JP6800567B2 - 医用画像表示装置 - Google Patents
医用画像表示装置 Download PDFInfo
- Publication number
- JP6800567B2 JP6800567B2 JP2015173856A JP2015173856A JP6800567B2 JP 6800567 B2 JP6800567 B2 JP 6800567B2 JP 2015173856 A JP2015173856 A JP 2015173856A JP 2015173856 A JP2015173856 A JP 2015173856A JP 6800567 B2 JP6800567 B2 JP 6800567B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- endoscope
- tip
- marker
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Endoscopes (AREA)
Description
図1は、実施形態に係る医用画像表示装置1の構成を示すブロック図である。医用画像表示装置1は、ネットワークNWを介して、内視鏡装置2及びデータベース3と通信可能に接続される。
図12は、変形例に係る医用画像表示装置1の構成を示すブロック図である。この変形例に係る医用画像表示装置1は、内視鏡検査中の内視鏡22の先端EPの位置と同じ位置で撮影された過去の内視鏡画像を表示することが可能に構成される。以下、上述した実施形態と異なる内容について主に説明する。上述した実施形態と同様の内容については説明を省略する場合がある。
2 内視鏡装置
3 データベース
11 処理回路
12 記憶回路
13、21 入力回路
14 ディスプレイ
22 内視鏡
31 先端情報記憶回路
32 内視鏡画像記憶回路
33 内視鏡レポート記憶回路
111 内視鏡情報取得機能
112 画像取得機能
113 配列画像生成機能
114 関連処理機能
115 組合せ画像生成機能
116 表示制御機能
117 画像検索機能
118 レポート検索機能
221 センサ
Claims (8)
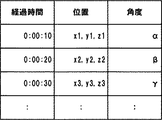
- 予め設定された座標系における所定時間ごとの内視鏡の先端の位置情報及び角度情報を取得する内視鏡情報取得部と、
前記所定時間ごとの前記内視鏡の先端の前記位置情報及び前記角度情報に基づいて、前記所定時間ごとの前記内視鏡の先端の位置及び角度を表す先端マーカを複数連ねて配列させた先端マーカ配列画像を生成する配列画像生成部と、
前記先端マーカ配列画像を表示部に表示させる表示制御部と、
前記内視鏡で撮影された画像を当該画像が撮影されたときの前記内視鏡の先端の前記座標系における前記位置情報とともに取得する画像取得部と、
組合せ画像生成部と、
を有し、
前記先端マーカの形状は、前記所定時間ごとの前記内視鏡の先端の前記角度情報に基づいて、前記先端マーカの軸が前記内視鏡の先端の方向に平行になるように生成され、
前記組合せ画像生成部は、前記座標系において前記内視鏡の先端が移動した軌跡を示す画像である前記先端マーカ配列画像の周囲に前記画像が撮影されたときの前記内視鏡の先端の前記座標系における前記位置情報に基づいて前記画像を配置した組合せ画像を生成することを特徴とする医用画像表示装置。 - 前記表示制御部は、前記組合せ画像を表示部に表示させる、
請求項1記載の医用画像表示装置。 - 前記画像が撮影された時間と前記所定時間とに基づいて、前記画像を撮影したときの前記内視鏡の先端の位置に対応する前記先端マーカを特定し、特定された前記先端マーカと前記画像とを関連付ける関連処理部を更に有し、
前記表示制御部は、前記関連処理部で関連付けた前記先端マーカと前記画像とを結び付けて表示する、
請求項2記載の医用画像表示装置。 - 前記内視鏡情報取得部は、前記内視鏡の先端の移動速度を取得し、
前記先端マーカは、さらに前記移動速度を表す
ことを特徴とする請求項1に記載の医用画像表示装置。 - 前記画像取得部は、前記画像が撮影されたときの前記内視鏡の先端の前記角度情報を更に取得し、
前記表示制御部は、前記画像取得部が取得した前記角度情報に基づいて、前記画像が撮影されたときの前記内視鏡の視線方向を表す視線マーカを前記組合せ画像に重畳表示することを特徴とする請求項2に記載の医用画像表示装置。 - 内視鏡検査中の前記位置情報と過去の内視鏡検査の前記画像に付帯する前記位置情報とに基づいて、撮影中の前記内視鏡の位置で過去に撮影された前記画像を検索する画像検索部をさらに有し、
前記表示制御部は、検索された前記画像を表示する
ことを特徴とする請求項2に記載の医用画像表示装置。 - 検索された前記画像に基づいて、該画像が用いられた過去の内視鏡レポートを検索するレポート検索部をさらに有し、
前記表示制御部はさらに検索された前記内視鏡レポートを表示する
ことを特徴とする請求項6に記載の医用画像表示装置。 - 前記先端マーカ配列画像は、前記内視鏡で撮影された前記画像を読影するとき、又は読影レポートを作成するときに表示されることを特徴とする請求項2に記載の医用画像表示装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015173856A JP6800567B2 (ja) | 2015-09-03 | 2015-09-03 | 医用画像表示装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015173856A JP6800567B2 (ja) | 2015-09-03 | 2015-09-03 | 医用画像表示装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017047009A JP2017047009A (ja) | 2017-03-09 |
| JP6800567B2 true JP6800567B2 (ja) | 2020-12-16 |
Family
ID=58280795
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015173856A Active JP6800567B2 (ja) | 2015-09-03 | 2015-09-03 | 医用画像表示装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6800567B2 (ja) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003093326A (ja) * | 2001-09-25 | 2003-04-02 | Pentax Corp | 可撓性電子内視鏡装置 |
| US20070060798A1 (en) * | 2005-09-15 | 2007-03-15 | Hagai Krupnik | System and method for presentation of data streams |
| KR100868339B1 (ko) * | 2007-11-15 | 2008-11-12 | 주식회사 인트로메딕 | 의료용 영상 데이터의 디스플레이 방법과 의료용 영상데이터를 이용한 캡쳐 영상 제공 시스템 및 그 방법 |
| JP5504028B2 (ja) * | 2010-03-29 | 2014-05-28 | 富士フイルム株式会社 | 観察支援システムおよび方法並びにプログラム |
| JP6128796B2 (ja) * | 2012-10-25 | 2017-05-17 | オリンパス株式会社 | 挿入システム、挿入支援装置、挿入支援装置の作動方法及びプログラム |
| WO2014141968A1 (ja) * | 2013-03-12 | 2014-09-18 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
-
2015
- 2015-09-03 JP JP2015173856A patent/JP6800567B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017047009A (ja) | 2017-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11992372B2 (en) | Cooperative surgical displays | |
| US11748924B2 (en) | Tiered system display control based on capacity and user operation | |
| JP3847744B2 (ja) | 挿入支援システム | |
| JP3820244B2 (ja) | 挿入支援システム | |
| KR101599129B1 (ko) | 내시경 상 보이는 병변의 크기 측정 방법 및 컴퓨터 판독 가능한 기록매체 | |
| WO2022070077A1 (en) | Interactive information overlay on multiple surgical displays | |
| JP4616872B2 (ja) | 画像表示装置および画像表示プログラム | |
| US20130296682A1 (en) | Integrating pre-surgical and surgical images | |
| JPWO2020110278A1 (ja) | 情報処理システム、内視鏡システム、学習済みモデル、情報記憶媒体及び情報処理方法 | |
| JP2017153818A5 (ja) | ||
| JP2010264232A (ja) | 診断支援装置、診断支援プログラムおよび診断支援方法 | |
| JP2010094185A (ja) | 画像表示装置 | |
| JP6026982B2 (ja) | 画像表示制御装置およびその作動方法並びに画像表示制御プログラム | |
| JP5215483B1 (ja) | 医用画像処理装置 | |
| JP7189355B2 (ja) | コンピュータプログラム、内視鏡用プロセッサ、及び情報処理方法 | |
| JP2009082464A (ja) | 画像表示装置および画像表示プログラム | |
| JP5613353B2 (ja) | 医療装置 | |
| JP6800567B2 (ja) | 医用画像表示装置 | |
| JP2005131317A (ja) | 挿入支援システム | |
| JP2006255193A (ja) | 内視鏡挿入支援装置 | |
| US20220409300A1 (en) | Systems and methods for providing surgical assistance based on operational context | |
| US20220409324A1 (en) | Systems and methods for telestration with spatial memory | |
| JP4573517B2 (ja) | 挿入支援システム | |
| US20150121276A1 (en) | Method of displaying multi medical image and medical image equipment for performing the same | |
| JP4160487B2 (ja) | 挿入支援システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20160527 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180726 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190625 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190823 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200302 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200302 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200309 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20200310 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20200410 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20200414 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20200511 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20200609 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200616 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200630 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20200923 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20201027 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20201027 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6800567 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |