JP6773040B2 - 情報処理システム、および情報処理システムの情報処理方法、情報処理装置、並びにプログラム - Google Patents
情報処理システム、および情報処理システムの情報処理方法、情報処理装置、並びにプログラム Download PDFInfo
- Publication number
- JP6773040B2 JP6773040B2 JP2017543148A JP2017543148A JP6773040B2 JP 6773040 B2 JP6773040 B2 JP 6773040B2 JP 2017543148 A JP2017543148 A JP 2017543148A JP 2017543148 A JP2017543148 A JP 2017543148A JP 6773040 B2 JP6773040 B2 JP 6773040B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- function
- driver
- learning
- verification
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000010365 information processing Effects 0.000 title claims description 35
- 238000003672 processing method Methods 0.000 title claims description 6
- 230000006870 function Effects 0.000 claims description 362
- 238000012795 verification Methods 0.000 claims description 232
- 230000033001 locomotion Effects 0.000 claims description 138
- 238000004891 communication Methods 0.000 claims description 50
- 238000004088 simulation Methods 0.000 claims description 37
- 230000004044 response Effects 0.000 claims description 5
- 238000000034 method Methods 0.000 description 161
- 230000008569 process Effects 0.000 description 154
- 238000001514 detection method Methods 0.000 description 125
- 238000012545 processing Methods 0.000 description 99
- 230000009471 action Effects 0.000 description 70
- 238000012937 correction Methods 0.000 description 46
- 238000004364 calculation method Methods 0.000 description 24
- 230000006399 behavior Effects 0.000 description 21
- 238000003384 imaging method Methods 0.000 description 21
- 230000001133 acceleration Effects 0.000 description 20
- 230000007613 environmental effect Effects 0.000 description 20
- 238000012986 modification Methods 0.000 description 12
- 230000004048 modification Effects 0.000 description 12
- 230000010391 action planning Effects 0.000 description 11
- 230000008859 change Effects 0.000 description 10
- 238000012821 model calculation Methods 0.000 description 10
- 238000005259 measurement Methods 0.000 description 7
- 239000008280 blood Substances 0.000 description 6
- 210000004369 blood Anatomy 0.000 description 6
- 230000036651 mood Effects 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 230000011514 reflex Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000008451 emotion Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 239000000284 extract Substances 0.000 description 4
- 244000205754 Colocasia esculenta Species 0.000 description 3
- 235000006481 Colocasia esculenta Nutrition 0.000 description 3
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 3
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 238000004590 computer program Methods 0.000 description 3
- 238000010276 construction Methods 0.000 description 3
- 238000013135 deep learning Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 229910052760 oxygen Inorganic materials 0.000 description 3
- 239000001301 oxygen Substances 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 230000005236 sound signal Effects 0.000 description 3
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 2
- 240000004050 Pentaglottis sempervirens Species 0.000 description 2
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 2
- 230000037007 arousal Effects 0.000 description 2
- 238000013528 artificial neural network Methods 0.000 description 2
- 230000003542 behavioural effect Effects 0.000 description 2
- 230000036772 blood pressure Effects 0.000 description 2
- 230000036760 body temperature Effects 0.000 description 2
- 210000004556 brain Anatomy 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 239000008103 glucose Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000002040 relaxant effect Effects 0.000 description 2
- 230000003252 repetitive effect Effects 0.000 description 2
- 238000010129 solution processing Methods 0.000 description 2
- 206010006326 Breath odour Diseases 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 230000010267 cellular communication Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000008094 contradictory effect Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 230000001976 improved effect Effects 0.000 description 1
- 230000009191 jumping Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 230000006996 mental state Effects 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 230000002207 retinal effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
Images



























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0098—Details of control systems ensuring comfort, safety or stability not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/085—Changing the parameters of the control units, e.g. changing limit values, working points by control input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0013—Planning or execution of driving tasks specially adapted for occupant comfort
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
- B60W60/0016—Planning or execution of driving tasks specially adapted for safety of the vehicle or its occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/043—Identity of occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/047—Prioritizing desires of multiple occupants, e.g. when setting climate control or driving behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/21—Voice
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/221—Physiology, e.g. weight, heartbeat, health or special needs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/229—Attention level, e.g. attentive to driving, reading or sleeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
Description
本開示の第2の側面の情報処理装置は、運転者の運転操作に係る運転操作情報と、検出された移動装置の状態とに基づいて、学習モデルによって、前記運転者の前記運転操作に係る個人化関数を学習する学習部と、ネットワークを介して、外部の検証装置に、前記個人化関数を用いて、前記移動装置がシミュレーション走行された、前記シミュレーション走行の結果に基づいた、前記個人化関数の安全性を検証させるための前記個人化関数を通信する通信部とを含む情報処理装置である。
本開示の第2の側面においては、運転者の運転操作に係る運転操作情報と、検出された移動装置の状態とに基づいて、学習モデルによって、前記運転者の前記運転操作に係る個人化関数が学習され、ネットワークを介して、外部の検証装置に、前記個人化関数を用いて、前記移動装置がシミュレーション走行された、前記シミュレーション走行の結果に基づいた、前記個人化関数の安全性を検証させるための前記個人化関数が通信される。
本開示の第3の側面の情報処理装置は、運転者の運転操作に係る運転操作情報と、検出された移動装置の状態とに基づいて、学習モデルによって、前記運転者の前記運転操作に係る個人化関数を学習する学習部と、前記個人化関数を用いて、前記移動装置のシミュレーション走行を実行し、前記シミュレーション走行の結果に基づいて、前記個人化関数の安全性を検証する検証部とを含む情報処理装置である。
本開示の第3の側面においては、運転者の運転操作に係る運転操作情報と、検出された移動装置の状態とに基づいて、学習モデルによって、前記運転者の前記運転操作に係る個人化関数が学習され、前記個人化関数が用いられて、前記移動装置のシミュレーション走行が実行され、前記シミュレーション走行の結果に基づいて、前記個人化関数の安全性が検証される。
1.本開示の実施の形態
2.第1の変形例
3.第2の変形例
4.第1の応用例
5.第2の応用例
<運転制御装置の構成例>
図1は、本開示を適用した自動車の運転制御装置の一実施の形態の構成例を示すブロック図である。
次に、図2のフローチャートを参照して、図1の運転制御装置11における運転制御処理について説明する。尚、通常、運転モードは、自動運転モード、または、手動運転モードのいずれかに設定されているが、ここでは、デフォルトで手動運転モードが設定されているものとし、運転が開始された後、自動運転モードにも切り替えられるものとする。また、デフォルトの運転モードは、自動運転モード、および、手動運転モードのいずれであってもよく、自由に設定できるようにしてもよい。
次に、図4のフローチャートを参照して、図1の運転制御装置11による自動運転処理について説明する。
ここで、図5のフローチャートを参照して、熟考動作決定処理について説明する。
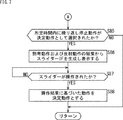
次に、図6,図7のフローチャートを参照して、競合解決処理について説明する。
ここで、図9のフローチャートを参照して、運転者介入処理について説明する。
以上においては、競合が発生した場合、予め設定された解決モードに応じて、反射動作と熟考動作とを利用して競合を解決する例について説明してきた。しかしながら、競合の発生そのものを抑制することで、運転制御処理を、よりスムーズなものとすることができる。
次に、図13のフローチャートを参照して、手動運転処理について説明する。
ここで、個人化関数の学習について説明する。
次に、図14のフローチャートを参照して、個人化関数更新処理について説明する。
次に、図15のブロック図を参照して、検証装置13の構成例について説明する。
次に、図17のフローチャートを参照して、図15の検証装置13による検証処理について説明する。
以上においては、検証処理において求められた検証結果だけを検証装置13から運転制御装置11に供給する例について説明してきたが、検証結果に加えて、シミュレーションなどで事故が発生しまったような失敗データや、事故を回避可能な正解データを併せて運転制御装置11に供給するようにしてもよい。このようにすることで、運転制御装置11においては、失敗データや正解データのフィードバックを受けて、再学習を実現することが可能となる。
次に、図18のブロックを参照して、検証結果に加えて、失敗データおよび正解データを併せて運転制御装置11に供給するようにした検証装置13の構成例について説明する。尚、図18において、図15の検証装置13と同一の機能を備えた構成については、同一の名称、および同一の符号を付しており、その説明は省略するものとする。すなわち、図18の検証装置13において、図15の検証装置13と異なる点は、検証部190に代えて、検証部201を設けた点である。
次に、図19を参照して、検証装置13から、検証結果に加えて、失敗データおよび正解データを受信する運転制御装置11の構成例について説明する。尚、図19において、図1の運転制御装置11と同一の機能を備えた構成については、同一の名称、および同一の符号を付しており、その説明は省略するものとする。
ここで、図20のフローチャートを参照して、検証結果に加えて、失敗データおよび正解データを運転制御装置11に送信する図18の検証装置13による検証処理について説明する。尚、図20のステップS201乃至S215,S217の処理については、図17のステップS161乃至S176と同様の処理であるので、その説明は省略するものとする。
次に、図21のフローチャートを参照して、検証結果と共に、失敗データおよび正解データが送信されてくる、図19の運転制御装置11における個人化関数更新処理について説明する。尚、図19におけるステップS241,S242,S244、およびS245の処理は、図14におけるステップS141、S142、S144、およびS145の処理と同様であるので、その説明は適宜省略するものとする。
以上においては、検証結果に加えて、失敗データおよび正解データを運転制御装置11に送信させる検証装置13の例について説明してきたが、個人化関数に問題がある場合、検証装置13において、シミュレーションにより再訓練し、矯正した個人化関数を矯正関数として運転制御装置11に戻すことで個人化関数の更新を行い易くするようにしてもよい。このようにすることで、運転制御装置11においては、学習において完全な個人化関数が完成できない状態でも、矯正関数を受け取り、更新を早期に実現することが可能となる。
次に、図22のブロックを参照して、検証結果に問題があった場合の個人化関数を再訓練により矯正した矯正関数を生成し、検証結果に加えて、失敗データおよび正解データ、並びに、矯正関数を併せて運転制御装置11に供給するようにした検証装置13の構成例について説明する。尚、図22において、図18の検証装置13と同一の機能を備えた構成については、同一の名称、および同一の符号を付しており、その説明は省略するものとする。
次に、図23を参照して、検証装置13から、検証結果に加えて、失敗データおよび正解データ、並びに、矯正関数を受信する運転制御装置11の構成例について説明する。尚、図23において、図19の運転制御装置11と同一の機能を備えた構成については、同一の名称、および同一の符号を付しており、その説明は省略するものとする。
ここで、図24のフローチャートを参照して、検証結果に問題がある場合、再訓練により個人化関数を矯正した矯正関数を生成するときの検証処理について説明する。尚、図20のステップS261乃至S275,S277の処理については、図17のステップS161乃至S176と同様の処理であるので、その説明は省略するものとする。
次に、図25のフローチャートを参照して、検証結果と共に、失敗データおよび矯正関数が送信されてくるときの運転制御装置11における個人化関数更新処理について説明する。尚、図21におけるステップS301,S302,S304、およびS305の処理は、図14におけるステップS141、S142、S144、およびS145の処理と同様であるので、その説明は適宜省略するものとする。
本開示に係る技術は、様々な製品へ応用することができる。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車などのいずれかの種類の自動車に搭載される装置として実現されてもよい。
<ソフトウェアにより実行させる例>
ところで、上述した一連の処理は、ハードウェアにより実行させることもできるが、ソフトウェアにより実行させることもできる。一連の処理をソフトウェアにより実行させる場合には、そのソフトウェアを構成するプログラムが、専用のハードウェアに組み込まれているコンピュータ、または、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどに、記録媒体からインストールされる。
<1> 移動体を運転する運転者の運転操作の入力を受け付ける操作部と、
前記移動体の状態を検出する検出部と、
前記運転操作に係る操作情報と、前記検出部の検出結果に基づいて、前記運転者の前記運転操作に係る個人化関数を学習する学習部と、
前記検出結果、および、前記個人化関数に基づいて、前記移動体の動作を制御する動作制御部とを含む
運転制御装置。
<2> ネットワークを介して、外部の検証装置に、前記学習部により学習された個人化関数の検証を要求し、検証結果を取得する検証部をさらに含む
<1>に記載の運転制御装置。
<3> 前記学習部により学習された個人化関数を記憶する学習結果記憶部をさらに含み、
前記移動体の運転モードは、前記運転者により受け付けられた運転操作の入力に応じて動作する手動運転モードと、前記検出結果、および、前記検証部により検証された前記個人化関数に基づいて、前記運転者による運転操作を必要とせずに動作する自動運転モードとを含み、
前記学習部は、前記手動運転モードにおいて、前記運転操作に係る操作情報と、前記検出部の検出結果に基づいて、前記運転者の前記運転操作に係る個人化関数を学習し、前記学習結果記憶部は、前記学習結果となる個人化関数を記憶する
<2>に記載の運転制御装置。
<4> 前記検証部が取得する検証結果は、前記外部の検証装置により、前記学習結果記憶部に記憶された個人化関数が用いられて、前記自動運転モードでシミュレーション走行させた結果である
<3>に記載の運転制御装置。
<5> 前記検証部が取得した検証結果に異常がない前記個人化関数を記憶する個人化関数記憶部と、
前記学習結果記憶部に記憶された前記個人化関数のうち、前記検証部により前記異常のないことが検証された前記個人化関数を、前記学習結果記憶部に記憶された前記個人化関数として更新する更新部とをさらに含む
<4>に記載の運転制御装置。
<6> 前記動作制御部は、前記自動運転モードにおいて、前記検出結果、および、前記個人化関数記憶部に記憶されている、前記検証部により検証された前記個人化関数に基づいて、前記移動体の動作を制御する
<5>に記載の運転制御装置。
<7> 前記学習結果記憶部、および前記個人化関数記憶部は、前記個人化関数を前記運転者毎で記憶する
<5>に記載の運転制御装置。
<8> 前記学習結果記憶部、および前記個人化関数記憶部は、前記個人化関数を前記運転者毎に個別で、かつ、前記運転者毎に設定される複数のモード毎に記憶する
<7>に記載の運転制御装置。
<9> 前記動作制御部は、前記運転者を認証し、
前記学習部は、前記動作制御部により認証された運転者毎に、前記個人化関数を学習し、前記学習結果記憶部に記憶させる
<8>に記載の運転制御装置。
<10> 前記動作制御部は、前記運転者を認証し、前記認証した運転者の、前記検証部により検証された前記個人化関数を前記個人化関数記憶部より読み出し、前記検出結果、および、前記検証部により検証された前記個人化関数に基づいて、前記移動体の動作を制御する
<8>に記載の運転制御装置。
<11> 移動体を運転する運転者の運転操作の入力を受け付け、
前記移動体の状態を検出し、
前記運転操作に係る操作情報と、前記検出部の検出結果に基づいて、前記運転者の前記運転操作に係る個人化関数を学習し、
前記検出結果、および、前記個人化関数に基づいて、前記移動体の動作を制御するステップを含む
運転制御方法。
<12> 移動体を運転する運転者の運転操作の入力を受け付ける操作部と、
前記移動体の状態を検出する検出部と、
前記運転操作に係る操作情報と、前記検出部の検出結果に基づいて、前記運転者の前記運転操作に係る個人化関数を学習する学習部と、
前記検出結果、および、前記個人化関数に基づいて、前記移動体の動作を制御する動作制御部としてコンピュータを機能させる
プログラム。
Claims (13)
- 運転者の運転操作に係る運転操作情報と、検出された移動装置の状態とに基づいて、学習モデルによって、前記運転者の前記運転操作に係る個人化関数を学習する学習部と、
前記個人化関数を用いて、前記移動装置のシミュレーション走行を実行し、前記シミュレーション走行の結果に基づいて、前記個人化関数の安全性を検証する検証部とを含む
情報処理システム。 - 前記学習部により学習された個人化関数を記憶する学習結果記憶部をさらに含み、
前記移動装置の運転モードは、前記運転者により受け付けられた運転操作の入力に応じて動作する手動運転モードと、検出された前記移動装置の状態、および、前記検証部により前記安全性が検証された前記個人化関数に基づいて、前記運転者による運転操作を必要とせずに動作する自動運転モードとを含み、
前記学習部は、前記手動運転モードにおいて、前記運転操作に係る前記運転操作情報と、検出された前記移動装置の状態とに基づいた、前記学習モデルによって、前記運転者の前記運転操作に係る個人化関数を学習し、前記学習結果記憶部は、前記学習部の学習結果となる前記個人化関数を記憶する
請求項1に記載の情報処理システム。 - 前記検証部は、前記学習結果記憶部に記憶された前記個人化関数を用いて、前記自動運転モードで前記移動装置のシミュレーション走行を実行し、前記シミュレーション走行の結果に基づく、前記個人化関数の安全性を検証する
請求項2に記載の情報処理システム。 - 前記検証部により前記安全性が検証された前記個人化関数を記憶する個人化関数記憶部と、
前記学習結果記憶部に記憶された前記個人化関数のうち、前記検証部により前記安全性が検証された前記個人化関数を、前記個人化関数記憶部に記憶された前記個人化関数として更新する更新部とをさらに含む
請求項3に記載の情報処理システム。 - 前記自動運転モードにおいて、検出された前記移動装置の状態、および、前記個人化関数記憶部に記憶されている、前記検証部により前記安全性が検証された前記個人化関数に基づいて、前記移動装置の動作を制御する動作制御部をさらに含む
請求項4に記載の情報処理システム。 - 前記学習結果記憶部、および前記個人化関数記憶部は、前記個人化関数を前記運転者毎で記憶する
請求項4に記載の情報処理システム。 - 前記学習結果記憶部、および前記個人化関数記憶部は、前記個人化関数を前記運転者毎に個別で、かつ、前記運転者毎に設定される複数のモード毎に記憶する
請求項6に記載の情報処理システム。 - 前記動作制御部は、前記運転者を認証し、
前記学習部は、前記動作制御部により認証された運転者毎に、前記個人化関数を学習し、前記学習結果記憶部に記憶させる
請求項7に記載の情報処理システム。 - 前記動作制御部は、前記運転者を認証し、前記認証した運転者の、前記検証部により前記安全性が検証された前記個人化関数を前記個人化関数記憶部より読み出し、検出された前記移動装置の状態、および、前記検証部により前記安全性が検証された前記個人化関数に基づいて、前記移動装置の動作を制御する
請求項7に記載の情報処理システム。 - 運転者の運転操作に係る運転操作情報と、検出された移動装置の状態とに基づいて、学習モデルによって、前記運転者の前記運転操作に係る個人化関数を学習し、
前記個人化関数を用いて、前記移動装置のシミュレーション走行を実行し、前記シミュレーション走行の結果に基づいて、前記個人化関数の安全性を検証するステップを含む
情報処理システムの情報処理方法。 - 運転者の運転操作に係る運転操作情報と、検出された移動装置の状態とに基づいて、学習モデルによって、前記運転者の前記運転操作に係る個人化関数を学習する学習部と、
前記個人化関数を用いて、前記移動装置のシミュレーション走行を実行し、前記シミュレーション走行の結果に基づいて、前記個人化関数の安全性を検証する検証部としてコンピュータを機能させる
プログラム。 - 運転者の運転操作に係る運転操作情報と、検出された移動装置の状態とに基づいて、学習モデルによって、前記運転者の前記運転操作に係る個人化関数を学習する学習部と、
ネットワークを介して、外部の検証装置に、前記個人化関数を用いて、前記移動装置がシミュレーション走行された、前記シミュレーション走行の結果に基づいた、前記個人化関数の安全性を検証させるための前記個人化関数を通信する通信部とを含む
情報処理装置。 - 運転者の運転操作に係る運転操作情報と、検出された移動装置の状態とに基づいて、学習モデルによって、前記運転者の前記運転操作に係る個人化関数を学習する学習部と、
前記個人化関数を用いて、前記移動装置のシミュレーション走行を実行し、前記シミュレーション走行の結果に基づいて、前記個人化関数の安全性を検証する検証部とを含む
情報処理装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015194556 | 2015-09-30 | ||
| JP2015194556 | 2015-09-30 | ||
| PCT/JP2016/077433 WO2017057060A1 (ja) | 2015-09-30 | 2016-09-16 | 運転制御装置、および運転制御方法、並びにプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017057060A1 JPWO2017057060A1 (ja) | 2018-08-09 |
| JP6773040B2 true JP6773040B2 (ja) | 2020-10-21 |
Family
ID=58427495
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017543148A Active JP6773040B2 (ja) | 2015-09-30 | 2016-09-16 | 情報処理システム、および情報処理システムの情報処理方法、情報処理装置、並びにプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11281211B2 (ja) |
| EP (1) | EP3357780B1 (ja) |
| JP (1) | JP6773040B2 (ja) |
| CN (1) | CN108137052B (ja) |
| WO (1) | WO2017057060A1 (ja) |
Families Citing this family (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107207010B (zh) * | 2015-03-31 | 2019-10-18 | 日立汽车系统株式会社 | 自动驾驶控制装置 |
| US10782687B2 (en) | 2015-09-30 | 2020-09-22 | Sony Corporation | Driving control apparatus, driving control method, and program |
| CA3025643C (en) * | 2016-05-27 | 2019-07-09 | Nissan Motor Co., Ltd. | Driving control method and driving control apparatus |
| JP6827197B2 (ja) * | 2016-07-22 | 2021-02-10 | パナソニックIpマネジメント株式会社 | 情報推定システム及び情報推定方法 |
| BR112019002546B1 (pt) * | 2016-08-08 | 2023-01-17 | Nissan Motor Co., Ltd | Método de controle e dispositivo de controle de veículo de direção automática |
| US11119480B2 (en) | 2016-10-20 | 2021-09-14 | Magna Electronics Inc. | Vehicle control system that learns different driving characteristics |
| JP6702217B2 (ja) * | 2017-02-06 | 2020-05-27 | 株式会社デンソー | 自動運転装置 |
| CN110475702B (zh) * | 2017-02-22 | 2022-08-16 | 加特可株式会社 | 车辆控制装置及车辆控制方法 |
| CA3064523C (en) * | 2017-05-25 | 2023-04-04 | Nissan Motor Co., Ltd. | Parking control method and parking control apparatus |
| DE102017208971A1 (de) * | 2017-05-29 | 2018-11-29 | Volkswagen Aktiengesellschaft | Verfahren und vorrichtung zur unterstützung eines in einem fahrzeug befindlichen fahrzeuginsassen |
| CN109109784A (zh) * | 2017-06-22 | 2019-01-01 | 吴俊逸 | 根据用户行为而提供车辆剩余行驶信息的系统及其方法 |
| US10571919B2 (en) * | 2017-07-26 | 2020-02-25 | Lenovo (Singapore) Pte. Ltd. | Systems and methods to identify directions based on use of autonomous vehicle function |
| CA3071604C (en) * | 2017-08-10 | 2023-09-26 | Nissan Motor Co., Ltd. | Parking control method and parking control device |
| WO2019030923A1 (ja) * | 2017-08-10 | 2019-02-14 | 日産自動車株式会社 | 駐車制御方法及び駐車制御装置 |
| CN107491073B (zh) * | 2017-09-05 | 2021-04-02 | 百度在线网络技术(北京)有限公司 | 无人驾驶车辆的数据训练方法和装置 |
| US10496098B2 (en) * | 2017-09-12 | 2019-12-03 | Baidu Usa Llc | Road segment-based routing guidance system for autonomous driving vehicles |
| EP3686863A4 (en) * | 2017-09-20 | 2020-10-28 | Nissan Motor Co., Ltd. | METHOD OF LEARNING DRIVING SKILLS AND DRIVING ASSISTANT DEVICE |
| US20200278685A1 (en) * | 2017-09-20 | 2020-09-03 | Nissan Motor Co., Ltd. | Travel Assistance Method and Travel Assistance Device |
| US11180154B2 (en) * | 2017-10-17 | 2021-11-23 | The Regents Of The University Of Michigan | Fingerprinting drivers based on vehicle turns |
| WO2019080975A1 (de) | 2017-10-27 | 2019-05-02 | Continental Teves Ag & Co. Ohg | Verfahren zum steuern eines parkvorgangs |
| US11130497B2 (en) * | 2017-12-18 | 2021-09-28 | Plusai Limited | Method and system for ensemble vehicle control prediction in autonomous driving vehicles |
| US11273836B2 (en) | 2017-12-18 | 2022-03-15 | Plusai, Inc. | Method and system for human-like driving lane planning in autonomous driving vehicles |
| US20190185012A1 (en) | 2017-12-18 | 2019-06-20 | PlusAI Corp | Method and system for personalized motion planning in autonomous driving vehicles |
| US11048832B2 (en) * | 2018-01-12 | 2021-06-29 | Intel Corporation | Simulated vehicle operation modeling with real vehicle profiles |
| JP6629892B2 (ja) * | 2018-02-02 | 2020-01-15 | 本田技研工業株式会社 | 制御装置 |
| US10710607B2 (en) | 2018-02-12 | 2020-07-14 | Lenovo (Singapore) Pte. Ltd. | Systems and methods for identifying first route to destination as involving less human driving of vehicle than second route to destination |
| WO2019167457A1 (ja) * | 2018-02-28 | 2019-09-06 | ソニー株式会社 | 情報処理装置、情報処理方法、プログラム、及び移動体 |
| US20190265717A1 (en) * | 2018-02-28 | 2019-08-29 | Walmart Apollo, Llc | System and method for remotely receiving deliveries using an autonomous wagon |
| US10843689B2 (en) * | 2018-06-13 | 2020-11-24 | Toyota Jidosha Kabushiki Kaisha | Collision avoidance for a connected vehicle based on a digital behavioral twin |
| CN108819951B (zh) * | 2018-07-27 | 2020-11-17 | 重庆大学 | 一种考虑驾驶员驾驶技能的人机共驾横向驾驶权分配方法 |
| US10906553B2 (en) * | 2018-07-30 | 2021-02-02 | Toyota Motor Engineering & Manufactuiring North America, Inc. | Systems and methods for vehicle acceleration event prediction inhibit |
| US10752258B2 (en) * | 2018-09-17 | 2020-08-25 | GM Global Technology Operations LLC | Apparatus and method for audible driver confirmation for maneuvers in an autonomous vehicle |
| US11036370B2 (en) | 2018-09-25 | 2021-06-15 | Intel Corporation | Computer-assisted or autonomous driving vehicles social network |
| KR102587094B1 (ko) * | 2018-12-04 | 2023-10-11 | 현대자동차주식회사 | 운전자의 주행 성향 판단 장치 및 방법 |
| CN109902562B (zh) * | 2019-01-16 | 2022-07-01 | 重庆邮电大学 | 一种基于强化学习的驾驶员异常姿态监测方法 |
| KR102103450B1 (ko) * | 2019-01-30 | 2020-04-22 | 한국기술교육대학교 산학협력단 | 분산 시뮬레이션 기반 첨단 운전자 지원 시스템 |
| AT521718A1 (de) * | 2019-02-14 | 2020-04-15 | Avl List Gmbh | Verfahren zur Steuerung eines Fahrzeugs |
| CN109808694B (zh) * | 2019-02-28 | 2020-06-09 | 北京航空航天大学 | 一种车辆控制方法及装置 |
| CN110058588B (zh) * | 2019-03-19 | 2021-07-02 | 驭势科技(北京)有限公司 | 一种自动驾驶系统升级的方法、自动驾驶系统及车载设备 |
| CN110069064B (zh) * | 2019-03-19 | 2021-01-29 | 驭势科技(北京)有限公司 | 一种自动驾驶系统升级的方法、自动驾驶系统及车载设备 |
| JP7232094B2 (ja) | 2019-03-25 | 2023-03-02 | 株式会社Subaru | 車両の制御装置、車両の制御方法及びプログラム |
| KR20200135630A (ko) * | 2019-05-23 | 2020-12-03 | 현대자동차주식회사 | 자율 주행 차량의 제어장치 및 그 방법 |
| US20210019180A1 (en) * | 2019-07-19 | 2021-01-21 | Toyota Research Institute, Inc. | Methods and systems for performing tasks based on a global model |
| KR20190098735A (ko) * | 2019-08-01 | 2019-08-22 | 엘지전자 주식회사 | 차량 단말 및 그의 동작 방법 |
| US11420645B2 (en) * | 2019-12-11 | 2022-08-23 | At&T Intellectual Property I, L.P. | Method and apparatus for personalizing autonomous transportation |
| JP2023525088A (ja) * | 2020-05-09 | 2023-06-14 | 華為技術有限公司 | 自動運転システムを適応的に最適化するための方法および装置 |
| JP7409222B2 (ja) * | 2020-05-14 | 2024-01-09 | マツダ株式会社 | 移動体の制御装置 |
| CN115996869A (zh) * | 2020-07-03 | 2023-04-21 | 索尼集团公司 | 信息处理装置、信息处理方法、信息处理系统和程序 |
| WO2022040399A1 (en) * | 2020-08-19 | 2022-02-24 | Cornell University | Simulation-based optimization framework for controlling electric vehicles |
| CN112477872B (zh) * | 2020-11-26 | 2022-05-27 | 中国第一汽车股份有限公司 | 一种参数标定方法、装置、设备及存储介质 |
| US11563241B2 (en) * | 2021-02-10 | 2023-01-24 | Dennis Palatov | Apparatus and methods for removable battery module with internal relay and internal controller |
| AT526003A2 (de) * | 2022-03-28 | 2023-10-15 | Schmidt Dipl Ing Eugen | Ein Fahrerasssistenzsystem als „virtuelle KopilotIn“, das Hilfestellung angepasst an die Fähigkeiten und Charaktermerkmale der FahrerIn leistet und kommuniziert |
| DE102022203954A1 (de) | 2022-04-25 | 2023-10-26 | Volkswagen Aktiengesellschaft | Verfahren und Informationsvorrichtung zum Informieren eines Nutzers eines Fahrzeugs mit einem Fahrerassistenzsystem in Bezug auf eine Aktion des Fahrerassistenzsystems |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07108849A (ja) | 1993-10-13 | 1995-04-25 | Hitachi Ltd | 車の自動走行制御装置 |
| DE19916808A1 (de) | 1999-04-14 | 2000-11-02 | Bayerische Motoren Werke Ag | Verfahren zur Erstellung oder Änderung eines individuellen Fahrprogramms |
| JP2002195063A (ja) * | 2000-12-22 | 2002-07-10 | Toyota Motor Corp | 運転支援装置 |
| JP2006349003A (ja) * | 2005-06-14 | 2006-12-28 | Aisin Aw Co Ltd | 車両制御装置及び車両制御方法 |
| JP4952268B2 (ja) * | 2007-01-24 | 2012-06-13 | トヨタ自動車株式会社 | 走行制御計画生成装置 |
| JP4985103B2 (ja) | 2007-05-28 | 2012-07-25 | トヨタ自動車株式会社 | 車両の自動運転装置 |
| JP5063637B2 (ja) | 2009-03-24 | 2012-10-31 | 日立オートモティブシステムズ株式会社 | 車両運転支援装置 |
| DE102009050399A1 (de) | 2009-10-22 | 2011-05-05 | Audi Ag | Verfahren zur Steuerung des Betriebs eines vollautomatischen, zur unabhängigen Fahrzeugführung ausgebildeten Fahrerassistenzsystems eines Kraftfahrzeugs und Kraftfahrzeug |
| US8509982B2 (en) | 2010-10-05 | 2013-08-13 | Google Inc. | Zone driving |
| DE102010061829A1 (de) | 2010-11-24 | 2012-05-24 | Continental Teves Ag & Co. Ohg | Verfahren und Abstandskontrolleinrichtung zur Vermeidung von Kollisionen eines Kraftfahrzeugs in einer Fahrsituation mit geringem Seitenabstand |
| US8527199B1 (en) * | 2012-05-17 | 2013-09-03 | Google Inc. | Automatic collection of quality control statistics for maps used in autonomous driving |
| WO2014076759A1 (ja) | 2012-11-13 | 2014-05-22 | トヨタ自動車 株式会社 | 運転支援装置及び運転支援方法 |
| JP6056682B2 (ja) | 2013-06-27 | 2017-01-11 | 株式会社デンソー | 車両用情報提供装置 |
| JP2015058902A (ja) | 2013-09-20 | 2015-03-30 | 富士重工業株式会社 | 車両の走行制御装置 |
| JP2015089801A (ja) * | 2013-11-07 | 2015-05-11 | 株式会社デンソー | 運転制御装置 |
| US20150166069A1 (en) | 2013-12-18 | 2015-06-18 | Ford Global Technologies, Llc | Autonomous driving style learning |
| KR20150076627A (ko) | 2013-12-27 | 2015-07-07 | 한국전자통신연구원 | 차량 운전 학습 시스템 및 방법 |
| US9349284B2 (en) | 2014-04-24 | 2016-05-24 | International Business Machines Corporation | Regional driving trend modification using autonomous vehicles |
| KR102051142B1 (ko) | 2014-06-13 | 2019-12-02 | 현대모비스 주식회사 | 차량용 운전자 위험 지수 관리 시스템 및 그 방법 |
| US9766625B2 (en) * | 2014-07-25 | 2017-09-19 | Here Global B.V. | Personalized driving of autonomously driven vehicles |
| CN104590274A (zh) * | 2014-11-26 | 2015-05-06 | 浙江吉利汽车研究院有限公司 | 一种驾驶行为自适应系统及驾驶行为自适应方法 |
| DE102015004550A1 (de) * | 2015-04-08 | 2016-10-13 | Audi Ag | Verfahren zum Betreiben eines Kraftfahrzeugs und Kraftfahrzeug |
| CN107531244B (zh) * | 2015-04-21 | 2020-04-21 | 松下知识产权经营株式会社 | 信息处理系统、信息处理方法、以及记录介质 |
| US10077056B1 (en) * | 2015-04-24 | 2018-09-18 | State Farm Mutual Automobile Insurance Company | Managing self-driving behavior of autonomous or semi-autonomous vehicle based upon actual driving behavior of driver |
| US9914460B2 (en) | 2015-09-25 | 2018-03-13 | Mcafee, Llc | Contextual scoring of automobile drivers |
| US10782687B2 (en) | 2015-09-30 | 2020-09-22 | Sony Corporation | Driving control apparatus, driving control method, and program |
| KR102137213B1 (ko) | 2015-11-16 | 2020-08-13 | 삼성전자 주식회사 | 자율 주행을 위한 모델 학습 장치 및 방법과 자율 주행 장치 |
| DE102015016956A1 (de) * | 2015-12-24 | 2016-09-15 | Daimler Ag | Verfahren zum Lernen eines Fahrbetriebes eines autonom fahrenden Fahrzeuges |
| US9536149B1 (en) | 2016-02-04 | 2017-01-03 | Proxy Technologies, Inc. | Electronic assessments, and methods of use and manufacture thereof |
| US20170297586A1 (en) | 2016-04-13 | 2017-10-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and method for driver preferences for autonomous vehicles |
-
2016
- 2016-09-16 WO PCT/JP2016/077433 patent/WO2017057060A1/ja active Application Filing
- 2016-09-16 JP JP2017543148A patent/JP6773040B2/ja active Active
- 2016-09-16 CN CN201680055610.9A patent/CN108137052B/zh active Active
- 2016-09-16 EP EP16851234.1A patent/EP3357780B1/en active Active
- 2016-09-16 US US15/761,884 patent/US11281211B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20180259956A1 (en) | 2018-09-13 |
| EP3357780A4 (en) | 2019-05-22 |
| JPWO2017057060A1 (ja) | 2018-08-09 |
| EP3357780B1 (en) | 2022-10-26 |
| WO2017057060A1 (ja) | 2017-04-06 |
| CN108137052B (zh) | 2021-09-07 |
| EP3357780A1 (en) | 2018-08-08 |
| CN108137052A (zh) | 2018-06-08 |
| US11281211B2 (en) | 2022-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6773040B2 (ja) | 情報処理システム、および情報処理システムの情報処理方法、情報処理装置、並びにプログラム | |
| JP6922739B2 (ja) | 情報処理装置、および情報処理方法、並びにプログラム | |
| CN108241371B (zh) | 自动驾驶系统 | |
| CN110641472B (zh) | 基于神经网络的用于自主车辆的安全监控系统 | |
| KR102267331B1 (ko) | 자율 주행 차량과 이를 이용한 보행자 안내 시스템 및 방법 | |
| CN108885836B (zh) | 驾驶辅助装置、系统、方法、控制装置、车辆及介质 | |
| KR101730321B1 (ko) | 운전자 보조 장치 및 그 제어방법 | |
| US11685390B2 (en) | Assistance method and assistance system and assistance device using assistance method that execute processing relating to a behavior model | |
| US20210116930A1 (en) | Information processing apparatus, information processing method, program, and mobile object | |
| CN110663073B (zh) | 策略生成装置及车辆 | |
| US20190276044A1 (en) | User interface apparatus for vehicle and vehicle including the same | |
| JP6906175B2 (ja) | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、プログラム、運転支援システム | |
| WO2019131116A1 (ja) | 情報処理装置、移動装置、および方法、並びにプログラム | |
| US20210055116A1 (en) | Get-off point guidance method and vehicular electronic device for the guidance | |
| WO2021090897A1 (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| CN112654547A (zh) | 驾驶提醒的方法、装置及系统 | |
| KR102388625B1 (ko) | 인공지능이 적용된 현장 학습용 자율주행차 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200602 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200901 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200914 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6773040 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |