JP6810544B2 - 操作装置 - Google Patents
操作装置 Download PDFInfo
- Publication number
- JP6810544B2 JP6810544B2 JP2016134280A JP2016134280A JP6810544B2 JP 6810544 B2 JP6810544 B2 JP 6810544B2 JP 2016134280 A JP2016134280 A JP 2016134280A JP 2016134280 A JP2016134280 A JP 2016134280A JP 6810544 B2 JP6810544 B2 JP 6810544B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- rotating
- pressing
- members
- pressing member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






























Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/20—Input arrangements for video game devices
- A63F13/24—Constructional details thereof, e.g. game controllers with detachable joystick handles
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/25—Output arrangements for video game devices
- A63F13/28—Output arrangements for video game devices responding to control signals received from the game device for affecting ambient conditions, e.g. for vibrating players' seats, activating scent dispensers or affecting temperature or light
- A63F13/285—Generating tactile feedback signals via the game input device, e.g. force feedback
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Human Computer Interaction (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- User Interface Of Digital Computer (AREA)
- Position Input By Displaying (AREA)
Description
この特許文献1に記載のコントローラー(操作装置)は、ユーザーの左右の手で把持される左側把持部及び右側把持部と、当該コントローラーの正面に配設された方向ボタン及び操作ボタンとを有する。
また、本発明の第2態様に係る操作装置は、ユーザーの片手に装着される操作装置であって、前記片手の掌を押圧する押圧機構を備えることを特徴とする。
以下、本発明の第1実施形態について、図面に基づいて説明する。
[情報処理システムの概略構成]
図1は、本実施形態に係る情報処理システムSYを示す模式図である。なお、図1では、2つの操作装置1(1L,1R)を図示している。
本実施形態に係る情報処理システムSYは、図1に示すように、ゲーム機やPC(Personal Computer)等の情報処理装置PDと、当該情報処理装置PDによる処理結果を表示する画像表示装置DSと、当該情報処理装置PDと通信して、ユーザーUSによる操作に応じた操作情報を送信する少なくとも1つの操作装置1と、を備える。
このような情報処理システムSYにおいて、情報処理装置PDと通信する操作装置1は、複数でもよく、1人のユーザーUSが1つ或いは複数の操作装置1を利用してもよく、複数のユーザーUSのそれぞれが1つ或いは複数の操作装置1を利用してもよい。
操作装置1(1L,1R)は、ユーザーUSの片手に装着されて使用される。具体的に、操作装置1Lは、ユーザーUSの左手LHに装着され、操作装置1Rは、ユーザーUSの右手RHに装着される。そして、操作装置1L,1Rは、左手LH及び右手RHの掌及び指によって、それぞれ把持可能である。そして、操作装置1は、ユーザーUSの手や指の動き等を検出し、検出結果に応じた操作情報を情報処理装置PDに送信する他、当該情報処理装置PDから受信された制御情報に応じた処理を実行する。
このような操作装置1は、詳しくは後述するが、当該制御情報に応じて外形が拡縮される拡縮装置を備え、当該拡縮装置が、操作装置1が装着された片手の掌や指を押圧することにより、ユーザーUSに触覚を付与することを特徴の1つとしている。具体的に、本実施形態では、操作装置1は、当該拡縮装置が備える押圧部材により構成される円弧の径を変化(拡縮)させることにより、ゲーム等における物体の形状変化に応じた操作装置1の形状変化による刺激をユーザーUSに付与できること、及び、ユーザーUSによる把持(握り)操作に対して上記円弧の径を変化させることにより、当該操作に対する反力を発生させてユーザーUSに力覚を提示できることを、それぞれ特徴の1つとしている。
なお、操作装置1Lと操作装置1Rとは、形状が左右対称である以外は同様の構成であるので、以下の説明では、操作装置1Rについて説明し、操作装置1Lについての説明を省略する。
操作装置1Rは、図2に示すように、装置本体2と、当該装置本体2から延出する装着部材としてのバンド9と、を備える。そして、操作装置1Rは、図3に示すように、バンド9に親指RH1以外の指RH2〜RH5を挿入し、右手RHの掌RH6に装置本体2が接触するようにして、当該右手RHに装着される。この状態で、操作装置1Rに対してユーザーUSが所定の操作を実施すると、後述する巻取部WP(図4参照)によってバンド9が巻き取られ、これにより、装置本体2が掌RH6に密着する。このような状態では、各指RH1〜RH5が装置本体2から離された場合でも、操作装置1Rが右手RHから脱離されることが抑制されている。
図4は、装置本体2の構成を示すブロック図である。
装置本体2は、図4に示すように、外装を構成する筐体3と、当該筐体3に設けられる操作検出部4、発光部5L,5R、スピーカーSP、振動発生部VB、巻取部WP、反力発生部61〜64及び制御部7と、を備える。これらのうち、筐体3については、後に詳述する。
プッシュキーPK1〜PK5のそれぞれは、親指RH1等による押圧操作を検出する。
トリガーキーTKは、人差し指RH2等による押圧操作を検出する。
光センサーLS1〜LS5は、それぞれ対応する指RH1〜RH5の位置を検出する。これら光センサーLS1〜LS5は、それぞれ、検出光を外部に向けて出射し、検出対象の指にて反射された検出光の光量を、制御部7に出力する。この光量に基づいて、制御部7が、当該検出対象の指の位置を解析及び特定する。
加速度センサーAS及びジャイロセンサーGSは、それぞれ、操作装置1Rに作用する加速度及び角速度を検出し、これにより、当該操作装置1Rが装着された右手RHの動きに応じた加速度及び角速度を検出する。
マイクMCは、検出された音声に応じた音声信号を制御部7に出力する。
スピーカーSPは、制御部7から入力される音声信号に応じた音声を出力する。
振動発生部VBは、振動を発生するモーター等のアクチュエーターを有し、制御部7による制御の下で駆動して振動を発生させる。このような振動発生部VBは、筐体3内の異なる箇所に複数設けてもよい。
反力発生部61は、トリガーキーTKの没入に対する反力を発生させる。
反力発生部62〜64は、それぞれ本発明の押圧機構に相当する。これら反力発生部62〜64は、操作装置1Rが右手RHに装着された際の中指RH3、薬指RH4及び小指RH5の位置に応じて設けられ、これら指RH3〜RH5及び掌RH6に押圧力を作用させる。これら反力発生部62〜64の構成については、後に詳述する。
制御部7は、演算処理回路等の回路素子を有し、装置本体2の動作を制御する。この制御部7は、操作判定部71、通信部72及び動作制御部73を有する。
操作判定部71は、操作検出部4から入力される操作信号に基づいて、ユーザーUSによる入力操作を判定する。
通信部72は、上記情報処理装置PDと通信して、当該情報処理装置PDとの間で各種情報(操作情報及び制御情報)を送受信する通信モジュールである。本実施形態では、通信部72は、IEEE802.11(例えばIEEE802.11a/b/g/n/ac)等の無線LAN通信規格に準拠した通信方式、IEEE802.15(例えばBluetooth(登録商標)やZigbee)等の短距離無線通信規格に準拠した通信方式、及び、独自の通信プロトコルに準拠した通信方式の少なくともいずれかにより情報処理装置PDと通信する。この通信部72は、例えば、操作判定部71による判定結果に応じた操作情報を、当該情報処理装置PDに送信する。なお、通信部72は、操作情報の送信元が操作装置1Rであることを示す種別情報を含めて、当該操作情報を情報処理装置PDに送信する。このため、操作装置1Lから送信される操作情報には、当該操作情報の送信元が操作装置1Lであることを示す種別情報が含まれる。
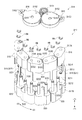
図5は、装置本体2(筐体3)を示す右側面図であり、図6は、装置本体2(筐体3)を右方背面側下方から見た斜視図である。
筐体3は、合成樹脂により形成された筐体である。この筐体3は、図2、図5及び図6に示すように、上側筐体部31及び下側筐体部32を有する。また、筐体3における右側面3Rには、上記バンド9の一端及び他端が挿入される一対の矩形孔部3R1,3R2が形成されている。
なお、以下の説明では、筐体3の正面3Aから背面3Bに向かう奥行方向を+Z方向とし、当該+Z方向に直交し、かつ、筐体3の底面3Dから天面3Cに向かう高さ方向を+Y方向とする。更に、これら+Y方向及び+Z方向のそれぞれに直交し、かつ、筐体3の右側面3Rから左側面3Lに向かう左右方向を+X方向とする。換言すると、操作装置1Rを装着した右手RHの各指を伸ばした場合に、各指RH2〜RH5が伸びる方向を+Z方向とし、+Z方向に直交し、かつ、当該親指RH1が伸びる方向を+Y方向とし、これら+Z方向及び+Y方向に直交し、かつ、各指RH2〜RH5を曲げた場合に当該各指RH2〜RH5が伸びる方向を+X方向とする。そして、+Z方向とは反対方向を−Z方向とする。−X方向及び−Y方向においても同様である。
上側筐体部31は、筐体3における+Y方向側に位置し、+Y方向側及び+Z方向側に延出した形状を有する。この上側筐体部31には、操作装置1Rの使用時に親指RH1及び人差し指RH2が配置される。
このような上側筐体部31は、正面3Aに位置する第1操作部311と、背面3Bに位置する第2操作部312と、を有する。なお、上側筐体部31における+Y方向側の端部には、上記発光部5L,5Rが配置されている。
トリガーキーTKは、第2操作部312に対して+Y方向側に設定された+X方向に沿う回動軸を中心として回動することによって突没される。
光センサーLS2は、トリガーキーTKの略中央に形成された検出窓を介して、検出光を外部に出射し、検出対象である人差し指RH2にて反射されて入射される検出光の光量を制御部7に出力する。
反力発生部61は、上記のように、トリガーキーTKに対して、第2操作部312に対する没入方向とは反対方向への反力を発生させる。
下側筐体部32は、略円筒状に形成されている。この下側筐体部32は、操作装置1Rが装着される右手RHの掌RH6及び指RH3〜RH5に応じた部位であり、親指RH1の付け根と、当該各指RH3〜RH5とによって把持可能である。このような下側筐体部32内には、反力発生部62〜64及び光センサーLS3〜LS5が配置されている。
具体的に、反力発生部62〜64は、中指RH3、薬指RH4及び小指RH5に応じた位置に設けられている。そして、中指RH3の位置を検出する光センサーLS3は、反力発生部62,63の間に配置され、薬指RH4の位置を検出する光センサーLS4は、反力発生部63,64の間に配置され、小指RH5の位置を検出する光センサーLS5は、反力発生部64に対する−Y方向側の位置に配置される。
図7及び図8は、拡縮装置D1を示す斜視図である。具体的に、図7は、縮径状態の拡縮装置D1を示す斜視図であり、図8は、拡径状態の拡縮装置D1を示す斜視図である。また、図9は、拡径状態の拡縮装置D1を下側から見た斜視図である。
押圧機構としての反力発生部62〜64は、それぞれ、図7及び図8に示す拡縮装置D1を備える。これら拡縮装置D1は、当該拡縮装置D1を構成する押圧部材D17により形成される円弧の径を拡縮することにより、掌RH6及び対応する指RH3〜RH5を押圧したり、或いは、これら指RH3〜RH5の握る動作に対する反力を発生させたりして、ユーザーUSに触覚を付与する。なお、このような拡縮装置D1は、外部に露出していてもよく、下側筐体部32を構成し、かつ、伸縮可能な材料により形成されたカバー部材によって覆われていてもよい。
このような拡縮装置D1は、上部カバーD11及び下部カバーD12と、これらの間にそれぞれ配置される回動装置D13、移動部材D14(図10参照)及び押圧部材D17と、を備える。
上部カバーD11及び下部カバーD12は、それぞれ上方及び下方から見て円形状に形成されている。これらカバーD11,D12は、回動装置D13に取り付けられ、回動装置D13及び移動部材D14を保護する。この他、各カバーD11,D12には、図示を省略するが、例えば加速度センサー及びジャイロセンサー等のセンサーを収容するスペースが内部に設けられており、拡縮装置D1を操作装置1以外の電子機器に用いる場合の利便性が考慮されている。なお、上記加速度センサーAS及びジャイロセンサーGSを、当該スペースに設けてもよい。一方、拡縮装置D1は、筐体3(下側筐体部32)内に配置されるので、これら上部カバーD11及び下部カバーD12は無くてもよい。
図10及び図11は、下部カバーD12を取り外した拡縮装置D1をそれぞれ下側から見た図である。これらのうち、図10は、縮径状態の拡縮装置D1を示し、図11は、拡径状態の拡縮装置D1を示している。
回動装置D13は、押圧部材D17を変位させて、当該押圧部材D17によって形成される円弧の径を拡縮させる駆動力を発生させる。この回動装置D13は、円弧状に構成された押圧部材D17の内側(円弧の中心側)に配置されている。このような回動装置D13は、当該回動装置D13の駆動によって回転する回転部としてのスピンドルギアD131を有し、当該スピンドルギアD131は、回動装置D13における下方側に突出して設けられている。そして、スピンドルギアD131には、移動部材D14が噛合している。
このような回動装置D13として、本実施形態では、サーボモーターが採用されているが、スピンドルギアD131の回動方向を適宜変更できれば、他のモーター等の駆動装置であってもよい。
移動部材D14は、スピンドルギアD131の回動によって移動して、上記円弧の径を拡縮させるものである。この移動部材D14は、第1回動部材D15及び第2回動部材D16を有し、これらは、回動装置D13に固定された固定部材D132によって回動可能に支持されている。
第1回動部材D15は、当該固定部材D132のボスD133が挿入されて回動中心部となる孔部D151と、外周に形成された噛合部D152と、を有するギアである。この第1回動部材D15は、噛合部D152にて噛合するスピンドルギアD131の回動に伴って、当該スピンドルギアD131の回動軸と平行な回動軸を中心として回動する。このような第1回動部材D15は、押圧部材D17の一端側終端部を構成する連結部材D21の軸部D214が挿入されて、当該連結部材D21と連結される連結部としての孔部D153を更に有する。
なお、第2回動部材D16は、押圧部材D17において第1回動部材D15と連結される一端側終端部(連結部材D21)とは反対側の他端側終端部(連結部材D22)と連結されて、当該他端側終端部を支持することから、本発明の支持部材に相当する。
図12及び図13は、押圧部材D17を示す分解斜視図である。これらのうち、図12は、押圧部材D17によって形成される円弧の外側から見た押圧部材D17の分解斜視図であり、図13は、当該円弧の内側から見た押圧部材D17の分解斜視図である。
押圧部材D17は、図12及び図13において上段に位置する複数の歯車部材D18と、下段に位置する複数の連結部材D19と、を有し、これらによって、円弧状をなし、かつ、湾曲可能に構成されている。具体的に、押圧部材D17は、図12及び図13において上段に位置し、複数の歯車部材D18によって構成される歯車列D17Aと、下段に位置し、複数の連結部材D19によって構成される歯車列D17Bと、を有し、これら歯車列D17A,D17Bが互いに組み合わされて構成されている。
なお、以下の説明では、第1回動部材D15から押圧部材D17の外周に沿って第2回動部材D16に向かう方向を+S1方向とし、当該+S1方向の反対方向を−S1方向とする。また、歯車部材D18から連結部材D19に向かう方向(図12及び図13における下方)を+T1方向とし、当該+T1方向の反対方向を−T1方向とする。なお、拡縮装置D1が操作装置1に取り付けられた場合、+T1方向は、上記+Y方向に沿う方向であり、−T1方向は、上記−Y方向に沿う方向である。しかしながら、これに限らず、+T1方向が−Y方向側を向き、−T1方向が+Y方向側を向くように、拡縮装置D1が操作装置1に適用されてもよい。
図14は、歯車部材D18を示す斜視図である。
複数の歯車部材D18は、それぞれ同じ形状に形成されている。これら歯車部材D18は、直列に噛合して円弧状に配列されており、本実施形態では、5つ設けられている。このような歯車部材D18は、図14に示すように、孔部D181,D182、噛合部D183,D184及び突出部D185を有する。
孔部D181は、−S1方向側に位置する。この孔部D181は、歯車部材D18を支持する2つの連結部材D19のうち−S1方向側に位置する連結部材D19の軸部D202(図15参照)が挿入されて、当該連結部材D19に対する回動中心部となる。
孔部D182は、+S1方向側に位置する。この孔部D182は、歯車部材D18を支持する2つの連結部材D19のうち+S1方向側に位置する連結部材D19の軸部D201(図15参照)が挿入されて、当該連結部材D19に対する回動中心部となる。
すなわち、孔部D181,D182のうち、一方は、連結部材D19に対する歯車部材D18の回動軸を構成する第1回動中心部であり、他方は、他の連結部材D19に対する歯車部材D18の回動軸を構成する第2回動中心部である。
すなわち、図12に示すように、これら噛合部D183,D184を有する歯車部材D18を第1歯車部材D18Aとし、当該歯車部材D18に対して−S1方向側に位置する歯車部材D18を第2歯車部材D18Bとし、+S1方向側に位置する歯車部材D18を第3歯車部材D18Cとした場合、第1歯車部材D18Aの噛合部D183は、第2歯車部材D18Bと噛合する第1噛合部に相当し、第1歯車部材D18Aの噛合部D184は、第3歯車部材D18Cと噛合する第2噛合部に相当する。このように、噛合部D183,D184が他の歯車部材D18と噛合することにより、それぞれの歯車部材D18は直列に噛合する。
なお、押圧部材D17において最も−S1方向側に位置する歯車部材D18の噛合部D183は利用されないので、当該歯車部材D18の噛合部D183は無くてもよい。同様に、最も+S1方向側に位置する歯車部材D18の噛合部D184は利用されないので、当該歯車部材D18の噛合部D184は無くてもよい。
複数の連結部材D19は、図7〜図9に示すように、上記複数の歯車部材D18を連結する他、図12及び図13に示すように、互いに直列に噛合して歯車列D17Bを構成する。これら連結部材D19は、複数の連結部材D20と、当該複数の連結部材D20のうち最も−S1方向側に位置する連結部材D20と噛合する連結部材D21と、最も+S1方向側に位置する連結部材D20と噛合する連結部材D22と、を有する。すなわち、連結部材D21は、押圧部材D17において−S1方向側の端部に位置し、連結部材D22は、+S1方向側の端部に位置している。そして、連結部材D20がそれぞれ2つの歯車部材D18を支持するとともに、連結部材D21,D22のそれぞれが1つの歯車部材D18を支持して、上記複数の歯車部材D18を連結する。
連結部材D20は、本実施形態では4つ設けられている。これら連結部材D20は、図15に示すように、孔部D181,D182に代えて軸部D201,D202を有する他は、上下を逆にした上記歯車部材D18と同様の形状を有する。具体的に、連結部材D20は、連結部材側軸部としての軸部D201,D202と、噛合部D203,D204と、突出部D205と、を有する。
軸部D201は、連結部材D20によって支持される2つの歯車部材D18のうち−S1方向側の歯車部材D18の孔部D182(図14参照)に挿入されて、当該−S1方向側の歯車部材D18の回動中心部を構成する。
軸部D201は、連結部材D20によって支持される2つの歯車部材D18のうち+S1方向側の歯車部材D18の孔部D181(図14参照)に挿入されて、当該+S1方向側の歯車部材D18の回動中心部を構成する。
これら軸部D201,D202は、孔部D182,D181に挿入された後、当該軸部D201,D202の先端部にEリングRN(図12及び図13参照)が取り付けられることにより、連結部材D20からの歯車部材D18の抜けが抑制される。
なお、複数の連結部材D20のうち、最も−S1方向側に位置する連結部材D20の噛合部D203は、当該−S1方向側に位置する連結部材D21と噛合し、最も+S1方向側に位置する連結部材D20の噛合部D204は、当該+S1方向側に位置する連結部材D22と噛合する。
噛合部D222は、−S1方向側の端面に形成された複数の歯により構成され、当該連結部材D22に対して−S1方向側に位置する連結部材D20の噛合部D204と噛合する。
軸部D224は、突出部D223における−T1方向側の端面に位置する円筒状部分である。この軸部D224は、上記のように、第2回動部材D16の孔部D163に挿入され、これにより、連結部材D22、ひいては、押圧部材D17の他端側終端部が、第2回動部材D16と連結される。
そして、−T1方向側に突出する軸部D211は、最も−S1方向側に位置する歯車部材D18の孔部D181に挿入され、これにより、当該歯車部材D18の連結部材D21に対する回動中心部を構成する。なお、軸部D211の先端部には、上記EリングRNが取り付けられる。
突出部D213は、連結部材D21において−S1方向側に位置し、突出部D223と同様に−T1方向側に突出している。
軸部D214は、突出部D213における−T1方向側の端面に位置する円筒状部分である。この軸部D214は、上記のように、第1回動部材D15の孔部D153に挿入され、これにより、連結部材D21、ひいては、押圧部材D17の一端側終端部が、第1回動部材D15と連結される。
ここで、押圧部材D17により形成される円弧の径の拡縮について、図10及び図11を参照して説明する。
図10に示した状態(縮径状態)から、回動装置D13のスピンドルギアD131が+U1方向に回動すると、第1回動部材D15が+U2方向に回動する。これにより、押圧部材D17において−S1方向側の端部(一端側終端部)に位置し、かつ、第1回動部材D15と連結された連結部材D21が+S1方向に移動される。
一方、第1回動部材D15の+U2方向への回動に伴って、当該第1回動部材D15と噛合する第2回動部材D16が+U3方向に回動する。これにより、押圧部材D17において+S1方向側の端部(他端側終端部)に位置し、かつ、第2回動部材D16と連結された連結部材D22が−S1方向に移動される。
このように押圧部材D17の+S1方向側及び−S1方向側の両端が広げられることにより、図11に示すように、当該押圧部材D17によって形成される円弧が拡径される。この際、押圧部材D17において+S1方向における略中央が、回動装置D13から離間する方向に突出することから、当該押圧部材D17に沿う右手RHの部位に押圧力が作用する。
このように押圧部材D17の+S1方向側及び−S1方向側の両端が狭められることにより、図10に示したように、当該押圧部材D17によって形成される円弧が縮径される。この際、押圧部材D17において+S1方向における略中央が、回動装置D13に近接する方向に移動されることから、当該押圧部材D17に沿う右手RHの部位への押圧が解除される。
なお、このような押圧部材D17の拡径状態及び縮径状態のそれぞれで、円弧の中心は同じ位置である。
図16は、操作装置1Rにおける拡縮装置D1の押圧部材D17及び回動装置D13と、当該操作装置1Rが装着された右手RH(特に中指RH3)との位置関係を示す図である。なお、図16においては、上部カバーD11の図示を省略している。
拡縮装置D1は、上記のように、中指RH3、薬指RH4及び小指RH5に応じた下側筐体部32内の部位に位置する反力発生部62〜64を構成する。
これらのうち、中指RH3に応じて配置される拡縮装置D1では、図16に示すように、押圧部材D17が、右手RHにおいて少なくとも掌RH6及び中指RH3に沿うように配置される。このため、回動装置D13が動作して、押圧部材D17が図11に示した拡径状態となる場合には、少なくとも掌RH6及び中指RH3に上記押圧力や反力が作用する。なお、本実施形態では、親指RH1が、上記第1操作部311ではなく、中指RH3とで下側筐体部32を把持するように当該下側筐体部32に配置された場合には、当該親指RH1も押圧部材D17の一部に沿う。すなわち、押圧部材D17は、拡径状態にて親指RH1、掌RH6及び中指RH3に沿うように、上記+S1方向の寸法が設定されている。しかしながら、これに限らず、押圧部材D17の上記+S1方向に沿う寸法は、少なくとも掌RH6に沿う寸法であれば、適宜変更してよい。
以上説明した操作装置1を利用することによって、例えば以下の内容をユーザーUSに知覚させることができる。なお、下記利用例において、各拡縮装置D1の動作(例えば上記円弧の径及び押圧力)が、各指の位置を検出する位置検出部としての光センサーLS3〜LS5による検出結果に基づいて制御されることにより、操作装置1を把持する手の状態及び指の位置に応じた触覚を、ユーザーUSに適切に付与できる。
ユーザーUSが操作装置1を把持している状態で、上記反力発生部62〜64の拡縮装置D1が独立又は協働して動作して、各押圧部材D17により形成される円弧の径が拡縮されることにより、情報処理装置PDによって処理されるゲーム等における操作対象の形状変化に応じた操作装置1の形状変化を実現できる。これにより、ユーザーUSが仮想的に把持する操作対象の形状が変化する触覚を当該ユーザーUSに付与できる。
例えば、当該操作対象が太い場合には、上記円弧を予め拡径させたり、ユーザーUSが操作装置1を握り始めた時点で当該円弧を拡径させたりすることにより、当該操作対象の太さをユーザーUSに知覚させることができる。また、操作対象が細い場合には、ユーザーUSが操作装置1を握りきる時点で当該円弧を拡径させることにより、当該操作対象の細さをユーザーUSに知覚させることができる。同様に、操作対象の太さ(細さ)が中程度である場合には、ユーザーUSが操作装置1を握りきる途中で当該円弧を拡径させることにより、当該太さをユーザーUSに知覚させることができる。
上記円弧の拡径時の押圧部材D17による掌(例えば掌RH6)に対する押圧方向が重力方向に沿うように操作装置1が手に装着されている状態(掌が重力方向とは反対方向側を向く状態)で、当該円弧を拡径させて、押圧部材D17によって掌に作用する押圧力を調整することにより、重力方向への押圧力、すなわち、上記操作対象の重さをユーザーUSに知覚させることができる。
また、図1に示したように、左手LH及び右手RHによって上記操作対象を仮想的に挟持するような操作装置1L,1Rの配置状態において、各操作装置1L,1Rによる掌への上記押圧力を異ならせることにより、当該操作対象の重さの偏りやバランスの変化をユーザーUSに知覚させることができる。この場合、情報処理装置PDは、点灯される発光部5L,5Rの位置を検出することによって各操作装置1L,1Rの位置を検出できるので、当該情報処理装置PDは、各操作装置1L,1Rが上記配置状態にあることを把握でき、当該情報処理装置PDが各操作装置1L,1Rに制御情報を個別に送信してそれぞれの押圧力を個別に制御することにより、上記操作対象の重さの偏りやバランスの変化をユーザーUSに知覚させることができる。
ユーザーUSが操作装置1を握る際に、各拡縮装置D1が独立又は協働して動作して、上記円弧の径を拡縮させることにより、ユーザーUSが操作装置1を握る操作に対する反力を作用させることができる。例えば、制御部7が、情報処理装置PDから受信される上記情報に基づいて、回動装置D13が移動部材D14を移動させる際のトルクを制御して、上記円弧が縮径される握り操作に対して当該円弧を拡径させることにより、上記操作対象に設定された弾力や硬さに応じた反力をユーザーUSに付与できる。
各拡縮装置D1が協働して動作して、中指(例えば中指RH3)に応じた拡縮装置D1による押圧力を大きくし、薬指(例えば薬指RH4)に応じた拡縮装置D1による押圧力を小さくし、小指(例えば小指RH5)に応じた拡縮装置D1による押圧力を更に小さくすることにより、上記操作対象の回転をユーザーUSに知覚させることができる他、これらの押圧力を調整することにより、当該操作対象の回転力をユーザーUSに知覚させることができる。一方、小指に応じた拡縮装置D1による押圧力を大きくし、薬指に応じた拡縮装置D1による押圧力を小さくし、中指に応じた拡縮装置D1による押圧力を更に小さくすることにより、上記とは逆方向への操作対象の回転をユーザーUSに知覚させることができる他、これらの押圧力を調整することにより、当該操作対象の回転力をユーザーUSに知覚させることができる。
以上説明した本実施形態に係る操作装置1は、以下の効果を有する。
拡縮装置D1は、円弧状をなし、湾曲可能に構成された押圧部材D17と、回動部としてのスピンドルギアD131を有する回動装置D13と、一端が当該スピンドルギアD131と連結され、他端が押圧部材D17の一端側終端部と接続される移動部材D14の第1回動部材D15と、回動装置D13に固定された固定部材D132に配置されて、押圧部材D17の他端側終端部を支持する支持部材としての第2回動部材D16とを備える。
これによれば、スピンドルギアD131が回動されると、一端が当該スピンドルギアD131に連結され、他端が押圧部材D17の一端側終端部と接続された第1回動部材D15が移動(回動)され、第2回動部材D16によって他端側終端部が支持された押圧部材D17によって形成される円弧の径が拡縮される。これによれば、押圧部材D17がユーザーUSの掌RH6に当接された状態から上記円弧が拡径されることにより、当該掌RH6に押圧力や反力を作用させることができる。このような拡縮装置D1が、ユーザーUSの片手によって把持される操作装置1に採用され、例えばゲームや作業の進行状態に応じて当該円弧の径が拡縮されることにより、操作装置1による操作対象の形状や回転の他、当該操作対象の大きさ及び硬さ等の性質をユーザーに知覚させることができる。従って、ユーザーUSに触覚フィードバックを付与できる。
これによれば、直列に噛合した複数の歯車部材D18は、複数の連結部材D19(D20〜D22)によって連結されて円弧状の押圧部材D17を構成し、当該押圧部材D17の他端側終端部を構成する連結部材D22は、第2回動部材D16と連結される。そして、スピンドルギアD131の回動に伴って、連結部材D21と連結された第1回動部材D15が回動されると、各歯車部材D18が回動して、上記円弧の径が変更される。このため、第1回動部材D15の回動に伴って段階的に押圧部材が湾曲する場合に比べて、当該押圧部材D17の湾曲を滑らかに行うことができ、ひいては、押圧部材D17の径の拡縮を滑らかに行うことができる。従って、ユーザーUSに作用される押圧力の変化を細かく設定できる他、上記操作対象の性質をより詳細に表現できる。
これによれば、隣り合う歯車部材D18と噛合部D183,D184にて噛合する歯車部材D18は、孔部D181,D182にて、2つの連結部材D20に対して回動可能に構成される。このため、一端側の歯車部材D18が連結部材D20に対して回動した場合に、直列に噛合する各歯車部材D18を、上記円弧が拡径される方向、又は、縮径される方向に確実に移動させることができる。従って、押圧部材D17によって形成される円弧の拡縮を確実に実施できる。
これによれば、+S1方向及び−S1方向にて隣り合う連結部材D20〜D22が互いに噛合することにより、押圧部材D17の湾曲動作、すなわち、当該押圧部材D17により形成される円弧の径の拡縮動作を滑らかに行うことができる。
これによれば、第2回動部材D16が回動装置D13に設けられていることにより、押圧部材D17の他端側終端部(連結部材D22)を確実に支持できる。従って、一端側終端部を構成する連結部材D21に接続された第1回動部材D15の回動に伴って、押圧部材D17の拡縮を確実に実施できる。
これによれば、回動装置D13が拡縮装置D1の外側に突出することを抑制できるので、当該拡縮装置D1を小型化できる。
これによれば、第1回動部材D15と第2回動部材D16とが、スピンドルギアD131の回動に伴って互いに反対方向に回動することにより、押圧部材D17の拡縮を確実に実施できる。この他、回動部材D15,D16によって押圧部材D17の両端(一端側終端部及び他端側終端部)に、当該押圧部材D17を拡縮させる力が加わるので、押圧部材D17を安定して拡縮させることができる。
これによれば、例えばゲームや作業の進行状態に応じて反力発生部62〜64が掌RH6を押圧することにより、操作装置1Rによる操作対象の形状や回転の他、当該操作対象の大きさ及び硬さ等の性質をユーザーUSに知覚させることができる。従って、ユーザーUSに触覚フィードバックを付与できる。また、反力発生部62〜64が、操作装置1Rが装着された右手RHの掌RH6を押圧することにより、当該操作装置1Rから指を離した場合でも、上記触覚をユーザーUSに付与できる。従って、操作装置1Rの汎用性を向上させることができる。なお、操作装置1Rと左右対称構造を有する操作装置1Lにおいても同様の効果を奏することができる。
これによれば、拡縮装置D1の押圧部材D17により形成される円弧の径が拡縮されることにより、ユーザーUSの手に押圧力を確実に作用させることができ、上記触覚を操作装置1RのユーザーUSに確実に付与できる。操作装置1Lにおいても同様である。
これによれば、押圧部材D17を拡径させることにより、当該掌RH6を確実に押圧できる。そして、このような押圧部材D17に対して掌RH6とは反対側に回動装置D13が配置されることにより、押圧部材D17の拡縮動作に対して回動装置D13が邪魔になることを抑制できる。操作装置1Lにおいても同様である。
これによれば、掌RH6だけでなく各指RH3〜RH5にも上記押圧力及び反力を作用させることができる。そして、これら反力発生部62〜64を独立又は協働して動作させることにより、より多様な触覚をユーザーUSに付与できる。従って、操作装置1Rの汎用性を向上させることができる。操作装置1Lにおいても同様である。
これによれば、例えば操作装置1Rを握った状態から上記拡縮装置D1の押圧部材D17により形成される円弧を縮径させることも可能となる。従って、より一層多様な触覚をユーザーUSに付与でき、操作装置1Rの汎用性を向上させることができる。操作装置1Lにおいても同様である。
次に、本発明の第2実施形態について説明する。
本実施形態に係る操作装置は、上記操作装置1と同様の構成及び機能を有するが、反力発生部62〜64が有する拡縮装置の構成が異なる。なお、以下の説明では、既に説明した部分と同一又は略同一である部分については、同一の符号を付して説明を省略する。
本実施形態に係る操作装置は、反力発生部62〜64のそれぞれが拡縮装置D1に代えて拡縮装置D3を有する他は、上記操作装置1と同様の構成及び機能を有する。
この拡縮装置D3は、上記拡縮装置D1と同様に、ユーザーUSに押圧力や入力操作(握り操作等)に対する反力を作用させて、当該ユーザーUSに触覚を付与するものである。このような拡縮装置D3は、図17及び図18に示すように、回動装置D13、支持部材D31、移動部材D32及び押圧部材D33を備える。
図19は、支持部材D31を示す斜視図である。具体的に、図19は、押圧部材D33側から支持部材D31を見た斜視図である。
支持部材D31は、回動装置D13に固定され、移動部材D32と押圧部材D33の一端とを支持する部材である。この支持部材D31は、図19に示すように、固定部D311、ねじ孔D312、凹部D313、段差部D314、軸部D315、当接部D316、噛合部D317及び軸部D318を有する。
固定部D311は、支持部材D31における−T2方向側の面に位置し、当該固定部D311には、回動装置D13と支持部材D31とを固定するねじ(図示省略)が螺合する複数のねじ孔D312が形成されている。
凹部D313は、固定部D311における一端側に略円形状に形成され、当該一端側に開口している。この凹部D313内には、回動装置D13のスピンドルギアD131が配置される。
軸部D315は、段差部D314の略中央に−T2方向に突設されている。この軸部D315は、移動部材D32に挿入され、当該移動部材D32の回動中心部を構成する。
当接部D316は、支持部材D31における他端側に凹状に形成され、本実施形態に係る操作装置が装着された手の指(例えば親指)が当接可能に構成されている。
噛合部D317は、側方に突出した半円筒状部分の外周に形成された複数の歯により構成されている。この噛合部D317には、押圧部材D33の歯車列D33Aを構成する複数の歯車部材D34のうち、最も+S2方向側に位置する歯車部材D34と噛合する。
軸部D318は、噛合部D317から+T2方向に突出している。この軸部D318は、押圧部材D33の歯車列D33Bを構成する複数の歯車部材D34のうち、最も+S2方向側に位置する歯車部材D34の孔部D342に挿入され、これにより、当該歯車部材D34、すなわち、押圧部材D33の他端側終端部が回動可能に支持される。
図20は、スピンドルギアD131を除いて回動装置D13の図示を省略した拡縮装置D3を−T2方向側から見た平面図である。
移動部材D32は、上記段差部D314上に配置されるアーム様部材であり、スピンドルギアD131の回動に伴って押圧部材D33を移動させ、これにより、当該押圧部材D33によって形成される円弧の径を拡縮させる。この移動部材D32は、図20に示すように、孔部D321、D323及び噛合部D322を有する。
噛合部D322は、本発明の移動部材側噛合部に相当し、移動部材D32においてスピンドルギアD131と噛合する複数の歯により構成されている。
孔部D323は、本発明の移動部材側孔部に相当し、移動部材D32における一端に円弧状に形成されたガイド孔である。具体的に、孔部D323は、移動部材D32の長手方向、すなわち、移動部材D32の回動方向に交差する方向に沿う円弧状に形成されている。この孔部D323には、押圧部材D33において最も−S2方向側に位置する歯車部材D35の挿入部D353が挿通される。
図21及び図22は、押圧部材D33を示す分解斜視図である。
押圧部材D33は、上記押圧部材D17と同様に、ユーザーUSの掌及び指に押圧力及び反力を作用させて、当該ユーザーUSに触覚を付与する。この押圧部材D33は、図21及び図22に示すように、互いに組み合わされる複数の歯車部材D34,D35を備え、円弧状をなし、湾曲可能に構成されている。詳述すると、押圧部材D33は、複数の歯車部材D34により構成され、かつ、−T2方向側に位置する歯車列D33Aと、同じく複数の歯車部材D34により構成され、かつ、+T2方向側に位置する歯車列D33Bと、当該歯車列D33Bにおける−S2方向側に位置する歯車部材D34と噛合するとともに、歯車列D33Aにおける−S2方向側に位置する歯車部材D34に支持される歯車部材D35と、を有する。
このような押圧部材D33では、歯車列D33Bを構成する歯車部材D34,D35は、歯車列D33Aを構成する複数の歯車部材D34を連結する複数の連結部材ということができる。また、見方によっては、歯車列D33Aを構成する複数の歯車部材D34は、歯車列D33Bを構成する歯車部材D34,D35を連結する複数の連結部材ということもできる。
歯車部材D34は、上記歯車部材D18と連結部材D20とを組み合わせた構成を有する。具体的に、歯車部材D34は、軸部D341、孔部D342、噛合部D343,344及び突出部D345を有する。
軸部D341は、歯車部材D18における孔部D181の位置から円筒状に突出した部位である。この軸部D341は、他の歯車部材D34の孔部D342又は歯車部材D35の孔部D351に挿入され、これにより、当該他の歯車部材D34,D35を回動可能に連結する。
孔部D342は、歯車部材D18における孔部D182と同様に、歯車部材D34を+T2方向に沿って貫通している。この孔部D342には、他の歯車部材D34の軸部D341が挿入される。
なお、これら軸部D341及び孔部D342は、噛合部D343,D344の円弧の中心に位置する。また、これら軸部D341及び孔部D342は、第1回動中心部及び第2回動中心部を構成する。そして、軸部D341は、歯車部材側軸部及び連結部材側軸部に相当し、孔部D342は、歯車部材側孔部及び連結部材側孔部に相当する。
突出部D345は、連結部材D20における突出部D205と同様に、歯車部材D34における外周側部分の略中央から、軸部D341の突出方向と同方向に略三角柱状に突出している。この突出部D345は、上記孔部D342に挿入される軸部D341を有する歯車部材D34と、当該歯車部材D34に噛合するとともに上記軸部D341が挿入される孔部D342を有する歯車部材D34との連結部分(噛合部分)の外周側に配置され、これにより、当該連結部分を保護する。
孔部D351は、歯車列D33Aにおいて最も−S2方向側に位置する歯車部材D34の軸部D341が挿入される。これにより、当該歯車部材D34は、歯車部材D35に対して回動可能に支持される。
噛合部D352は、歯車列D33Bにおいて最も−S2方向側に位置する歯車部材D34の噛合部D343と噛合する。
挿入部D353は、−T2方向側に略円柱状に突出している。この挿入部D353は、上記移動部材D32の孔部D323に挿入される。なお、挿入部D353の先端には、EリングRN及びワッシャーWH(図20参照)が取り付けられる。
なお、本実施形態では、歯車列D33Aは、3つの歯車部材D34を備えて構成され、歯車列D33Bは、3つの歯車部材D34及び1つの歯車部材D35を備えて構成されている。そして、これら歯車部材D34,D35には、本発明の第1〜第3歯車部材、並びに、第1及び第2連結部材が含まれる。しかしながら、これに限らず、歯車列D33A,D33Bに採用される歯車部材D34の数は、適宜変更可能である。
ここで、押圧部材D33により形成される円弧の径の拡縮について、図20を参照して説明する。
図20に示した状態(縮径状態)から、上記スピンドルギアD131が+V1方向に回動すると、当該スピンドルギアD131と噛合する移動部材D32が+V2方向に回動する。これにより、移動部材D32の孔部D323に挿入された挿入部D353が、当該孔部D323に沿って移動して、歯車部材D35が+S2方向に移動される。このように歯車部材D35が+S2方向に移動されると、押圧部材D33の+S2方向側及び−S2方向側の両端が広げられ、当該押圧部材D33によって形成される円弧が拡径される。この際、押圧部材D33において+S2方向における略中央が、回動装置D13から離間する方向に突出することから、当該押圧部材D33に沿う手の部位(例えば掌RH6)に押圧力が作用する。
図23は、拡縮装置D3の押圧部材D33及び回動装置D13と、当該拡縮装置D3を有する操作装置が装着された右手RH(特に中指RH3)との位置関係を示す図である。
右手RHに装着される操作装置では、上記拡縮装置D3は、上記のように、中指RH3、薬指RH4及び小指RH5に応じて設けられる反力発生部62〜64を構成する。
これらのうち、反力発生部62の拡縮装置D3では、図23に示すように、押圧部材D33が、右手RHにおいて少なくとも掌RH6及び中指RH3に沿うように配置される。このため、押圧部材D33が拡径状態となる場合には、少なくとも掌RH6及び中指RH3に上記押圧力や反力が作用する。すなわち、押圧部材D33は、拡径状態で掌RH6及び中指RH3に沿うように、上記+S2方向の寸法が設定されている。しかしながら、これに限らず、押圧部材D33の上記+S2方向に沿う寸法は、少なくとも掌RH6に沿う寸法であれば、適宜変更してよい。
なお、拡縮装置D3は、親指RH1が当接可能な当接部D316が設けられていることから、当該当接部D316を筐体3外に露出させれば、当該拡縮装置D3を親指RH1及び中指RH3によって把持しやすくすることができる。
このような拡縮装置D3を備えた操作装置を利用することによっても、上記操作装置1と同様の触覚をユーザーUSに知覚させることができる。
以上説明した本実施形態に係る操作装置は、上記操作装置1と同様の効果を有する。
例えば、拡縮装置D3は、円弧状をなし、湾曲可能に構成された押圧部材D33と、スピンドルギアD131を有する回動装置D13と、一端がスピンドルギアD131と噛合し、他端が押圧部材D33において一端側終端部に位置する歯車部材D35と接続され、スピンドルギアD131の回動に伴って回動されて、押圧部材D33により形成される円弧の径を変更する移動部材D32と、回動装置D13に固定されて、押圧部材D33において他端側終端部に位置する歯車部材D34(最も+S2方向側に位置する歯車部材D34)を支持する支持部材D31と、を備える。
これによれば、スピンドルギアD131が回動されると、移動部材D32が回動され、支持部材D31によって歯車部材D34が支持された押圧部材D33により形成される円弧の径が変更される。これによれば、押圧部材D33がユーザーUSの人体の一部(例えば掌RH6)に当接された状態で、当該円弧が拡径された場合に、当該一部に押圧力を作用させることができる。また、このような拡縮装置D3が、ユーザーUSの片手によって把持される操作装置に採用され、例えばゲームや作業の進行状態に応じて当該円弧が拡径又は縮径されることにより、操作装置による操作対象の形状や回転の他、当該操作対象の大きさ及び硬さ等の性質をユーザーに知覚させることができる。従って、ユーザーに触覚を付与できる。
このような構成によれば、歯車部材D34同士が互いに組み合わされるので、複数の歯車部材D34の連結、ひいては、押圧部材D33の製造を容易に実施できる。従って、拡縮装置D3の製造工程を簡略化できる。
これによれば、押圧部材D33において他端側終端部となる歯車部材D34と噛合する支持部材D31が回動装置D13に固定されるので、当該歯車部材D34が意図せず移動されることを抑制でき、当該歯車部材D34を安定して支持できる。従って、一端側終端部を構成する歯車部材D35に接続される移動部材D32の回動に伴って、押圧部材D33の拡縮を確実に実施できる。
これによれば、スピンドルギアD131の回動に伴って移動部材D32が回動された際に、挿入部D353が孔部D323に沿って移動されることによって、押圧部材D33の一端側終端部と他端側終端部との間が拡大又は縮小されて、押圧部材D33により形成される円弧の径が拡縮されるので、押圧部材D33の拡縮を無理なく円滑に実施できる。
次に、本発明の第3実施形態について説明する。
本実施形態に係る操作装置は、上記操作装置1と同様の構成及び機能を有するが、反力発生部62〜64が有する拡縮装置の構成が異なる。なお、以下の説明では、既に説明した部分と同一又は略同一である部分については、同一の符号を付して説明を省略する。
本実施形態に係る操作装置は、拡縮装置D1に代えて拡縮装置D5を有する他は、上記操作装置1と同様の構成及び機能を有する。
この拡縮装置D5は、上記拡縮装置D1と同様に、ユーザーUSに押圧力や入力操作に対する反力を作用させる反力発生部62〜64のそれぞれを構成して、当該ユーザーUSに触覚を付与するものである。このような拡縮装置D5は、図24及び図25に示すように、回動装置D13、支持部材D51、移動部材D52及び押圧部材D55を備える。
支持部材D51は、回動装置D13に固定されて移動部材D52を支持する部材であり、側方から見て横向きの略U字状に形成されている。この支持部材D51の内側には、回動装置D13のスピンドルギアD131が配置される他、移動部材D52を構成する一対のスライド部材D53,54が、当該スピンドルギアD131と噛合した状態で配置される。このような支持部材D51は、図示を省略するが、一対のスライド部材D53,D54のスライドを案内するガイドレールを有する。
図26は、押圧部材D55を分解した拡縮装置D5を示す斜視図である。なお、図26においては、スピンドルギアD131を除く回動装置D13、及び、支持部材D51の図示を省略している。
移動部材D52は、スピンドルギアD131の回転に伴って移動して、押圧部材D55により形成される円弧の径を拡縮させるものである。この移動部材D52は、図26に示すように、スピンドルギアD131を−T3方向側及び+T3方向側から挟むように配置され、かつ、当該スピンドルギアD131と噛合する一対のスライド部材D53,D54を有する。
そして、スピンドルギアD131が+W1方向に回動されると、噛合部D531にてスピンドルギアD131と噛合するスライド部材D53は、当該スピンドルギアD131の回動軸に直交する+W2方向に移動し、噛合部D541にてスピンドルギアD131と噛合するスライド部材D54は、+W2方向とは反対方向である−W2方向に移動する。
一方、スピンドルギアD131が−W1方向に回動されると、スライド部材D53は−W2方向に移動し、スライド部材D54は+W2方向に移動する。
すなわち、スライド部材D53,D54の少なくとも一方は、本発明の支持部材としても機能する。
図27は、図26に示した状態の拡縮装置D5を反対側から見た斜視図である。
押圧部材D55は、上記押圧部材D17,D33と同様に、ユーザーUSの掌及び指に押圧力及び反力を作用させて、当該ユーザーUSに触覚を付与する。この押圧部材D55は、図26及び図27に示すように、複数の上記歯車部材D34が互いに組み合わされて構成されている。
具体的に、押圧部材D55は、−T3方向側に位置し、かつ、複数の歯車部材D34が噛合部D343,344にて直列に噛合して構成された歯車列D55Aと、+T3方向側に位置し、かつ、複数の歯車部材D34が上下を逆にして噛合部D343,344にて直列に噛合して構成された歯車列D55Bと、を有する。この押圧部材D55では、歯車列D55Aを構成する各歯車部材D34の軸部D341及び突出部D345が+T3方向側(歯車列D55B側)に突出し、かつ、歯車列D55Bを構成する各歯車部材D34の軸部D341及び突出部D345が−T3方向側(歯車列D55A側)に突出するように配置される。そして、歯車列D55Aを構成する各歯車部材D34の軸部D341が、歯車列D55Bを構成する各歯車部材D34の孔部D342に挿入され、かつ、歯車列D55Aを構成する各歯車部材D34の孔部D342に、歯車列D55Bを構成する各歯車部材D34の軸部D341が挿入されることにより、押圧部材D55は構成される。なお、図示を省略するが、軸部D341の先端には、上記EリングRNが取り付けられる。
なお、歯車列D55A,D55Bは、それぞれ同数の歯車部材D34によって構成されており、本実施形態では、それぞれ5つの歯車部材D34によって構成されている。そして、当該歯車列D55A,D55Bを構成する歯車部材D34には、本発明の第1〜第3歯車部材、並びに、第1及び第2連結部材が含まれる。しかしながら、各歯車列D55A,D55Bを構成する歯車部材D34の数は、拡縮装置D5の大きさ等に応じて適宜変更してよい。
これらのうち、+S3方向側に突出する歯車部材D34の孔部D342には、上記のように、連結部D542の孔部D543を挿通したピンPNが挿入される。これにより、スライド部材D54と押圧部材D55における+S3方向側の端部とが連結される。
一方、−S3方向側に突出する歯車部材D34の軸部D341は、上記のように、連結部D532の孔部D533に挿入される。これにより、スライド部材D53と押圧部材D55における−S3方向側の端部とが連結される。
ここで、押圧部材D55により形成される円弧の径の拡縮について、図24を参照して説明する。
図24に示した状態(縮径状態)から、上記スピンドルギアD131が+W1方向に回動すると、当該スピンドルギアD131と噛合するスライド部材D53が+W2方向に移動し、同じくスピンドルギアD131と噛合するスライド部材D54が−W2方向に移動する。これにより、押圧部材D55において、スライド部材D53と連結された−S3方向側の端部と、スライド部材D54と連結された+S3方向側の端部とが広げられ、当該押圧部材D55によって形成される円弧が拡径される。これにより、押圧部材D55における中央部分から+S3方向側及び−S3方向側の各部位が、拡径前の状態から外側に突出し、当該押圧部材D55に沿う手の部位に押圧力が作用する。
図28は、拡縮装置D5の押圧部材D55及び回動装置D13と、当該拡縮装置D5を有する操作装置が装着された右手RH(特に中指RH3)との位置関係を示す図である。
右手RHに装着される操作装置では、上記拡縮装置D5は、上記のように、中指RH3、薬指RH4及び小指RH5に応じて設けられる反力発生部62〜64を構成する。
これらのうち、中指RH3に応じて配置される拡縮装置D5では、図28に示すように、押圧部材D55が、右手RHにおいて少なくとも掌RH6及び中指RH3に沿うように配置される。このため、回動装置D13が動作して押圧部材D55の径が拡大された場合には、少なくとも掌RH6及び中指RH3に上記押圧力及び反力が作用する。なお、本実施形態では、図28のように、親指RH1が、上記第1操作部311ではなく、中指RH3とで下側筐体部32を把持するように当該下側筐体部32に配置された場合には、当該親指RH1も押圧部材D55に沿う。すなわち、押圧部材D55は、拡径状態で親指RH1、掌RH6及び中指RH3に沿うように、上記+S3方向の寸法が設定されている。しかしながら、これに限らず、押圧部材D55の上記+S3方向に沿う寸法は、少なくとも掌RH6に沿う寸法であれば、適宜変更してよい。
このような拡縮装置D5を備えた操作装置を利用することによっても、上記操作装置1と同様の触覚をユーザーUSに知覚させることができる。
以上説明した本実施形態に係る操作装置は、上記操作装置と同様の効果を有する。
例えば、拡縮装置D5は、円弧状をなし、湾曲可能に構成された押圧部材D55と、スピンドルギアD131を有する回動装置D13と、一端がスピンドルギアD131と連結され、他端が押圧部材D55の一端側終端部と接続され、当該スピンドルギアD131の回動に伴って移動されるスライド部材D53と、一端がスピンドルギアD131と連結され、他端が押圧部材D55の他端側終端部と接続され、当該スピンドルギアD131の回動に伴ってスライド部材D53とは反対方向に移動されるスライド部材D54と、を備える。そして、スライド部材D53,D54が上記のようにスライド移動することによって、押圧部材D55により形成される円弧の径が変更される。
これによれば、押圧部材D55がユーザーUSの人体の一部(例えば掌RH6)に当接された状態で、上記円弧が拡径された場合に、当該一部に押圧力を作用させることができる。また、例えば、このような拡縮装置D5が、上記操作装置に採用されて、例えばゲームや作業の進行状態に応じて当該円弧が拡径又は縮径されることにより、操作装置による操作対象の形状や回転の他、当該操作対象の大きさ及び硬さ等の性質をユーザーUSに知覚させることができる。従って、ユーザーUSに触覚を付与できる。
これによれば、各スライド部材D53,D54が、スピンドルギアD131の回動に伴って互いに接離する方向に移動することにより、押圧部材D55により形成される円弧の拡径及び縮径を確実に実施できる。この他、各スライド部材D53,D54によって押圧部材D55の一端側終端部及び他端側終端部に、当該押圧部材D55を拡縮させる力が加わるので、押圧部材D55を安定して拡縮させることができる。
なお、移動部材D52を構成するスライド部材は、1つでもよい。例えば、当該スライド部材に押圧部材D55の一端が連結され、支持部材D51や回動装置D13等の不動部材に押圧部材D55の他端が連結されている場合でも、当該スライド部材の移動に伴って、押圧部材D55により構成される円弧の径を拡縮させることは可能である。
これによれば、各スライド部材D53,D54が、互い違いに押圧部材D55と連結されるので、同じ歯車列の歯車部材D34と連結される場合に比べて、拡縮装置D5の厚さ寸法(+T3方向に沿う寸法)を小さくすることができる。従って、拡縮装置D5の小型化を図ることができる。
次に、本発明の第4実施形態について説明する。
本実施形態に係る操作装置は、上記操作装置1と同様の構成及び機能を有するが、反力発生部62〜64が有する拡縮装置の構成が異なる。なお、以下の説明では、既に説明した部分と同一又は略同一である部分については、同一の符号を付して説明を省略する。
本実施形態に係る操作装置は、反力発生部62〜64のそれぞれが拡縮装置D1に代えて拡縮装置D7を有する他は、上記操作装置1と同様の構成及び機能を有する。
この拡縮装置D7は、上記拡縮装置D1と同様に、ユーザーUSに押圧力や上記反力を作用させて、当該ユーザーUSに触覚を付与するものである。このような拡縮装置D7は、図29及び図30に示すように、上部カバーD11、下部カバーD12、複数の押圧部材D71、複数の駆動装置D72(図31参照)、及び、制御装置D73を備える。
これらのうち、制御装置D73は、各駆動装置D72の動作を制御する。
駆動装置D72は、移動部材としてのアームD721と、当該アームD721を回動させる移動装置D722と、を有する。
アームD721は、図30及び図31に示すように、一端が押圧部材D71内に形成されたガイド溝D711に挿入され、他端が移動装置D722に接続されている。
移動装置D722は、アームD721を+G1方向及び当該+G1方向とは反対方向である−G1方向に回動させる。この移動装置D722がアームD721を+G1方向に回動させると、当該アームD721の端部がガイド溝D711内を移動することにより、押圧部材D71が+G2方向に突出する。一方、移動装置D722がアームD721を−G1方向に回動させると、当該アームD721の端部がガイド溝D711内を上記とは反対方向に移動することにより、押圧部材D71が−G2方向に移動される。
このように、押圧部材D71が+G2方向に突出することにより、拡縮装置D7(押圧部材D71)に沿うように配置された掌(例えば掌RH6)を含む部位に、上記押圧力及び上記反力を作用させることができ、ユーザーUSに上記触覚を付与できる。
そして、このような拡縮装置D7を備えた操作装置を利用することによっても、上記操作装置1と同様の触覚をユーザーUSに知覚させることができる。
なお、駆動装置D72は、アームD721を+G1方向及び−G1方向に回動させて押圧部材D71を+G2方向及び−G2方向に移動させる構成に限らず、アームを+G2方向及び−G2方向に移動させることにより、押圧部材D71を+G2方向及び−G2方向に移動させる構成としてもよい。また、1つの押圧部材D71にそれぞれ係合する複数のアームを有する駆動装置を採用してもよい。
以上説明した本実施形態に係る操作装置によれば、上記操作装置1と同様の効果を奏することができる他、以下の効果を奏することができる。
操作装置は、掌RH6に押圧される押圧部材D71と、当該押圧部材D71を掌RH6側に進退させる駆動装置D72と、を有する拡縮装置D7を備える。
これによれば、駆動装置D72によって掌RH6側に進退される押圧部材D71によって、当該掌RH6に上記押圧力及び上記反力を確実に作用させることができる。
本発明は、上記実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
上記各実施形態では、押圧部材は、複数の歯車部材と、各歯車部材を連結する複数の連結部材と、を備える構成とした。しかしながら、これに限らず、押圧部材は、円弧状をなし、湾曲可能であれば、どのような構成の押圧部材であってもよい。例えば、可撓性を有する板体を湾曲させたものであってもよく、上記歯車部材D18を複数直列に噛合させ、隣り合う2つの歯車部材D18において孔部D181とD182とを略U字状の連結部材で連結した押圧部材であってもよい。
上記第2実施形態では、移動部材D32は、歯車列D33Bを構成する歯車部材D35と連結されるとした。しかしながら、これに限らず、歯車列D33Aを構成する歯車部材D34と連結されてもよい。
また、上記押圧部材D17,D33,D55のいずれかを、拡縮装置D1,D3,D5のいずれかが有する押圧部材に代えて採用してもよい。例えば、拡縮装置D1の押圧部材D17を、複数の歯車部材D34及び連結部材D21,D22を含む構成としてもよい。
また、拡縮装置は、掌及び指に押圧力及び反力を作用させるとしたが、掌のみであってもよく、指のみであってもよい。一方、拡縮装置が押圧力及び反力を作用させるユーザーUSの部位は、掌や指に限らず、他の部位であってもよい。
更に、当該押圧力を作用させる押圧機構の構成は、上記拡縮装置D1,D3,D5,D7を有する構成に限らず、他の構成でもよい。
Claims (14)
- ユーザーの片手に装着される操作装置であって、
前記片手の指に応じて複数設けられ、前記片手の掌を押圧する押圧機構と、
前記片手の指のうち前記押圧機構が設けられた指の位置を検出する検出装置と、
前記検出装置によって検出された前記指の位置に応じて、複数の前記押圧機構のそれぞれの動作を制御する制御装置と、を備えることを特徴とする操作装置。 - 請求項1に記載の操作装置において、
前記押圧機構は、拡縮装置を備え、
前記拡縮装置は、
円弧状をなし、湾曲可能に構成された押圧部材と、
回動部を有する1つの回動装置と、
一端が前記回動部と連結され、他端が前記押圧部材における一端側終端部と接続され、前記回動部の回動に伴って移動されて、前記押圧部材により形成される円弧の径を変更する移動部材と、
所定位置に配置されて、前記押圧部材における他端側終端部を支持する支持部材と、を備え、
前記1つの回動装置にて生じた力は、前記移動部材によって前記一端側終端部に作用されるとともに、前記支持部材によって前記他端側終端部に作用されることを特徴とする操作装置。 - 請求項2に記載の操作装置において、
前記回動装置は、前記円弧の内側に配置されていることを特徴とする操作装置。 - 請求項1に記載の操作装置において、
前記押圧機構は、拡縮装置を備え、
前記拡縮装置は、
円弧状をなし、湾曲可能に構成された押圧部材と、
回動部を有する回動装置と、
一端が前記回動部と連結され、他端が前記押圧部材における一端側終端部と接続され、前記回動部の回動に伴って移動されて、前記押圧部材により形成される円弧の径を変更する移動部材と、
所定位置に配置されて、前記押圧部材における他端側終端部を支持する支持部材と、を備え、
前記回動装置は、前記円弧の内側に配置され、
前記移動部材は、
一端が前記回動部と係合し、他端が前記一端側終端部と連結され、前記回動部の回動に伴って前記回動部の回動軸と平行な回動軸を中心として回動する第1回動部材と、
一端が前記第1回動部材と係合し、他端が前記他端側終端部と連結され、前記第1回動部材の回動に伴って前記回動部の回動軸と平行な回動軸を中心として前記第1回動部材とは反対方向に回動する第2回動部材と、を含み、
前記支持部材は、前記第2回動部材であることを特徴とする操作装置。 - 請求項1に記載の操作装置において、
前記押圧機構は、拡縮装置を備え、
前記拡縮装置は、
円弧状をなし、湾曲可能に構成された押圧部材と、
回動部を有する回動装置と、
一端が前記回動部と連結され、他端が前記押圧部材における一端側終端部と接続され、前記回動部の回動に伴って移動されて、前記押圧部材により形成される円弧の径を変更する移動部材と、
所定位置に配置されて、前記押圧部材における他端側終端部を支持する支持部材と、を備え、
前記一端側終端部は、前記移動部材に挿入される挿入部を有し、
前記移動部材は、
前記回動部と噛合する移動部材側噛合部と、
前記回動部の回動軸と平行で、前記移動部材の回動軸となる移動部材側回動中心部と、
前記移動部材の回動方向に対して交差する方向に長径が設定され、前記挿入部が挿入される移動部材側孔部と、を有することを特徴とする操作装置。 - 請求項1に記載の操作装置において、
前記押圧機構は、拡縮装置を備え、
前記拡縮装置は、
円弧状をなし、湾曲可能に構成された押圧部材と、
回動部を有する回動装置と、
一端が前記回動部と連結され、他端が前記押圧部材における一端側終端部と接続され、前記回動部の回動に伴って移動されて、前記押圧部材により形成される円弧の径を変更する移動部材と、
所定位置に配置されて、前記押圧部材における他端側終端部を支持する支持部材と、を備え、
前記移動部材は、それぞれ前記回動部と係合して、前記回動部の回動軸に直交する方向に沿って互いに接離する一対のスライド部材を含み、
前記一対のスライド部材のうち、
一方は、前記一端側終端部と連結され、
他方は、前記他端側終端部と連結されることを特徴とする操作装置。 - 請求項6に記載の操作装置において、
前記押圧部材は、
直列に噛合して円弧状に配列された複数の歯車部材と、
前記複数の歯車部材のうち互いに噛合する2つの歯車部材をそれぞれ回動可能に連結する複数の連結部材と、を有し、
前記一対のスライド部材のうち、
一方は、前記歯車部材と連結され、
他方は、前記連結部材と連結されることを特徴とする操作装置。 - 請求項2から請求項6のいずれか一項に記載の操作装置において、
前記押圧部材は、
直列に噛合して円弧状に配列された複数の歯車部材と、
前記複数の歯車部材のうち互いに噛合する2つの歯車部材をそれぞれ回動可能に連結する複数の連結部材と、を有し、
前記一端側終端部は、前記複数の歯車部材のうち前記押圧部材における一端側に位置する歯車部材、及び、前記複数の連結部材のうち前記押圧部材における一端側に位置する連結部材のうち一方であり、
前記他端側終端部は、前記複数の歯車部材のうち前記押圧部材における他端側に位置する歯車部材、及び、前記複数の連結部材のうち前記押圧部材における他端側に位置する連結部材のうち一方であることを特徴とする操作装置。 - 請求項7又は請求項8に記載の操作装置において、
前記複数の歯車部材は、
第1歯車部材と、
前記第1歯車部材の一端に噛合する第2歯車部材と、
前記第1歯車部材の他端に噛合する第3歯車部材と、を含み、
前記複数の連結部材は、
前記第1歯車部材及び前記第2歯車部材をそれぞれ回動可能に支持する第1連結部材と、
前記第1歯車部材及び前記第3歯車部材をそれぞれ回動可能に支持する第2連結部材と、を含み、
前記第1歯車部材は、
前記第2歯車部材と噛合する第1噛合部と、
前記第3歯車部材と噛合する第2噛合部と、
前記第1連結部材と係合して、前記第1連結部材に対する前記第1歯車部材の回動軸となる第1回動中心部と、
前記第2連結部材と係合して、前記第2連結部材に対する前記第1歯車部材の回動軸となる第2回動中心部と、を含むことを特徴とする操作装置。 - 請求項9に記載の操作装置において、
前記第1連結部材は、前記第1歯車部材に挿入される連結部材側軸部を有し、
前記第2連結部材は、連結部材側孔部を有し、
前記第1回動中心部は、前記連結部材側軸部が挿入される歯車部材側孔部であり、
前記第2回動中心部は、前記連結部材側孔部に挿入される歯車部材側軸部であることを特徴とする操作装置。 - 請求項7から請求項10のいずれか一項に記載の操作装置において、
前記複数の連結部材のそれぞれは、隣り合う連結部材と噛合する噛合部を有することを特徴とする操作装置。 - 請求項2から請求項11のいずれか一項に記載の操作装置において、
前記支持部材は、前記回動装置に設けられていることを特徴とする操作装置。 - 請求項2から請求項12のいずれか一項に記載の操作装置において、
前記回動装置は、前記押圧部材に対して前記掌側とは反対側に配置されることを特徴とする操作装置。 - 請求項1に記載の操作装置において、
前記押圧機構は、
前記掌に押圧される押圧部材と、
前記押圧部材を前記掌側に進退させる駆動装置と、を有することを特徴とする操作装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016134280A JP6810544B2 (ja) | 2016-07-06 | 2016-07-06 | 操作装置 |
| PCT/JP2017/023835 WO2018008496A1 (ja) | 2016-07-06 | 2017-06-29 | 拡縮装置及び操作装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016134280A JP6810544B2 (ja) | 2016-07-06 | 2016-07-06 | 操作装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018000735A JP2018000735A (ja) | 2018-01-11 |
| JP6810544B2 true JP6810544B2 (ja) | 2021-01-06 |
Family
ID=60912691
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016134280A Active JP6810544B2 (ja) | 2016-07-06 | 2016-07-06 | 操作装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6810544B2 (ja) |
| WO (1) | WO2018008496A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6956273B2 (ja) * | 2018-08-07 | 2021-11-02 | 株式会社ソニー・インタラクティブエンタテインメント | コントローラ装置 |
| WO2020161921A1 (ja) * | 2019-02-08 | 2020-08-13 | 株式会社ソニー・インタラクティブエンタテインメント | 巻取装置、クレードル及び装着システム |
| WO2024204530A1 (ja) * | 2023-03-29 | 2024-10-03 | 株式会社栗本鐵工所 | 情報処理システム、情報処理装置、情報処理方法及びコンピュータプログラム |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06305426A (ja) * | 1993-04-27 | 1994-11-01 | Kanto Auto Works Ltd | 握り径可変ステアリングホイール |
| JP3686686B2 (ja) * | 1993-05-11 | 2005-08-24 | 松下電器産業株式会社 | 力覚呈示デバイス、データ入力装置、及びデータ入力デバイス装置 |
| JPH0966476A (ja) * | 1995-08-29 | 1997-03-11 | Hitachi Ltd | 感触再現装置及びこれを用いたマニピュレータシステム |
| JPH11203040A (ja) * | 1998-01-16 | 1999-07-30 | Fuji Xerox Co Ltd | 触力覚呈示装置 |
| JP3851459B2 (ja) * | 1998-03-31 | 2006-11-29 | 日本電信電話株式会社 | 力覚通信端末装置 |
| US6924787B2 (en) * | 2000-04-17 | 2005-08-02 | Immersion Corporation | Interface for controlling a graphical image |
| JP2002304246A (ja) * | 2001-04-04 | 2002-10-18 | Nippon Telegr & Teleph Corp <Ntt> | 力覚提示装置及び仮想空間システム |
| JP4111278B2 (ja) * | 2003-11-20 | 2008-07-02 | 独立行政法人産業技術総合研究所 | 触力覚情報提示システム |
| JP4640009B2 (ja) * | 2005-07-15 | 2011-03-02 | 日産自動車株式会社 | 運転支援装置 |
| JP4291830B2 (ja) * | 2005-07-15 | 2009-07-08 | 株式会社エスシーエー | 形状記憶合金の機械振動を情報伝達手段とする触覚による情報伝達装置 |
| JP4818072B2 (ja) * | 2006-11-08 | 2011-11-16 | キヤノン株式会社 | 力覚提示装置及び複合現実感システム |
| JP4395572B2 (ja) * | 2007-04-13 | 2010-01-13 | 株式会社エスシーエー | 形状記憶合金の機械振動を情報伝達手段とする触覚による情報伝達装置 |
| JP2009179137A (ja) * | 2008-01-30 | 2009-08-13 | Honda Motor Co Ltd | 操舵装置の操作子 |
| NL2001425C2 (nl) * | 2008-04-01 | 2009-10-02 | Pieter Arie Jan Eikelenboom | Gelede inrichting. |
| JP2010234936A (ja) * | 2009-03-31 | 2010-10-21 | Honda Motor Co Ltd | ステアリングの補助装置 |
| CN102422244A (zh) * | 2009-05-07 | 2012-04-18 | 伊梅森公司 | 用于提供触觉反馈形状变化显示器的方法和设备 |
| US20120256821A1 (en) * | 2010-05-18 | 2012-10-11 | Seektech, Inc. | User interface devices, apparatus, and methods |
| JP5849581B2 (ja) * | 2011-10-03 | 2016-01-27 | ソニー株式会社 | 力覚提示装置 |
| TWM453754U (zh) * | 2012-12-21 | 2013-05-21 | First Dome Corp | 插組式多節轉軸結構 |
| KR101469927B1 (ko) * | 2013-03-04 | 2014-12-05 | 주식회사 세네카 | 힌지 장치 |
| US9684343B2 (en) * | 2014-06-12 | 2017-06-20 | Microsoft Technology Licensing, Llc | Radius hinge |
| TWM498254U (zh) * | 2014-09-26 | 2015-04-01 | First Dome Corp | 多節式轉軸改良結構 |
| CN105739604B (zh) * | 2014-12-08 | 2020-01-31 | 联想(北京)有限公司 | 连接件和具有连接件的电子装置 |
| JP6493914B2 (ja) * | 2015-03-13 | 2019-04-03 | 株式会社ナチュラレーザ・ワン | 多軸ヒンジ並びにこの多軸ヒンジを用いた端末機器 |
-
2016
- 2016-07-06 JP JP2016134280A patent/JP6810544B2/ja active Active
-
2017
- 2017-06-29 WO PCT/JP2017/023835 patent/WO2018008496A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018000735A (ja) | 2018-01-11 |
| WO2018008496A1 (ja) | 2018-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6810544B2 (ja) | 操作装置 | |
| US8199107B2 (en) | Input interface device with transformable form factor | |
| JP6144649B2 (ja) | 触覚フィードバックによる形状変化ディスプレイの形成方法及び装置 | |
| US7084854B1 (en) | Actuator for providing tactile sensations and device for directional tactile sensations | |
| KR102491840B1 (ko) | 조정 메커니즘을 구비한 제거가능한 입력/출력 모듈 | |
| US20140320400A1 (en) | System and method for shape deformation and force display of devices | |
| WO2014031756A2 (en) | Systems and methods for a vibrating input device | |
| JP2017221631A (ja) | ゲームコントローラ | |
| CN110096172A (zh) | 具有表面触觉感觉的用户接口装置 | |
| US20130093703A1 (en) | Tactile transmission system using glove type actuator device and method thereof | |
| WO2018059737A1 (en) | Haptic device, for interaction with virtual reality or augmented reality systems | |
| JP5263619B2 (ja) | 把持感覚提示装置 | |
| KR20200110502A (ko) | 햅틱 컨트롤러 및 이를 이용한 햅틱 피드백 제공 시스템 및 방법 | |
| CN109692471A (zh) | 一种可穿戴设备以及交互方法 | |
| KR20180025812A (ko) | 햅틱 액추에이터들의 감지된 위치 기반 구동을 포함하는 전자 디바이스 및 관련 방법들 | |
| CN107003753A (zh) | 提供实时振动反馈的振动鼠标 | |
| US20100201625A1 (en) | Wearable Computer Mouse And Electronic Device Controller | |
| CN118202321A (zh) | 控制与虚拟对象的交互 | |
| US20240168557A1 (en) | Haptic actuators and related wearable devices | |
| US11627418B1 (en) | Multilayer membranes for haptic devices | |
| JP2005292883A (ja) | 情報入力装置 | |
| CN105425989A (zh) | 一种鼠标 | |
| WO2009012267A1 (en) | Wearable computer mouse and electronic device controller | |
| JP6475590B2 (ja) | 操作装置 | |
| US11353966B1 (en) | Handheld controllers and artificial-reality systems |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190627 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200526 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200720 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200811 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201109 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20201109 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20201118 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20201124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201211 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6810544 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |