JP6763321B2 - 自転検出用冶具、基板処理装置及び基板処理装置の運転方法 - Google Patents
自転検出用冶具、基板処理装置及び基板処理装置の運転方法 Download PDFInfo
- Publication number
- JP6763321B2 JP6763321B2 JP2017038740A JP2017038740A JP6763321B2 JP 6763321 B2 JP6763321 B2 JP 6763321B2 JP 2017038740 A JP2017038740 A JP 2017038740A JP 2017038740 A JP2017038740 A JP 2017038740A JP 6763321 B2 JP6763321 B2 JP 6763321B2
- Authority
- JP
- Japan
- Prior art keywords
- rotation
- rotary table
- driven gear
- rotary
- mounting table
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 83
- 238000001514 detection method Methods 0.000 title claims description 48
- 238000000034 method Methods 0.000 title claims description 41
- 239000000758 substrate Substances 0.000 claims description 47
- 230000007246 mechanism Effects 0.000 claims description 34
- 230000008569 process Effects 0.000 claims description 25
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 claims description 11
- 239000007789 gas Substances 0.000 description 54
- 235000012431 wafers Nutrition 0.000 description 40
- 238000004891 communication Methods 0.000 description 11
- 238000011156 evaluation Methods 0.000 description 11
- 238000012360 testing method Methods 0.000 description 11
- 229910004298 SiO 2 Inorganic materials 0.000 description 7
- 230000003647 oxidation Effects 0.000 description 7
- 238000007254 oxidation reaction Methods 0.000 description 7
- 239000002994 raw material Substances 0.000 description 7
- 238000000926 separation method Methods 0.000 description 6
- 238000005192 partition Methods 0.000 description 5
- 238000001179 sorption measurement Methods 0.000 description 5
- 238000000231 atomic layer deposition Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000003111 delayed effect Effects 0.000 description 4
- 238000002407 reforming Methods 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 239000000428 dust Substances 0.000 description 3
- 239000000696 magnetic material Substances 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 238000003860 storage Methods 0.000 description 3
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000002052 molecular layer Substances 0.000 description 2
- 230000001590 oxidative effect Effects 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 0 *C1(CC2C34)[C@@]5C6C(C7)=C7C2C3C5C4C16 Chemical compound *C1(CC2C34)[C@@]5C6C(C7)=C7C2C3C5C4C16 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 229910052786 argon Inorganic materials 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000003989 dielectric material Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000005672 electromagnetic field Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 239000003507 refrigerant Substances 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000007723 transport mechanism Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/30—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring angles or tapers; for testing the alignment of axes
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C16/00—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes
- C23C16/44—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes characterised by the method of coating
- C23C16/458—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes characterised by the method of coating characterised by the method used for supporting substrates in the reaction chamber
- C23C16/4582—Rigid and flat substrates, e.g. plates or discs
- C23C16/4583—Rigid and flat substrates, e.g. plates or discs the substrate being supported substantially horizontally
- C23C16/4584—Rigid and flat substrates, e.g. plates or discs the substrate being supported substantially horizontally the substrate being rotated
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67259—Position monitoring, e.g. misposition detection or presence detection
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C16/00—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes
- C23C16/44—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes characterised by the method of coating
- C23C16/455—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes characterised by the method of coating characterised by the method used for introducing gases into reaction chamber or for modifying gas flows in reaction chamber
- C23C16/45523—Pulsed gas flow or change of composition over time
- C23C16/45525—Atomic layer deposition [ALD]
- C23C16/45544—Atomic layer deposition [ALD] characterized by the apparatus
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C16/00—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes
- C23C16/44—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes characterised by the method of coating
- C23C16/52—Controlling or regulating the coating process
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68764—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by a movable susceptor, stage or support, others than those only rotating on their own vertical axis, e.g. susceptors on a rotating caroussel
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68785—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by the mechanical construction of the susceptor, stage or support
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C16/00—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes
- C23C16/22—Chemical coating by decomposition of gaseous compounds, without leaving reaction products of surface material in the coating, i.e. chemical vapour deposition [CVD] processes characterised by the deposition of inorganic material, other than metallic material
- C23C16/30—Deposition of compounds, mixtures or solid solutions, e.g. borides, carbides, nitrides
- C23C16/40—Oxides
- C23C16/401—Oxides containing silicon
- C23C16/402—Silicon dioxide
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Manufacturing & Machinery (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Metallurgy (AREA)
- Organic Chemistry (AREA)
- Materials Engineering (AREA)
- Chemical Kinetics & Catalysis (AREA)
- General Chemical & Material Sciences (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Chemical Vapour Deposition (AREA)
Description
処理容器内にて、回転テーブルの一面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置に用いられる治具であって、
前記載置台の自転軸を中心として回転するように設けられる回転エレメントと、
前記回転エレメントの回転角を検出し、当該回転エレメントと共にロータリーエンコーダを構成するエンコーダ本体と、
前記エンコーダ本体を回転テーブルを含む回転部位に取り付けるための固定部材と、
前記回転部位に設けられ、前記エンコーダ本体により検出した検出信号を処理する信号処理部と、を備え、
前記エンコーダ本体は、回転エレメントに対して非接触で配置されていることを特徴とする。
他の発明の自転検出用治具は、
処理容器内にて、回転テーブルの上面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置に用いられる治具であって、
前記載置台の自転軸を中心として回転するように前記載置台の上に配置される回転エレメントと、
前記回転エレメントの回転角を検出するために当該回転エレメントの上側に配置され、当該回転エレメントと共にロータリーエンコーダを構成するエンコーダ本体と、
前記エンコーダ本体を回転テーブルを含む回転部位に取り付けるための固定部材と、 前記回転部位に設けられ、前記エンコーダ本体により検出した検出信号を処理する信号処理部と、を備えたことを特徴とする。
処理容器内にて、回転テーブルの一面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置において、
前記回転テーブルと共に回転する部位に自転自在に設けられ、前記載置台を支持する自転軸と、
前記自転軸に設けられた従動ギアと、
前記従動ギアの公転軌道に臨むように設けられ、前記従動ギアと磁気ギア機構を構成する駆動ギアと、
前記載置台の自転軸を中心として回転するように設けられる回転エレメントと、
前記回転エレメントの回転角を検出し、当該回転エレメントと共にロータリーエンコーダを構成するエンコーダ本体と、
前記エンコーダ本体を回転テーブルを含む回転部位に取り付けるための固定部材と、
前記回転部位に設けられ、前記エンコーダ本体により検出した検出信号を処理する信号処理部と、を備え、
前記エンコーダ本体は、回転エレメントに対して非接触で配置されていることを特徴とする。
処理容器内にて、回転テーブルの一面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置を運転する方法において、
前記載置台の自転軸に設けられた従動ギアと、前記従動ギアの公転軌道に臨むように設けられ、前記従動ギアと磁気ギア機構を構成する駆動ギアと、を用い、前記駆動ギアを動作させて前記従動ギアを自転させる工程と、
前記自転軸を中心として回転するように設けられる回転エレメントと共にロータリーエンコーダを構成し、前記回転テーブルを含む回転部位に前記回転エレメントに対して非接触の状態で固定部材を介して取り付けられたエンコーダ本体を用い、前記従動ギアの回転角を検出する工程と、を含むことを特徴とする。
さらにまた、本発明の基板処理装置の運転方法は、
処理容器内にて、回転テーブルの一面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置を運転する方法において、
載置台の上に配置されるべき回転エレメントを備えた本発明の自転検出用治具を、前記基板を処理する装置に取り付ける工程と、
前記載置台の自転軸に設けられた従動ギアと、前記従動ギアの公転軌道に臨むように設けられ、前記従動ギアと磁気ギア機構を構成する駆動ギアと、を用い、前記駆動ギアを動作させて前記従動ギアを自転させる工程と、
前記自転検出用治具を用いて前記従動ギアの回転角を検出する工程と、を含むことを特徴とする。
(評価試験1)
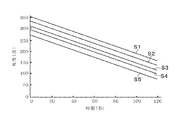
図1に示す回転テーブル2において、駆動ギア5を300極の磁極部(N極部51及びS極部52)、従動ギア4を18極の磁極部(N極部41及びS極部42)により夫々構成し、駆動ギア5と従動ギア4との距離を5mmに設定した構成を用いて評価試験を行った。回転テーブル2に図1に示す自転検出用冶具(ロータリーエンコーダ6及びコントローラユニット77)を取り付け、回転テーブル2を時計回りに30rpmで回転させ、駆動ギア5の回転数を0.1度/秒(6度/分)進めた場合、駆動ギア5の回転数を0.1度/秒(6度/分)遅らせた場合について、夫々の載置台3の回転角を測定した。
評価試験1と同様の回転テーブル2に自転検出用冶具を取り付け、回転テーブル2を時計回りに30rpm、60rpm、120rpmで回転させ、駆動ギア5と回転テーブル2の回転速度差を−0.8度/秒〜0.8度/秒の間で変化させて各載置台3の自転量の評価を行った。回転速度差とは、既述のように、駆動ギア5の角速度と、回転テーブル2の回転による従動ギア4の角速度(公転角速度)との速度差である。
1 成膜装置
11 真空容器
2 回転テーブル
21 回転軸
23、27 公転用回転機構
3 載置台
32 自転軸
34 軸受けユニット
4 従動ギア
5 駆動ギア
41、51 N極部
42、52 S極部
53 自転用回転機構
6 ロータリーエンコーダ
61 回転エレメント
62 エンコーダ本体
7、63 固定部材
75 第1のコントローラ
751 信号処理部
752 通信部
77 コントローラユニット
78 第2のコントローラ
781 通信部
782 表示部
100 制御部
Claims (10)
- 処理容器内にて、回転テーブルの一面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置に用いられる治具であって、
前記載置台の自転軸を中心として回転するように設けられる回転エレメントと、
前記回転エレメントの回転角を検出し、当該回転エレメントと共にロータリーエンコーダを構成するエンコーダ本体と、
前記エンコーダ本体を回転テーブルを含む回転部位に取り付けるための固定部材と、
前記回転部位に設けられ、前記エンコーダ本体により検出した検出信号を処理する信号処理部と、を備え、
前記エンコーダ本体は、回転エレメントに対して非接触で配置されていることを特徴とする自転検出用治具。 - 処理容器内にて、回転テーブルの上面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置に用いられる治具であって、
前記載置台の自転軸を中心として回転するように前記載置台の上に配置される回転エレメントと、
前記回転エレメントの回転角を検出するために当該回転エレメントの上側に配置され、当該回転エレメントと共にロータリーエンコーダを構成するエンコーダ本体と、
前記エンコーダ本体を回転テーブルを含む回転部位に取り付けるための固定部材と、 前記回転部位に設けられ、前記エンコーダ本体により検出した検出信号を処理する信号処理部と、を備えたことを特徴とする自転検出用治具。 - 前記載置台は、回転テーブルの周方向に沿って複数設けられ、
前記ロータリーエンコーダは、前記載置台毎に設けられていることを特徴とする請求項1または2記載の自転検出用治具。 - 処理容器内にて、回転テーブルの一面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置において、
前記回転テーブルと共に回転する部位に自転自在に設けられ、前記載置台を支持する自転軸と、
前記自転軸に設けられた従動ギアと、
前記従動ギアの公転軌道に臨むように設けられ、前記従動ギアと磁気ギア機構を構成する駆動ギアと、
前記載置台の自転軸を中心として回転するように設けられる回転エレメントと、
前記回転エレメントの回転角を検出し、当該回転エレメントと共にロータリーエンコーダを構成するエンコーダ本体と、
前記エンコーダ本体を回転テーブルを含む回転部位に取り付けるための固定部材と、
前記回転部位に設けられ、前記エンコーダ本体により検出した検出信号を処理する信号処理部と、を備え、
前記エンコーダ本体は、回転エレメントに対して非接触で配置されていることを特徴とする基板処理装置。 - 前記従動ギアは、自転方向に沿ってN極部及びS極部が交互に配列され、
前記駆動ギアは、前記公転軌道に沿って全周に亘ってN極部及びS極部が交互に配列され、
前記駆動ギアを回転させるための回転機構を備えたことを特徴とする請求項4記載の基板処理装置。 - 前記載置台は、回転テーブルの周方向に沿って複数設けられ、
前記ロータリーエンコーダは、前記載置台毎に設けられていることを特徴とする請求項4または5記載の基板処理装置。 - 処理容器内にて、回転テーブルの一面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置を運転する方法において、
前記載置台の自転軸に設けられた従動ギアと、前記従動ギアの公転軌道に臨むように設けられ、前記従動ギアと磁気ギア機構を構成する駆動ギアと、を用い、前記駆動ギアを動作させて前記従動ギアを自転させる工程と、
前記自転軸を中心として回転するように設けられる回転エレメントと共にロータリーエンコーダを構成し、前記回転テーブルを含む回転部位に前記回転エレメントに対して非接触の状態で固定部材を介して取り付けられたエンコーダ本体を用い、前記従動ギアの回転角を検出する工程と、を含むことを特徴とする基板処理装置の運転方法。 - 処理容器内にて、回転テーブルの一面側に設けられた基板の載置台を当該回転テーブルの回転により公転させながら自転させると共に、載置台が通過する領域に処理ガスを供給して前記基板を処理する装置を運転する方法において、
請求項2に記載の自転検出用治具を、前記基板を処理する装置に取り付ける工程と、
前記載置台の自転軸に設けられた従動ギアと、前記従動ギアの公転軌道に臨むように設けられ、前記従動ギアと磁気ギア機構を構成する駆動ギアと、を用い、前記駆動ギアを動作させて前記従動ギアを自転させる工程と、
前記自転検出用治具を用いて前記従動ギアの回転角を検出する工程と、を含むことを特徴とする基板処理装置の運転方法。 - 前記駆動ギアは、前記公転軌道の全周に沿って設けられ、
前記従動ギアを自転させる工程は、前記公転軌道上の静止位置から見て、駆動ギアの公転軌道に沿った磁極の配列を変えることにより行われることを特徴とする請求項7または8記載の基板処理装置の運転方法。 - 前記工程で検出された従動ギアの回転角に基づいて、単位時間当たりの載置台の回転角及び回転テーブルの1回転当たりの載置台の回転角のうちの少なくとも一方を表示する工程を含むことを特徴とする請求項7ないし9のいずれか一項に記載の基板処理装置の運転方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017038740A JP6763321B2 (ja) | 2017-03-01 | 2017-03-01 | 自転検出用冶具、基板処理装置及び基板処理装置の運転方法 |
| KR1020180019908A KR102214965B1 (ko) | 2017-03-01 | 2018-02-20 | 자전 검출용 지그, 기판 처리 장치 및 기판 처리 장치의 운전 방법 |
| US15/900,836 US11572625B2 (en) | 2017-03-01 | 2018-02-21 | Rotation detection jig, substrate processing apparatus and method of operating the substrate processing apparatus |
| TW107106295A TWI703661B (zh) | 2017-03-01 | 2018-02-26 | 自轉檢測用治具、基板處理裝置及基板處理裝置之運轉方法 |
| CN201810172436.7A CN108534665B (zh) | 2017-03-01 | 2018-03-01 | 自转检测用治具、基板处理装置及其运转方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017038740A JP6763321B2 (ja) | 2017-03-01 | 2017-03-01 | 自転検出用冶具、基板処理装置及び基板処理装置の運転方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018147939A JP2018147939A (ja) | 2018-09-20 |
| JP6763321B2 true JP6763321B2 (ja) | 2020-09-30 |
Family
ID=63357276
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017038740A Active JP6763321B2 (ja) | 2017-03-01 | 2017-03-01 | 自転検出用冶具、基板処理装置及び基板処理装置の運転方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11572625B2 (ja) |
| JP (1) | JP6763321B2 (ja) |
| KR (1) | KR102214965B1 (ja) |
| CN (1) | CN108534665B (ja) |
| TW (1) | TWI703661B (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6507953B2 (ja) * | 2015-09-08 | 2019-05-08 | 東京エレクトロン株式会社 | 基板処理装置及び基板処理方法 |
| CN107022754B (zh) * | 2016-02-02 | 2020-06-02 | 东京毅力科创株式会社 | 基板处理装置 |
| JP6777055B2 (ja) * | 2017-01-11 | 2020-10-28 | 東京エレクトロン株式会社 | 基板処理装置 |
| TW201946214A (zh) * | 2018-04-28 | 2019-12-01 | 美商應用材料股份有限公司 | 用於旋轉料架處理腔室的原位晶圓旋轉 |
| JP7080152B2 (ja) * | 2018-10-11 | 2022-06-03 | 東京エレクトロン株式会社 | 回転角度検出装置及び回転角度検出方法、並びにこれらを用いた基板処理装置及び基板処理方法 |
| CN109077517A (zh) * | 2018-10-25 | 2018-12-25 | 安徽昊盛木业有限公司 | 一种储物沙发 |
| KR102111095B1 (ko) * | 2018-11-09 | 2020-05-15 | (주)에이앤아이 | 전력전달유닛을 포함하는 무선 로터리 검사장치 |
| JP7296732B2 (ja) * | 2019-01-18 | 2023-06-23 | 東京エレクトロン株式会社 | 基板処理方法 |
| JP7290988B2 (ja) * | 2019-04-26 | 2023-06-14 | キヤノントッキ株式会社 | アライメント装置、成膜装置、アライメント方法、成膜方法および電子デバイスの製造方法 |
| BR112021022306A2 (pt) * | 2019-05-07 | 2021-12-28 | Oerlikon Surface Solutions Ag Pfaeffikon | Dispositivo transportador de peça de trabalho e sistema de tratamento de superfície |
| JP7325313B2 (ja) * | 2019-12-11 | 2023-08-14 | 東京エレクトロン株式会社 | 回転駆動装置、基板処理装置及び回転駆動方法 |
| CN114216660B (zh) * | 2021-09-26 | 2023-09-29 | 安徽聚源昕锐精密机械有限公司 | 一种液压夹具抽检负载检测系统及其使用方法 |
| CN114774876B (zh) * | 2022-05-11 | 2024-08-20 | 纳峰真空镀膜(上海)有限公司 | 一种镀膜转架 |
| CN115555290A (zh) * | 2022-10-20 | 2023-01-03 | 四川大学 | 一种基于深度学习的玻璃盖板细微缺陷检测设备 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002050809A (ja) * | 2000-08-01 | 2002-02-15 | Anelva Corp | 基板処理装置及び方法 |
| JP4537566B2 (ja) * | 2000-12-07 | 2010-09-01 | 大陽日酸株式会社 | 基板回転機構を備えた成膜装置 |
| US7828929B2 (en) * | 2004-12-30 | 2010-11-09 | Research Electro-Optics, Inc. | Methods and devices for monitoring and controlling thin film processing |
| JP5147213B2 (ja) | 2006-10-11 | 2013-02-20 | 日立オートモティブシステムズ株式会社 | インダクタンス式回転角度検出装置及びそれを備えたモータ駆動式の絞り弁制御装置 |
| US7633070B2 (en) * | 2006-12-18 | 2009-12-15 | Kla-Tencor Technologies Corporation | Substrate processing apparatus and method |
| WO2009081953A1 (ja) * | 2007-12-26 | 2009-07-02 | Canon Anelva Corporation | スパッタ装置、スパッタ成膜方法及び分析装置 |
| JP5436043B2 (ja) * | 2009-05-22 | 2014-03-05 | 大陽日酸株式会社 | 気相成長装置 |
| JP5533335B2 (ja) * | 2009-07-22 | 2014-06-25 | 東京エレクトロン株式会社 | 処理装置及びその動作方法 |
| JP5524139B2 (ja) * | 2010-09-28 | 2014-06-18 | 東京エレクトロン株式会社 | 基板位置検出装置、これを備える成膜装置、および基板位置検出方法 |
| KR101380179B1 (ko) * | 2011-09-30 | 2014-03-31 | 가부시키가이샤 뉴플레어 테크놀로지 | 성막 장치 및 성막 방법 |
| WO2015099709A1 (en) * | 2013-12-24 | 2015-07-02 | Halliburton Energy Services, Inc. | Real-time monitoring of fabrication of integrated computational elements |
| JP6330623B2 (ja) * | 2014-10-31 | 2018-05-30 | 東京エレクトロン株式会社 | 成膜装置、成膜方法及び記憶媒体 |
| JP6330630B2 (ja) * | 2014-11-13 | 2018-05-30 | 東京エレクトロン株式会社 | 成膜装置 |
| KR20160148157A (ko) | 2015-06-16 | 2016-12-26 | 주성엔지니어링(주) | 공정챔버 내부에 배치되는 기판 처리장치 및 그 작동방법 |
| JP6507953B2 (ja) * | 2015-09-08 | 2019-05-08 | 東京エレクトロン株式会社 | 基板処理装置及び基板処理方法 |
| CN107022754B (zh) * | 2016-02-02 | 2020-06-02 | 东京毅力科创株式会社 | 基板处理装置 |
-
2017
- 2017-03-01 JP JP2017038740A patent/JP6763321B2/ja active Active
-
2018
- 2018-02-20 KR KR1020180019908A patent/KR102214965B1/ko active IP Right Grant
- 2018-02-21 US US15/900,836 patent/US11572625B2/en active Active
- 2018-02-26 TW TW107106295A patent/TWI703661B/zh active
- 2018-03-01 CN CN201810172436.7A patent/CN108534665B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN108534665B (zh) | 2021-01-15 |
| US11572625B2 (en) | 2023-02-07 |
| KR20180100477A (ko) | 2018-09-11 |
| US20180251892A1 (en) | 2018-09-06 |
| TWI703661B (zh) | 2020-09-01 |
| CN108534665A (zh) | 2018-09-14 |
| JP2018147939A (ja) | 2018-09-20 |
| KR102214965B1 (ko) | 2021-02-09 |
| TW201842612A (zh) | 2018-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6763321B2 (ja) | 自転検出用冶具、基板処理装置及び基板処理装置の運転方法 | |
| JP6777055B2 (ja) | 基板処理装置 | |
| JP6922408B2 (ja) | 基板処理装置 | |
| US10584416B2 (en) | Substrate processing apparatus | |
| US10246775B2 (en) | Film forming apparatus, method of forming film, and storage medium | |
| JP6935741B2 (ja) | 成膜装置 | |
| JP2001524259A (ja) | マイクロエレクトロニクス製造装置用プログラマブル超クリーン電磁サブストレート回転装置及び方法 | |
| TWI695907B (zh) | 基板處理裝置 | |
| TW201816174A (zh) | 成膜裝置、成膜方法及記憶媒體 | |
| JP4847136B2 (ja) | 真空処理装置 | |
| CN115106900B (zh) | 磨削装置 | |
| CN105980594B (zh) | 薄膜涂覆方法及实施该方法的生产线 | |
| CN110177898A (zh) | 溅射装置及成膜方法 | |
| KR102490783B1 (ko) | 회전 각도 검출 장치 및 회전 각도 검출 방법, 그리고 이들을 사용한 기판 처리 장치 및 기판 처리 방법 | |
| KR102594420B1 (ko) | 자기 구동 장치, 착자 방법 및 자기 구동 장치의 제조 방법 | |
| JPS63114210A (ja) | 真空槽内における基板ホルダ−などのクリ−ニング方法及び装置 | |
| JP2003289050A (ja) | 基板処理装置 | |
| KR20040000593A (ko) | 갭가열수단을 구비한 보트회전장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20180508 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190614 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200811 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200824 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6763321 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |