JP6873218B2 - ミリ秒アニールシステムにおける基板支持 - Google Patents
ミリ秒アニールシステムにおける基板支持 Download PDFInfo
- Publication number
- JP6873218B2 JP6873218B2 JP2019223633A JP2019223633A JP6873218B2 JP 6873218 B2 JP6873218 B2 JP 6873218B2 JP 2019223633 A JP2019223633 A JP 2019223633A JP 2019223633 A JP2019223633 A JP 2019223633A JP 6873218 B2 JP6873218 B2 JP 6873218B2
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- contact
- substrate
- processor circuits
- stress
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 title claims description 107
- 238000000137 annealing Methods 0.000 title claims description 76
- 238000000034 method Methods 0.000 claims description 69
- 238000010438 heat treatment Methods 0.000 claims description 24
- 238000009826 distribution Methods 0.000 claims description 16
- 238000009529 body temperature measurement Methods 0.000 claims description 10
- 235000012431 wafers Nutrition 0.000 description 162
- 239000004065 semiconductor Substances 0.000 description 60
- 230000035882 stress Effects 0.000 description 55
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 36
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 36
- 230000008569 process Effects 0.000 description 31
- 229910052786 argon Inorganic materials 0.000 description 18
- 239000007789 gas Substances 0.000 description 15
- 238000005259 measurement Methods 0.000 description 13
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 12
- 238000001816 cooling Methods 0.000 description 9
- 239000010453 quartz Substances 0.000 description 8
- 238000012986 modification Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 239000013598 vector Substances 0.000 description 7
- 230000005484 gravity Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 239000000203 mixture Substances 0.000 description 4
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 238000010191 image analysis Methods 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 239000000243 solution Substances 0.000 description 3
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 2
- 238000011109 contamination Methods 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000002019 doping agent Substances 0.000 description 2
- 238000010891 electric arc Methods 0.000 description 2
- 238000007524 flame polishing Methods 0.000 description 2
- 238000005342 ion exchange Methods 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 238000002310 reflectometry Methods 0.000 description 2
- 239000012498 ultrapure water Substances 0.000 description 2
- NWUYHJFMYQTDRP-UHFFFAOYSA-N 1,2-bis(ethenyl)benzene;1-ethenyl-2-ethylbenzene;styrene Chemical compound C=CC1=CC=CC=C1.CCC1=CC=CC=C1C=C.C=CC1=CC=CC=C1C=C NWUYHJFMYQTDRP-UHFFFAOYSA-N 0.000 description 1
- 241001076960 Argon Species 0.000 description 1
- 229910001369 Brass Inorganic materials 0.000 description 1
- 241000208967 Polygala cruciata Species 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 235000013876 argon Nutrition 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 239000000498 cooling water Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000763 evoking effect Effects 0.000 description 1
- 238000013213 extrapolation Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 239000003456 ion exchange resin Substances 0.000 description 1
- 229920003303 ion-exchange polymer Polymers 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000010583 slow cooling Methods 0.000 description 1
- 241000894007 species Species 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000008646 thermal stress Effects 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
Images


















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67098—Apparatus for thermal treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/6719—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the processing chambers, e.g. modular processing chambers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/282—Testing of electronic circuits specially adapted for particular applications not provided for elsewhere
- G01R31/2831—Testing of materials or semi-finished products, e.g. semiconductor wafers or substrates
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer
- H01L21/18—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer the devices having semiconductor bodies comprising elements of Group IV of the Periodic Table or AIIIBV compounds with or without impurities, e.g. doping materials
- H01L21/30—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26
- H01L21/324—Thermal treatment for modifying the properties of semiconductor bodies, e.g. annealing, sintering
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67098—Apparatus for thermal treatment
- H01L21/67115—Apparatus for thermal treatment mainly by radiation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67248—Temperature monitoring
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68742—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by a lifting arrangement, e.g. lift pins
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N19/00—Investigating materials by mechanical methods
- G01N19/08—Detecting presence of flaws or irregularities
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67288—Monitoring of warpage, curvature, damage, defects or the like
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Toxicology (AREA)
- Health & Medical Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
Description
本願は、2015年12月30日に出願された、米国仮特許出願第62/272,841号、発明の名称「Wafer Support in a Millisecond Anneal System」の優先権の利益を主張するものであり、この文献は参照によって本願に組み込まれる。
本発明は、一般的に、基板、例えば半導体基板を処理するために使用される熱プロセスチャンバに関し、より詳細にはミリ秒アニール熱プロセスチャンバに関する。
本発明の例示的な態様は、半導体基板のミリ秒アニール中の半導体基板(例えば、ウェハ)の支持に関する。説明および考察を目的として、本発明の態様を、「ウェハ」または半導体ウェハを参照しながら考察する。当業者であれば、本明細書における開示内容によって、本発明の例示的な態様を、任意のワークピース、半導体基板または他の適切な基板に関連させて使用できることを理解するであろう。数値と関連させた「約」という語の使用は、記載された数値の10%以内を表す。
例示的なミリ秒アニールシステムは、集中的で短時間の露光を提供して、例えば約104℃/sを上回ることができる割合で、ウェハの上面を加熱するように構成することができる。図1には、ミリ秒アニールシステムを使用して達成される、半導体基板の例示的な温度プロフィール100が示されている。図1に図示されているように、半導体基板(例えば、シリコンウェハ)のバルクが、傾斜フェーズ102中に中間温度TIに加熱される。中間温度TIは、約450℃〜約900℃の範囲であってよい。中間温度TIに達すると、半導体基板の上面を、非常に短い集中的な閃光に晒すことができ、その結果、約104℃/sまでの加熱の割合が得られる。窓110は、短い集中的な閃光中の、半導体基板の温度プロフィールを示す。曲線112は、閃光による露光中の、半導体基板の上面の急速な加熱を示す。曲線116は、閃光による露光中の、半導体基板のその他の部分またはバルクの温度を表す。曲線114は、ヒートシンクとして機能する半導体基板のバルクを介する、半導体基板の上面の伝導冷却による急速な冷却を示す。半導体基板のバルクは、基板に関する高速な上面冷却速度を生じさせるヒートシンクとして機能する。曲線104は、冷却剤としてのプロセスガスを用いる、熱放射および熱対流による半導体基板のバルクの緩慢な冷却を示す。本明細書において使用されているように、「約」という語は、数値と関連させて使用される場合、記載された数値の30%以内を表す。
本発明の例示的な態様は、ウェハ面法線測定値を使用することによって、ミリ秒アニールプロセス中の半導体基板(例えば、ウェハ)の変形および/または応力分布を推定するための方法に関する。方法を、例えば、ウェハ面法線測定値および/または表面温度測定値に基づいて、1つまたは複数のプロセッサ回路によって実施することができる。方法は、時間にわたる半導体基板の形状および運動を規定するモデルを生成することができ、またモデルを使用することによって、支持ピンとの接触点における局所的な接触応力を推定することができる。幾つかの実施の形態においては、半導体基板にわたる応力分布を推定するために、温度測定値をモデルと共に使用することができる。
C+=minαij∈R(C) (1.3)
であり、ここでC+は、Cの極小値、または場合によってはCの最小値であり、また極小化は、実数Rに限定される多項式係数に関する。この極小化を、任意の数の非線形極小化法を使用して達成することができる。

Qn(x,z,tn)=Pn(x,z,tn)−Pn(x,z,t0) (1.11)
によって与えることができ、ここで、Qn(x,z,tn)は、時点tnにおける補正された多項式表面近似であり、t0は、平坦なウェハに関連付けられた時点を特定する。
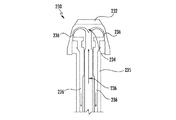
本発明の例示的な態様によれば、基板の表面が、例えば相対的な速度で支持ピンと接触した際に基板が受ける接触応力を低減することができる。より詳細には、幾つかの実施の形態においては、湾曲部の広がりが接触点におけるウェハ面法線の変化する角度に適応するように支持ピンの曲率半径を大きくすることによって、かつ/またはウェハ表面と接触する領域にわたり支持ピンの表面の平滑度を高めることによって、例えば石英支持ピンを火炎研磨して高めることによって、接触応力を低減することができる。
ROC=(d/2)/sinθmax
を使用することによって求めることができる。図16には、本発明の実施例による、支持ピン510の球状表面515に関するd/2およびθmaxの例が示されている。
[請求項1]
ミリ秒アニールシステムにおいて、
ウェハ支持プレートを有しているプロセスチャンバと、
基板を支持するように構成されている前記ウェハ支持プレートから延びる複数の支持ピンと、
を含んでおり、
前記複数の支持ピンのうちの少なくとも1つは、前記基板との接触点における基板面法線の変化する角度に適応するための球状表面プロフィールを有している、
ミリ秒アニールシステム。
[請求項2]
前記球状表面プロフィールは、前記基板との接触点における前記基板面法線の最大角度に少なくとも部分的に基づいて求められた範囲を有している、
請求項1記載のミリ秒アニールシステム。
[請求項3]
前記球状表面プロフィールは、少なくとも2倍の最大角度に関連付けられた範囲を有している、
請求項2記載のミリ秒アニールシステム。
[請求項4]
前記最大角度は、約2°〜約8°の範囲内にある、
請求項2記載のミリ秒アニールシステム。
[請求項5]
前記複数の支持ピンは、基板の中心に対して相対的な第1の半径方向の距離に配置されている第1の支持ピンと、前記基板の中心に対して相対的な第2の半径方向の距離に配置されている第2の支持ピンと、を含んでおり、前記第2の半径方向の距離は、前記第1の半径方向の距離よりも長い、
請求項1記載のミリ秒アニールシステム。
[請求項6]
前記第1の支持ピンは、第1の範囲を備えた球状表面プロフィールを有しており、前記第2の支持ピンは、第2の範囲を備えた球状表面プロフィールを有しており、前記第2の範囲は、前記第1の範囲よりも大きい、
請求項5記載のミリ秒アニールシステム。
[請求項7]
前記球状表面プロフィールは、研磨されている、
請求項1記載のミリ秒アニールシステム。
[請求項8]
前記支持ピンは、石英材料を含んでいる、
請求項1記載のミリ秒アニールシステム。
[請求項9]
前記支持ピンは、前記球状表面プロフィールを支持するベース構造を含んでいる、
請求項1記載のミリ秒アニールシステム。
[請求項10]
前記ベース構造は、垂直ベース構造である、
請求項9記載のミリ秒アニールシステム。
[請求項11]
前記ベース構造は、傾斜ベース構造である、
請求項9記載のミリ秒アニールシステム。
[請求項12]
前記ベース構造は、T字形の横断面を有している、
請求項9記載のミリ秒アニールシステム。
[請求項13]
ミリ秒アニールシステムにおける支持構造に由来する、基板における局所的な接触応力を求めるための方法において、
1つまたは複数のプロセッサ回路によって、所定の期間にわたり基板に関する複数の面法線推定値を取得するステップと、
前記1つまたは複数のプロセッサ回路によって、前記複数の面法線推定値に少なくとも部分的に基づいて、時間にわたる前記基板の底面プロフィールを規定するモデルを生成するステップと、
前記1つまたは複数のプロセッサ回路によって、前記モデルに少なくとも部分的に基づいて、前記基板と支持構造との間の接触点における局所的な接触応力を表すデータを求めるステップと、
を含んでいる方法。
[請求項14]
前記方法は、前記局所的な接触応力を表すデータに少なくとも部分的に基づいて、熱処理を変更するステップを含んでいる、
請求項13記載の方法。
[請求項15]
前記1つまたは複数のプロセッサ回路によって、接触点における局所的な接触応力を表すデータを求めるステップは、
前記1つまたは複数のプロセッサ回路によって、前記モデルを使用して、前記底面プロフィールの、前記支持構造との交差を識別するステップと、
前記1つまたは複数のプロセッサ回路によって、前記交差に基づいて、前記支持構造との接触点を求めるステップと、
を含んでいる、
請求項13記載の方法。
[請求項16]
前記1つまたは複数のプロセッサ回路によって、接触点における局所的な接触応力を表すデータを求めるステップは、前記1つまたは複数のプロセッサ回路によって、前記支持構造との接触速度を求めるステップを含んでいる、
請求項15記載の方法。
[請求項17]
前記1つまたは複数のプロセッサ回路によって、接触点における局所的な接触応力を表すデータを求めるステップは、前記接触点および前記接触速度に基づいて、前記局所的な接触応力を推定するステップを含んでいる、
請求項16記載の方法。
[請求項18]
前記方法は、前記モデルに少なくとも部分的に基づいて、前記基板にわたる応力分布を推定するステップを含んでいる、
請求項13記載の方法。
[請求項19]
前記応力分布を、前記基板に関連付けられた複数の温度測定値に少なくとも部分的に基づいて推定する、
請求項18記載の方法。
[請求項20]
前記支持構造は、支持ピンを含んでいる、
請求項13記載の方法。
Claims (8)
- ミリ秒アニールシステムにおける支持構造に由来する、基板における局所的な接触応力を求めるための方法において、
1つまたは複数のプロセッサ回路によって、所定の期間にわたり基板に関する複数の面法線推定値を取得するステップと、
前記1つまたは複数のプロセッサ回路によって、前記複数の面法線推定値に少なくとも部分的に基づいて、時間にわたる前記基板の底面プロフィールを規定するモデルを生成するステップと、
前記1つまたは複数のプロセッサ回路によって、前記モデルに少なくとも部分的に基づいて、前記基板と支持構造との間の接触点における局所的な接触応力を表すデータを求めるステップと、
を含んでいる方法。 - 前記方法は、前記局所的な接触応力を表すデータに少なくとも部分的に基づいて、前記ミリ秒アニールシステムにおける熱処理を変更するステップを含んでいる、
請求項1記載の方法。 - 前記1つまたは複数のプロセッサ回路によって、接触点における局所的な接触応力を表すデータを求めるステップは、
前記1つまたは複数のプロセッサ回路によって、前記モデルを使用して、前記底面プロフィールの、前記支持構造との交差を識別するステップと、
前記1つまたは複数のプロセッサ回路によって、前記交差に基づいて、前記支持構造との接触点を求めるステップと、
を含んでいる、
請求項1記載の方法。 - 前記1つまたは複数のプロセッサ回路によって、接触点における局所的な接触応力を表すデータを求めるステップは、前記1つまたは複数のプロセッサ回路によって、前記支持構造との接触速度を求めるステップを含んでいる、
請求項3記載の方法。 - 前記1つまたは複数のプロセッサ回路によって、接触点における局所的な接触応力を表すデータを求めるステップは、前記接触点および前記接触速度に基づいて、前記局所的な接触応力を推定するステップを含んでいる、
請求項4記載の方法。 - 前記方法は、前記モデルに少なくとも部分的に基づいて、前記基板にわたる応力分布を推定するステップを含んでいる、
請求項1記載の方法。 - 前記応力分布を、前記基板に関連付けられた複数の温度測定値に少なくとも部分的に基づいて推定する、
請求項6記載の方法。 - 前記支持構造は、支持ピンを含んでいる、
請求項1記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562272841P | 2015-12-30 | 2015-12-30 | |
| US62/272,841 | 2015-12-30 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018521892A Division JP6633199B2 (ja) | 2015-12-30 | 2016-12-14 | ミリ秒アニールシステムにおける基板支持 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020057801A JP2020057801A (ja) | 2020-04-09 |
| JP6873218B2 true JP6873218B2 (ja) | 2021-05-19 |
Family
ID=59225337
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018521892A Active JP6633199B2 (ja) | 2015-12-30 | 2016-12-14 | ミリ秒アニールシステムにおける基板支持 |
| JP2019223633A Active JP6873218B2 (ja) | 2015-12-30 | 2019-12-11 | ミリ秒アニールシステムにおける基板支持 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018521892A Active JP6633199B2 (ja) | 2015-12-30 | 2016-12-14 | ミリ秒アニールシステムにおける基板支持 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US10734262B2 (ja) |
| JP (2) | JP6633199B2 (ja) |
| KR (1) | KR102093825B1 (ja) |
| CN (1) | CN108352343B (ja) |
| TW (1) | TWI743074B (ja) |
| WO (1) | WO2017116709A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8822949B2 (en) | 2011-02-05 | 2014-09-02 | Ionsense Inc. | Apparatus and method for thermal assisted desorption ionization systems |
| US9337007B2 (en) | 2014-06-15 | 2016-05-10 | Ionsense, Inc. | Apparatus and method for generating chemical signatures using differential desorption |
| WO2017116687A1 (en) | 2015-12-30 | 2017-07-06 | Mattson Technology, Inc. | Substrate breakage detection in a thermal processing system |
| US20210043478A1 (en) * | 2019-08-07 | 2021-02-11 | Samsung Electronics Co., Ltd. | Pressure heating apparatus |
| CN114730694A (zh) | 2019-10-28 | 2022-07-08 | 埃昂森斯股份有限公司 | 脉动流大气实时电离 |
| US11913861B2 (en) | 2020-05-26 | 2024-02-27 | Bruker Scientific Llc | Electrostatic loading of powder samples for ionization |
| KR102518783B1 (ko) * | 2022-06-23 | 2023-04-06 | 큐알티 주식회사 | 적응적 변형이 가능한 빔 제어기, 이를 이용한 반도체 소자의 테스트 장치, 및 이를 이용한 반도체 소자의 테스트 방법 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08288372A (ja) | 1995-04-11 | 1996-11-01 | Nippon Pillar Packing Co Ltd | ウエハ支持プレート |
| JPH10233368A (ja) * | 1997-02-20 | 1998-09-02 | Toshiba Ceramics Co Ltd | 縦型ウエハボート |
| US6204203B1 (en) | 1998-10-14 | 2001-03-20 | Applied Materials, Inc. | Post deposition treatment of dielectric films for interface control |
| JP2001210704A (ja) | 2000-01-25 | 2001-08-03 | Sharp Corp | ウェハ吸着装置 |
| JP4055200B2 (ja) | 2002-03-15 | 2008-03-05 | 株式会社安川電機 | 基板搬送用フォーク |
| JP2004179566A (ja) | 2002-11-29 | 2004-06-24 | Nec Kansai Ltd | 縦型熱処理装置及び同装置における異常ウェーハ検出方法 |
| DE10393962B4 (de) * | 2002-12-20 | 2019-03-14 | Mattson Technology Inc. | Verfahren und Vorrichtung zum Stützen eines Werkstücks und zur Wärmebehandlung des Werkstücks |
| CN100352032C (zh) * | 2003-03-26 | 2007-11-28 | 信越半导体株式会社 | 热处理用晶片支持器具及热处理装置 |
| US7442415B2 (en) | 2003-04-11 | 2008-10-28 | Sharp Laboratories Of America, Inc. | Modulated temperature method of atomic layer deposition (ALD) of high dielectric constant films |
| WO2005059991A1 (en) * | 2003-12-19 | 2005-06-30 | Mattson Technology Canada Inc. | Apparatuses and methods for suppressing thermally induced motion of a workpiece |
| US8323754B2 (en) | 2004-05-21 | 2012-12-04 | Applied Materials, Inc. | Stabilization of high-k dielectric materials |
| US7363173B2 (en) * | 2004-06-01 | 2008-04-22 | California Institute Of Technology | Techniques for analyzing non-uniform curvatures and stresses in thin-film structures on substrates with non-local effects |
| US7966135B2 (en) * | 2004-06-01 | 2011-06-21 | California Institute Of Technology | Characterizing curvatures and stresses in thin-film structures on substrates having spatially non-uniform variations |
| US7790633B1 (en) | 2004-10-26 | 2010-09-07 | Novellus Systems, Inc. | Sequential deposition/anneal film densification method |
| WO2008058397A1 (en) * | 2006-11-15 | 2008-05-22 | Mattson Technology Canada, Inc. | Systems and methods for supporting a workpiece during heat-treating |
| KR100818842B1 (ko) * | 2006-12-27 | 2008-04-01 | 주식회사 실트론 | 웨이퍼의 열처리시 슬립을 방지할 수 있는 웨이퍼 지지 핀및 웨이퍼의 열처리 방법 |
| JP5718809B2 (ja) * | 2008-05-16 | 2015-05-13 | マトソン テクノロジー、インコーポレイテッド | 加工品の破壊を防止する方法および装置 |
| JP5083339B2 (ja) | 2010-02-04 | 2012-11-28 | 東京エレクトロン株式会社 | 基板搬送装置及び基板搬送方法並びに記憶媒体 |
| EP2463892B1 (de) * | 2010-12-13 | 2013-04-03 | EV Group E. Thallner GmbH | Einrichtung, Vorrichtung und Verfahren zur Ermittlung von Ausrichtungsfehlern |
| US8809175B2 (en) | 2011-07-15 | 2014-08-19 | Taiwan Semiconductor Manufacturing Company, Ltd. | Methods of anneal after deposition of gate layers |
| US9093468B2 (en) | 2013-03-13 | 2015-07-28 | Taiwan Semiconductor Manufacturing Company, Ltd. | Asymmetric cyclic depositon and etch process for epitaxial formation mechanisms of source and drain regions |
| US20150140838A1 (en) | 2013-11-19 | 2015-05-21 | Intermolecular Inc. | Two Step Deposition of High-k Gate Dielectric Materials |
| US9245768B2 (en) * | 2013-12-17 | 2016-01-26 | Applied Materials, Inc. | Method of improving substrate uniformity during rapid thermal processing |
-
2016
- 2016-12-14 KR KR1020187011208A patent/KR102093825B1/ko active IP Right Grant
- 2016-12-14 US US15/378,509 patent/US10734262B2/en active Active
- 2016-12-14 CN CN201680063372.6A patent/CN108352343B/zh active Active
- 2016-12-14 JP JP2018521892A patent/JP6633199B2/ja active Active
- 2016-12-14 WO PCT/US2016/066563 patent/WO2017116709A1/en active Application Filing
- 2016-12-21 TW TW105142451A patent/TWI743074B/zh active
-
2019
- 2019-12-11 JP JP2019223633A patent/JP6873218B2/ja active Active
-
2020
- 2020-07-27 US US16/939,143 patent/US11810802B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| TWI743074B (zh) | 2021-10-21 |
| CN108352343B (zh) | 2022-04-08 |
| CN108352343A (zh) | 2018-07-31 |
| JP2018536988A (ja) | 2018-12-13 |
| WO2017116709A1 (en) | 2017-07-06 |
| JP6633199B2 (ja) | 2020-01-22 |
| KR102093825B1 (ko) | 2020-03-27 |
| KR20180049119A (ko) | 2018-05-10 |
| US20200357671A1 (en) | 2020-11-12 |
| US10734262B2 (en) | 2020-08-04 |
| JP2020057801A (ja) | 2020-04-09 |
| TW201734488A (zh) | 2017-10-01 |
| US11810802B2 (en) | 2023-11-07 |
| US20170194178A1 (en) | 2017-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6873218B2 (ja) | ミリ秒アニールシステムにおける基板支持 | |
| US8724976B2 (en) | Use of infrared camera for real-time temperature monitoring and control | |
| US9070590B2 (en) | Workpiece breakage prevention method and apparatus | |
| US10388552B2 (en) | Substrate breakage detection in a thermal processing system | |
| TWI555711B (zh) | 玻璃模造系統及相關設備與方法 | |
| US20200402811A1 (en) | Features for Improving Process Uniformity in a Millisecond Anneal System | |
| CN105027275A (zh) | 具有用于外延处理的均匀性调整透镜的基座支撑杆 | |
| JP2013516644A (ja) | 形状安定化ミラーモジュールおよび反射素子の安定化方法 | |
| CN108227113A (zh) | 用于反射镜光学元件角度调整及像差补偿的装置以及方法 | |
| TWI766852B (zh) | 毫秒退火系統的氣流控制 | |
| KR20120077327A (ko) | 온도 측정 장치 | |
| KR20170118180A (ko) | 조절가능한 광원을 위한 장치 | |
| TW201729294A (zh) | 弧燈的電極端 | |
| JP2001044129A (ja) | 半導体ウエハの熱処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191217 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20200616 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210304 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210420 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6873218 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |