本発明による作業工具をコードレスタイプのハンマドリル1に適用した実施の形態について、図1乃至図10に基づき、以下に詳細に説明する。
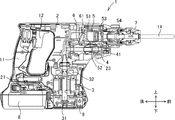
本実施の形態にかかるハンマドリル1は、その外郭をなす本体2を有する。図1に示すように、ハンマドリル1の本体2の一端部(前端部)には、工具取付部7が設けられている。工具取付部7には、作業用途に応じて、ドリル刃等の先端工具14を取り付け可能となっている(図2参照)。また、本体2の工具取付部7が設けられる一端部と反対側の他端部(後端部)には、作業者が把持するためのハンドル11が設けられており、ハンドル11にはトリガスイッチ12が設けられている。
以下の説明において、工具取付部7が設けられている方向を前方向とし、ハンドル11が設けられている側を後方向と定義する。また、図1の紙面上下方向をハンマドリル1の上下方向と定義する。更に、後方向からハンマドリル1を見た場合の右を右方向とし、逆方向を左方向と定義する。
図1に示すように、本体2のハンドル11の下部にはバッテリ装着部21が設けられている。バッテリ装着部21には、モータ3(後述)を駆動するための電源を供給するバッテリ8が着脱自在に装着される。バッテリ8は、図1において矢印で示されるように、本体2に対して前後方向における後方から、バッテリ装着部21に装着される。なお、本実施の形態においては、作業用途に応じて、出力18Vと36Vの2種類のバッテリ8をバッテリ装着部21に装着可能である。作業者は、バッテリ8がバッテリ装着部21に装着された状態において、ハンドル11を把持し、工具取付部7に装着された先端工具14を被削材に当接させた状態でトリガスイッチ12を操作することで、ハンマドリル1をコードレスで駆動することができる。なお、本体2には、作業用途に応じて、両手作業用にサイドハンドル(図示せず)を更に取り付けることも可能となっている。
本体2の左側面にはハンマドリル1の作業モードを切り替える切替スイッチ13が設けられている。作業者が切替スイッチ13を操作することで、ハンマドリル1の動作モードを、回転打撃モード、打撃モード、回転モードのいずれかに切り替えることが可能である。
図2に示すように、本体2の内部には、モータ3、駆動伝達部4、打撃機構部5、往復運動変換部6、電源供給部9が収容されている。
モータ3は本体2内の下端部に収容されている。モータ3はハンマドリル1の駆動源としてのブラシレスモータであり、バッテリ装着部21に装着されたバッテリ8から電力供給を受けることができるように構成されている。また、モータ3はトリガスイッチ12にも電気的に接続されている。モータ3は、その回転軸31が上下方向に延びるように配置されており、本体2に対して回転可能に支承されている。モータ3の回転軸31の上端部にはファン32が固定されている。
駆動伝達部4は、本体2内においてモータ3の上方に配置されている。駆動伝達部4は前後方向に延在する中間軸41を有している。中間軸41は、本体2に対して回転可能に支承されている。中間軸41は複数のギアを介してモータ3の回転軸31と接続されており、モータ3の回転力を受けて回転可能となっている。
打撃機構部5は、本体2内において駆動伝達部4の上方に配置されている。打撃機構部5は、主にシリンダ51、ピストン52と、打撃子53、中間子54を有している。シリンダ51は前後方向に延びる略円筒形状を有し、本体2の上部において、本体2に対して回転可能に支承されている。シリンダ51は駆動伝達部4の中間軸41と係合可能であり、中間軸41と係合した場合に中間軸41の回転力を受けて回転可能に構成されている。シリンダ51の先端部(前端部)は工具取付部7内に収容されている。また、シリンダ51内にはピストン52が摺動可能に配置されている。ピストン52は前後方向に延びる略円筒形状を有しており、打撃子53はピストン52内に前後方向に摺動可能に配置されている。中間子54はシリンダ51内において打撃子53の前方において前後方向に摺動可能に配置されている。打撃子53の前端は、中間子54の後端に当接可能であり、中間子54は工具取付部7に取り付けられた先端工具14の後端に対して当接される。
往復運動変換部6は駆動伝達部4と打撃機構部5とを接続するように配置されている。往復運動変換部6は主にアーム61を有している。アーム61は、中間軸41、シリンダ51と交差する方向に延びており、その上端部がピストン52の後端部と、その下端部が複数のボールを介して中間軸41の後方部分と接続されている。これにより、アーム61は、中間軸41を介して伝達されたモータ3の回転力を前後方向における直線的な往復運動に変換し、ピストン52へ伝達するよう構成されている。アーム61の往復運動によってピストン52がシリンダ51内において前後方向に往復運動する。打撃子53の往復運動によってシリンダ51内の空気が圧縮膨張されると、打撃子53が前後方向に往復運動する。打撃子53が往復運動すると、打撃子53の前端が中間子54の後端に当接し、中間子54を打撃する。中間子54が打撃されると、中間子54の前端が工具取付部7に取り付けられた先端工具14の後端を打撃する。このようにして、先端工具14に対して打撃力が付与される。つまり、工具取付部7の出力軸線は前後方向に一致する。
モータ3の回転力(駆動力)は、駆動伝達部4と往復運動変換部6とが同時にあるいは選択的に駆動されることで、打撃機構部5に対して回転力、打撃力、あるいは回転打撃力として伝達される。これにより、ハンマドリル1の3つの動作モードが実現される。
電源供給部9は、バッテリ装着部21に装着されたバッテリ8から供給される電力を本体2外へも供給可能とするための構成である。本実施の形態においては、電源供給部9は本体2に装着された集塵装置100へ電力を供給可能である(図8、9参照)。
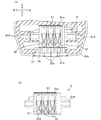
図2、3に示すように、電源供給部9は本体2内において、モータ3の近傍であって、本体2の前方下端部に設けられている。電源供給部9はバッテリ装着部21と電気的に接続されている。電源供給部9は、端子ホルダ91、端子部92、および弾性体93を備えている。端子ホルダ91は、その上面91aが開放された略箱形を有しており、左右各側面の略中央部分から左右方向外側へ突出する揺動軸91Aを有している。各揺動軸91Aは略円筒形を有しており、本体2に対して回転可能に支持されている。これにより、端子ホルダ91は本体2に対して揺動軸91Aの軸心を中心に揺動可能に支持されている。端子部92は端子ホルダ91内に収容されている。つまり、端子ホルダ91は端子部92を保持している。端子ホルダ91の上面(開放面)91aは、弾性体93によって被覆されている。端子ホルダ91の下面91bは、端子部92を露出可能に構成されている。弾性体93は弾性および電気的絶縁性を有する材料から構成される。本実施の形態においては、弾性体93はゴム製である。
図1、4に示すように、本体2の外表面を構成する左右の各側面の下部にはガイド溝22が形成されている。各ガイド溝22は本体2の左右各側面の外表面から内側へ凹む溝形状を有しており、上下方向に延在している。各ガイド溝22の下端部は本体2の底面2Bにおいて開口している。各ガイド溝22の底面2B上の開口端は、それぞれ工具取付部7から等距離に位置している。つまり、各ガイド溝22は左右方向、前後方向において同一の位置に形成されている。各ガイド溝22が本発明の溝部の一例であり、左右一対のガイド溝22が本発明のガイド溝の一例である。
本体2の前上方部分2Aは前方に突出しており、工具取付部7を支持している。切替スイッチ13は前上方部分2Aの左側面に設けられている。前上方部分2Aの下面には、上方へ凹んでいる本体側嵌合部の一例としての凹部23が形成されている。凹部23は下面視円形を有しており、前上方部分2Aの下面において左右方向略中央に位置している。
本体2の右側面における上下方向において略中央であって、前上方部分2Aの後下部に相当する位置には、排気口2cが形成されている(図1(b)参照)。
また、図1、4に示すように、本体2の左右各側面の外表面において、各ガイド溝22より前方の位置には係止部24が設けられている。本体2の右側面においては、係止部24は排気口2cの下方に位置する。各係止部24は側面視略矩形を有している。各係止部24は、本体2の左右の外表面から内側へ凹む係止溝25を備えている。各係止溝25の下面25aは、前後方向および水平方向に延在する面であって、後述の集塵装置100の係止爪119が係止される係止面として機能する(図10参照)。さらに、各係止溝25の内部であって、窪みの底面に相当する面には、複数の貫通孔からなる風窓25bが形成されている。風窓25bは本体2の内外を連通しており、本体2内に収容されるモータ3と左右方向において略対向するよう、モータ3の近傍において開口している。つまり、風窓25bは、本体2内に配置される端子ホルダ91の近傍に形成されている(図2も参照)。モータ3の回転軸31に固定されたファン32が回転することで、空気が風窓25bを介して本体2内に取り入れられる。風窓25bを介して本体2内に取り入れられた空気は、駆動中のモータ3を冷却し、その後排気口2cを通じて本体2外へ排出される。
本体2の外表面上において、前上方部分2Aより下方であって、かつ各ガイド溝22より前方の部分は、弾性材の一例であるエラストマ28Aによって被覆されている。エラストマ28Aは、各風窓25bを覆ってしまわないよう、各係止部24の周囲を囲むように設けられている。なお、図5に示されるように、本体2の外表面上に設けられるエラストマ28Aは、集塵装置100が本体2に装着された時、集塵装置100の各側壁111C(後述)によってほぼ覆われる。
図4に示すように、エラストマ28Aは本体2の底面2Bも被覆している。本体2の底面2Bには開口の一例たる端子孔27が形成されており、エラストマ28Aは端子孔27を避けるように本体2の底面2Bを被覆している。端子孔27は底面視矩形の開口であり、底面2Bから上方へ窪む凹形状を有している(図3(a)参照)。本体2内に配置される端子ホルダ91の下面91bは、端子孔27と対向する位置に設けられている。これにより、端子ホルダ91に保持された端子部92は、端子孔27を介して外部と電気的に接続可能となる。なお、端子孔27はエラストマ製のカバー29によって被覆可能な構成となっている。つまり、端子部92はカバー29によって被覆される。カバー29には複数のスリット29aが形成されている。
図1、4に示すように、本体2の外表面上においては、ハンドル11の表面もエラストマ28Bで被覆されている。エラストマ28Aとエラストマ28Bとは、本体2の外表面上に同時形成される。エラストマ28A、28Bは弾性を有しているため、本体2に対して加えられた衝撃を緩和し、本体2を保護することができる。また、エラストマ28A、28Bは、本体2の外表面上に同時形成されるため、各エラストマ28A、28Bをそれぞれ別々に本体2の外表面上に設ける場合と比較して、製造が容易であり、製造コストを低減することができる。
また、図5、6に示すように、本体2には補助装置の一例としての集塵装置100を着脱自在に装着可能である。つまり、ハンマドリル1は集塵装置100を本体2に装着した状態で使用することも、集塵装置100を本体2から取り外して、ハンマドリル1単体で使用することも可能な構成となっている。集塵装置100は、ドリル刃等の先端工具14が被削材に対して回転・打撃を行うことで被削材から生じる粉塵を吸引し、収集するための装置である。集塵装置100を装着することで、ハンマドリル1による穿孔等の作業効率の向上につながる。
具体的には、図6に示されるように、集塵装置100は、ハンマドリル1の本体2に対して下方から装着される。つまり、集塵装置100の本体2に対する装着方向(上下方向)は、バッテリ8の本体2のバッテリ装着部21に対する装着方向(左右方向)と直交する。
次に、集塵装置100の構成について図5乃至10を参照して説明する。
集塵装置100は、本体部110、スライダ部120、アダプタ部130を主に備えている。
図5、6に示すように、本体部110は側面視略矩形状の略箱形を有している。より詳細には、本体部110はハウジング111を有しており、このハウジング111が本体部110の外郭を形成している。ハウジング111は、後方部分(下方後端部)111Aと、前方部分111Bと、前方部分111Bと後方部分111Aとを接続する左右一対の側壁111Cと、一対の支持部111Dとを有する。
ハウジング111の後方部分111Aは、その内部に集塵装置100の駆動源である集塵用モータ112と、吸引した粉塵が回収される集塵ケース113とを収容している。
集塵用モータ112は、ハウジング111の後方部分111A内に配置されている。集塵用モータ112はその回転軸112Aが前後方向に延びるように、ハウジング111の後方部分111Aに対して回転可能に支承されている。図8に示されるように、集塵用モータ112の回転軸112Aの前端部にはファン112Bが固定されている。集塵用モータ112が駆動され、ファン112Bが回転することで、集塵装置100の吸引力が生成される。
ハウジング111の後方部分111Aの上面111a上には、集塵用端子部115が突設されている。集塵用端子部115は、集塵用モータ112と電気的に接続されている。集塵用端子部115は、集塵装置100がハンマドリル1の本体2に装着された時、本体2の底面2Bに形成された端子孔27と上下方向において対向する位置に設けられている。集塵装置100がハンマドリル1の本体2に装着されると、集塵用端子部115は、端子孔27を介して端子部92に受け入れられることで(図9参照)、本体2と集塵装置100とが互いに電気的に接続される。つまり、集塵装置100はハンマドリル1の本体2に装着されることで、本体2から電力を受けることが可能となっている。
集塵ケース113はハウジング111の前方部分111B内に配置されている。つまり、ハウジング111内において、集塵ケース113は集塵用モータ112の前方に配置されている。集塵ケース113は本体部110(ハウジング111)に対して着脱可能であり、回収した粉塵が蓄積された段階でハウジング111から取り出すことで粉塵を廃棄することが可能となっている。集塵ケース113にはフィルタ114が設けられている。集塵ケース113が本体部110に対して装着された時、フィルタ114は集塵用モータ112の回転軸112Aの前端部に固定されたファン112Bと対向する位置に位置するよう構成されている。
ハウジング111の前方部分111Bの上面111bには嵌合部の一例としての凸部116が形成されている。凸部116は上面111bの後端部近傍に形成されており、上面111bから上方へ突出する略円柱状を有している。集塵装置100が本体2に装着されると、凸部116は本体2に形成された凹部23に受け入れられ、凹部23と嵌合する。ハウジング111の前方部分111Bは、集塵装置100のスライダ部120を前後方向にスライド移動可能に収容している。
図7に示されるように、ハウジング111の一対の側壁111Cは、それぞれ後方部分111Aの上面111aの左右の縁部から上方へ延在し、その前端部は前上方へ向けて延び、前方部分111Bの左右の後縁部に接続されている。各側壁111Cの後端部には被ガイド凸部117が形成されている。各被ガイド凸部117は対応する側壁111Cの後端部の内面から左右方向内側へ突出し、上下方向に延在するリブ形状を有している。集塵装置100が本体2に装着されると、各被ガイド凸部117は本体2の各ガイド溝22に受け入れられる。
各側壁111Cには、複数の開口からなる集塵側風窓111cが形成されている。各集塵側風窓111cは各側壁111Cの上下方向における略中央に形成されており、左右方向において互いに対向する位置にある。また、集塵装置100がハンマドリル1の本体2に対して装着された状態において、各集塵側風窓111cは本体2の各係止部24の係止溝25内に形成された風窓25bと左右方向において対向する(図10参照)。
図7、9、10に示されるように、一対の支持部111Dは、後方部分111Aの上面111a上において、左右方向において互いに対向する位置に立設されている。各支持部111Dは略角柱形状を有しており、後方部分111Aの上面111aから上方に突設されている。集塵装置100がハンマドリル1の本体2に装着された時、各支持部111Dはハンマドリル1の本体2の底面2Bに対して下から当接可能な高さを有している。つまり、集塵装置100が本体2に装着された時、各支持部111Dは、その上面において本体2の底面2B上に設けられるエラストマ28Aと当接する。
ハウジング111は、更に、本体2との係止固定用に左右一対のラッチ部118も備えている。各ラッチ部118は上下方向に延在する側面視略矩形状を有している。各ラッチ部118は、対応する側壁111Cと後方部分111Aの左右方向の側壁とを上下方向に跨ぐように設けられている。図5、6に図示されるように、前後方向において、ラッチ部118は凸部116と被ガイド凸部117との間に位置している。また、各ラッチ部118は左右方向において互いに対向する位置に設けられる。
各ラッチ部118は係止部118A、操作部118B、連結部118C、および付勢部材118Dを備えている。係止部118Aはラッチ部118の上端部を構成する部分であり、その上端部には係止爪119を有している。係止爪119は係止部118Aの上端部から左右方向内側へ屈曲するように延びており、係止爪119は本体2に形成された係止部24の係止溝25の下面(係止面)25aと係合可能に構成されている(図10参照)。より具体的には、係止爪119の先端部(遊端部)は後面視略三角形を有しており、傾斜面119Aと下面119Bとを有する。係止爪119の傾斜面119Aは、左右方向内側へ向かうにつれて下方へ傾斜する面である。係止爪119の下面119Bは、左右方向、前後方向に延びる面であり、本体2の係止溝25の下面(係止面)25aと係合する係止面として機能する。また、各係止爪119の下面119Bは、対応する支持部111Dの上面と上下方向において対向している。
なお、側壁111Cには、係止部118Aを受け入れるための受入部111eが形成されている。各側壁111Cにおいて、受入部111eは集塵側風窓111cの下方かつ近傍に形成されている。また、左右方向において、各受入部111eは、対応する支持部111Dと隣接かつ対向する位置に形成されている。
操作部118Bはラッチ部118の下端部を構成する部分であり、作業者が集塵装置100を本体2に対して着脱する際に、操作する部分である。操作部118Bは対応する後方部分111Aの左右方向の側壁に対向する位置に設けられている。連結部118Cは係止部118Aと操作部118Bとの中間に位置する部分であり、係止部118Aと操作部118Bとを接続している。連結部118Cは揺動軸118Eを有している(図10参照)。揺動軸118Eは前後方向に延在する略円柱形を有しており、ハウジング111の後方部分111Aの左右各側壁に対して回転可能に支持されている。揺動軸118Eは連結部118Cの左右方向内側面上において、連結部118Cと一体に形成されている。係止部118A、操作部118B、連結部118Cは一体的に形成されている。
付勢部材118Dは操作部118Bとハウジング111の後方部分111Aの左右各側壁との間に設けられている。付勢部材118Dは、操作部118Bを常に左右方向外側へ向けて付勢している。以上の構成により、各ラッチ部118はハウジング111の後方部分111A、各側壁111Cに対して揺動軸118Eを中心に揺動可能であり、各係止部118Aの係止爪119は、付勢部材118Dの付勢力により、常に左右方向内側へ付勢されている。
図7に示すように、スライダ部120は前後方向に延びる略角筒形状を有している。スライダ部120は、ハウジング111の前方部分111Bに対して前後方向にスライド移動可能に支持されている。スライダ部120の前後方向の移動は、ハウジング111の前方部分111Bの内部側壁に形成された図示されないガイド機構によってガイドされる。つまり、スライダ部120は、後方へ移動すると前方部分111B内に受け入れられ、前方へ移動すると前方部分111Bから前方へ突出するよう構成されている。図8に示すように、スライダ部120の内部は中空であり、その内部空間にはホース121が収容されている。ホース121はスライダ部120の前後方向のスライド移動に応じて前後方向に伸縮可能な構成である。ホース121の内部には空間121aが画成されている。ホース121の内部空間121aは、本体部110に装着された集塵ケース113の内部空間と連通されている。
アダプタ部130は、スライダ部120の前端部から上方へ延びるように設けられている。アダプタ部130は作業時に被削材に対して当接される部分である。アダプタ部130内には空間130aが画成されており、スライダ部120のホース121内の空間121aと連通されている。アダプタ部130の先端部(上端部)131は前面視環状を有している(図7参照)。先端部131には空間130aと連通する開口131aが形成されている。環状の先端部131の径方向における辺縁部には、ゴム等の弾性を有する材料によって形成された封止部材132が設けられている。ハンマドリル1の本体2の駆動時には、環状の封止部材132が工具取付部7に保持される先端工具14の先端部(前端部)を囲んだ状態で、被削材に当接される。これにより、被削材から生じる粉塵等を、開口131aからアダプタ部130内に効率よく吸引することが可能となる。
吸引された粉塵等は、開口131a、アダプタ部130内の空間130a、スライダ部120のホース121内の空間121aを経由して、集塵ケース113まで運ばれ、集塵ケース113内に蓄積される。なお、集塵ケース113に設けられたフィルタ114が吸気中の粉塵を捕捉するため、吸引された粉塵は集塵用モータ112側へ移動することなく、確実に集塵ケース113内に蓄積される。フィルタ114により濾過された空気は、ファン112Bの近傍に形成される図示されない排気口から集塵装置100の外へ排出される。
上述の構成を有する集塵装置100は、以下のように、ハンマドリル1の本体2に対して着脱される。
図6を参照して、集塵装置100をハンマドリル1の本体2に対して装着するには、まず集塵装置100を本体2の下方に配置する。次に、集塵装置100の本体部110に形成された各被ガイド凸部117を本体2に形成された対応するガイド溝22に対して下方から挿入しつつ、ガイド溝22に沿って上方へ向けて集塵装置100を移動させていく。
各ガイド溝22に沿って集塵装置100を上方へ移動させて行くと、本体2の底面2Bが集塵装置100の各ラッチ部118の係止爪119の傾斜面119Aに対して上方から当接する。この状態で集塵装置100を更に上方へ移動させていくと、本体2の底面2Bは傾斜面119A上を摺接しながら下方へ移動する。この時、本体2の底面2Bが左右の各傾斜面119Aを下方へ押しながら移動するため、各係止爪119(係止部118A)は付勢部材118Dの付勢力に抗して左右方向外側へ揺動される。
集塵装置100を更に上方へ移動させていくと、本体2の底面2Bと傾斜面119Aとの当接は解除されるが、傾斜面119Aはその後も本体2の左右各側面に摺接しつつ各側面に沿って上方へ移動する。これに応じて、係止爪119(係止部118A)は付勢部材118Dの付勢力に抗して更に左右方向外側へ揺動する。
集塵装置100を更に上方へ移動させていくと、集塵装置100の本体部110の凸部116と本体2の凹部23とが嵌合する。つまり、凸部116と凹部23とは、ガイド溝22の延びる方向において嵌合する。各被ガイド凸部117の上端部が対応する各ガイド溝22の上端部に当接し、凸部116が凹部23に受け入れられると、本体2に対する集塵装置100のそれ以上の上方への移動が規制される。つまり、各被ガイド凸部117と各ガイド溝22との係合、凸部116と凹部23との嵌合により、集塵装置100は本体2に対して位置決めされる。
各ガイド溝22に沿って集塵装置100を上方へ移動させて行く過程において、集塵装置100の集塵用端子部115が本体2の底面2Bの端子孔27を介して端子部92に受け入れられる。これにより、集塵装置100の集塵用端子部115と本体2の端子部92とが電気的に接続される。つまり、集塵装置100の本体2に対する装着方向と集塵用端子部115の端子部92に対する接続方向とは一致している。集塵用端子部115と端子部92とが電気的に接続されることで、集塵用モータ112は本体2に装着されたバッテリ8から給電を受けることが可能となる。
各係止爪119が対応する本体2の係止部24の係止溝25と左右方向において対向すると、係止爪119(係止部118A)は付勢部材118Dの付勢力によって左右方向内側へ戻るように揺動する。これにより、図10に示すように、係止爪119の下面119Bと本体2の係止溝25の下面(係止面)25aとが係合される。これにより、集塵装置100が本体2に対して係止固定される。これで、集塵装置100の本体2に対する装着が完了する。
集塵装置100が本体2に対して装着された状態においては、本体2の係止部24が形成される左右側壁の外表面は集塵装置100の左右の各側壁111Cによって覆われる(図5参照)。しかしながら、図10において矢印で示すように、各側壁111Cに形成された集塵側風窓111cが本体2に形成された風窓25bと左右方向において対向するため、集塵装置100が本体2に装着されても、本体2内のモータ3を冷却するための冷却風を、集塵側風窓111c、風窓25bを介して通過させ、本体2内に取り入れることが可能となっている。
また、集塵装置100の本体2に対する装着が完了した状態においては、本体2の底面2Bはハウジング111の後方部分111Aの上面111aと対向する。つまり、本体2の底面2Bは、本体2に装着完了した集塵装置100と対向する対向面である。この時、本体2の底面2Bを被覆するエラストマ28Aは、対向するハウジング111の上面111a上に突設される支持部111Dの上面に下方から当接されることで、弾性変形した状態にある。このように、弾性を有するエラストマ28Aを集塵装置100と本体2との間に介在させることで、エラストマ28Aが本体2駆動時の本体2からの振動を吸収するため、本体2から集塵装置100への振動の伝達を抑えることができる。
また、本体2と端子ホルダ91との間に弾性を有する弾性体93が設けられるため、本体2と端子ホルダ91とが互いに直接接触することがない。そのため、ハンマドリル1の駆動時に発生する振動を弾性体93が吸収し、本体2から端子ホルダ91および端子ホルダ91が保持する端子部92への振動伝達が抑制される。つまり、弾性体93は、本体2と端子ホルダ91との間において緩衝材として機能する。本体2から端子ホルダ91への振動の伝達が緩和されるため、本体2の駆動中においても本体2と集塵装置100との間での電気的接触不良の発生を抑えることができ、本体2から集塵装置100への安定した電力供給が実現される。
集塵装置100を本体2から取り外すには、上記の反対の手順で行えばよい。すなわち、まず、作業者はラッチ部118の操作部118Bを押圧し、係止爪119の下面119Bを係止溝25の下面25a(係止面)から離間させ、係止爪119と係止溝25との係合を解除する。次に、操作部118Bを押圧したままで、集塵装置100を本体2に対して下方へ移動させる。集塵装置100を本体2に対して各ガイド溝22に沿って下方へ移動させると、凸部116と凹部23との嵌合が解除され、凸部116が凹部23から下方へ離間する。集塵装置100の係止爪119の下面119Bが本体2の係止部24の係止溝25の下面(係止面)25aより下方まで移動した時点で、作業者は操作部118Bから手を放してもよい。
集塵装置100を各ガイド溝22に沿って更に下方へ移動させていくと、集塵装置100の集塵用端子部115が本体2の端子部92から離間される。これにより、集塵装置100と本体2との間の電気的接続が解除される。集塵装置100を各ガイド溝22に沿って更に下方へ移動させていき、集塵装置100の被ガイド凸部117をガイド溝22から離間させる。これにより、集塵装置100の本体2からの離脱が完了する。
上述の本実施の形態によれば、集塵装置100をハンマドリル1の本体2に対して係止固定する係止部24が、集塵装置100の装着を案内するガイド溝22と集塵装置100の凸部116と嵌合する凹部23との間に設けられる。そのため、ガイド溝22と凹部23とによって集塵装置100を本体2に対して位置決めしつつ、ガイド溝22と凹部23との間において係止部24で集塵装置100を本体2に対して係止固定することで、装着された集塵装置100を本体2に対して安定して固定することができる。
また、作業時の本体2の振動により、本体2に装着された集塵装置100には、側面視において係止部24(係止部118A)を中心とする回転モーメントが働く場合がある。しかしながら、係止部24の前後に設けられるガイド溝22と凹部23とによって集塵装置100は本体2に対して位置決めされているため、そのような回転モーメントが働いたとしても、集塵装置100が本体2に対して係止部24を中心に回動したり、位置ずれを起こしたりすることがない。
また、集塵装置100の凸部116と本体2の凹部23とはガイド溝22の延びる方向において嵌合されるため、集塵装置100を本体2に対してガイド溝22に沿ってスライド移動させるだけで凸部116と凹部23とを嵌合させることができる。
また、ガイド溝22は、先端工具14を保持する工具取付部7の出力軸線(前後方向)と直交する方向、つまり上下方向に延在しており、集塵装置100はガイド溝22に沿って本体2に装着される。そのため、ガイド溝22が工具取付部7の出力軸線方向と平行に延在している場合と比較すると、本体2が先端工具14から工具取付部7を介して出力軸線方向に振動を受けたとしても、先端工具14からの振動が本体2を介して集塵装置100に伝わることを抑制することができる。
また、本実施の形態によれば、ガイド溝22は左右一対の溝部として形成されており、工具取付部7からそれぞれ等距離の位置に設けられる。そのため、集塵装置100の本体2への装着をバランスよく安定してガイドすることができる。
更に、本体2の外表面上の集塵装置100が装着される部分にはエラストマ28Aが設けられる。特に、本実施の形態においては、エラストマ28Aは装着された集塵装置100と対向する面である本体2の底面2Bも覆うように設けられる。底面2Bを被覆するエラストマ28Aは、集塵装置100の支持部111Dの上面によって下方から当接されることで弾性変形可能である。したがって、本実施の形態のように、集塵装置100が本体2の底面2Bに対して密着して装着される場合であっても、弾性を有するエラストマ28Aを集塵装置100と本体2との間に介在させることで、本体2駆動時の本体2からの振動を吸収することができ、本体2から集塵装置100への振動伝達を抑制・緩和することができる。このように本体2からの振動の伝達が抑えられることで、振動に起因する集塵装置100の破損防止、装置としての寿命の延命も期待できる。
また、エラストマ28Aを集塵装置100と本体2との間に介在させると、装着された集塵装置100が本体2に対して位置ずれする事態の発生も防止することができる。また、集塵装置100を装着せずに本体2を単体で使用する際に誤って本体2を地面等に落下させてしまったような場合にも、本体2の外表面上、特に底面2B上に設けられているエラストマ28Aの弾性により、本体2を落下の衝撃から保護することができる。
更に、本実施の形態においては、本体2と端子ホルダ91との間に弾性を有する弾性体93が緩衝材として設けられる。つまり、弾性体93がハンマドリル1の本体2駆動時に発生する振動を吸収するため、本体2から端子ホルダ91、端子部92への振動の伝達を抑制することができる。また、本体2の振動によって本体2と端子ホルダ91とが互いに擦れて摩耗することも防止される。更に、本体2から端子ホルダ91への振動の伝達が緩和されるため、本体2の駆動中においても本体2と集塵装置100との間での電気的接触不良の発生を抑えることができ、本体2から集塵装置100への安定した電力供給の実現につながる。つまり、集塵用モータ112が停止したり、断続的に駆動されたりといった本体2からの振動に起因する不具合の発生を避けることができ、集塵用モータ112の安定した駆動につながる。
更に、集塵装置100の本体2に対する装着方向において、弾性体93は端子部92について集塵装置100とは反対側、つまり、端子部92より下流側に設けられる。そのため、弾性体93は、集塵装置100の着脱に際して端子部92及び端子ホルダ91が集塵装置100(特に抜き差しされる集塵用端子部115)から受ける振動・衝撃を吸収・緩和することができ、端子部92および端子ホルダ91の破損を防ぐことができる。
また、弾性体93は電気的絶縁体である。そのため、本体2と端子ホルダ91との間において緩衝材として機能しつつ、本体2と端子ホルダ91との間の電気的絶縁を確保することも可能となり、更に安定した電気的接続が実現される。
また、端子部92への接続を可能とする端子孔27が形成される本体2の底面2Bは、集塵装置100をハンマドリル1の本体2に対して係止固定する係止部24の近傍に位置している。係止部24には集塵装置100の係止部118Aの係止爪119が係止される係止溝25が形成されている。つまり、集塵装置100が本体2に係止固定される係止部24の近傍において、集塵装置100を本体2に対して電気的に接続させることが可能となり、本体2から装着した集塵装置100への更なる安定した電力供給が可能となる。
なお、集塵装置100が本体2に装着された状態(図5の状態)において、端子ホルダ91は全体の略中央に位置することになる。そのため、端子ホルダ91が中央より離れた位置に設けられる場合と比較すると、集塵装置100は本体2からの振動の影響を受けにくく、安定した電力供給が実現されている。
また、端子ホルダ91は本体2の内外を連通する風窓25bの近傍に配置されるが、弾性体93が端子ホルダ91の上面91aを被覆しているため、排気口2c、風窓25bを介して本体2内に粉塵や異物が侵入しても、それらの粉塵等が端子ホルダ91内に侵入することがない。また、弾性体93は、端子ホルダ91の端子部92を露出可能な下面91bとは反対側の上面91aを被覆するため、端子ホルダ91内に粉塵や異物が侵入することを防ぐことができる。そのため、端子部92が粉塵や異物等に晒されにくくなり、安定的に電力供給を行うことができる。
なお、風窓25bは本体2の外表面より凹んだ係止部24の係止溝25内に形成されている。そのため、例えばハンマドリル1を先端工具14が上を向いた状態で使用する際、先端工具14が被削材を穿孔・打撃等することで発生する粉塵等が風窓25bを介して本体2内に侵入するのを抑制することができる。また、風窓25bは係止溝25内において集塵装置100の係止爪119が係止される下面(係止面)25aを避けた位置に形成されるため、風窓25bを係止溝25の外部に形成する場合と比較して、本体2を小型化でき、本体2内のスペースを有効に利用することができる。
また、エラストマ28Aは本体2のハンドル11の表面に設けられるエラストマ28Bと同時形成される。そのため、両エラストマ28A、28Bを別々に本体2の外表面上に設ける場合と比較すると、簡易に、かつ廉価でエラストマ28A、28Bを本体2の外表面上に形成することができる。
また、本実施の形態においては、端子ホルダ91の下面91bを被覆するエラストマ製のカバー29が設けられる。この構成により、カバー29は端子部92が不用意に粉塵や水分、異物等に晒されないよう保護し、下面91bから端子ホルダ91内に粉塵等が侵入することを防ぐことができる。また、ハンマドリル1を単独で使用する際、作業中に誤って本体2を地面等に落下させてしまった場合にも、端子部92が破損するのを防止することができる。
更に、カバー29には複数のスリット29aが形成されている。このため、カバー29が端子ホルダ91の下面91bを被覆したままの状態で集塵用端子部115がスリット29aを介して端子ホルダ91内に進入することが可能となる。したがって、集塵装置100の非装着時には端子部92を保護しつつ、集塵装置100の装着時にはカバー29をわざわざ外さなくても本体2側との電気的接続を確保することができる。
また、端子ホルダ91は、工具取付部7の出力軸線(前後方向)と直交する左右方向に延びる揺動軸91Aを中心に揺動可能に本体2に支持されている。この構成によれば、集塵装置100の集塵用端子部115が本体2の端子部92に対して若干ずれて挿入されるような場合、あるいは端子部92、集塵用端子部115のいずれかに製造時の公差があった場合であっても、挿入される集塵装置100の集塵用端子部115の動きに追従して端子ホルダ91が揺動するため、確実に集塵用端子部115を端子部92に受け入れることができる。
また、集塵装置100への電力供給を可能とする電源供給部9の端子部92は、集塵装置100の本体2に対する装着完了時に集塵装置100と対向する本体2の底面2Bに形成される端子孔27を介して集塵装置100に接続可能に設けられている。したがって、集塵装置100を本体2に対して装着するだけで、本体2の端子部92と集塵装置100(集塵用端子部115)との電気的接続が実現される。
また、本実施の形態によれば、ハンマドリル1のモータ3へはバッテリ装着部21に装着されたバッテリ8から電力が供給されるが、集塵装置100が本体2に装着された状態にあっては、集塵装置100の集塵用モータ112を駆動するための電力も、本体2のバッテリ装着部21に装着されたバッテリ8から供給される。そのため、ハンマドリル1を単独でコードレスで使用することができるだけでなく、集塵装置100をハンマドリル1に装着した状態でもコードレスで使用することができることになる。つまり、集塵装置100用のバッテリや電源を別途用意する必要がなく、更なる作業効率の向上につながる。
また、本実施の形態によれば、本体2のバッテリ装着部21に対するバッテリ8の装着方向(前後方向)と本体2に対する集塵装置100の装着方向(上下方向)とは互いに交差する。したがって、集塵装置100を本体2から取り外すことなく、集塵装置100の本体2への装着とは別途に独立して、バッテリ8の交換・取り付けを行うことが可能となる。
本発明による作業工具は、上述した実施の形態に限定されず、たとえば特許請求の範囲に記載された発明の要旨の範囲内で種々の変更が可能である。
例えば、本実施の形態においては、ハンマドリル1の本体2側に本体側嵌合部として凹部23を設け、集塵装置100のハウジング111側に嵌合部として凸部116を設けたが、本体側嵌合部として本体2側に凸部を、集塵装置100側に嵌合部として凹部を設けてもよい。
同様に、本実施の形態においては、本体2に凹形の溝形状のガイド溝22を設け、装着される集塵装置100に凸形状の被ガイド凸部117を設けたが、反対に、本体2に凸形状の案内ガイドを設け、これを受ける凹部が集塵装置100に形成される構成でもよい。ただ、本体2に凸形状のガイドを設けると、ハンマドリル1を単独で使用した際等に凸状のガイドが破損する可能性があると共に、凸状のガイドによってハンマドリル1が把持しにくくなってしまうため、本実施の形態のように本体2には凹形状のガイド溝を設ける方が好ましい。
また、本実施の形態においては、弾性体93は、集塵装置100の本体2に対する装着方向において、端子部92について集塵装置100とは反対側、つまり端子部92より下流側に設けられたが、本発明はこれに限定されない。例えば、端子ホルダ91の揺動軸91Aと本体2との間に弾性体を設けても、本体2から端子ホルダ91への振動の伝達を緩和することができる。
また、本実施の形態においては、弾性体93はゴム製であったが、弾性を有する電気的絶縁体であれば、ゴム製でなくてもよく、例えばスポンジ等でもよい。
また、本発明にかかる作業工具の本体に着脱自在に装着される補助装置は、本実施の形態のような被削材から発生した粉塵等を吸引する集塵装置に限定されない。例えば、被削材から発生した粉塵等を吹き飛ばす送風機能を有するブロワを補助装置として作業工具の本体に装着する構成でもよい。あるいは、ブロワ機能を有する集塵装置を補助装置として作業工具の本体に装着する構成でもよい。
本実施の形態にかかるハンマドリル1は、先端工具14に打撃力と回転力を与えられるものであったが、打撃力だけを与えるものであってもよいし、回転力だけを与えるものであってもよい。また、先端工具14は、ねじ部材を締め付けるためのドライバビットでもよいし、コンクリート、石材等に穴あけ、ハツリを施すためのドリルビットでもよい。
本実施の形態では作業工具としてハンマドリル1を例に説明したが、本発明はハンマドリル以外のモータで駆動される作業工具、例えば、電気ハンマ、電動ドリル、振動ドリル、ドライバドリル等の穿孔工具にも適用可能である。