
120 ディスプレイ
300 コンピュータ
301 CPU
302 ROM
303 RAM
304 HDD
305 ビデオ入力I/F
306 ビデオカード
901 取得部
902 3次元点群算出部
903 評価値算出部
904 カメラパラメタ決定部
905 カメラパラメタ出力部
906 センサ情報取得部
Claims (21)
- 複数のカメラで撮影された画像と前記複数のカメラのカメラパラメタセットとを用いて、カメラパラメタセットを算出する少なくとも1つの制御回路を備え、
前記少なくとも1つの制御回路は、
(a1)前記複数のカメラの第1カメラで撮影された第1画像と、前記複数のカメラの第2カメラで撮影された第2画像とを取得し、
(a2)前記第1カメラの1つ以上のカメラパラメタを含む第1カメラパラメタセットと、前記第2カメラの1つ以上のカメラパラメタを含む第2カメラパラメタセットとを取得し、
(a3)前記第1画像、前記第2画像、前記第1カメラパラメタセット及び前記第2カメラパラメタセットに基づいて、前記第1画像及び前記第2画像における被写体が部分的に重複して映し出される重複領域上の3次元座標を複数算出し、
(a4)前記第1カメラパラメタセットに基づいて前記複数の3次元座標を前記第1画像に投影した複数の第1画素座標を決定し、前記第2カメラパラメタセットに基づいて前記複数の3次元座標を前記第2画像に投影した複数の第2画素座標を決定し、
(a5)前記第1画像における前記複数の第1画素座標での複数の画素値と前記第2画像における前記複数の第2画素座標での複数の画素値とに基づいて評価値を算出し、
(a6)前記評価値に基づいて、前記第1カメラパラメタセット及び前記第2カメラパラメタセットを更新し、
(a7)更新された前記第1カメラパラメタセット及び前記第2カメラパラメタセットを出力する
カメラパラメタセット算出装置。 - 前記第1画像及び前記第2画像は、
(i)車両の前部に配置されたカメラで前記車両の前方を撮影した画像、及び前記車両の左部に配置されたカメラで前記車両の左方を撮影した画像の組み合わせ、
(ii)車両の前部に配置されたカメラで前記車両の前方を撮影した画像、及び前記車両の右部に配置されたカメラで前記車両の右方を撮影した画像の組み合わせ、
(iii)車両の後部に配置されたカメラで前記車両の後方を撮影した画像、及び前記車両の左部に配置されたカメラで前記車両の左方を撮影した画像の組み合わせ、
(iv)車両の後部に配置されたカメラで前記車両の後方を撮影した画像、及び前記車両の右部に配置されたカメラで前記車両の右方を撮影した画像の組み合わせ、
のうちのいずれかの組み合わせである
請求項1に記載のカメラパラメタセット算出装置。 - 前記少なくとも1つの制御回路は、
処理(a5)では、前記第1画素座標における前記第1画像の画素値と前記第2画素座標における前記第2画像の画素値との差異に基づいて前記評価値を算出する
請求項1または2に記載のカメラパラメタセット算出装置。 - 前記少なくとも1つの制御回路は、
前記複数のカメラの第3カメラで撮影された第3画像と、前記第3カメラの第3カメラパラメタセットとをさらに取得し、
前記第1画像、前記第2画像及び前記第3画像から、2つの画像により構成される複数の組を決定し、
前記複数の組それぞれに含まれる2つの画像に対して、処理(a3)~処理(a5)を順次行う
請求項1~3のいずれか一項に記載のカメラパラメタセット算出装置。 - 前記少なくとも1つの制御回路は、
前記複数のカメラの第3カメラで撮影された第3画像と、前記第3カメラの第3カメラパラメタセットとをさらに取得し、
前記第1画像、前記第2画像及び前記第3画像から、2つの画像により構成される複数の組を決定し、
前記複数の組それぞれに含まれる2つの画像に対して、処理(a3)~処理(a5)を行って得られる画素値を用いて、前記評価値を算出する
請求項1~3のいずれか一項に記載のカメラパラメタセット算出装置。 - 前記第1画像及び前記第2画像は、被写体の一部が重複して映る第1重複領域を含み、
前記第2画像及び前記第3画像は、被写体の一部が重複して映る第2重複領域を含み、
前記第1重複領域と前記第2重複領域とは、重複しない
請求項4または5に記載のカメラパラメタセット算出装置。 - 前記第1画像及び前記第2画像はそれぞれ、光軸中心での光軸の方向が互いに交差する方向であるように配置された前記第1カメラ及び前記第2カメラで撮影された画像である
請求項1~6のいずれか一項に記載のカメラパラメタセット算出装置。 - (a1)複数のカメラの第1カメラで撮影された第1画像と、前記複数のカメラの第2カメラで撮影された第2画像とを取得し、
(a2)前記第1カメラの1つ以上のカメラパラメタを含む第1カメラパラメタセットと、前記第2カメラの1つ以上のカメラパラメタを含む第2カメラパラメタセットとを取得し、
(a3)前記第1画像、前記第2画像、前記第1カメラパラメタセット及び前記第2カメラパラメタセットに基づいて、前記第1画像及び前記第2画像における被写体が部分的に重複して映し出される重複領域上の3次元座標を複数算出し、
(a4)前記第1カメラパラメタセットに基づいて前記複数の3次元座標を前記第1画像に投影した複数の第1画素座標を決定し、前記第2カメラパラメタセットに基づいて前記複数の3次元座標を前記第2画像に投影した複数の第2画素座標を決定し、
(a5)前記第1画像における前記複数の第1画素座標での複数の画素値と前記第2画像における前記複数の第2画素座標での複数の画素値とに基づいて評価値を算出し、
(a6)前記評価値に基づいて、前記第1カメラパラメタセット及び前記第2カメラパラメタセットを更新し、
(a7)更新された前記第1カメラパラメタセット及び前記第2カメラパラメタセットを出力し、
処理(a1)~処理(a7)の少なくとも1つがプロセッサによって実行される
カメラパラメタセット算出方法。 - 前記第1画像及び前記第2画像は、
(i)車両の前部に配置されたカメラで前記車両の前方を撮影した画像、及び前記車両の左部に配置されたカメラで前記車両の左方を撮影した画像の組み合わせ、
(ii)車両の前部に配置されたカメラで前記車両の前方を撮影した画像、及び前記車両の右部に配置されたカメラで前記車両の右方を撮影した画像の組み合わせ、
(iii)車両の後部に配置されたカメラで前記車両の後方を撮影した画像、及び前記車両の左部に配置されたカメラで前記車両の左方を撮影した画像の組み合わせ、
(iv)車両の後部に配置されたカメラで前記車両の後方を撮影した画像、及び前記車両の右部に配置されたカメラで前記車両の右方を撮影した画像の組み合わせ、
のうちのいずれかの組み合わせである
請求項8に記載のカメラパラメタセット算出方法。 - 処理(a5)では、前記第1画素座標における前記第1画像の画素値と前記第2画素座標における前記第2画像の画素値との差異に基づいて前記評価値を算出する
請求項8または9に記載のカメラパラメタセット算出方法。 - 前記複数のカメラの第3カメラで撮影された第3画像と、前記第3カメラの第3カメラパラメタセットとをさらに取得し、
前記第1画像、前記第2画像及び前記第3画像から、2つの画像により構成される複数の組を決定し、
前記複数の組それぞれに含まれる2つの画像に対して、処理(a3)~処理(a5)を順次行う
請求項8~10のいずれか一項に記載のカメラパラメタセット算出方法。 - 前記複数のカメラの第3カメラで撮影された第3画像と、前記第3カメラの第3カメラパラメタセットとをさらに取得し、
前記第1画像、前記第2画像及び前記第3画像から、2つの画像により構成される複数の組を決定し、
前記複数の組それぞれに含まれる2つの画像に対して、処理(a3)~処理(a5)を行って得られる画素値を用いて、前記評価値を算出する
請求項8~10のいずれか一項に記載のカメラパラメタセット算出方法。 - 前記第1画像及び前記第2画像は、被写体の一部が重複して映る第1重複領域を含み、
前記第2画像及び前記第3画像は、被写体の一部が重複して映る第2重複領域を含み、
前記第1重複領域と前記第2重複領域とは、重複しない
請求項11または12に記載のカメラパラメタセット算出方法。 - 前記第1画像及び前記第2画像はそれぞれ、光軸中心での光軸の方向が互いに交差する方向であるように配置された前記第1カメラ及び前記第2カメラで撮影された画像である
請求項8~13のいずれか一項に記載のカメラパラメタセット算出方法。 - コンピュータに実行させるプログラムであって、
(a1)複数のカメラの第1カメラで撮影された第1画像と、前記複数のカメラの第2カメラで撮影された第2画像とを取得し、
(a2)前記第1カメラの1つ以上のカメラパラメタを含む第1カメラパラメタセットと、前記第2カメラの1つ以上のカメラパラメタを含む第2カメラパラメタセットとを取得し、
(a3)前記第1画像、前記第2画像、前記第1カメラパラメタセット及び前記第2カメラパラメタセットに基づいて、前記第1画像及び前記第2画像における被写体が部分的に重複して映し出される重複領域上の3次元座標を複数算出し、
(a4)前記第1カメラパラメタセットに基づいて前記複数の3次元座標を前記第1画像に投影した複数の第1画素座標を決定し、前記第2カメラパラメタセットに基づいて前記複数の3次元座標を前記第2画像に投影した複数の第2画素座標を決定し、
(a5)前記第1画像における前記複数の第1画素座標での複数の画素値と前記第2画像における前記複数の第2画素座標での複数の画素値とに基づいて評価値を算出し、
(a6)前記評価値に基づいて、前記第1カメラパラメタセット及び前記第2カメラパラメタセットを更新し、
(a7)更新された前記第1カメラパラメタセット及び前記第2カメラパラメタセットを出力する
ことを前記コンピュータに実行させるプログラム。 - 前記第1画像及び前記第2画像は、
(i)車両の前部に配置されたカメラで前記車両の前方を撮影した画像、及び前記車両の左部に配置されたカメラで前記車両の左方を撮影した画像の組み合わせ、
(ii)車両の前部に配置されたカメラで前記車両の前方を撮影した画像、及び前記車両の右部に配置されたカメラで前記車両の右方を撮影した画像の組み合わせ、
(iii)車両の後部に配置されたカメラで前記車両の後方を撮影した画像、及び前記車両の左部に配置されたカメラで前記車両の左方を撮影した画像の組み合わせ、
(iv)車両の後部に配置されたカメラで前記車両の後方を撮影した画像、及び前記車両の右部に配置されたカメラで前記車両の右方を撮影した画像の組み合わせ、
のうちのいずれかの組み合わせである
請求項15に記載のプログラム。 - 処理(a5)では、前記第1画素座標における前記第1画像の画素値と前記第2画素座標における前記第2画像の画素値との差異に基づいて前記評価値を算出する
請求項15または16に記載のプログラム。 - 前記複数のカメラの第3カメラで撮影された第3画像と、前記第3カメラの第3カメラパラメタセットとをさらに取得し、
前記第1画像、前記第2画像及び前記第3画像から、2つの画像により構成される複数の組を決定し、
前記複数の組それぞれに含まれる2つの画像に対して、処理(a3)~処理(a5)を順次行う
請求項15~17のいずれか一項に記載のプログラム。 - 前記複数のカメラの第3カメラで撮影された第3画像と、前記第3カメラの第3カメラパラメタセットとをさらに取得し、
前記第1画像、前記第2画像及び前記第3画像から、2つの画像により構成される複数の組を決定し、
前記複数の組それぞれに含まれる2つの画像に対して、処理(a3)~処理(a5)を行って得られる画素値を用いて、前記評価値を算出する
請求項15~17のいずれか一項に記載のプログラム。 - 前記第1画像及び前記第2画像は、被写体の一部が重複して映る第1重複領域を含み、
前記第2画像及び前記第3画像は、被写体の一部が重複して映る第2重複領域を含み、
前記第1重複領域と前記第2重複領域とは、重複しない
請求項18または19に記載のプログラム。 - 前記第1画像及び前記第2画像はそれぞれ、光軸中心での光軸の方向が互いに交差する方向であるように配置された前記第1カメラ及び前記第2カメラで撮影された画像である
請求項15~20のいずれか一項に記載のプログラム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017091207 | 2017-05-01 | ||
| JP2017091207 | 2017-05-01 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018190402A JP2018190402A (ja) | 2018-11-29 |
| JP7002007B2 true JP7002007B2 (ja) | 2022-01-20 |
Family
ID=63917576
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018079354A Active JP7002007B2 (ja) | 2017-05-01 | 2018-04-17 | カメラパラメタセット算出装置、カメラパラメタセット算出方法及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10645365B2 (ja) |
| JP (1) | JP7002007B2 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7038345B2 (ja) * | 2017-04-20 | 2022-03-18 | パナソニックIpマネジメント株式会社 | カメラパラメタセット算出方法、カメラパラメタセット算出プログラム及びカメラパラメタセット算出装置 |
| JP7054803B2 (ja) * | 2017-07-21 | 2022-04-15 | パナソニックIpマネジメント株式会社 | カメラパラメタセット算出装置、カメラパラメタセット算出方法及びプログラム |
| JP2020042665A (ja) * | 2018-09-12 | 2020-03-19 | キヤノン株式会社 | 情報処理装置、情報処理装置の制御方法及びプログラム |
| JPWO2020170288A1 (ja) * | 2019-02-18 | 2021-03-11 | 三菱電機株式会社 | 画像処理装置、画像処理方法、及び画像処理プログラム |
| US10906184B2 (en) | 2019-03-29 | 2021-02-02 | Mujin, Inc. | Method and control system for verifying and updating camera calibration for robot control |
| US10399227B1 (en) * | 2019-03-29 | 2019-09-03 | Mujin, Inc. | Method and control system for verifying and updating camera calibration for robot control |
| CN110753217B (zh) * | 2019-10-28 | 2022-03-01 | 黑芝麻智能科技(上海)有限公司 | 色彩平衡方法和装置、车载设备以及存储介质 |
| US12260604B2 (en) | 2019-10-30 | 2025-03-25 | Nec Corporation | Matching support apparatus, matching support method, and computer-readable recording medium |
| CN111698467B (zh) * | 2020-05-08 | 2022-05-06 | 北京中广上洋科技股份有限公司 | 基于多摄像机的智能跟踪方法及系统 |
| JP7754918B2 (ja) * | 2021-03-04 | 2025-10-15 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | ニューラルネットワークのネットワークパラメータの学習方法、カメラパラメータの算出方法、及びプログラム |
| WO2023283929A1 (zh) * | 2021-07-16 | 2023-01-19 | 华为技术有限公司 | 双目相机外参标定的方法及装置 |
| JP2023038128A (ja) * | 2021-09-06 | 2023-03-16 | キヤノン株式会社 | 情報処理装置、機械学習モデル、情報処理方法、及びプログラム |
| DE102022200819A1 (de) * | 2022-01-25 | 2023-07-27 | Carl Zeiss Meditec Ag | Verfahren zum Betreiben eines stereoskopischen medizinischen Mikroskops und medizinisches Mikroskop |
| DE102022103940A1 (de) * | 2022-02-18 | 2023-08-24 | Dspace Gmbh | Prüfaufbau und Verfahren zum Testen einer Stereokamera |
| US20240224872A9 (en) * | 2022-10-23 | 2024-07-11 | Agco International Gmbh | System And Method For Assisted Or Automated Crop Transfer |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010033503A (ja) | 2008-07-31 | 2010-02-12 | Kddi Corp | 画像生成装置、方法及びプログラム |
| JP2010109452A (ja) | 2008-10-28 | 2010-05-13 | Panasonic Corp | 車両周囲監視装置及び車両周囲監視方法 |
| JP2010250452A (ja) | 2009-04-14 | 2010-11-04 | Tokyo Univ Of Science | 任意視点画像合成装置 |
| JP2014238322A (ja) | 2013-06-07 | 2014-12-18 | パナソニック株式会社 | ステレオ測距装置及びステレオ測距方法 |
| JP2015133691A (ja) | 2013-12-13 | 2015-07-23 | パナソニックIpマネジメント株式会社 | 撮像装置、画像処理装置、撮像方法および記録媒体 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2309453A3 (en) | 1998-07-31 | 2012-09-26 | Panasonic Corporation | Image displaying apparatus and image displaying method |
| EP1266188B1 (en) | 2000-03-23 | 2006-05-17 | Snap-on Incorporated | Apparatus and method for calibrating the relative position between two measuring devices of a measuring system |
| AU2003289106A1 (en) * | 2002-12-27 | 2004-07-29 | Hiroshi Arisawa | Multi-view-point video capturing system |
| JP2012202694A (ja) | 2011-03-23 | 2012-10-22 | Canon Inc | カメラ校正方法 |
| CA2819956C (en) * | 2013-07-02 | 2022-07-12 | Guy Martin | High accuracy camera modelling and calibration method |
| JP6278771B2 (ja) | 2014-03-19 | 2018-02-14 | 三菱電機株式会社 | 投影位置決定装置及び投影位置決定プログラム |
| EP3467428A4 (en) * | 2016-05-30 | 2019-05-08 | Sony Corporation | INFORMATION PROCESSING DEVICE, INFORMATION PROCESSING PROCESS, PROGRAM AND IMAGE MANAGEMENT SYSTEM |
-
2018
- 2018-04-17 JP JP2018079354A patent/JP7002007B2/ja active Active
- 2018-04-24 US US15/961,041 patent/US10645365B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010033503A (ja) | 2008-07-31 | 2010-02-12 | Kddi Corp | 画像生成装置、方法及びプログラム |
| JP2010109452A (ja) | 2008-10-28 | 2010-05-13 | Panasonic Corp | 車両周囲監視装置及び車両周囲監視方法 |
| JP2010250452A (ja) | 2009-04-14 | 2010-11-04 | Tokyo Univ Of Science | 任意視点画像合成装置 |
| JP2014238322A (ja) | 2013-06-07 | 2014-12-18 | パナソニック株式会社 | ステレオ測距装置及びステレオ測距方法 |
| JP2015133691A (ja) | 2013-12-13 | 2015-07-23 | パナソニックIpマネジメント株式会社 | 撮像装置、画像処理装置、撮像方法および記録媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180316906A1 (en) | 2018-11-01 |
| US10645365B2 (en) | 2020-05-05 |
| JP2018190402A (ja) | 2018-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7002007B2 (ja) | カメラパラメタセット算出装置、カメラパラメタセット算出方法及びプログラム | |
| JP7038345B2 (ja) | カメラパラメタセット算出方法、カメラパラメタセット算出プログラム及びカメラパラメタセット算出装置 | |
| JP7054803B2 (ja) | カメラパラメタセット算出装置、カメラパラメタセット算出方法及びプログラム | |
| JP7016058B2 (ja) | カメラパラメタセット算出方法、カメラパラメタセット算出プログラム及びカメラパラメタセット算出装置 | |
| CN114913506B (zh) | 一种基于多视角融合的3d目标检测方法及装置 | |
| US11233983B2 (en) | Camera-parameter-set calculation apparatus, camera-parameter-set calculation method, and recording medium | |
| JP6603094B2 (ja) | キャリブレーション装置、キャリブレーション方法、及び、キャリブレーションプログラム | |
| EP3479352B1 (en) | Camera registration in a multi-camera system | |
| JP4814669B2 (ja) | 3次元座標取得装置 | |
| JP7018566B2 (ja) | 撮像装置、画像処理方法及びプログラム | |
| JP5455124B2 (ja) | カメラ姿勢パラメータ推定装置 | |
| JP2018179980A (ja) | カメラ校正方法、カメラ校正プログラム及びカメラ校正装置 | |
| JP6803570B2 (ja) | カメラパラメタセット算出装置、カメラパラメタセット算出方法、および、プログラム | |
| CN113763481B (zh) | 一种移动场景中多相机视觉三维地图构建与自标定方法 | |
| CN106168988A (zh) | 用于产生掩蔽规则以及用于掩蔽摄像机的图像信息的方法和设备 | |
| CN118470077B (zh) | 一种基于双目相机和激光雷达的多传感器融合的充电机器人自主定位方法及系统 | |
| CN113052974A (zh) | 物体三维表面的重建方法和装置 | |
| JP7074546B2 (ja) | 画像処理装置および方法 | |
| JP6854472B2 (ja) | 撮像装置、及び撮像方法 | |
| CN117830999A (zh) | 一种模拟汽车全景视觉进行场景感知的方法、装置 | |
| JP2018179577A (ja) | 位置計測装置 | |
| WO2019012004A1 (en) | METHOD FOR DETERMINING SPATIAL UNCERTAINTY IN IMAGES OF AN ENVIRONMENTAL REGION OF A MOTOR VEHICLE, DRIVING ASSISTANCE SYSTEM AND MOTOR VEHICLE | |
| CN116092050B (zh) | 机动车障碍物检测方法、装置及计算机可读存储介质 | |
| JP2021148730A (ja) | 位置推定方法、位置推定装置、及び、プログラム | |
| EP4637168A1 (en) | Camera calibration device and camera calibration method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211111 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211130 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211209 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7002007 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |