以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰り返さない。
[第1の実施の形態]
<自動紙幣取扱いシステム1の全体構成>
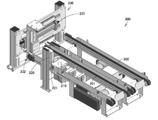
図1から図3に示すように、本実施の形態にかかる自動紙幣取扱いシステム1は、主に、制御装置100と、搬送装置200と、第1のアーム300と、第2のアーム400と、紙幣整頓装置500と、紙幣整理装置600と、第3のアーム700と、帯付け装置800と、収納ボックス900とを有するものである。なお、本実施の形態においては、搬送装置200と、第1のアーム300と、第2のアーム400と、紙幣整頓装置500と、紙幣整理装置600と、第3のアーム700と、帯付け装置800と、収納ボックス900とが台50の上部に載置され、制御装置100が台50の下に収納される。
制御装置100は、各種のプログラムやデータを格納するメモリ120と、自動紙幣取扱いシステム1の各部、すなわち、搬送装置200と、第1のアーム300と、第2のアーム400と、紙幣整頓装置500と、第3のアーム700と、帯付け装置800などとデータをやり取りする通信インターフェイス160と、プログラムに従って制御装置100を制御したり、通信インターフェイス160を介して自動紙幣取扱いシステム1の各部を制御したりするためのCPU110などを搭載する。
なお、自動紙幣取扱いシステム1の内の、紙幣格納容器10の搬送や開錠や開放や紙幣の取り出しなどに関する要素をまとめて、紙幣格納容器取扱いシステム2または開錠システム2)ともいう。
<自動紙幣取扱いシステム1の動作概要>
以下、図1〜図4を参照して、本実施の形態にかかる自動紙幣取扱いシステム1の動作について説明する。
搬送装置200は、制御装置100からの指令に基づいて、紙幣格納容器10(図5を参照)を搬送する(ステップS102)。搬送装置200は、自動紙幣取扱いシステム1が配置される部屋の外側から持ち込まれる紙幣格納容器10を第1のアーム300の近傍まで搬送する。本実施の形態においては、搬送装置200は、第1の搬送コンベア201と第2の搬送コンベア202と反転装置210とRFIDアンテナ220と移載装置230とを有する。
制御装置100は、RFIDアンテナ220からのデータに基づいて、鍵穴12を有する面、すなわち蓋11側の面を特定する(ステップS104)。詳細は後述するが、本実施の形態においては、紙幣格納容器10の鍵穴12を有さない面には、RFIDタグが取り付けられている。制御装置100は、RFIDアンテナ220からの信号に基づいて、RFIDアンテナ220がRFIDタグを検知した場合には、反対側の面に蓋11および鍵穴12があると判断して、そのまま紙幣格納容器10を移載装置230に受け渡す。
本実施の形態においては、移載装置230は、スライダ231,232などから構成され、紙幣格納容器10を第1の搬送コンベア201から第2の搬送コンベア202に受け渡す。
一方、制御装置100は、RFIDアンテナ220からの信号に基づいて、RFIDアンテナ220がRFIDを検知しなかった場合には、RFIDアンテナ220側の面に蓋11および鍵穴12があると判断して、当該面が第1のアーム300側になるように、反転装置210を用いて紙幣格納容器10を回動させる(ステップS106)。そして、制御装置100は、回動後の紙幣格納容器10を第2の搬送コンベア202に受け渡す。
第1のアーム300は、紙幣格納容器10の蓋11を開錠するための鍵310を有する。後述するように、第1のアーム300は、制御装置100からの指令に基づいて、鍵310の位置を前後左右上下に移動させたり鍵310を回転させたりすることによって鍵310を紙幣格納容器10の鍵穴12に差し込む。第1のアーム300は、制御装置100からの指令に基づいて、鍵310を回動させることによって紙幣格納容器10を開錠して、そのまま蓋11を開ける。より詳細には、制御装置100は、カメラから得た鍵穴12の上下位置のデータと鍵穴12の回転角度のデータを用いて、鍵310の回転角度を補正(アームを回転)させてから、鍵穴12の位置へ第1のアーム300を移動させる。
第2のアーム400は、紙幣をつかむための把持部410を有する。第2のアーム400は、制御装置100からの指令に基づいて、把持部410を前後左右上下に移動させることによって紙幣格納容器10内の紙幣をつかんだり、当該紙幣を取り出したり、当該紙幣を紙幣整頓装置500へ載置したりする。
制御装置100は、第1のアーム300を制御して紙幣格納容器10を施錠する。制御装置100は、搬送装置200の第2の搬送コンベア202を制御して、空になった紙幣格納容器10を部屋の外へ搬送する。
詳細は後述するが、本実施の形態においては、第2のアーム400は、把持部410の近傍にカメラ420が取り付けられる。そして、以下のような制御が実行される。すなわち、制御装置100は、搬送装置200を用いて紙幣格納容器10を第1のアーム300の正面の手前まで移動させる。制御装置100は、第2のアーム400のカメラ420で紙幣格納容器10の正面を撮影する(ステップS108)。制御装置100は、画像データに基づいて鍵穴12の位置を特定する(ステップS110)。制御装置100は、第1のアーム300を制御して、鍵310を鍵穴12まで移動させて挿入する。制御装置100は、第1のアーム300を制御して鍵310を回動させる(ステップS112)。制御装置100は、第1のアーム300を制御して紙幣格納容器10の蓋を開ける(ステップS114)。制御装置100は、第2のアーム400を制御して把持部410を紙幣格納容器10内に入れる。制御装置100は、第2のアーム400を制御して把持部410で紙幣を挟み込む。制御装置100は、第2のアーム400を制御して紙幣を引き出す(ステップS116)。制御装置100は、第2のアーム400を制御して把持部410を90度回転させて紙幣を垂直にさせる。制御装置100は、第2のアーム400を制御して紙幣を紙幣整頓装置500へ載置する。
紙幣整頓装置500は、制御装置100からの指令に基づいて、紙幣を整頓する。すなわち、紙幣整頓装置500は、紙幣の束の端部の位置を揃える(ステップS118)。より詳細には、本実施の形態においては、紙幣整頓装置500は、垂直に立てられた紙幣が第2のアーム400によって載置された際に、紙幣が倒れないように側方からプレートで支持する。そして、紙幣整頓装置500は、図示しないバイブレータによって紙幣に振動を加えることによって、垂直に立てられた紙幣の下面と側面の位置を揃える。本実施の形態においては、紙幣整頓装置500は、振動させたまま上方からプレートによって押さえることによって、紙幣の上面も揃えることができる。
制御装置100は、紙幣の整頓中に待機していた第2のアーム400を制御して、整頓された紙幣を再度つかむ。制御装置100は、第2のアーム400を制御して、整頓された紙幣を紙幣整理装置600の投入口へ載置する。本実施の形態においては、制御装置100は、第2のアーム400を制御して、投入口に載置された紙幣を把持部410の先端によって、奥へ押し込む。紙幣整理装置600は、第2のアーム400から受け渡された紙幣の各々の券種を判別し、券種ごとに分けて収納する(ステップS120)。
本実施の形態においては、紙幣整理装置600が整理に失敗した紙幣をリジェクトしてもよい。紙幣整理装置600が紙幣をリジェクトした場合(ステップS122にてYESである場合)、制御装置100は、第3のアーム700を制御して、把持部710によってリジェクトされた紙幣を掴む。制御装置100は、第2のアーム400を制御して、把持部410によって、第3のアーム700からリジェクトされた紙幣を受け取る。そして、制御装置100は、当該紙幣を再度、紙幣整理装置600の投入口に載置する(ステップS120)。
本実施の形態においては、紙幣整理装置600は、紙幣を整理する際に、各券種別に、整理・収納された枚数を表示する。紙幣整理装置600は、各券種別に所定枚数、たとえば100枚など、たまると整理を停止する。本実施の形態においては、第3のアーム700にもカメラが搭載され、制御装置100は、カメラが撮影した画像から券種毎の整理された紙幣の枚数を取得する。制御装置100は、いずれかの券種の整理された紙幣が所定枚数に達した場合に、第3のアーム700を制御して、把持部710によって当該紙幣を掴んで、帯付け装置800に受け渡す。なお、帯付け装置800に受け渡す前に、紙幣整頓装置500によって再度紙幣をそろえることが好ましい。
帯付け装置800は、所定枚数の紙幣の束に帯を巻きつける(ステップS124)。制御装置100は、第3のアーム700を制御して、帯で巻かれた紙幣を掴んで、収納ボックス900に投入する。本実施の形態においては、収納ボックス900は、券種毎に分かれていて、制御装置100は、第3のアーム700を制御して、帯が巻きつけられた紙幣を、その券種に応じた収納ボックス900に投入する(ステップS126)。
このように、本実施の形態のかかる自動紙幣取扱いシステム1においては、施錠された紙幣格納容器10の状態から、格納された複数種類の券種の紙幣を、自動的に、券種毎かつ所定枚数毎の帯封された紙幣の束に変換することができるので、従来よりも安全かつ便利に紙幣を取り扱うことが可能である。
なお、上記の実施の形態では、第3のアーム700がカメラを搭載し、制御装置100がカメラからの画像に基づいて、券種毎に所定枚数の紙幣が溜まったか否かを判断するものであった。しかしながら、紙幣整理装置600が、券種毎の整理し終わった紙幣の枚数のデータや所定枚数たまった旨の通知を制御装置100に送信してもよい。この場合は、第3のアーム700は、カメラを有していなくてもよい。
<紙幣格納容器取扱いシステム2の構成>
以下、本実施の形態にかかる紙幣格納容器取扱いシステム2の構成について説明する。
(搬送装置200の構成)
まず、搬送装置200について説明する。図6を参照して、搬送装置200は、紙幣格納容器10の投入側の搬送コンベア201と、紙幣格納容器10の排出側の搬送コンベア202と、反転装置210と、近接センサ221と、RFIDアンテナ220とを含む。
搬送コンベア201,202は、制御装置100の指令に応じて、紙幣格納容器10を搬送する。
反転装置210は、制御装置100の指令に応じて、紙幣格納容器10を水平方向に180°反転させる。より詳細には、図7に示すように、反転装置210は、紙幣格納容器10が載置される回転テーブル211と、搬送コンベア201を流れる紙幣格納容器10を所定の位置に停止させるためのガイド212と、回転テーブル211を持ち上げるための上昇シリンダ213と、回転テーブル211を回動させるための回転シリンダ214と、ガイドシリンダ215とを含む。
なお、本願では、搬送コンベア201,202上の紙幣格納容器10の位置は、光電センサで行っている。
(搬送装置200の動作)
本実施の形態においては、図8に示すように、搬送コンベア201に紙幣格納容器10が載置されると、制御装置100が、搬送コンベア201を制御して紙幣格納容器10を搬送する。図9に示すように、紙幣格納容器10は、反転装置210のガイド212に当接すると停止する。本実施の形態においては、近接センサ221が、紙幣格納容器10の存在を検知すると、その旨を制御装置100に通知する。制御装置100は、RFIDアンテナ220をONして紙幣格納容器10のRFIDタグを探索させる。
本実施の形態においては、RFIDタグ15(図12を参照。)が、紙幣格納容器10の蓋11の反対側の面に取り付けられている。制御装置100は、RFIDアンテナ220がRFIDタグ15を検知すると、搬送コンベア201を制御して紙幣格納容器10をそのまま搬送して、排出側の搬送コンベア202に受け渡す。
一方、制御装置100は、RFIDアンテナ220がRFIDタグ15を検知しなかった場合、回転テーブル211を180°回転させてから、搬送コンベア201を制御して紙幣格納容器10を搬送し、排出側の搬送コンベア202に受け渡す。
より詳細には、図10に示すように、紙幣格納容器10は、反転装置210のガイド212に当接した状態で停止する。この状態で、制御装置100は、RFIDタグ15が検知されない旨の通知を受けると図11に示すように、上昇シリンダ213を駆動させて、回転テーブル211および紙幣格納容器10を上昇させる。図12に示すように、制御装置100は、回転シリンダ214を駆動させて回転テーブル211および紙幣格納容器10を180°回動させる。回動後、制御装置100は、図10に示すように、上昇シリンダ213を下降させて、回転テーブル211および紙幣格納容器10を搬送コンベア201まで下降させる。
その後、制御装置100は、搬送コンベア201,202を制御して、紙幣格納容器10を第1のアーム300または第2のアーム400の正面まで移動させる。
(第1のアーム300の構成)
次に、第1のアーム300の構成について説明する。図13および図14に示すように、第1のアーム300は、鍵310の位置や角度や姿勢を制御するためのアーム本体302と、鍵310とを有する。第1のアーム300は、制御装置100から指令に基づいて、アーム本体302内部のモータやアクチュエータを駆動させて、紙幣格納容器10用の鍵310を6軸方向に回動させたり、移動させたりすることができる。
(第2のアーム400の構成)
次に、第2のアーム400の構成について説明する。図15〜図17に示すように、第2のアーム400は、把持部410の位置や角度や姿勢を制御するためのアーム本体402と、把持部410と、カメラ420とを有する。第2のアーム400は、制御装置100から指令に基づいて、アーム本体402内部のモータやアクチュエータを駆動させて、紙幣を掴むための把持部410や、鍵穴12を撮影するためのカメラ420を6軸方向に回動させたり、移動させたりすることができる。
(第1のアーム300および第2のアーム400の動作)
次に、図18を参照しながら、制御装置100による第1のアーム300と第2のアーム400の制御について説明する。本実施の形態においては、排出側の搬送コンベア202によって紙幣格納容器10が第1のアーム300または第2のアーム400の正面まで搬送されると、制御装置100が以下の処理を実行する。
まず、制御装置100のCPU110は、通信インターフェイス160を介して、第2のアーム400の制御することによって、図19に示すように、カメラ420を紙幣格納容器10の正面に移動させて、カメラ420によって紙幣格納容器10の正面を撮影させる(ステップS202)。
制御装置100のCPU110は、メモリ120から鍵穴12の基本画像を読み出す(ステップS204)。CPU110は、カメラ420からの画像と鍵穴12の基本画像とをマッチングさせることによって鍵穴12の位置を特定する(ステップS206)。CPU110は、マッチング結果に基づいて、現在の鍵310の位置に対する鍵穴12の位置を計算する(ステップS208)。CPU110は、通信インターフェイス160を介して第1のアーム300を制御することによって、図20に示すように、鍵310を鍵穴12の正面に移動させる(ステップS210)。
CPU110は、通信インターフェイス160を介して第1のアーム300を制御することによって、図21に示すように、鍵310を鍵穴12に挿入し(ステップS212)、鍵310を開錠方向に回動させる(ステップS214)。CPU110は、通信インターフェイス160を介して第1のアーム300を制御することによって、図5に示すように、鍵310と紙幣格納容器10の蓋11とを開ける(ステップS216)。このようにして、紙幣格納容器10の蓋11が自動的に解放される。
CPU110は、通信インターフェイス160を介して第2のアーム400を制御することによって、図22に示すように、把持部410を紙幣格納容器10に差し込んで紙幣を取り出してから(ステップS218)、当該紙幣を紙幣整頓装置500に受け渡す。
CPU110は、通信インターフェイス160を介して第1のアーム300を制御することによって、鍵310と紙幣格納容器10の蓋11とを閉める(ステップS220)。CPU110は、通信インターフェイス160を介して第1のアーム300を制御することによって、鍵310を施錠方向に回動し(ステップS222)、鍵310を紙幣格納容器10の鍵穴12から引き抜く(ステップS224)。
なお、この後、制御装置100は、排出側の搬送コンベア202を制御して、施錠された空の紙幣格納容器10を自動紙幣取扱いシステム1の外部へ移動させる。
このように、本実施の形態にかかる紙幣格納容器取扱いシステム2は、自動的に、紙幣格納容器10を開錠して、紙幣格納容器10の蓋11を開けて、紙幣格納容器10の紙幣を取り出して、紙幣格納容器10の蓋11を閉じて、紙幣格納容器10を施錠することができる。
[第2の実施の形態]
上記の実施の形態においては、第1のアーム300が1つの鍵310を搭載するものであったが、自動紙幣取扱いシステム1および紙幣格納容器取扱いシステム2は、複数種類の鍵に対応できてもよい。
たとえば、制御装置100のメモリ120が、複数種類の鍵のそれぞれに対応する複数種類の鍵穴の画像を格納する。そして、図18のステップS206において、CPU110が、撮影した鍵穴の画像と、メモリ120の複数種類の鍵穴の画像とを比較して、鍵穴の種類と、鍵の種類と、鍵穴の位置を特定する。なお、第1のアーム300が複数の鍵を選択可能に搭載してもよいし、複数の鍵が第1のアーム300の近傍に載置されてもよい。そして、図18のステップS210において、CPU110が、通信インターフェイス160を介して、第1のアーム300を制御することによって特定された鍵310に交換する。そして、CPU110は、通信インターフェイス160を介して第1のアーム300を制御することによって、図20に示すように、当該特定された鍵310を鍵穴12の正面に移動させる。
[第3の実施の形態]
上記の実施の形態においては、RFIDタグ15が紙幣格納容器10の蓋11の反対面に取り付けられるものであったが、RFIDタグ15が紙幣格納容器10の蓋11の方に取り付けられて、RFIDアンテナ220が第1のアーム300側に配置されてもよい。
あるいは、RFIDタグ15が紙幣格納容器10の蓋11の反対面に取り付けられて、RFIDアンテナ220が第1のアーム300側に配置されてもよい。この場合は、制御装置100は、RFIDタグ15が検知された場合に紙幣格納容器10を回動してから排出側の搬送コンベア202に進ませる。一方、制御装置100は、RFIDタグ15が検知されなかった場合に紙幣格納容器10を回動せずに、そのまま排出側の搬送コンベア202に進ませる。
当然ながら、RFIDタグ15が紙幣格納容器10の蓋11の面に取り付けられて、RFIDアンテナ220が第1のアーム300とは反対側に配置されてもよい。この場合は、制御装置100は、RFIDタグ15が検知された場合に紙幣格納容器10を回動してから排出側の搬送コンベア202に進ませる。一方、制御装置100は、RFIDタグ15が検知されなかった場合に紙幣格納容器10を回動せずに、そのまま排出側の搬送コンベア202に進ませる。
あるいは、RFIDタグ15が、紙幣格納容器10の蓋11の面とその反対側の面の両方に取り付けられて、蓋11や鍵穴12の面を特定するための情報が格納されていてもよい。
さらには、RFIDタグ15に限らず、紙幣格納容器10の上面や側面などに、蓋11や鍵穴12の面を特定するためのバーコードや特定の画像などが描かれて、RFIDアンテナ220の代わりに、光学センサやカメラなどによって蓋11や鍵穴12の面を特定してもよい。
さらには、RFIDタグ15に限らず、紙幣格納容器10の上面や側面などに、蓋11や鍵穴12の面を特定するための凹凸形状が形成されて、当該形状を接触センサや近接センサや画像センサなどによって検知することによって、蓋11や鍵穴12の面を特定してもよい。
[第4の実施の形態]
また、上記の実施の形態においては、紙幣格納容器10の蓋11に鍵穴12が形成されるものであった。しかしながら、紙幣格納容器10の鍵穴12は、蓋11に形成にされる形態には限られず、蓋11以外の個所に形成されてもよい。
[第5の実施の形態]
また、上記の実施の形態においては、紙幣格納容器10の蓋11が第1のアーム300に対向するように、紙幣格納容器10を反転装置210によって回動するものであった。しかしながら、紙幣格納容器10の鍵穴12の面の位置に合わせて、制御装置100が、第1のアーム300の鍵310を、鍵穴12の面まで移動させてもよい。すなわち、第1のアーム300が、紙幣格納容器10や搬送装置200を跨いで、鍵310を鍵穴12まで移動させる形態であってもよい。
あるいは、第1のアーム300が、搬送装置200の両側に配置されて、鍵穴12の面に対向する方の第1のアーム300が紙幣格納容器10を開錠したり施錠したりしてもよい。
[第6の実施の形態]
上記の実施の形態の構成に限らず、各装置の役割が別の装置によって担われてもよいし、1つの装置の役割が複数の装置によって分担されてもよいし、複数の装置の役割が1つの装置によって担われてもよい。たとえば、図23に示すように、制御装置100の役割が、第1のアーム300や第2のアーム400のコントローラによって担われてもよい。そして、図18のステップS204やステップS206の処理は、カメラ420のCPUやメモリが実行してもよいし、ステップS208やステップS210の処理は第1のアーム300のコントローラが実行してもよい。
[第7の実施の形態]
また、上記の実施の形態においては、カメラ420が第2のアーム400に取り付けられるものであった。しかしながら、カメラ420は、把持部410とは別の第3のアームに取り付けられてもよい。
あるいは、カメラ420は、鍵310と同じ第1のアーム300に取り付けられてもよい。
あるいは、カメラ420は、移動しないものであってもよい。すなわち、カメラ420は、台50に載置される支持部材に固定される形態であってもよい。
[まとめ]
上記の実施の形態においては、カメラ420と、1または複数の鍵310が取り付けられた第1のアーム300と、カメラ420から画像に基づいて鍵穴12の位置を特定し、第1のアーム300を制御することによって鍵穴12に鍵310を挿入し回動させることによって解錠するための制御装置100と、を備える開錠システム2が提供される。
好ましくは、鍵310は、紙幣が格納される紙幣格納容器10を開錠するための鍵である。制御装置100は、開錠後に第1のアーム300を制御して紙幣格納容器10の蓋を開け、紙幣取り出し後に第1のアーム300を制御することによって鍵310を回動させることによって施錠する。
好ましくは、制御装置100は、鍵穴12の画像を参照可能である。制御装置100は、カメラ420が取得した画像と鍵穴12の画像とに基づいて鍵穴12の位置を特定する。
好ましくは、制御装置100は、複数の鍵310それぞれに対応する複数の鍵穴12の画像を参照可能である。制御装置100は、カメラ420が取得した画像に基づいて、鍵穴12に対して使用すべき鍵310を特定する。
好ましくは、開錠システム2は、カメラ420が取り付けられる第2のアーム400をさらに備える。
好ましくは、カメラ420も第1のアーム300に設けられる。
好ましくは、カメラ420が固定されている。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した説明ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。