JP6825237B2 - 磁場計測装置、磁場計測装置の製造方法 - Google Patents
磁場計測装置、磁場計測装置の製造方法 Download PDFInfo
- Publication number
- JP6825237B2 JP6825237B2 JP2016117701A JP2016117701A JP6825237B2 JP 6825237 B2 JP6825237 B2 JP 6825237B2 JP 2016117701 A JP2016117701 A JP 2016117701A JP 2016117701 A JP2016117701 A JP 2016117701A JP 6825237 B2 JP6825237 B2 JP 6825237B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- cell
- magnetic field
- optical axis
- polarized light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/24—Arrangements or instruments for measuring magnetic variables involving magnetic resonance for measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/26—Arrangements or instruments for measuring magnetic variables involving magnetic resonance for measuring direction or magnitude of magnetic fields or magnetic flux using optical pumping
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/032—Measuring direction or magnitude of magnetic fields or magnetic flux using magneto-optic devices, e.g. Faraday or Cotton-Mouton effect
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/24—Arrangements or instruments for measuring magnetic variables involving magnetic resonance for measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/243—Spatial mapping of the polarizing magnetic field
Description
上記特許文献1には、第1の測定位置と第2の測定位置とを同一セル内に設ける例と、別々のセル内に設ける例とが示されている。
上記特許文献2には、複数のセルに対して第1軸方向の偏光成分を入射させるマルチチャンネル方式の例が示されている。
形態または適用例として実現することが可能である。
本発明の一態様の磁場計測装置は、直線偏光光を照射する光照射部と、アルカリ金属原子が封入され、磁場の受感方向に配置されており、照射された前記直線偏光光の偏光面の回転角を、前記磁場の影響を受けて変化させる第1セル及び第2セルと、第1基準面上に配置され、前記直線偏光光を前記第1セルに入射させる第1光学素子と、第2基準面上に配置され、前記直線偏光光を前記第2セルに入射させる第2光学素子と、を備え、前記第1基準面に対して照射された光の第1の反射光の光軸の向きと、前記第2基準面に対して照射された前記光と平行な光の第2の反射光の光軸の向きと、が同一方向となるように、前記第1基準面に対する前記第2基準面の位置が調整されており、該調整によって、前記第1セルに入射させる前記直線偏光光の向きと、前記第2セルに入射させる前記直線偏光光の向きと、が同一方向となるように調整されており、前記第1セル及び第2セルにおいて電気的に検出された前記直線偏光光の偏光面の回転角の変化から前記磁場を計測することを特徴とする。
この構成によれば、光軸検出部を備えることにより、第1セルに入射する直線偏光の光軸の向きと、第2セルに入射する直線偏光の光軸の向きとが同一方向であるか否かを検証可能なグラディオ型の磁場計測装置を提供できる。
この構成によれば、反射部材によりビーム光が確実に反射されるので、第1基準面に係るビーム光の第1の反射光の光軸の向きと、第2基準面に係るビーム光の第2の反射光の光軸の向きとを正確に検出することができる。
この構成によれば、外部磁場の影響を適正に排除して、磁場源から発する磁場を精度よく計測可能なグラディオ型且つマルチチャンネル型の磁場計測装置を提供することができる。
この構成によれば、1つの光照射部からグラディオ型且つマルチチャンネル型に配置された各セルに直線偏光を照射する場合に比べて、第1光照射部及び第2光照射部のそれぞれから射出される直線偏光の光量を抑えることができる。
この構成によれば、各セルに入射する直線偏光の入射方向に磁場源(計測対象)を必ずしも配置する必要がなくなることから、磁場源の配置における自由度が向上したグラディオ型の磁場計測装置を提供できる。
この方法によれば、第1基準面に係る光の第1の反射光の光軸の向きを基準として、第2基準面に係る上記光と平行な光の第2の反射光の光軸の向きが検出されるので、第1基準面に対する第2基準面の位置を容易に位置調整することができる。
<磁場計測装置>
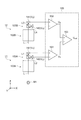
本実施形態の磁場計測装置について、図1を参照して説明する。図1は第1実施形態の磁場計測装置の構成を示すブロック図である。
本実施形態における偏光分離部103及び受光部104は、プローブ光の偏光面の回転角を検出する回転角検出部の一例である。
次に、磁場計測装置100を用いた磁場計測方法の原理について、図2〜図4を用いて説明する。図2は2つの磁気センサーの配置を示す概略図、図3及び図4は2つの磁気センサーにおけるレーザー光軸と外部磁場との関係を示す図である。以降、計測用磁気センサー11と参照用磁気センサー12とを、2つの磁気センサー11,12と呼ぶこともある。
本実施形態の磁場計測装置100の製造方法は、磁場の受感方向に第1セル102Aと第2セル102Bとを順に配置する配置工程(ステップS1)と、第1基準面108aに係るビーム光の第1の反射光としてのビーム光B1の光軸の向きと、第2基準面109aに係るビーム光の第2の反射光としてのビーム光B2の光軸の向きとを検出する光軸検出工程(ステップS2)と、光軸検出工程の結果に基づいて、第1基準面108aに対する第2基準面109aの位置、言い換えれば、第1支持部108に対する第2支持部109の位置を調整する位置調整工程(ステップS3)と、を備えている。以降、図5及び図6を参照して説明する。
(1)磁場計測装置100は、計測用磁気センサー11が組み込まれる第1支持部108に設けられた第1基準面108aと、参照用磁気センサー12が組み込まれる第2支持部109に設けられた第2基準面109aとを有している。また、受感方向(Z軸方向)において、第1基準面108aと第2基準面109aとにそれぞれビーム光を照射可能な光軸検出部としてのレーザーオートコリメーター170を備えている。また、第1支持部108に対する第2支持部109の位置を調整可能な位置調整機構を備えている。磁場計測装置100の製造方法において、光軸検出工程(ステップS2)では、レーザーオートコリメーター170により、第1基準面108aに係るビーム光の第1の反射光であるビーム光B1の光軸の向きと、第2基準面109aに係るビーム光の第2の反射光であるビーム光B2の光軸の向きとが検出される。位置調整工程(ステップS3)では、レーザーオートコリメーター170の検出結果に基づいて、位置調整機構により、ビーム光B1の光軸の向きとビーム光B2の光軸の向きとが合致するように、すなわち、第1セル102A及び第2セル102Bにおけるレーザー光軸L0の向き(レーザー光Lの入射方向)が同一方向となるように、第1支持部108に対する第2支持部109の位置が調整される。したがって、受感方向に配置された、計測用磁気センサー11と参照用磁気センサー12とにおいて、外部磁場EMのノイズが同水準で検知されるため、信号処理部105により第1受光部104Aの出力と第2受光部104Bの出力との差を演算することで、外部磁場EMの影響(ノイズ)を適正に排除することができる。すなわち、外部磁場EMの影響(ノイズ)を適正に排除して、計測用磁気センサー11により磁場源M1の磁場を精度よく計測可能なグラディオ型の磁場計測装置100及びその製造方法を提供することができる。
図7は第2実施形態の磁場計測装置の構成を示す概略図である。詳しくは、図7は上記第1実施形態における図5に対応するものである。第2実施形態の磁場計測装置において、上記第1実施形態の磁場計測装置100と同じ構成には同じ符号を付して詳細な説明は省略する。また、第2実施形態の磁場計測装置もまた、基本的に上記第1実施形態の図1及び図2に示したグラディオ型の構成を有するものである。
図8は第3実施形態の磁場計測装置の構成を示す概略図である。詳しくは、図8は上記第1実施形態における図5に対応するものである。第3実施形態の磁場計測装置において、上記第1実施形態の磁場計測装置100と同じ構成には同じ符号を付して詳細な説明は省略する。また、第3実施形態の磁場計測装置もまた、基本的に上記第1実施形態の図1及び図2に示したグラディオ型の構成を有するものである。
図9は第4実施形態の磁場計測装置におけるセルの配置を示す概略平面図、図10は第4実施形態の磁場計測装置の構成を示す概略図である。詳しくは、図10は上記第1実施形態における図5に対応するものである。第4実施形態の磁場計測装置において、上記第1実施形態の磁場計測装置100と同じ構成には同じ符号を付して詳細な説明は省略する。第4実施形態の磁場計測装置もまた、基本的に上記第1実施形態の図1及び図2に示したグラディオ型の構成を有するものであるが、計測用磁気センサー及び参照用磁気センサーのそれぞれをマルチチャンネル型とした磁場計測装置である。
図9に示すように、本実施形態の磁場計測装置400は、計測用磁気センサー411を有する。計測用磁気センサー411は、複数のセルからなるセルアレイ402Aを含んで構成されたマルチチャンネル型となっている。磁場計測装置400は、セルアレイ402Aの各セルにレーザー光Lを入射させる第1光学素子421を有している。また、磁場計測装置400は、計測用磁気センサー411が組み込まれる第1支持部408を有している。

Claims (11)
- 直線偏光光を照射する光照射部と、
アルカリ金属原子が封入され、磁場の受感方向に配置されており、照射された前記直線偏光光の偏光面の回転角を、前記磁場の影響を受けて変化させる第1セル及び第2セルと、
第1基準面上に配置され、前記直線偏光光を前記第1セルに入射させる第1光学素子と、
第2基準面上に配置され、前記直線偏光光を前記第2セルに入射させる第2光学素子と、
を備え、
前記第1基準面に対して照射された光の第1の反射光の光軸の向きと、前記第2基準面に対して照射された前記光と平行な光の第2の反射光の光軸の向きと、が同一方向となるように、前記第1基準面に対する前記第2基準面の位置が調整されており、
該調整によって、前記第1セルに入射させる前記直線偏光光の向きと、前記第2セルに入射させる前記直線偏光光の向きと、が同一方向となるように調整されており、
前記第1セル及び第2セルにおいて電気的に検出された前記直線偏光光の偏光面の回転角の変化から前記磁場を計測することを特徴とする磁場計測装置。 - 前記第1の反射光の光軸の向きと、前記第1セルに入射させる前記直線偏光光の向きと同一方向であり、かつ、前記第2の反射光の光軸の向きと、前記第2セルに入射させる前記直線偏光光の向きと同一方向であることを特徴とする請求項1に記載の磁場計測装置。
- 前記第1基準面に対して照射される前記光、及び前記第2基準面に対して照射される前記光と平行な光、としてのビーム光を照射可能であって、前記第1基準面に対して照射された前記ビーム光の前記第1の反射光の光軸の向きと、前記第2基準面に対して照射された前記ビーム光の前記第2の反射光の光軸の向きとを検出可能な光軸検出部を備えたことを特徴とする請求項1または2に記載の磁場計測装置。
- 前記第1基準面には、前記第1基準面に対して照射される前記光を反射させる反射部材が設けられ、
前記第2基準面には、前記第2基準面に対して照射される前記光と平行な光を反射させる反射部材が設けられている、
ことを特徴とする請求項1乃至3のいずれか一項に記載の磁場計測装置。 - 前記アルカリ金属原子が封入され、前記第1セルに対して前記受感方向と直交する方向に配置されており、照射された前記直線偏光光の偏光面の回転角を、前記磁場の影響を受けて変化させる第3セルと、
前記アルカリ金属原子が封入され、前記第2セルに対して前記受感方向と直交する方向に配置されており、照射された前記直線偏光光の偏光面の回転角を、前記磁場の影響を受けて変化させる第4セルと、
を備えたことを特徴とする請求項1乃至4のいずれか一項に記載の磁場計測装置。 - 前記光照射部は、前記第1セルと前記第3セルとに、前記直線偏光光を照射する第1光照射部と、前記第2セルと前記第4セルとに、前記直線偏光光を照射する第2光照射部とを含むことを特徴とする請求項5に記載の磁場計測装置。
- 磁場の前記受感方向と前記第1セル及び前記第2セルにおける前記直線偏光光の入射方向とが交差していることを特徴とする請求項1乃至6のいずれか一項に記載の磁場計測装置。
- 直線偏光光を照射する光照射部と、
アルカリ金属原子が封入された第1セル及び第2セルと、
第1基準面に配置され、前記直線偏光光を前記第1セルに入射させる第1光学素子と、
第2基準面に配置され、前記直線偏光光を前記第2セルに入射させる第2光学素子と、
を有する磁場計測装置の製造方法であって、
磁場の受感方向に前記第1セルと前記第2セルとを配置する配置工程と、
前記第1基準面に対して照射された光の第1の反射光の光軸の向きと、前記第2基準面に対して照射された前記光と平行な光の第2の反射光の光軸の向きと、を検出する光軸検出工程と、
前記光軸検出工程の結果に基づいて、前記第1の反射光の光軸の向きと、前記第2の反射光の光軸の向きと、が同一方向となるように、前記第1基準面に対する前記第2基準面の位置を調整する位置調整工程と、
を備え、
前記位置調整工程によって、前記第1セルに入射させる前記直線偏光光と、前記第2セルに入射させる前記直線偏光光と、が同一方向となるように調整する
ことを特徴とする磁場計測装置の製造方法。 - 前記光軸検出工程は、前記第1の反射光の光軸の向きを検出する第1工程と、
前記第2の反射光の光軸の向きを検出する第2工程と、を含み、
前記第2工程は、前記配置工程の後に実施され、前記第1工程で検出された前記第1の反射光の光軸の向きを基準として、前記第2の反射光の光軸の向きを検出することを特徴とする請求項8に記載の磁場計測装置の製造方法。 - 前記第1の反射光の光軸の向きと、前記第1セルに入射させる前記直線偏光光の向きと同一方向であり、かつ、前記第2の反射光の光軸の向きと、前記第2セルに入射させる前記直線偏光光の向きと同一方向であることを特徴とする請求項8または9に記載の磁場計測装置の製造方法。
- 計測用磁気センサーと、
参照用磁気センサーと、
を含み、
前記計測用磁気センサーは、
第1直線偏光光を照射する第1光照射部と、
アルカリ金属原子が封入され、照射された前記第1直線偏光光の偏光面を、磁場の影響を受けて回転させる第1セルと、
前記第1直線偏光光を第1方向に前記第1セルに入射させる第1光学素子と、
を含み、
前記参照用磁気センサーは、
第2直線偏光光を照射する第2光照射部と、
アルカリ金属原子が封入され、照射された前記第2直線偏光光の偏光面を、磁場の影響を受けて回転させる第2セルと、
前記第2直線偏光光を第2方向に前記第2セルに入射させる第2光学素子と、
を含み、
前記第2方向が前記第1方向と同軸であり、
前記第1セルにおいて電気的に検出された前記第1直線偏光光の偏光面の回転の変化、及び第2セルにおいて電気的に検出された前記第2直線偏光光の偏光面の回転の変化、から前記磁場を計測することを特徴とする磁場計測装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016117701A JP6825237B2 (ja) | 2016-06-14 | 2016-06-14 | 磁場計測装置、磁場計測装置の製造方法 |
| US15/614,961 US10036786B2 (en) | 2016-06-14 | 2017-06-06 | Magnetic field measuring apparatus and manufacturing method of magnetic field measuring apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016117701A JP6825237B2 (ja) | 2016-06-14 | 2016-06-14 | 磁場計測装置、磁場計測装置の製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017223487A JP2017223487A (ja) | 2017-12-21 |
| JP2017223487A5 JP2017223487A5 (ja) | 2019-06-20 |
| JP6825237B2 true JP6825237B2 (ja) | 2021-02-03 |
Family
ID=60572550
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016117701A Active JP6825237B2 (ja) | 2016-06-14 | 2016-06-14 | 磁場計測装置、磁場計測装置の製造方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10036786B2 (ja) |
| JP (1) | JP6825237B2 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6825241B2 (ja) * | 2016-06-21 | 2021-02-03 | セイコーエプソン株式会社 | 磁場計測装置、磁場計測装置の製造方法 |
| US10976386B2 (en) | 2018-07-17 | 2021-04-13 | Hi Llc | Magnetic field measurement system and method of using variable dynamic range optical magnetometers |
| US11262420B2 (en) | 2018-08-17 | 2022-03-01 | Hi Llc | Integrated gas cell and optical components for atomic magnetometry and methods for making and using |
| WO2020040882A1 (en) | 2018-08-20 | 2020-02-27 | Hi Llc | Magnetic field shaping components for magnetic field measurement systems and methods for making and using |
| US10627460B2 (en) | 2018-08-28 | 2020-04-21 | Hi Llc | Systems and methods including multi-mode operation of optically pumped magnetometer(s) |
| WO2020060652A1 (en) | 2018-09-18 | 2020-03-26 | Hi Llc | Dynamic magnetic shielding and beamforming using ferrofluid for compact magnetoencephalography (meg) |
| CN111289924A (zh) * | 2018-12-10 | 2020-06-16 | 中科知影(北京)科技有限公司 | 多通道原子磁探测器 |
| US11294008B2 (en) | 2019-01-25 | 2022-04-05 | Hi Llc | Magnetic field measurement system with amplitude-selective magnetic shield |
| WO2020167450A1 (en) | 2019-02-12 | 2020-08-20 | Hi Llc | Neural feedback loop filters for enhanced dynamic range magnetoencephalography (meg) systems and methods |
| CA3130157A1 (en) | 2019-03-29 | 2020-10-08 | Hi Llc | Integrated magnetometer arrays for magnetoencephalography (meg) detection systems and methods |
| US11269027B2 (en) | 2019-04-23 | 2022-03-08 | Hi Llc | Compact optically pumped magnetometers with pump and probe configuration and systems and methods |
| US11839474B2 (en) | 2019-05-31 | 2023-12-12 | Hi Llc | Magnetoencephalography (MEG) phantoms for simulating neural activity |
| US11131729B2 (en) | 2019-06-21 | 2021-09-28 | Hi Llc | Systems and methods with angled input beams for an optically pumped magnetometer |
| US11415641B2 (en) | 2019-07-12 | 2022-08-16 | Hi Llc | Detachable arrangement for on-scalp magnetoencephalography (MEG) calibration |
| WO2021026143A1 (en) * | 2019-08-06 | 2021-02-11 | Hi Llc | Systems and methods having an optical magnetometer array with beam splitters |
| US11747413B2 (en) | 2019-09-03 | 2023-09-05 | Hi Llc | Methods and systems for fast field zeroing for magnetoencephalography (MEG) |
| WO2021091867A1 (en) | 2019-11-08 | 2021-05-14 | Hi Llc | Methods and systems for homogenous optically-pumped vapor cell array assembly from discrete vapor cells |
| US11766217B2 (en) | 2020-05-28 | 2023-09-26 | Hi Llc | Systems and methods for multimodal pose and motion tracking for magnetic field measurement or recording systems |
| US11779251B2 (en) | 2020-05-28 | 2023-10-10 | Hi Llc | Systems and methods for recording neural activity |
| US11779250B2 (en) | 2020-05-28 | 2023-10-10 | Hi Llc | Systems and methods for recording biomagnetic fields of the human heart |
| US11428756B2 (en) | 2020-05-28 | 2022-08-30 | Hi Llc | Magnetic field measurement or recording systems with validation using optical tracking data |
| US11774526B2 (en) | 2020-09-10 | 2023-10-03 | X Development Llc | Magnetometry based on electron spin defects |
| US11604237B2 (en) | 2021-01-08 | 2023-03-14 | Hi Llc | Devices, systems, and methods with optical pumping magnetometers for three-axis magnetic field sensing |
| US11803018B2 (en) | 2021-01-12 | 2023-10-31 | Hi Llc | Devices, systems, and methods with a piezoelectric-driven light intensity modulator |
| EP4160239A1 (en) * | 2021-10-01 | 2023-04-05 | Fundació Institut de Ciències Fotòniques | A cell for an optically-pumped atomic magnetic gradiometer, an optically-pumped atomic magnetic gradiometer, and a system comprising the gradiometer and a microscopy system |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4327327A (en) * | 1980-06-05 | 1982-04-27 | The Singer Company | All-angle gradient magnetometer |
| JP5178187B2 (ja) | 2007-12-28 | 2013-04-10 | キヤノン株式会社 | 原子磁気センサ、及び磁気センシング方法 |
| JP5640335B2 (ja) * | 2009-06-26 | 2014-12-17 | セイコーエプソン株式会社 | 磁気センサー |
| JP5446731B2 (ja) * | 2009-10-29 | 2014-03-19 | セイコーエプソン株式会社 | 磁場測定装置 |
| JP2011137687A (ja) * | 2009-12-28 | 2011-07-14 | Seiko Epson Corp | 磁気計測装置 |
| JP5434735B2 (ja) * | 2010-03-25 | 2014-03-05 | セイコーエプソン株式会社 | セルユニット、セルユニット群および磁場測定装置 |
| JP5799553B2 (ja) * | 2011-04-01 | 2015-10-28 | セイコーエプソン株式会社 | 磁場測定装置、磁場測定システムおよび磁場測定方法 |
| JP2014119376A (ja) | 2012-12-18 | 2014-06-30 | Seiko Epson Corp | 照射装置および計測装置 |
| JP6459167B2 (ja) * | 2013-11-27 | 2019-01-30 | セイコーエプソン株式会社 | 磁場測定装置および磁場測定方法 |
| JP6825241B2 (ja) * | 2016-06-21 | 2021-02-03 | セイコーエプソン株式会社 | 磁場計測装置、磁場計測装置の製造方法 |
-
2016
- 2016-06-14 JP JP2016117701A patent/JP6825237B2/ja active Active
-
2017
- 2017-06-06 US US15/614,961 patent/US10036786B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017223487A (ja) | 2017-12-21 |
| US20170356969A1 (en) | 2017-12-14 |
| US10036786B2 (en) | 2018-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6825237B2 (ja) | 磁場計測装置、磁場計測装置の製造方法 | |
| JP6825241B2 (ja) | 磁場計測装置、磁場計測装置の製造方法 | |
| US7864336B2 (en) | Compact Littrow encoder | |
| US5469259A (en) | Inspection interferometer with scanning autofocus, and phase angle control features | |
| JP6320267B2 (ja) | 光学式位置測定装置 | |
| KR102139988B1 (ko) | 수직입사 타원계측기 및 이를 이용한 시편의 광물성 측정 방법 | |
| CN111721235A (zh) | 一种光电式边缘检测系统及其检测方法 | |
| JP5434735B2 (ja) | セルユニット、セルユニット群および磁場測定装置 | |
| JP2007057324A (ja) | 光ファイバ型計測システム | |
| JP5874808B2 (ja) | 磁場測定装置 | |
| JP2002286448A (ja) | 傾斜検出装置 | |
| JP5747556B2 (ja) | 磁場測定装置およびセルアレイ | |
| CN101561317B (zh) | 一种高精度自动测量目标对传输光束偏振态影响的系统 | |
| JP6089644B2 (ja) | 光素子接続方法及び光素子接続装置 | |
| JP5928998B2 (ja) | 磁場計測装置 | |
| JP2003097924A (ja) | 形状測定装置および測定方法 | |
| JPH09196619A (ja) | 微小変位量の測定方法及び装置 | |
| JPH01142401A (ja) | 光学式変位測定装置 | |
| JPH05158084A (ja) | 線形及び非線形光学感受率測定装置 | |
| JP6202044B2 (ja) | 磁場測定装置 | |
| JPH03235006A (ja) | 移動体の直進性測定方法及び装置 | |
| JP5673791B2 (ja) | セルユニット、セルユニット群および磁場測定装置 | |
| JPH0252827B2 (ja) | ||
| CN113884466A (zh) | 基于弱测量的表面折射率成像传感器及其测量方法 | |
| JP3796660B2 (ja) | 全反射減衰を利用した測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180907 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181119 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190514 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190514 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200507 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200702 |
|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20200803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6825237 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |