JP6740397B2 - モータ - Google Patents
モータ Download PDFInfo
- Publication number
- JP6740397B2 JP6740397B2 JP2019008262A JP2019008262A JP6740397B2 JP 6740397 B2 JP6740397 B2 JP 6740397B2 JP 2019008262 A JP2019008262 A JP 2019008262A JP 2019008262 A JP2019008262 A JP 2019008262A JP 6740397 B2 JP6740397 B2 JP 6740397B2
- Authority
- JP
- Japan
- Prior art keywords
- bearing portion
- washer
- rotating shaft
- motor
- magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Sliding-Contact Bearings (AREA)
- Support Of The Bearing (AREA)
- Motor Or Generator Frames (AREA)
Description
好ましくは、回転軸には、当該回転軸に設けられたマグネットを支持する支持部材が固定されており、支持部材に、回転軸に設けられたマグネットが固定されている。
好ましくは、支持部材の一部は多角形柱であり、支持部材の一部に回転軸に設けられたマグネットが固定されている。
好ましくは、支持部材の一部は、第2軸受部に向けて突出している突出部である。
好ましくは、支持部材は整流子である。
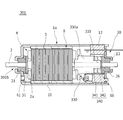
1a,201a フレーム組立体
1b,201b,301b アマチュア組立体
2 回転軸
2a 押し付け部
10 フレーム
21,221 第1軸受部
26,226 第2軸受部
30,330 整流子(支持部材の一例)
40,240,340 付勢構造
41 コイルばね
51 ワッシャ
56 ワッシャ(押し付け部材の一例)
61,66 摺動ワッシャ
230 整流子(押し付け部の一例)
235 支持部材
250 固定部材
341 第1付勢マグネット
342 第2付勢マグネット(押し付け部材の一例)
Claims (5)
- 回転軸と、
前記回転軸に固定されたアマチュア部と、
前記回転軸に取り付けられたロータと、
軸方向の一側方に位置する第1軸受部と、
軸方向の他側方に位置する第2軸受部と、
前記第1軸受部と前記第2軸受部とを保持するフレームと、マグネットと、を有するフレーム組立体と、
前記第2軸受部及び前記第1軸受部の一方から他方に向けて、前記回転軸を磁力により付勢する付勢構造とを備え、
前記第2軸受部はメタル軸受であり、
前記付勢構造は、軸方向において、前記ロータと前記第2軸受部との間には、前記回転軸に設けられたマグネットと、摺動部材と、を備え、
前記摺動部材は、前記回転軸に設けられたマグネットと前記第2軸受部との間にあり、
前記摺動部材は、前記第2軸受部及び前記回転軸に設けられたマグネットに対して摺動可能であり、
前記ロータの回転について、前記摺動部材と前記第2軸受部との間で保持トルクが発生する、モータ。 - 前記回転軸には、当該回転軸に設けられたマグネットを支持する支持部材が固定されており、
前記支持部材に、前記回転軸に設けられたマグネットが固定されている、請求項1に記載のモータ。 - 前記支持部材の一部は多角形柱であり、
前記支持部材の一部に前記回転軸に設けられたマグネットが固定されている、請求項2に記載のモータ。 - 前記支持部材の一部は、前記第2軸受部に向けて突出している突出部である、請求項3に記載のモータ。
- 前記支持部材は整流子である、請求項2から4のいずれかに記載のモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019008262A JP6740397B2 (ja) | 2019-01-22 | 2019-01-22 | モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019008262A JP6740397B2 (ja) | 2019-01-22 | 2019-01-22 | モータ |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015254464A Division JP6472375B2 (ja) | 2015-12-25 | 2015-12-25 | モータ |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020124400A Division JP2020171195A (ja) | 2020-07-21 | 2020-07-21 | モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019088187A JP2019088187A (ja) | 2019-06-06 |
| JP6740397B2 true JP6740397B2 (ja) | 2020-08-12 |
Family
ID=66763585
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019008262A Active JP6740397B2 (ja) | 2019-01-22 | 2019-01-22 | モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6740397B2 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5226102U (ja) * | 1975-07-30 | 1977-02-23 | ||
| JPH11113209A (ja) * | 1997-10-06 | 1999-04-23 | Tokyo Parts Ind Co Ltd | 小型モータの軸受構造 |
| US6356004B1 (en) * | 2000-07-31 | 2002-03-12 | Valeo Electrical Systems, Inc. | Combination brush retainer/spring assembly |
| JP2007252130A (ja) * | 2006-03-17 | 2007-09-27 | Oki Micro Giken Kk | 直流モータ |
| JP6021459B2 (ja) * | 2012-06-19 | 2016-11-09 | キヤノン株式会社 | ステッピングモータ、レンズ装置、および、撮像装置 |
-
2019
- 2019-01-22 JP JP2019008262A patent/JP6740397B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019088187A (ja) | 2019-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11764637B2 (en) | Inner-rotor motor | |
| CN101034843B (zh) | 电动机 | |
| JP4250823B2 (ja) | 直流ブラシモータ | |
| JP5809551B2 (ja) | モータの軸受構造及びこれを備えたモータ | |
| US6570275B2 (en) | Motor having two degrees of free motion with a core having inner and outer winding portions | |
| CN103545973B (zh) | 旋转电机 | |
| JP2014212686A (ja) | ステッピングモータ | |
| JP4916500B2 (ja) | ロータに直接磁気ブレーキを設けた電気機械 | |
| JPH01311844A (ja) | リニアアクチュエータ | |
| JP2020171195A (ja) | モータ | |
| CN109565219B (zh) | 电动机装置 | |
| JP6740397B2 (ja) | モータ | |
| JP7291260B2 (ja) | モータ | |
| JP2020048298A (ja) | ファンモータ | |
| US6823971B2 (en) | Simplified loading device | |
| JP2005168211A (ja) | ステッピングモータ | |
| CN114393223A (zh) | 电主轴的转轴无接触的轴向浮动消除结构及电主轴 | |
| JPWO2022215369A5 (ja) | ||
| JP2004120850A (ja) | 減速機構付モータ | |
| RU2249293C1 (ru) | Торцовая электрическая асинхронная машина | |
| JP2015080306A (ja) | インナーロータ型モータ | |
| JP3218795B2 (ja) | モータの軸受装置 | |
| WO2025173389A1 (ja) | 電動機 | |
| JPH0822139B2 (ja) | 電動機 | |
| JPH06303757A (ja) | Pm型ステッピングモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200515 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200623 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200722 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6740397 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |