JP6961077B2 - X線撮像参照スキャン - Google Patents
X線撮像参照スキャン Download PDFInfo
- Publication number
- JP6961077B2 JP6961077B2 JP2020516732A JP2020516732A JP6961077B2 JP 6961077 B2 JP6961077 B2 JP 6961077B2 JP 2020516732 A JP2020516732 A JP 2020516732A JP 2020516732 A JP2020516732 A JP 2020516732A JP 6961077 B2 JP6961077 B2 JP 6961077B2
- Authority
- JP
- Japan
- Prior art keywords
- ray
- grid
- ray detector
- imaging device
- scan data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 title claims description 189
- 230000033001 locomotion Effects 0.000 claims description 106
- 230000005855 radiation Effects 0.000 claims description 106
- 238000007689 inspection Methods 0.000 claims description 62
- 238000000034 method Methods 0.000 claims description 39
- 239000000470 constituent Substances 0.000 claims description 38
- 238000010521 absorption reaction Methods 0.000 claims description 35
- 238000004590 computer program Methods 0.000 claims description 20
- 230000001427 coherent effect Effects 0.000 claims description 19
- 230000005540 biological transmission Effects 0.000 claims description 10
- LFEUVBZXUFMACD-UHFFFAOYSA-H lead(2+);trioxido(oxo)-$l^{5}-arsane Chemical compound [Pb+2].[Pb+2].[Pb+2].[O-][As]([O-])([O-])=O.[O-][As]([O-])([O-])=O LFEUVBZXUFMACD-UHFFFAOYSA-H 0.000 claims description 6
- 239000000463 material Substances 0.000 description 11
- 238000001514 detection method Methods 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 7
- 238000000295 emission spectrum Methods 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 238000001228 spectrum Methods 0.000 description 3
- 230000002238 attenuated effect Effects 0.000 description 2
- 238000002059 diagnostic imaging Methods 0.000 description 2
- 230000005672 electromagnetic field Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 2
- 229910052721 tungsten Inorganic materials 0.000 description 2
- 239000010937 tungsten Substances 0.000 description 2
- 208000006545 Chronic Obstructive Pulmonary Disease Diseases 0.000 description 1
- 206010016654 Fibrosis Diseases 0.000 description 1
- 208000019693 Lung disease Diseases 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000002745 absorbent Effects 0.000 description 1
- 239000002250 absorbent Substances 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000001066 destructive effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000004761 fibrosis Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 238000009607 mammography Methods 0.000 description 1
- 238000000206 photolithography Methods 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
- 235000013311 vegetables Nutrition 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/02—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material
- G01N23/04—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material and forming images of the material
- G01N23/041—Phase-contrast imaging, e.g. using grating interferometers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/42—Arrangements for detecting radiation specially adapted for radiation diagnosis
- A61B6/4291—Arrangements for detecting radiation specially adapted for radiation diagnosis the detector being combined with a grid or grating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/484—Diagnostic techniques involving phase contrast X-ray imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/488—Diagnostic techniques involving pre-scan acquisition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/58—Testing, adjusting or calibrating thereof
- A61B6/582—Calibration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/30—Accessories, mechanical or electrical features
- G01N2223/33—Accessories, mechanical or electrical features scanning, i.e. relative motion for measurement of successive object-parts
- G01N2223/3301—Accessories, mechanical or electrical features scanning, i.e. relative motion for measurement of successive object-parts beam is modified for scan, e.g. moving collimator
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- High Energy & Nuclear Physics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Public Health (AREA)
- Optics & Photonics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Description

− 物体が検査領域にない状態での撮像動作中に参照スキャンデータを獲得するために、X線検出器を検査領域に対して静止したままに保ちながら、格子構成部をスキャン運動でX線検出器に対していくつかの異なる位置に移動させ、それによりスキャン運動において縞パターンの組がX線検出器によって検出されるステップと、縞パターンの異なる組のために格子構成部をスキャン運動でX線検出器に対して同じ位置に移動させるステップと、を有する。
− 物体が検査領域にある状態での撮像動作中に物体スキャンデータを獲得するために、格子構成部をスキャン運動で、縞パターンの組のうちの1つのため参照スキャンデータを獲得するために使用されたのと同じ、X線検出器に対する位置に移動させるステップをさらに有し得る。
Claims (15)
- X線放射線のビームを放出するX線源と、
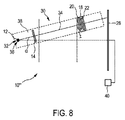
撮像される物体を収容する検査領域をはさんで前記X線源の反対側に配置されたX線検出器と、
前記X線源と前記X線検出器との間に配置され、前記X線検出器によって検出可能な前記X線放射線上の縞パターンを変調する格子構成部と、
を備える、X線撮像デバイスであって、
前記X線検出器上での前記格子構成部の占有面積が、前記X線検出器の放射線感受エリアよりも小さく、
前記X線撮像デバイスは、前記物体が前記検査領域にない状態での撮像動作中に、参照スキャンデータを獲得する、X線撮像デバイスにおいて、
前記X線撮像デバイスは、スキャン動作において縞パターンの組が前記X線検出器によって検出されるように、前記X線検出器が前記検査領域に対して静止したままで、前記格子構成部をスキャン運動で前記X線検出器に対していくつかの異なる位置に移動させることと、縞パターンの異なる組のために前記格子構成部をスキャン運動で前記X線検出器に対して前記異なる位置それぞれと同じ位置に移動させることとにより、前記参照スキャンデータを獲得することを特徴とする、X線撮像デバイス。 - 前記X線撮像デバイスは、前記物体が前記検査領域にある状態での撮像動作中に、前記格子構成部をスキャン運動で、縞パターンの前記組のうちの1つのため前記参照スキャンデータを獲得するために使用されたのと同じ、前記X線検出器に対する位置に移動させることにより、物体スキャンデータを獲得する、請求項1に記載のX線撮像デバイス。
- 前記X線撮像デバイスが、前記物体の画像を取得するために、前記参照スキャンデータから取得されるパラメータに基づいて前記物体スキャンデータをフィットさせる、請求項2に記載のX線撮像デバイス。
- 前記格子構成部は、位相コントラスト撮像及び/又は暗視野撮像を行うための撮像動作中に、少なくとも部分的にX線放射線の前記ビームの中に配置される、請求項3に記載のX線撮像デバイス。
- 前記格子構成部が2つの格子を備え、前記2つの格子が、各スキャン運動中に互いに対して固定された空間的関係を保つ、請求項4に記載のX線撮像デバイス。
- 前記X線撮像デバイスは、互いに対してインコヒーレントであり得る個々にコヒーレントなX線放射線の複数のビームを線源格子によって生成するように、前記X線源と前記検査領域との間に配置された前記線源格子を備える、請求項5に記載のX線撮像デバイス。
- 前記X線撮像デバイスは、前記物体が前記検査領域にない状態での撮像動作中に、前記X線検出器が前記検査領域に対して静止したままで、前記格子構成部をスキャン運動で前記X線検出器に対して少なくとも4つの異なる位置に移動させ、それにより前記スキャン運動において縞パターンの組が前記X線検出器によって検出されることと、縞パターンの少なくとも2つの異なる組のために、前記格子構成部をスキャン運動で前記X線検出器に対して前記少なくとも4つの異なる位置それぞれと同じ位置に移動させることとにより、前記参照スキャンデータを獲得する、請求項1、2、3、4、5、又は6に記載のX線撮像デバイス。
- 前記X線撮像デバイスが、後続する複数のスキャン運動の間に前記格子の互いに対する相対横方向位置を変えることにより、縞パターンの異なる組を生成する、請求項5又は6に記載のX線撮像デバイス。
- 前記X線撮像デバイスが、前記パラメータを取得するために前記参照スキャンデータに第1の関数をフィットさせることと、前記参照スキャンデータから取得された前記パラメータを使用して前記物体スキャンデータに第2の関数をフィットさせることとにより、前記参照スキャンデータ及び前記物体スキャンデータを処理する処理ユニットを備える、請求項8に記載のX線撮像デバイス。
- 前記処理ユニットが、前記参照スキャンデータにJxyα(z)=Ixyα(1+Vxyαcos(φxyα+2πz/p))である前記第1の関数をフィットさせ、ここで、Jxyα(z)は、前記格子の互いに対する相対横方向位置z、平均線束Ixyα、縞可視度Vxyα、縞位相φxyα、及び格子周期pに依存して、前記X線検出器に対する前記格子構成部の位置αについて、前記X線検出器のピクセルxyで獲得される前記参照スキャンデータである、請求項9に記載のX線撮像デバイス。
- 前記処理ユニットが、前記物体スキャンデータにKxyα=IxyαTxy(1+VxyαDxycos(ψxy+φxyα+2πz0/p))である前記第2の関数をフィットさせ、ここで、Kxyαは、前記格子の互いに対する相対横方向位置z0、物体透過Txy、暗視野Dxy、及び差分位相ψxyの画像について、前記X線検出器に対する前記格子構成部の前記位置αについて、前記X線検出器の前記ピクセルxyで獲得される前記物体スキャンデータである、請求項10に記載のX線撮像デバイス。
- 前記格子構成部の前記2つの格子が位相格子及び吸収格子であり、前記格子同士の間の距離は、前記格子構成部がタルボ・ロー型干渉計を形成するように、タルボ距離の要件にフィットさせて調整される、請求項11に記載のX線撮像デバイス。
- 請求項1に記載のX線撮像デバイスを動作させる方法であって、前記方法は、
物体が前記検査領域にない状態での撮像動作中に参照スキャンデータを獲得するために、前記スキャン運動において縞パターンの組が前記X線検出器によって検出されるように、X線検出器を検査領域に対して静止したままに保ちながら、格子構成部をスキャン運動で前記X線検出器に対していくつかの異なる位置に移動させるステップと、縞パターンの異なる組のために前記格子構成部をスキャン運動で前記X線検出器に対して前記異なる位置それぞれと同じ位置に移動させるステップとを有する、方法。 - 前記物体が前記検査領域にある状態での撮像動作中に物体スキャンデータを獲得するために、前記格子構成部をスキャン運動で、縞パターンの前記組のうちの1つのため前記参照スキャンデータを獲得するために使用されたのと同じ、前記X線検出器に対する位置に移動させるステップをさらに有する、請求項13に記載の方法。
- 請求項1に記載のX線撮像デバイスを動作させるためのコンピュータプログラムであって、前記コンピュータプログラムは、前記コンピュータプログラムがプロセッサ上で実行されたときに、請求項13に記載の方法を前記プロセッサに実行させるプログラムコード手段を備える、コンピュータプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17192846.8 | 2017-09-25 | ||
| EP17192846.8A EP3459461A1 (en) | 2017-09-25 | 2017-09-25 | X-ray imaging reference scan |
| PCT/EP2018/075643 WO2019057915A1 (en) | 2017-09-25 | 2018-09-21 | X-RAY IMAGING REFERENCE SCAN |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020534904A JP2020534904A (ja) | 2020-12-03 |
| JP2020534904A5 JP2020534904A5 (ja) | 2021-04-22 |
| JP6961077B2 true JP6961077B2 (ja) | 2021-11-05 |
Family
ID=60009429
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020516732A Active JP6961077B2 (ja) | 2017-09-25 | 2018-09-21 | X線撮像参照スキャン |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11231378B2 (ja) |
| EP (2) | EP3459461A1 (ja) |
| JP (1) | JP6961077B2 (ja) |
| CN (1) | CN111107787B (ja) |
| WO (1) | WO2019057915A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10295485B2 (en) | 2013-12-05 | 2019-05-21 | Sigray, Inc. | X-ray transmission spectrometer system |
| US10845491B2 (en) | 2018-06-04 | 2020-11-24 | Sigray, Inc. | Energy-resolving x-ray detection system |
| GB2591630B (en) | 2018-07-26 | 2023-05-24 | Sigray Inc | High brightness x-ray reflection source |
| US11056308B2 (en) | 2018-09-07 | 2021-07-06 | Sigray, Inc. | System and method for depth-selectable x-ray analysis |
| CN114729907B (zh) | 2019-09-03 | 2023-05-23 | 斯格瑞公司 | 用于计算机层析x射线荧光成像的系统和方法 |
| US11175243B1 (en) | 2020-02-06 | 2021-11-16 | Sigray, Inc. | X-ray dark-field in-line inspection for semiconductor samples |
| CN115667896B (zh) | 2020-05-18 | 2024-06-21 | 斯格瑞公司 | 使用晶体分析器和多个检测元件的x射线吸收光谱的系统和方法 |
| JP2023542674A (ja) | 2020-09-17 | 2023-10-11 | シグレイ、インコーポレイテッド | X線を用いた深さ分解計測および分析のためのシステムおよび方法 |
| US11686692B2 (en) | 2020-12-07 | 2023-06-27 | Sigray, Inc. | High throughput 3D x-ray imaging system using a transmission x-ray source |
| US11992350B2 (en) | 2022-03-15 | 2024-05-28 | Sigray, Inc. | System and method for compact laminography utilizing microfocus transmission x-ray source and variable magnification x-ray detector |
| US11885755B2 (en) | 2022-05-02 | 2024-01-30 | Sigray, Inc. | X-ray sequential array wavelength dispersive spectrometer |
| CN115861250B (zh) * | 2022-12-14 | 2023-09-22 | 深圳技术大学 | 自适应数据集的半监督医学图像器官分割方法及系统 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1731099A1 (en) | 2005-06-06 | 2006-12-13 | Paul Scherrer Institut | Interferometer for quantitative phase contrast imaging and tomography with an incoherent polychromatic x-ray source |
| WO2011070521A1 (en) * | 2009-12-10 | 2011-06-16 | Koninklijke Philips Electronics N.V. | Calibration of differential phase-contrast imaging systems |
| US8848863B2 (en) * | 2009-12-10 | 2014-09-30 | Koninklijke Philips N.V. | Non-parallel grating arrangement with on-the-fly phase stepping, X-ray system |
| EP2509504B1 (en) * | 2009-12-10 | 2018-07-18 | Koninklijke Philips N.V. | Scanning system for differential phase contrast imaging |
| JP5438649B2 (ja) * | 2010-03-26 | 2014-03-12 | 富士フイルム株式会社 | 放射線撮影システム及び位置ずれ判定方法 |
| JP2011224329A (ja) * | 2010-03-30 | 2011-11-10 | Fujifilm Corp | 放射線撮影システム及び方法 |
| JP2012040237A (ja) * | 2010-08-20 | 2012-03-01 | Fujifilm Corp | 放射線撮影システム及びその画像生成方法 |
| US9486175B2 (en) * | 2011-07-04 | 2016-11-08 | Koninklijke Philips N.V. | Phase contrast imaging apparatus |
| JP5475737B2 (ja) * | 2011-10-04 | 2014-04-16 | 富士フイルム株式会社 | 放射線撮影装置及び画像処理方法 |
| WO2014027333A1 (en) | 2012-08-17 | 2014-02-20 | Koninklijke Philips N.V. | Correction in x-ray imaging systems for differential phase contrast imaging |
| BR112015003425A2 (pt) * | 2012-08-20 | 2017-07-04 | Koninklijke Philips Nv | sistema de formação de imagens de raio x para formação de imagens de contraste de fases diferencial, método de manuseio de desalinhamento em um sistema de formação de imagens de raio x para formação de imagens de contraste de fases diferencial, elemento de programa de computador para controlar um aparelho, e meio legível por computador |
| US9357975B2 (en) * | 2013-12-30 | 2016-06-07 | Carestream Health, Inc. | Large FOV phase contrast imaging based on detuned configuration including acquisition and reconstruction techniques |
| JP2015008884A (ja) | 2013-06-28 | 2015-01-19 | 株式会社日立メディコ | X線画像診断装置 |
| JP6261730B2 (ja) * | 2013-06-28 | 2018-01-17 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | スリット走査位相コントラストイメージングにおける補正 |
| US9939392B2 (en) * | 2013-09-12 | 2018-04-10 | The United States Of America, As Represented By The Secretary, Department Of Health And Human Services | Demodulation of intensity modulation in X-ray imaging |
| EP3062093B1 (en) * | 2013-10-23 | 2023-07-26 | Nanovision Technology (Beijing) Co., Ltd. | Photon count-based radiation imaging system, method, and apparatus |
| JP6396472B2 (ja) | 2013-12-17 | 2018-09-26 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 走査微分位相コントラストシステムのための位相回復 |
| JP5725681B1 (ja) * | 2014-01-22 | 2015-05-27 | レーザーテック株式会社 | 干渉計及び位相シフト量測定装置 |
| JP2016032573A (ja) * | 2014-07-31 | 2016-03-10 | キヤノン株式会社 | トールボット干渉計、トールボット干渉システム、及び縞走査法 |
| JP6369206B2 (ja) * | 2014-08-06 | 2018-08-08 | コニカミノルタ株式会社 | X線撮影システム及び画像処理装置 |
| JP6543838B2 (ja) * | 2014-08-28 | 2019-07-17 | 株式会社緑野リサーチ | 位相撮影装置およびその復元方法 |
| US9925347B2 (en) | 2014-10-02 | 2018-03-27 | Koninklijke Philips N.V. | Cushion element for a patient interface |
| BR112017028283A2 (pt) | 2015-06-30 | 2018-09-04 | Koninklijke Philips N.V. | aparelho de imageamento |
| JP6430636B2 (ja) * | 2015-08-26 | 2018-11-28 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | デュアルエネルギー微分位相コントラスト撮像 |
-
2017
- 2017-09-25 EP EP17192846.8A patent/EP3459461A1/en not_active Withdrawn
-
2018
- 2018-09-21 US US16/650,220 patent/US11231378B2/en active Active
- 2018-09-21 CN CN201880061786.4A patent/CN111107787B/zh active Active
- 2018-09-21 EP EP18770036.4A patent/EP3687403B1/en active Active
- 2018-09-21 WO PCT/EP2018/075643 patent/WO2019057915A1/en unknown
- 2018-09-21 JP JP2020516732A patent/JP6961077B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20200232937A1 (en) | 2020-07-23 |
| WO2019057915A1 (en) | 2019-03-28 |
| CN111107787B (zh) | 2023-08-29 |
| JP2020534904A (ja) | 2020-12-03 |
| CN111107787A (zh) | 2020-05-05 |
| EP3687403B1 (en) | 2021-05-05 |
| EP3459461A1 (en) | 2019-03-27 |
| EP3687403A1 (en) | 2020-08-05 |
| US11231378B2 (en) | 2022-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6961077B2 (ja) | X線撮像参照スキャン | |
| KR101668219B1 (ko) | 비파괴 검사 장치 | |
| JP6422123B2 (ja) | 放射線画像生成装置 | |
| JP7171190B2 (ja) | 線源-検出器装置 | |
| JP5461438B2 (ja) | 位相コントラストイメージング用のx線検出器 | |
| JP5702586B2 (ja) | 放射線撮影システム | |
| JP5142539B2 (ja) | X線装置の焦点‐検出器システム | |
| JP5188721B2 (ja) | 投影または断層撮影による画像の作成方法、x線コンピュータ断層撮影システム、x線装置の焦点−検出器システムおよびx線システム | |
| JP5961614B2 (ja) | 位相差イメージングのための格子装置、位相差イメージングのための装置、当該装置を有するx線システム、当該装置の使用方法 | |
| US7492871B2 (en) | Focus/detector system of an x-ray apparatus for generating phase contrast recordings | |
| RU2562879C2 (ru) | Устройство для фазоконтрастного формирования изображений, содержащее перемещаемый элемент детектора рентгеновского излучения, и соответствующий способ | |
| JP5789613B2 (ja) | オンザフライ位相ステッピングを備えた非平行な格子装置、x線システム及び使用方法 | |
| JP5687618B2 (ja) | コンピュータ断層撮像用スキャナ及びスキャン方法 | |
| JP6820870B2 (ja) | 全視野検出器を備える走査x線装置 | |
| US20120250823A1 (en) | Calibration of differential phase-contrast imaging systems | |
| JP2007203066A (ja) | X線装置の焦点‐検出器装置のx線光学透過格子 | |
| JP6330467B2 (ja) | 等価ファントム、および等価ファントムを用いたx線タルボ撮影装置の品質評価方法 | |
| JP2016509872A (ja) | 高エネルギにおけるx線位相コントラストイメージング及びctのための大視野格子干渉計 | |
| CN106999137B (zh) | 用于x射线相衬断层合成成像的探测器和成像系统 | |
| JP2020038153A (ja) | 放射線画像生成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210309 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210309 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20210309 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20210402 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210812 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210913 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211012 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6961077 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |