JP6997118B2 - 車両制御システム - Google Patents
車両制御システム Download PDFInfo
- Publication number
- JP6997118B2 JP6997118B2 JP2019008910A JP2019008910A JP6997118B2 JP 6997118 B2 JP6997118 B2 JP 6997118B2 JP 2019008910 A JP2019008910 A JP 2019008910A JP 2019008910 A JP2019008910 A JP 2019008910A JP 6997118 B2 JP6997118 B2 JP 6997118B2
- Authority
- JP
- Japan
- Prior art keywords
- orbit
- information
- unit
- track
- emergency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
より具体的には、本発明の車両制御システムは、車両の運動を制御する機械装置または電気装置の駆動を行う複数の駆動装置と、外界から入力された情報を取得し外界認識情報を生成するセンサおよび前記車両の状態を認識するセンサにより構成された複数の認識装置と、情報を表示する出力装置とが搭載された車両の制御を行う車両制御システムであって、
前記車両制御システムは、
前記複数の認識装置からの外界認識情報を統合し外界認識マップを作成する統合認識部と、
前記外界認識マップとユーザ入力に基づき前記車両の軌道生成を行い前記車両の運動の制御指示となる軌道情報を出力する軌道生成判断部と、
前記軌道情報を入力し前記複数の駆動装置に対して制御を行う運動制御部を有し、
前記統合認識部は、前記認識装置との通信に基づき、前記認識装置または前記認識装置と前記統合認識部の間の通信路で発生した障害を検知する障害検知部を備え、
前記運動制御部は、前記軌道生成判断部との通信に基づき、前記軌道生成判断部または前記軌道生成判断部との間の通信路で発生した障害を検知する軌道生成判断障害検知部を備え、
前記軌道生成判断部は、通常軌道生成部と、前記障害検知部または前記軌道生成判断障害検知部で障害を検知した際に使用する緊急軌道を生成する緊急軌道生成部であって、前記車両の走行中に前記車両制御システムによる運転からユーザが運転を引き継いだ際に、前記緊急軌道の最終状態をユーザに安全に引き渡せる状態にするように、引き渡し時の軌道とその後の軌道において、前記車両のハンドルの操縦角度または前記車両のタイヤの操舵角度が一定角度以下となる、または、一定力以上の前記車両のブレーキによる制動が必要ない状態となる、緊急軌道を生成する緊急軌道生成部を備え、
前記運動制御部は、前記緊急軌道生成部で生成された緊急軌道を保持する軌道保持部と、前記障害検知部または前記軌道生成判断障害検知部で障害を検知した際に前記通常軌道生成部で生成された通常軌道の軌道情報を使用する制御から前記軌道保持部に保持された緊急軌道の軌道情報を使用する制御に切り替える軌道切替部を備え、前記緊急軌道の軌道情報と前記緊急軌道の最終状態をユーザに安全に引き渡せる状態を持つ軌道区間を前記出力装置に送信し、
前記出力装置は、前記緊急軌道の軌道情報と前記軌道区間を表示することを特徴とする。
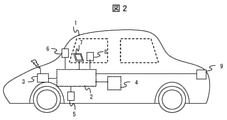
図2は本実施例の車両制御システムを有するシステムの概要である。1は自動車など内部に車両制御システムを有する車両システム、2は例えば車載ネットワーク(CAN:Controller Area Network、CANFD:CAN with Flexible Data-rate、Ethernet(登録商標)、等)とコントローラ(ECU:Electronic Control Unit等)により構成される車両制御システム、3は、車両システム1の外部と無線通信(例えば携帯電話の通信、無線LAN、WAN、等のプロトコルを使用した通信)を行い、外界(インフラ、他車)の情報または自車に関する情報を取得・送信などの無線通信を実施、または診断端子(OBD)やEthernet端子、外部記録媒体(例えばUSBメモリ、SDカード、等)端子などを有し、有線接続を行い車両制御システム2と有線通信を実施する通信装置、4は、例えば2と異なる、または同一のプロトコルを用いたネットワークにより構成される車両制御システム、5は、車両制御システム2の制御に従い、車両運動を制御する機械および電気装置(例えばエンジン、トランスミッション、ホイール、ブレーキ、操舵装置等)の駆動を行うアクチュエータ等の駆動装置、6は、外界から入力される情報を取得し、後述する外界認識情報を生成する、カメラ、レーダ、LIDAR、超音波センサなどの外界センサ、および、車両システム1の状態(運動状態、位置情報、等)を認識する力学系センサ(加速度、車輪速度、GPS:Global Positioning System)により構成される認識装置、7は、ネットワークシステムに有線または無線で接続され、ネットワークシステムから送出されるデータを受信し、メッセージ情報(例えば映像、音)など必要な情報を表示または出力する、液晶ディスプレイ、警告灯、スピーカなどの出力装置、8は、ユーザが車両制御システム2に対して、操作の意図や指示を入力する入力信号を生成するための、例えばステアリング、ペダル、ボタン、レバー、タッチパネル、等の入力装置、9は、車両システム1が外界に対して、車両の状態等を通知するための、ランプ、LED、スピーカ等の通知装置、を示している。
図4は、本発明にかかるネットワーク装置であるECU302またはGW303の内部構成の一例である。401はキャッシュやレジスタなどの記憶素子を持ち、制御を実行するCPUなどのプロセッサ、402はネットワークリンク301またはネットワークや専用線で接続された駆動装置5または/および認識装置6に対してデータの送受信を行うI/O(Input/Output)、403は図示しないクロックなどを使用し、時間および時刻の管理を行うタイマ、404はプログラムおよび不揮発性のデータを保存するROM(Read Only Memory)、405は揮発性のデータを保存するRAM(Random Access Memory)、406はECU内部での通信に用いられる内部バス、を示している。
車両制御システムの機能構成例について図6に示す。
認識装置6の種類は前記車両制御システムの構成で述べた通りであり、それぞれの認識装置の種類に応じた動作原理により、後述する外界認識情報を取得する。主には認識装置6が有するセンサが外界の物理的な測定値を取得し、測定値に対して特定のアルゴリズム(例えば、取得した画像に対する画像認識アルゴリズム)を適用し、外界情報を取得する。
外界認識情報とは、車両システムの外部に存在しており認識装置6により観測されたオブジェクトを表現する情報となる。外界認識情報の例として、オブジェクト種別(静止オブジェクト(壁、白線、信号、分離帯、木、等)、動的オブジェクト(歩行者、車、二輪車、自転車等)、走行(領域侵入)可能か否か、その他属性情報)、オブジェクトの相対位置情報(方向・距離)、オブジェクトの絶対位置情報(座標等)、オブジェクトの速度、向き(移動方向、顔の向き)、加速度、存在確率(確からしさ)、外界認識情報を測定した時間、測定を実施した認識装置6のID、等が挙げられる。
統合認識部602は、複数の認識装置6から受けた外界認識情報を統合した統合認識情報(例:外界認識マップ)を作成する。外界認識マップの例を図9に示す。ここでは直交する座標系(グリッド)(図9(a))に対し、それぞれの領域についてオブジェクト情報を配置した例について図9(b)示す。オブジェクト情報は、例えば上記外界認識情報の例から位置情報を除いた内容であり、それぞれのグリッドに配置される。
外界認識マップは、全て現在観測された外界認識情報を用いるのみではなく、過去の外界認識情報から予測(行動予測)して作成することも可能である。例えば一定時間経過後に、静止オブジェクトであれば同じ位置(車両との相対位置では無く、路面上の同位置)に存在している可能性が高く、また動的オブジェクトであれば直前の位置、速度、加速度等から、一定時間後の位置を予測することが可能となる。このように予測した外界認識情報を用いることにより、現在観測不可能な位置の情報についての予測を行うことが可能である。
外界認識マップに基づく軌道生成方法について説明する。軌道は、車両システムが安全に走行可能(例:他の障害物に衝突する可能性が低い)である安全性制約、車両システムが実現可能な加速度・減速度、ヨーレート、などの運動制約、を満たすように生成する。
認識装置6の障害発生の判定方法について説明する。統合認識部602は、認識装置6とネットワークまたは専用線等の通信経路を介して通信を行い、通信において障害の有無を判定する。通信経路の障害については、通信が行えない(通信処理がエラー応答、信号線の電位が異常)、通信の信号値が異常(例:CRCが不整合、固定データパターンが不一致)、等により、通信経路の障害が判定可能である。通信経路の障害については、他にも上記外界認識情報を送信する通信経路以外の通信経路を有し、前記経路から、外界認識情報を送信する通信経路の障害が発生したことを通知することも可能である。
軌道生成判断障害検知部6043の動作である、軌道生成判断部603の障害判定方法について説明する。運動制御部604は、軌道生成判断部603とネットワークまたは専用線等の通信経路を介して通信を行い、通信において障害の有無を判定する。通信経路の障害については、通信が行えない(通信処理がエラー応答、信号線の電位が異常)、通信の信号値が異常(例:CRCが不整合、固定データパターンが不一致)、等により、通信経路の障害が判定可能である。通信経路の障害については、他にも上記軌道情報を送信する通信経路以外の通信経路を有し、前記経路から、軌道情報を送信する通信経路の障害が発生したことを通知することも可能である。
障害検知部604で認識装置6の障害と判定された時や軌道生成判断障害検知部6043での軌道生成判断部603の障害判定で障害と判定された時、車両制御システム4は、行動予測や軌道生成ができなくなる。この状態を認識判断部の障害とし、障害検知部604および軌道生成判断障害検知部6043を認識判断部障害検知部と称す。
認識判断部障害時や、新たな軌道が生成できなくなった際に使用する、緊急軌道について説明する。軌道生成判断部603は、軌道生成判断部603や外界認識部が故障した際に、一定時間走行が可能な緊急軌道を計算するための緊急軌道生成部6032を持つ。
また、安全な軌道の別の例として、急停止が挙げられる。車両に故障が生じた場合は走行しないことが安全であると考えられるため、急停止により最短時間で停止状態に移行する。ただし、高速道路など、他の車両が高速移動している場合は、後続車両が存在しないことを前記行動予測の方法で予測することでより安全な停止を行うことが可能である。
外界認識機能や軌道生成判断部603等に障害があり、新たな軌道が生成できなくなった際に使用する緊急軌道を保持する軌道保持方法を説明する。
図12に軌道情報を記す。図12(a)に通常軌道と緊急軌道の例を示す。本実施例では、通常時の通常軌道と、前記緊急軌道生成で生成する緊急軌道の2本以上の軌道を持つ。各軌道は、任意の分解能で軌道情報(S1、S2)として、認識生成判断部603から運動制御部604に送られる。
軌道生成判断部603等に障害があった際に、通常の軌道情報から緊急軌道の軌道情報を使用する制御に切り替えるための軌道切替部6041について説明する。
車両制御システム3は、現在の車両の状態について、または、認識装置6の障害判定について、または、軌道生成判断部の出力装置7を介してユーザに、または車両の外部に対して通知装置9または通信装置3を介して出力する。例えば車両システム1のいずれかの部分に故障が発生した場合に、出力装置7を介してユーザに対して警告等の点灯、もしくは音による警告や振動装置による警告を実施する。また、出力装置7は、前記緊急軌道の残り時間を時間情報として出力し、ユーザに安全に動ける残り時間を通知する。
車両制御システム3は、入力装置8から車両の運転手や搭乗者からの操作を受付、ユーザ入力部603に操作情報を受け渡す。本実施例で用いるユーザからの操作入力では、入力装置8は、例えばハンドル、ブレーキペダル、アクセルペダル、クラッチペダル、サイドブレーキのレバーやスイッチ、ギアシフトレバーなどの変速装置のレバーやスイッチ、主電源などを操作するスイッチがある。運転手は、入力装置8を用いて、車両の挙動(操舵角の変更、加速、減速、変速装置の変更等)を変化させるユーザからの操作入力を行う。
2 車両制御システム
3 通信装置
4 車両制御システム
5 駆動装置
6 認識装置
7 出力装置
8 入力装置
9 通知装置
301 ネットワークリンク
302 ECU
303 GW
401 プロセッサ
402 I/O
403 タイマ
404 ROM
405 RAM
406 内部バス
501 制御部
502 通信管理部
503 時間管理部
504 データテーブル
505 バッファ
601 行動計画システム
602 統合認識部
603 軌道生成判断部
604 運動制御部
605 ユーザ入力部
606 出力管理部
607 通知管理部
608 障害検知部
1001 外界認識マップ
1300 表示装置
1301 状況表示
1302 進路表示
1303 障害箇所表示
S1 通常軌道情報
S2 緊急軌道情報
6031 通常軌道生成部
6032 緊急軌道生成部
6033 安全パターン確認部
6041 軌道切替部
6042 軌道保持部
6043 軌道生成判断障害検知部
6045 安全状態判定部
1901 緊急軌道パターン特定情報
1902 移行用の順序情報
1903 軌道情報の制御情報
1904 緊急軌道パターン特定情報
1905 緊急軌道パターン使用禁止判定結果
Claims (2)
- 車両の運動を制御する機械装置または電気装置の駆動を行う複数の駆動装置と、外界から入力された情報を取得し外界認識情報を生成するセンサおよび前記車両の状態を認識するセンサにより構成された複数の認識装置と、情報を表示する出力装置とが搭載された車両の制御を行う車両制御システムであって、
前記車両制御システムは、
前記複数の認識装置からの外界認識情報を統合し外界認識マップを作成する統合認識部と、
前記外界認識マップとユーザ入力に基づき前記車両の軌道生成を行い前記車両の運動の制御指示となる軌道情報を出力する軌道生成判断部と、
前記軌道情報を入力し前記複数の駆動装置に対して制御を行う運動制御部を有し、
前記統合認識部は、前記認識装置との通信に基づき、前記認識装置または前記認識装置と前記統合認識部の間の通信路で発生した障害を検知する障害検知部を備え、
前記運動制御部は、前記軌道生成判断部との通信に基づき、前記軌道生成判断部または前記軌道生成判断部との間の通信路で発生した障害を検知する軌道生成判断障害検知部を備え、
前記軌道生成判断部は、通常軌道生成部と、前記障害検知部または前記軌道生成判断障害検知部で障害を検知した際に使用する緊急軌道を生成する緊急軌道生成部であって、前記車両の走行中に前記車両制御システムによる運転からユーザが運転を引き継いだ際に、前記緊急軌道の最終状態をユーザに安全に引き渡せる状態にするように、引き渡し時の軌道とその後の軌道において、前記車両のハンドルの操縦角度または前記車両のタイヤの操舵角度が一定角度以下となる、または、一定力以上の前記車両のブレーキによる制動が必要ない状態となる、緊急軌道を生成する緊急軌道生成部を備え、
前記運動制御部は、前記緊急軌道生成部で生成された緊急軌道を保持する軌道保持部と、前記障害検知部または前記軌道生成判断障害検知部で障害を検知した際に前記通常軌道生成部で生成された通常軌道の軌道情報を使用する制御から前記軌道保持部に保持された緊急軌道の軌道情報を使用する制御に切り替える軌道切替部を備え、前記緊急軌道の軌道情報と前記緊急軌道の最終状態をユーザに安全に引き渡せる状態を持つ軌道区間を前記出力装置に送信し、
前記出力装置は、前記緊急軌道の軌道情報と前記軌道区間を表示することを特徴とする車両制御システム。 - 請求項1に記載の車両制御システムにおいて、
前記統合認識部は、前記認識装置に障害が発生した場合は、前記障害が発生した時刻以降の前記外界認識情報を前記外界認識マップの作成には使用せず、
前記障害が発生した時刻とは、前記認識装置に前記障害が発生したと判断された時刻から所定時間を引いた時刻である、ことを特徴とする車両制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019008910A JP6997118B2 (ja) | 2019-01-23 | 2019-01-23 | 車両制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019008910A JP6997118B2 (ja) | 2019-01-23 | 2019-01-23 | 車両制御システム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014160940A Division JP2016037149A (ja) | 2014-08-07 | 2014-08-07 | 車両制御システム、およびこれを備えた行動計画システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019059477A JP2019059477A (ja) | 2019-04-18 |
| JP2019059477A5 JP2019059477A5 (ja) | 2019-05-30 |
| JP6997118B2 true JP6997118B2 (ja) | 2022-01-17 |
Family
ID=66176168
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019008910A Active JP6997118B2 (ja) | 2019-01-23 | 2019-01-23 | 車両制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6997118B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4113477A4 (en) * | 2020-02-27 | 2023-08-02 | Panasonic Intellectual Property Management Co., Ltd. | ORDERING SYSTEM AND ORDERING METHOD |
| CN116224837B (zh) * | 2023-05-06 | 2023-07-28 | 湖南致同工程科技有限公司 | 可抗通信延迟的多无人压路车协同控制仿真系统及方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010198578A (ja) | 2009-02-27 | 2010-09-09 | Toyota Motor Corp | 移動軌跡生成装置 |
| JP2013147194A (ja) | 2012-01-20 | 2013-08-01 | Toyota Motor Corp | 車両の走行軌跡制御装置 |
| WO2014044480A2 (de) | 2012-09-21 | 2014-03-27 | Robert Bosch Gmbh | Verfahren und vorrichtung zum betreiben eines kraftfahrzeugs in einem automatisierten fahrbetrieb |
| WO2016021340A1 (ja) | 2014-08-07 | 2016-02-11 | 日立オートモティブシステムズ株式会社 | 車両制御システム、およびこれを備えた行動計画システム |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10309960A (ja) * | 1997-05-12 | 1998-11-24 | Toyota Motor Corp | 自動走行車両制御装置 |
-
2019
- 2019-01-23 JP JP2019008910A patent/JP6997118B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010198578A (ja) | 2009-02-27 | 2010-09-09 | Toyota Motor Corp | 移動軌跡生成装置 |
| JP2013147194A (ja) | 2012-01-20 | 2013-08-01 | Toyota Motor Corp | 車両の走行軌跡制御装置 |
| WO2014044480A2 (de) | 2012-09-21 | 2014-03-27 | Robert Bosch Gmbh | Verfahren und vorrichtung zum betreiben eines kraftfahrzeugs in einem automatisierten fahrbetrieb |
| WO2016021340A1 (ja) | 2014-08-07 | 2016-02-11 | 日立オートモティブシステムズ株式会社 | 車両制御システム、およびこれを備えた行動計画システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019059477A (ja) | 2019-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016021340A1 (ja) | 車両制御システム、およびこれを備えた行動計画システム | |
| JP6307383B2 (ja) | 行動計画装置 | |
| CN110636962B (zh) | 电子控制装置、车辆控制方法、以及存储装置 | |
| JP6803657B2 (ja) | 車両制御装置および車両制御システム | |
| CN110281920B (zh) | 车辆控制装置、车辆控制方法以及存储介质 | |
| CN103065500B (zh) | 车辆并道控制系统 | |
| US20140058579A1 (en) | Driving assist device and driving assist method | |
| US20200339194A1 (en) | Vehicle control apparatus, vehicle, and control method | |
| JP6454799B2 (ja) | 行動計画装置 | |
| US20200159234A1 (en) | Vehicle control device, vehicle control method, and storage medium | |
| JP6997118B2 (ja) | 車両制御システム | |
| JP6632581B2 (ja) | 走行制御装置、走行制御方法およびプログラム | |
| WO2023010043A1 (en) | Complementary control system for an autonomous vehicle | |
| JP6636484B2 (ja) | 走行制御装置、走行制御方法およびプログラム | |
| WO2023010042A1 (en) | Complementary control system for an autonomous vehicle | |
| US7515997B2 (en) | Method of identifying moving bodies | |
| US11352026B2 (en) | Vehicle, vehicle monitoring server, vehicle monitoring system, and vehicle monitoring method | |
| CN112428996B (zh) | 队列行驶系统和队列行驶方法 | |
| WO2020158342A1 (ja) | 車両制御装置および車両制御システム | |
| JP7187521B2 (ja) | 車両制御装置および車両制御システム | |
| JP7308880B2 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP7252993B2 (ja) | 制御装置、移動体、制御方法及びプログラム | |
| WO2022144976A1 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| WO2020044891A1 (ja) | 車両制御装置及び車両制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190123 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190125 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190417 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200811 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20201009 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201020 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210330 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20210507 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210514 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210520 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210727 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6997118 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |