JP6728107B2 - 牧草管理システム - Google Patents
牧草管理システム Download PDFInfo
- Publication number
- JP6728107B2 JP6728107B2 JP2017121879A JP2017121879A JP6728107B2 JP 6728107 B2 JP6728107 B2 JP 6728107B2 JP 2017121879 A JP2017121879 A JP 2017121879A JP 2017121879 A JP2017121879 A JP 2017121879A JP 6728107 B2 JP6728107 B2 JP 6728107B2
- Authority
- JP
- Japan
- Prior art keywords
- grass
- machine
- unit
- molding
- prohibition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images























Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01F—PROCESSING OF HARVESTED PRODUCE; HAY OR STRAW PRESSES; DEVICES FOR STORING AGRICULTURAL OR HORTICULTURAL PRODUCE
- A01F15/00—Baling presses for straw, hay or the like
- A01F15/08—Details
- A01F15/0875—Discharge devices
- A01F15/0883—Discharge devices for round balers
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B79/00—Methods for working soil
- A01B79/005—Precision agriculture
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/006—Control or measuring arrangements
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/64—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis mounted on a vehicle, e.g. a tractor, or drawn by an animal or a vehicle
- A01D34/66—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis mounted on a vehicle, e.g. a tractor, or drawn by an animal or a vehicle with two or more cutters
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D75/00—Accessories for harvesters or mowers
- A01D75/28—Control mechanisms for harvesters or mowers when moving on slopes; Devices preventing lateral pull
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D78/00—Haymakers with tines moving with respect to the machine
- A01D78/005—Turners; Tedders
- A01D78/006—Rotating turners
- A01D78/007—Control mechanisms therefor
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D78/00—Haymakers with tines moving with respect to the machine
- A01D78/005—Turners; Tedders
- A01D78/008—Turners; Tedders with forks
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01F—PROCESSING OF HARVESTED PRODUCE; HAY OR STRAW PRESSES; DEVICES FOR STORING AGRICULTURAL OR HORTICULTURAL PRODUCE
- A01F15/00—Baling presses for straw, hay or the like
- A01F15/07—Rotobalers, i.e. machines for forming cylindrical bales by winding and pressing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/22—Display screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/50—Instruments characterised by their means of attachment to or integration in the vehicle
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01F—PROCESSING OF HARVESTED PRODUCE; HAY OR STRAW PRESSES; DEVICES FOR STORING AGRICULTURAL OR HORTICULTURAL PRODUCE
- A01F15/00—Baling presses for straw, hay or the like
- A01F15/08—Details
- A01F2015/0808—Balers incorporate an inclinometer
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Environmental Sciences (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Soil Sciences (AREA)
- Harvester Elements (AREA)
- Fertilizing (AREA)
Description
そこで、本発明は上記問題点に鑑み、成形機によって成形した成形材の排出を禁止する禁止位置を簡単に設定することができる牧草管理システムを提供することを目的とする。
牧草管理システムは、圃場の牧草を成形して排出可能な成形機における成形材の排出に関する設定を可能な牧草管理システムであって、前記成形材の排出を禁止する禁止位置を設定する禁止設定部を備えている。
牧草管理システムは、前記圃場のフィールドを表示する圃場表示部を備え、前記禁止設定部は、前記フィールドで選択された所定範囲を前記禁止位置に設定する。
牧草管理システムは、前記牧草の作業を行う作業機の走行時の機械位置を検出する位置検出部と、前記作業機に設けられた操作部と、を備え、前記禁止設定部は、前記操作部を操作した際の前記機械位置を前記禁止位置に設定する。
牧草管理システムは、前記圃場の地形に関する地形情報を検出する地形情報検出部と、前記地形情報に基づいて圃場の傾斜マップを作成するマップ作成部と、を備え、前記禁止設定部は、前記傾斜マップにて示された傾斜角度が閾値以上である圃場の位置を前記禁止位置に設定する。
牧草管理システムは、前記圃場の地形に関する地形情報を取得する地形情報検出部を備え、前記禁止設定部は、前記地形情報から得られた圃場の境界からの距離に基づいて前記禁止位置を設定する。
牧草管理システムは、前記成形機に設けられ、且つ前記成形機が禁止位置にある場合に当該成形機からの排出を許可しない制御部を備えている。
前記作業機は、前記牧草を成形して排出可能な成形機である。
前記作業機は、前記牧草の刈取を行う刈取機、前記牧草の拡散を行う拡散機、前記牧草の集草を行う集草機、施肥を行う施肥機のいずれかである。
[第1実施形態]
図1は、牧草管理システムの全体図を示している。牧草管理システムは、圃場の牧草を成形して排出可能な成形機10Aに関し、当該成形機10Aによって成形した成形材の排出に関する設定をすることが可能なシステムである。
成形機10Aは、圃場の牧草を収集して、収集した作物をロール状や矩形状(キューブ状)の所定形状に成形する機械である。成形機10Aは、例えば、牧草をロール状に成形するロールベーラ、ホールクロップ、矩形状に成形するヘイベーラ等である。
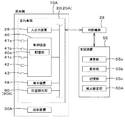
図2に示すように、成形機10Aは、走行車両20と、成形装置30Aとを備えている。走行車両20は、トラクタである。走行車両20は、車体21と、原動機22と、変速装置23とを備えている。車体21には、走行装置24が設けられている。走行装置24は、前輪及び後輪を有する装置である。走行装置24は、クローラ型の装置であってもよい。原動機22は、ディーゼルエンジン、電動モータ等であって、この実施形態ではディーゼルエンジンで構成されている。変速装置23は、走行装置24の推進力を切換可能で
あると共に、走行装置24の前進、後進の切換が可能である。また、車体21の後部には、3点リンク機構等で構成された連結部25が設けられている。連結部25には、成形装置30Aが着脱可能である。成形装置30Aを連結部25に連結することによって、車体21によって成形装置30Aを牽引することができる。また、走行車両20は、原動機22等の動力によって駆動するPTO軸を有し、PTO軸の動力を作業装置に伝達可能である。また、走行車両20は、運転席を内部に備えたキャビン26を備えている。
図2に示すように、成形装置30Aは、移動(走行)可能な車体27と、車体27に支持され且つ牧草を取り入れる取入部35を備えている。取入部35は、刈り取られた圃場上の牧草を前方(走行車両20側)から取り入れる装置であって、例えば、前方が開放状であるケーシング35aを有している。また、取入部35は、ケーシング35a等に支持された回転軸35bと、回転軸35bに固定された案内具35cを有している。したがって、回転軸35bを回転することによって、圃場上の牧草を案内具35cによりケーシング35a内へ取り入れることができる。なお、図2の取入部35は一例であり、上述した取入部35に限定されない。
けているため、牧草に関する作業時(走行時)の位置(成形作業時の機械位置)を検出することができる。
具体的には、制御装置40には、クランク位置を検出するセンサ41a、カム位置を検出するセンサ41b、原動機22の回転数(エンジン回転数)を検出するセンサ41cが接続されている。制御装置41は、センサ41a〜41c等で検出されたクランク位置、カム位置、エンジン回転数等の信号に基づいて求めた制御信号を、インジェクタ、コモンレール、サプライポンプ等に出力することで、原動機(エンジン)22を制御する。なお、インジェクタの制御では燃料噴射量、噴射時期、燃料噴射率が示された制御信号を当該インジェクタに出力する。また、サプライポンプやコモンレールの制御では燃料噴射圧等が示された信号を、当該サプライポンプやコモンレールに出力する。なお、制御装置40による原動(エンジン)22の制御は一例であり、限定されない。
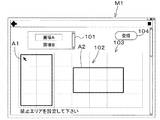
させる。或いは、禁止設定部50Aは、圃場表示部103にフィールド102を表示後、フィールド102の任意の点(基準位置)に対する緯度、経度の情報を入力するように管理者等に要求し、管理者が入力インタフェース(マウス、キーボード等)を用いて入力した基準位置に対する位置(緯度、経度)に基づき、フィールド102上の全ての点に緯度、経度を割り当てる。
図5は、禁止設定部50Aによって設定した禁止位置と、圃場の位置(フィールド102の位置)と、禁止エリアA1との一例を示している。設定画面M1(禁止設定部50A)によって設定した禁止位置(図5に示した禁止位置)は、禁止情報として記憶部55cに記憶される。なお、禁止位置と、圃場を識別する識別情報(圃場名、圃場コード等)とを禁止情報として記憶部55cに記憶してもよい。禁止位置の設定後、USB等の外部機器28を支援装置55に接続することにより、記憶部55cに記憶した禁止位置情報は、外部機器28に転送することができる。
さて、成形機10Aは、禁止位置取得部を備えている。禁止位置取得部は、成形材K1の排出を禁止する禁止位置を取得する装置である。この実施形態では、禁止位置取得部は、外部機器28が接続可能な入出力装置29である。禁止情報を記憶した外部機器28を、入出力装置29に接続すると、当該入出力装置29は、外部機器28に記憶された禁止位置を含む禁止情報を取得する。取得した禁止情報は、制御装置40に設けられた記憶部40aに記憶される。
図1に示すように、成形機10Aは、排出操作部43を備えている。排出操作部43は、排出部37による成形材K1の排出を操作する操作具であって、例えば、ON/OFFに切換可能なスイッチである。排出操作部43は、運転席の近傍に設けられていて、オペレータが操作可能である。排出操作部43をONにすると、排出指令信号が制御装置40に入力され、排出操作部43をOFFにすると、排出停止信号が制御装置40に入力される。なお、排出操作部43は、表示装置48に表示したON/OFFに切り換え可能なスイッチであってもよい。入出力装置29を、表示装置48に設けてもよい。
としてもよい。つまり、排出操作部43をOFFからONに切り換えてから成形材K1が圃場に排出されるまでの成形機10Aの走行距離を予め設定しておき、切換時の機械位置に予め設定された走行距離を加算した位置を、排出位置DW1としてもよい。なお、上述した排出位置DW1の設定は一例であり、限定されない。
制御装置40は、排出位置DW1と禁止位置とが一致していない場合、成形材K1の排出を許可し、例えば、第2ケース体36bに接続された油圧シリンダを伸縮させる切換弁等に対して、制御信号を出力することで、油圧シリンダを伸長させ、成形装置30Aをゲート開放状態にする。
したがって、成形機10Aによる成形作業時に、禁止位置に設定された場所に成形材K1を排出することを防止することができる。
[第2実施形態]
図7は、第2実施形態における牧草管理システムの全体図を示している。第2実施形態では、上述した実施形態と異なる構成について説明する。図7に示すように、牧草管理システムは、禁止位置を設定する禁止設定部50Bを備えている。禁止設定部50Bは、作業機の走行時における情報に基づいて禁止位置を設定する。
まず、草刈機10B、拡散機10C、集草機10Dの概略について説明する。
って、隣接して並ぶカッター68が回転軸67の回転に伴って回転することで牧草を刈り取る。即ち、回転軸67によって、カッター68は回転し、カッター68によって牧草は刈り取られ、牧草は刈取後、外部に排出される。なお、刈取装置30Bは、上述した構成に限定されず、牧草を刈り取る装置であればよい。例えば、刈取装置30Bは、ナイフ状のカッター68によって牧草を刈り取るハンマーナイフ式であっても、その他の方式であってもよい。
さて、図8〜図10に示すように、作業機(草刈機10B、拡散機10C、集草機10D)は、位置検出部90(位置検出部90B、位置検出部90C、位置検出部90D)を有している。
ず、別の場所であってもよい。
位置検出部90B、90C、90Dは、衛星測位システムによって自己の位置(緯度、経度を含む測位情報)を検出する位置検出装置である。即ち、位置検出部90B、90C、90Dは、測位衛星から送信された信号(測位衛星の位置、送信時刻、補正情報等)を受信し、受信した信号に基づいて位置(例えば、緯度、経度)を検出する。
図11に示すように、草刈機10Bにおける刈取作業時は、位置検出部90Bは刈取作業時の機械位置PBn(n=1,2,3・・・n)を検出する。例えば、草刈機10Bにおける刈取作業時において、機械位置PB3の時点で操作部91BがONになり、制御装置40が禁止信号を取得すると、禁止設定部50Bは、操作部91BのON時における機械位置PB3を保持する。また、刈取作業時において、機械位置PB7で操作部91BがONからOFFに変化すると、禁止設定部50Bは、操作部91BがONからOFFに変化した機械位置PB7を保持する。そして、禁止設定部50Bは、刈取作業時に操作部91BがONされた際の機械位置、即ち、図11では、機械位置PB3〜機械位置PB7までの範囲を禁止エリアに設定する。一方、操作部91BがOFFに維持された状態(制御装置40が許可信号を取得している状態)では、禁止設定部50Bは、刈取作業時の機械位置PBnを禁止位置として設定しない。
また、集草機10Dおける集草作業時は、位置検出部90Dは集草作業時の機械位置PDn(n=1,2,3・・・n)を検出する。禁止設定部50Bは、集草作業時において操作部91DのON時における機械位置PDnを禁止位置に設定し、操作部91DのOFF時における機械位置PDnは禁止位置に設定しない。
この実施形態では、刈取作業、拡散作業、集草作業における全ての作業において、禁止位置の設定が行えるとしているが、当然にこれに限定されず、刈取作業、拡散作業、集草作業のいずれかで行えればよい。牧草に関する作業として、刈取作業、拡散作業、集草作業を例示したが、これに限定されず、施肥作業時に行ってもよいし、その他の作業時に行ってもよい。施肥作業にて行う際は、施肥機に、位置検出部90、操作部91、禁止設定部50Bを設けることにより、禁止位置の設定を行うことができる。
この場合、成形機10A、草刈機10B、拡散機10C、集草機10D、施肥機のいずれにおいても、作業時(走行時)において、制御装置40は、操作部91のON/OFFを示す排出設定情報(禁止信号、許可信号)と位置検出部90で検出した機械位置とを対応付けて禁止情報として記憶部40aに記憶する。また、外部機器28を走行車両20の入出力装置29に接続した場合、記憶部40aに記憶されている禁止情報(排出設定情報及び機械位置)は、外部機器28に転送される。外部機器28を支援装置55に接続すると、禁止情報(排出設定情報及び機械位置)が支援装置55に転送される。
[第3実施形態]
図12は、第3実施形態における牧草管理システムの全体図を示している。第3実施形態では、上述した実施形態と異なる構成について説明する。図12に示すように、牧草管理システムは、禁止位置を設定する禁止設定部50Cを備えている。禁止設定部50Cは、作業機の走行時における情報に基づいて禁止位置を設定する。
傾き検出部92は、加速度、角速度等を検出することが可能なセンサであって、加速度センサ、ジャイロセンサ等である。傾き検出部92A、92B、92C、92Dは、走行車両20A、20B、20C、20Dに設けられ、制御装置40に接続されている。制御装置40は、傾き検出部92A、92B、92C、92Dで検出された加速度、角速度等を取得し、取得した加速度、角速度から走行車両20A、20B、20C、20Dのそれぞれの傾きを検出することができる。なお、傾き検出部92A、92B、92C、92Dは、成形装置30A、刈取装置30B、拡散装置30C、集草装置30Dに設け、制御装置40は、成形装置30A、刈取装置30B、拡散装置30C、集草装置30Dのそれぞ
れの傾きを求めてもよい。
草刈機10Bおける刈取作業時は、位置検出部90Bは刈取作業時の機械位置PBnを検出する。図13に示すように、走行車両20Bの禁止設定部50Cは、傾き検出部92Bで検出された加速度、角速度等を用いて当該走行車両20Bの進行方向(走行方向)の傾きθ(水平方向に対する走行車両の傾きθ)を逐次求める。例えば、草刈機10Bにおける刈取作業時において、機械位置PBnの時点での傾きθが予め定められた閾値(傾き判定値)以上である場合、禁止設定部50Cは、走行車両20Bの傾きθが閾値以上になった時点の機械位置PBnを保持する。また、刈取作業時において、機械位置PBnの時点での傾きθが閾値以上から閾値未満である場合に変化すると、禁止設定部50Cは、走行車両20Bの傾きθが閾値未満に変化した時点の機械位置PBnを保持する。例えば、図13に示すように、機械位置PB3で傾きθが閾値以上となり、機械位置PB13で傾きθが閾値未満になった場合に、禁止設定部50Cは、機械位置PB3から機械位置PB12までの機械位置を禁止位置に設定する。一方、走行車両20Bの傾きθが閾値未満である場合には、禁止位置として設定しない。
以上のように、成形機10Aによる成形作業前の作業(刈取作業、拡散作業、集草作業等)において、走行車両20B、20C、20Dの傾きに応じて、禁止位置を設定することができる。この実施形態では、刈取作業、拡散作業、集草作業における全ての作業において、禁止位置の設定が行えるとしているが、当然にこれに限定されず、刈取作業、拡散作業、集草作業のいずれかで行えればよい。牧草に関する作業として、刈取作業、拡散作業、集草作業を例示したが、これに限定されず、施肥作業時に行ってもよいし、その他の作業時に行ってもよい。施肥作業にて行う際は、施肥機に、位置検出部90、傾き検出部92、禁止設定部50Cを設けることにより、禁止位置の設定を行うことができる。
8を介して支援装置55に転送することができる。
上述した実施形態では、禁止設定部50Cを制御装置40に設けた例を説明したが、当該禁止設定部50Cを支援装置55に設けてもよい。この場合、禁止設定部50Cは、演算部55a(支援装置55)等に組み込まれたプログラム等から構成される。
[第4実施形態]
図14は、第4実施形態における牧草管理システムの全体図を示している。第4実施形態では、上述した実施形態と異なる構成について説明する。図14に示すように、牧草管理システムは、禁止位置を設定する禁止設定部50Dを備えている。
また、地形情報検出部は、拡散機10Cによる拡散作業時に検出された圃場の高さ情報を地形情報として取得する装置であってもよい。例えば、地形情報検出部は、拡散機10Cに設けられた位置検出部90Cである。
なお、地形情報検出部は、圃場の地形情報を取得する装置であればよく、位置検出部90A、位置検出部90B、位置検出部90C、位置検出部90Dに限定されない。例えば、マルチコプターにカメラ等の撮像装置(地形情報検出部)を設け、撮像装置で得られた画像を地形情報としてもよい。また、圃場に施肥を行う施肥機、薬剤の散布を行う散布機等に高さが検出可能な位置検出部90で構成した地形情報検出部を設けてもよい。成形機10A、草刈機10B、拡散機10C、集草機10D、施肥機、マルチコプターのいずれにおいても、地形情報は、外部機器28を介して支援装置55に転送することが可能である。
定部55D及びマップ作成部93は、演算部55a(支援装置55)等に組み込まれたプログラム等から構成されている。マップ作成部93は、地形情報(経度、緯度、高さ)が支援装置55に入力されると、図15に示すように、地形情報に基づいて圃場の起伏を示す3次元の傾斜マップ(圃場マップ)110を作成する。マップ作成部93は、複数のメッシュ部(ポリゴン)Qn[n=1,2,3・・・]を構成することにより、傾斜マップ110を作成する。複数のメッシュ部Qnは、位置(経度、緯度)とメッシュ部110aの角度(傾斜角度)とが対応付けられている。
[第5実施形態]
図16は、第5実施形態における牧草管理システムの全体図を示している。第5実施形態では、上述した実施形態と異なる構成について説明する。第5実施形態における牧草管理システムは、圃場の傾斜マップを、禁止位置を設定する設定画面M1に表示するシステムである。
図17は、マップ作成部93で作成した傾斜マップ110を、設定画面M1に表示した一例を示している。図17に示すように、支援装置55を管理者等が操作すると、禁止設定部50Aは、当該支援装置55の表示部55bに、設定部101及び圃場表示部103を有する設定画面M1を表示させる。
[第6実施形態]
図18は、第6実施形態における牧草管理システムの全体図を示している。第6実施形態では、上述した実施形態と異なる構成について説明する。第6実施形態における牧草管理システムは、地形情報から得られた圃場の境界に基づいて禁止位置を設定するシステムである。
禁止設定部50Eは、地形情報(経度、緯度、高さ)が支援装置55に入力されると、図19に示すように、圃場の境界線(輪郭線)E1を含む圃場マップ111を作成する。
禁止設定部50Eは、支援装置55の表示部55bに圃場マップ111を表示する。ここで、圃場が多角形であって、圃場マップ111で示される境界線の数を[E1n(n=1,2,3・・・)]とした場合、禁止設定部50Eは、圃場の境界線E1nと、当該境界線Enを圃場の内側へ所定距離D1シフトした仮想線E2nとの間で形成される禁止エリアA1nの少なくとも1つを、禁止位置に設定する。
例えば、圃場が道路に隣接していたり、住宅に隣接している場合、禁止設定部50Eは、道路に隣接する境界線E1n又は住宅に隣接する境界線E1nを、禁止位置を設定するための境界線E1nとして適用する。例えば、複数の境界線E1nを有する圃場マップ111を支援装置55の表示部55bに表示した後に、入力インターフェースを用いて、禁止位置を設定するための境界線E1nを選択してもよいし、圃場の地形情報から道路又は住宅に隣接する境界線E1nを抽出してもよい。このように、圃場が道路又は住宅に隣接している場合等、圃場の地形情報から簡単に禁止位置を設定することができる。
[第7実施形態]
図20は、第7実施形態における成形機のブロック図を示している。第7実施形態では、上述した実施形態と異なる構成について説明する。第7実施形態に示す成形機は、禁止位置を取得する成形機であればよく、禁止位置の設定方法は上述した方法に限定されず、何でもよい。なお、第7実施形態における成形機に関して、上述した第1実施形態〜第6実施形態に示した禁止位置の設定方法を適用してもよく、また、上述した第1実施形態〜第6実施形態の一部の構成を適用してもよい。
したがって、オペレータが排出操作部43をOFFからONに切り換えて成形材K1を排出する手動式において、排出位置DW1が禁止位置に一致した場合には、排出操作部43をONしたとしても成形材K1の排出を防止することができる。
成形機10Aの成形作業時において、成形状態検出部45で検出された成形材K1のロール径が閾値(排出推奨径)以上になった場合、制御装置40は、ロール径が閾値以上に
なったこと、即ち、収容部36内の成形材K1が満杯に近いこと(成形材K1を排出する時期が近いこと)を示す案内を、表示装置48に表示させる。オペレータは、表示装置48に表示された案内に応じて、成形機10Aを減速して停止させた後に、排出操作部43をOFFからONに切り換える。制御装置40は、成形機10Aが停止すると、排出位置(機械位置)DW1が禁止位置に設定されているか否かを判断後、排出位置DW1が禁止位置に一致しなければ成形材K1の排出を実行し、排出位置DW1が禁止位置に一致すれば成形材K1の排出を実行しない。
また、成形機10Aは、解除操作部46を備えていてもよい。解除操作部46は、禁止位置の解除を指令する操作具である。解除操作部46は、例えば、ON/OFFに切換可能なスイッチである。解除操作部46は、運転席の近傍に設けられていて、オペレータが操作可能である。解除操作部46をONにすると、解除指令信号が制御装置40に入力され、解除操作部46をOFFにすると、解除指令信号は制御装置40に入力されない。なお、解除操作部46は、表示装置48に表示したON/OFFに切り換え可能なスイッチであってもよい。
[第8実施形態]
図21は、第8実施形態における成形機の制御ブロック図である。第8実施形態では、上述した実施形態と異なる構成について説明する。第8実施形態に示す成形機は、禁止位置を取得する成形機であればよく、禁止位置の設定方法は上述した方法に限定されず、何でもよい。なお、第8実施形態における成形機に関して、上述した第1実施形態〜第6実施形態に示した禁止位置の設定方法を適用してもよく、また、上述した第1実施形態〜第7実施形態の一部の構成を適用してもよい。
成形機10Aの成形作業時において、成形状態検出部45で検出された成形材K1のロール径が閾値(排出推奨径)以上になった場合、制御装置40は、成形機10Aを自動的に減速させる。また、制御装置40は、成形機10Aの減速後、収容部36(排出部37)による排出動作の準備段階に移行し、準備段階に入った時点での機械位置を排出位置D
W1として、排出位置DW1と、禁止位置とが一致するか否かの判断を行う。制御装置40は、排出位置DW1と禁止位置とが一致すれば、排出動作を実行しない。一方、制御装置40は、排出位置DW1と禁止位置とが一致しなければ、排出動作を実行する。なお、上述した実施形態では、成形機10Aの減速後、収容部36(排出部37)による排出動作の準備段階に移行した時点での機械位置を排出位置DW1としていたが、これに代え、準備段階の時点の機械位置から数m〜数十m先の位置を、排出位置DW1に設定してもよい。つまり、準備段階の時点から成形材K1が圃場に排出されるまでの成形機10Aの走行距離を予め設定しておき、準備段階の機械位置に予め設定した走行距離を加算した位置を、排出位置DW1としてもよい。なお、上述した排出位置DW1の設定は一例であり、限定されない。
[第9実施形態]
図22は、第9実施形態における成形機の制御ブロック図である。第9実施形態では、上述した実施形態と異なる構成について説明する。第9実施形態に示す成形機は、禁止位置を取得する成形機であればよく、禁止位置の設定方法は上述した方法に限定されず、何でもよい。なお、第9実施形態における成形機に関して、上述した第1実施形態〜第6実施形態に示した禁止位置の設定方法を適用してもよく、また、上述した第1実施形態〜第8実施形態の一部の構成を適用してもよい。
排出予測部47は、位置検出部90Aにより検出された位置(機械位置)と、成形状態検出部45で検出された成形状態とに基づいて成形材K1の排出前に、排出位置DW1を予測する。牧草の収集(回収)を開始後、排出予測部47は、成形状態検出部45によって検出されたロール径を監視し、ロール径の増加傾向から当該ロール径が閾値(排出推奨径)に達する位置を推定する。
10Aが、禁止エリアA5の先の位置、例えば、位置P6を排出位置として設定し、排出位置P6に成形材K1を排出するように、成形機10A(排出部37)を制御する。
なお、上述した成形機10Aは、収容部36をゲート開放状態にした場合に当該収容室36内の成形材K1が直接圃場に排出される構造であったが、収容室36から外部に排出した成形材K1を一時的に保持し且つ保持した成形材K1を圃場下で排出する保持機構(排出部)を有する成形機であってもよい。
40 制御装置(制御部)
50A 禁止設定部
50B 禁止設定部
50C 禁止設定部
50D 禁止設定部
50E 禁止設定部
90 位置検出部
90A 位置検出部
90B 位置検出部
90C 位置検出部
90D 位置検出部
91 操作部
91A 操作部
91B 操作部
91C 操作部
91D 操作部
92 傾き検出部
92A 傾き検出部
92B 傾き検出部
92C 傾き検出部
92D 傾き検出部
93 マップ作成部
102 フィールド
103 圃場表示部
111 圃場マップ
A1 禁止エリア
A2 禁止エリア
A3 禁止エリア
A4 禁止エリア
A5 禁止エリア
K1 成形材
PAn 成形作業時の機械位置
PBn 刈取作業時の機械位置
PCn 拡散作業時の機械位置
PDn 集草作業時の機械位置
Claims (12)
- 圃場の牧草を成形して排出可能な成形機における成形材の排出に関する設定を可能な牧草管理システムであって、
前記成形材の排出を禁止する禁止位置を設定する禁止設定部を備えている牧草管理システム。 - 前記圃場のフィールドを表示する圃場表示部を備え、
前記禁止設定部は、前記フィールドで選択された所定範囲を前記禁止位置に設定する請求項1に記載の牧草管理システム。 - 前記禁止設定部は、前記牧草の作業を行う作業機の走行時における情報に基づいて前記禁止位置を設定する請求項1又は2に記載の牧草管理システム。
- 前記牧草の作業を行う作業機の走行時の機械位置を検出する位置検出部と、
前記作業機に設けられた操作部と、
を備え、
前記禁止設定部は、前記操作部を操作した際の前記機械位置を前記禁止位置に設定する請求項3に記載の牧草管理システム。 - 前記牧草の作業を行う作業機の走行時の機械位置を検出する位置検出部と、
前記作業機に設けられ且つ前記作業機の走行時における傾きを検出する傾き検出部と、
を備え、
前記禁止設定部は、前記傾き検出部で検出された傾きが閾値以上である前記機械位置を前記禁止位置に設定する請求項3に記載の牧草管理システム。 - 前記圃場の地形に関する地形情報を検出する地形情報検出部と、
前記地形情報に基づいて、圃場の傾斜マップを作成するマップ作成部と、
を備え、
前記禁止設定部は、前記傾斜マップにて示された傾斜角度が閾値以上である圃場の位置を前記禁止位置に設定する請求項1〜5のいずれかに記載の牧草管理システム。 - 前記圃場表示部は、前記傾斜マップを表示する請求項6に記載の牧草管理システム。
- 前記圃場の地形に関する地形情報を取得する地形情報検出部を備え、
前記禁止設定部は、前記地形情報から得られた圃場の境界からの距離に基づいて前記禁止位置を設定する請求項1〜7のいずれかに記載の牧草管理システム。 - 前記成形機に設けられ、且つ前記成形機が禁止位置にある場合に当該成形機からの排出を許可しない制御部を備えている請求項1〜8のいずれかに記載の牧草管理システム。
- 前記成形機に設けられ、且つ前記成形機が禁止位置にある場合に当該成形機が禁止位置にあることを報知する報知部を備えている請求項1〜9のいずれかに記載の牧草管理システム。
- 前記作業機は、前記牧草を成形して排出可能な成形機である請求項3〜5のいずれかに記載の牧草管理システム。
- 前記作業機は、前記牧草の刈取を行う刈取機、前記牧草の拡散を行う拡散機、前記牧草の集草を行う集草機、施肥を行う施肥機のいずれかである請求項3〜5のいずれかに記載
の牧草管理システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017121879A JP6728107B2 (ja) | 2017-06-22 | 2017-06-22 | 牧草管理システム |
| US15/989,178 US10687473B2 (en) | 2017-06-22 | 2018-05-25 | Grass management system and grass management method |
| EP18178907.4A EP3417698B1 (en) | 2017-06-22 | 2018-06-20 | Grass management system and a method for operating a forming machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017121879A JP6728107B2 (ja) | 2017-06-22 | 2017-06-22 | 牧草管理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019004729A JP2019004729A (ja) | 2019-01-17 |
| JP6728107B2 true JP6728107B2 (ja) | 2020-07-22 |
Family
ID=62715975
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017121879A Active JP6728107B2 (ja) | 2017-06-22 | 2017-06-22 | 牧草管理システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10687473B2 (ja) |
| EP (1) | EP3417698B1 (ja) |
| JP (1) | JP6728107B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10952369B2 (en) | 2017-04-24 | 2021-03-23 | Kubota Corporation | Grass management system |
| JP6968587B2 (ja) * | 2017-06-22 | 2021-11-17 | 株式会社クボタ | 成形機及び牧草管理システム |
| JP6716763B1 (ja) * | 2019-09-06 | 2020-07-01 | 株式会社クボタ | 作業車両 |
| JP7170615B2 (ja) * | 2019-09-20 | 2022-11-14 | 株式会社クボタ | 農業機械 |
| JP7511410B2 (ja) * | 2020-08-03 | 2024-07-05 | 株式会社Ihiアグリテック | 農作業支援システム |
| JP7365103B2 (ja) | 2020-12-24 | 2023-10-19 | 株式会社クボタ | 営農支援システム、位置情報生成方法、コンピュータプログラムおよび処理装置 |
| US12566542B2 (en) * | 2021-06-07 | 2026-03-03 | Precision Planting Llc | Systems and methods for providing field views including enhanced agricultural maps having a data layer and image data |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1596234A4 (en) | 2003-02-20 | 2006-03-22 | Sumitomo Electric Industries | COATED OPTICAL FIBER AND COATED OPTICAL FIBER WITH CONNECTOR |
| DE102004027895A1 (de) | 2004-06-09 | 2006-01-05 | Claas Selbstfahrende Erntemaschinen Gmbh | Ballenablagesystem |
| DE102005008105A1 (de) | 2005-02-21 | 2006-08-31 | Amazonen-Werke H. Dreyer Gmbh & Co. Kg | Elektronisches Maschinen-Management-System |
| DE102006011134A1 (de) | 2006-03-10 | 2007-09-27 | Deere & Company, Moline | Steuereinrichtung |
| US20130218421A1 (en) * | 2012-02-13 | 2013-08-22 | Leland K. Millsap | Semi-automatic tie table control system for a rotatable and tiltable tie table for a mid-size or big bale stack wagon |
| WO2014031355A1 (en) * | 2012-08-22 | 2014-02-27 | Agco Corporation | System for optimizing bale drop locations within a field |
| US9578811B2 (en) * | 2014-07-17 | 2017-02-28 | Deere & Company | Variable rate discharge system for crop accumulator |
| US9635814B2 (en) * | 2014-07-17 | 2017-05-02 | Deere & Company | Strategic crop placement using a virtual trip line for a harvester and crop accumulator combination |
| US9526212B2 (en) * | 2014-11-26 | 2016-12-27 | Cnh Industrial America Llc | Baler automatic stopping sequence |
| JP6747783B2 (ja) * | 2015-07-06 | 2020-08-26 | ヤンマーパワーテクノロジー株式会社 | 作業車連携システム |
| NL2015525B1 (en) | 2015-09-29 | 2017-04-20 | Forage Innovations Bv | Method and apparatus for forming round-cylindrical bales and depositing them on the ground at suitable locations. |
| US9930834B2 (en) * | 2015-10-29 | 2018-04-03 | Deere & Company | Agricultural baler control system |
| US10091943B2 (en) * | 2016-09-06 | 2018-10-09 | Deere & Company | Round module weighing using differential pressure sensing |
-
2017
- 2017-06-22 JP JP2017121879A patent/JP6728107B2/ja active Active
-
2018
- 2018-05-25 US US15/989,178 patent/US10687473B2/en active Active
- 2018-06-20 EP EP18178907.4A patent/EP3417698B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10687473B2 (en) | 2020-06-23 |
| EP3417698A1 (en) | 2018-12-26 |
| EP3417698B1 (en) | 2024-06-19 |
| JP2019004729A (ja) | 2019-01-17 |
| US20180368331A1 (en) | 2018-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6728107B2 (ja) | 牧草管理システム | |
| JP6968587B2 (ja) | 成形機及び牧草管理システム | |
| JP7726747B2 (ja) | 作業車両用経路生成システム | |
| US20200329632A1 (en) | Spraying support system for working machine | |
| AU2017277803B2 (en) | Customizable equipment library for command and control software | |
| JP5955254B2 (ja) | 作業車両操作システム及び作業車両操作プログラム | |
| CN107256579A (zh) | 对地作业车辆、对地作业信息显示方法、程序和记录介质 | |
| US20240308340A1 (en) | Method for displaying graphical data on an electronic display | |
| JP2019128661A (ja) | 農業支援システム | |
| US20210200528A1 (en) | Working machine and program update system for working machine | |
| JP6037911B2 (ja) | 携帯通信端末と連携する対地作業車両及び携帯通信端末用プログラム | |
| US20250374847A1 (en) | Travel assistance system and method of creating route | |
| CN115129042A (zh) | 用于自主作业机器许可的系统和方法 | |
| JP2021009523A (ja) | 作業表示装置及び作業機 | |
| US20240114817A1 (en) | Work machine monitoring system | |
| EP1193582A1 (fr) | Unité de pilotage "universelle" d'outils pour tracteur | |
| WO2023204246A1 (ja) | 森林管理装置、延焼防止システムおよび延焼防止方法 | |
| US11965742B2 (en) | Work support system and work support device | |
| US10904930B2 (en) | Communication system for working machine, mobile terminal, and communication processing method for working machine | |
| EP4643625A1 (en) | Field registration device, field registration method, and computer program | |
| JP7309602B2 (ja) | 作業支援システム | |
| JP7301739B2 (ja) | 作業支援システム | |
| EP3949711B1 (en) | Work map provision server | |
| WO2025142081A1 (ja) | 情報表示システム、作業車両および表示制御方法 | |
| WO2025142096A1 (ja) | 作業車両、制御装置、およびローダを制御する方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200701 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6728107 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |