JP6716607B2 - 螺旋構造の高周波アブレーションカテーテル及びその機器 - Google Patents
螺旋構造の高周波アブレーションカテーテル及びその機器 Download PDFInfo
- Publication number
- JP6716607B2 JP6716607B2 JP2017558612A JP2017558612A JP6716607B2 JP 6716607 B2 JP6716607 B2 JP 6716607B2 JP 2017558612 A JP2017558612 A JP 2017558612A JP 2017558612 A JP2017558612 A JP 2017558612A JP 6716607 B2 JP6716607 B2 JP 6716607B2
- Authority
- JP
- Japan
- Prior art keywords
- wire
- support
- electrode support
- spiral
- catheter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00862—Material properties elastic or resilient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00184—Moving parts
- A61B2018/00196—Moving parts reciprocating lengthwise
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/0091—Handpieces of the surgical instrument or device
- A61B2018/00916—Handpieces of the surgical instrument or device with means for switching or controlling the main function of the instrument or device
- A61B2018/0094—Types of switches or controllers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1435—Spiral
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1465—Deformable electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1467—Probes or electrodes therefor using more than two electrodes on a single probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1475—Electrodes retractable in or deployable from a housing
Description
前記カテーテル本体の前端には螺旋状の電極支持体が設けられ、前記電極支持体には複数の電極が設けられ、前記カテーテル本体の後端には制御ハンドルが設けられている、螺旋構造の高周波アブレーションカテーテルであって、
前記電極支持体と前記カテーテル本体とにおける何れかの管腔内には摺動可能な支持密着調節ワイヤが設けられ、
前記支持密着調節ワイヤは、制御ハンドルから離間する軟性部と、制御ハンドルに接近する剛性部とに分けられている、螺旋構造の高周波アブレーションカテーテル。
前記支持密着調節ワイヤの先端は、前記電極支持体を通過した後、前記電極支持体外に規制され、前記電極支持体の遠位端に対してカテーテルから離間する方向へ移動可能であり、
前記支持密着調節ワイヤの末端は、前記カテーテル本体を通過し、前記支持密着調節ワイヤの前後移動を制御するための前記制御ハンドルに固定されていることが好ましい。
前記支持密着調節ワイヤが、軟性部を電極支持体内に位置させるように後退するときに、前記電極支持体は、螺旋状に復元したことが好ましい。
各々の前記電極内には、高周波ケーブルと熱電対の素線が1組設けられ、前記高周波ケーブルは前記電極に接続され、前記熱電対の素線は前記電極と絶縁で設けられていることが好ましい。
長尺状のカテーテル本体を有し、
前記カテーテル本体の前端には螺旋状の電極支持体が設けられ、前記電極支持体には1つ又は複数の電極が設けられ、前記カテーテル本体の後端には制御ハンドルが設けられている、螺旋構造の高周波アブレーションカテーテルであって、
密着調節ワイヤの後部は、前記カテーテル本体における何れかの管腔内に摺動可能に設けられ、かつその後端が前記制御ハンドルに設けられた制御部品に接続されたり、前記制御ハンドルを通過した後に外付けの制御部品に接続され、
前記密着調節ワイヤの前部は、前記電極支持体から突き抜けた後に、前記電極支持体外に露出し、かつその前端が電極支持体内に戻って固定されていることが好ましい。
前記密着調節ワイヤの前端は、電極支持体内に戻った後に、前記電極支持体及び前記カテーテル本体内の管腔を経由してカテーテル本体の後端に戻り、前記制御ハンドルに固定されたり、前記制御部品に固定されていることが好ましい。
前記密着調節ワイヤは、支持ワイヤと兼用していることが好ましい。
各本のワイヤは、電極支持体において異なる位置から電極支持体内に入り込むことが好ましい。
或いは、前記複数本のワイヤの電極支持体への固定点が、同じであることが好ましい。
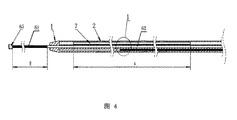
図1a乃至図1cから分かるように、本発明から提供される螺旋構造の高周波アブレーションカテーテルは、長尺状のカテーテル本体を含み、カテーテル本体前端には螺旋状の電極支持体が設けられている。電極支持体の螺旋状の最初の直径はΦDであり、最初の長さはA−1である(図1a及び図1b参照)。ΦDは、対象管腔の直径よりも大きいことが好ましい。カテーテル本体の後端には制御ハンドル8が設けられている(図1c参照)。実際の作製中、電極支持体はカテーテル本体と一体して作製されてもよく、電極支持体は、カテーテル本体の前端が螺旋状となる部分である。電極支持体も独立して作製された後にカテーテル本体と一体するように接続されてもよい。螺旋状の電極支持体は、アウターチューブ1と、アウターチューブ1に設けられた複数の電極2とを含む。電極2は、アウターチューブ1の外周に嵌設されたブロック状の電極又は環状の電極であってもよい。電極2の上面は、アウターチューブ1の外面と面一になり、又はアウターチューブ1の外面よりも略高くなってもよい。電極2の上面もアウターチューブ1の外面よりも低くなってもよい。
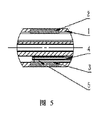
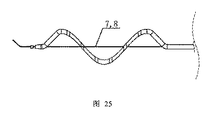
電極支持体のアウターチューブ1は、単体の管腔又は複数の管腔であってもよい。アウターチューブ1は、高分子材料又は金属材料、例えばステンレス鋼又は記憶合金などの材料を用いて作製することができる。アウターチューブ1は、直管材、棒材を用いて加工してなってもよく、A部を用いて螺旋状のような特殊形状のチューブに作製してもよい。図2及び図5に示されるように、アウターチューブ1が複数の管腔を使用する時に、電極支持体のアウターチューブ1内において中心孔に加え、複数の管腔が設けられている。そのうち、一部の管腔のそれぞれには、高周波ケーブル3と熱電対の素線4が1組設けられている。熱電対の素線4は、熱電対の素線の先端の絶縁層5によって被覆され、高周波ケーブル3及び電極2と隔離している。各組の高周波ケーブル3及び熱電対の素線4の先端は、個別電極内に設けられている。そのうち、高周波ケーブル3の先端は、電極2と緊密に溶接されている。熱電対の素線4の先端は溶接されて電極2と絶縁で設けられている。アウターチューブ1における何れかの管腔には、螺旋定型ワイヤ7がさらに設けられている。螺旋定型ワイヤ7は、支持電極支持体の螺旋状を支持するように螺旋変形領域であるA部に設けられている。勿論、電極支持体を直接に螺旋状に定型し、螺旋定型ワイヤ7を省略してもよい。例えば、記憶合金でアウターチューブを作製する時に、螺旋定型ワイヤ7を設けることも省略されてもよい。
図14乃至図19から分かるように、本発明から提供される螺旋構造の高周波アブレーションカテーテルは、長尺状のカテーテル本体を含む。カテーテル本体の前端には、螺旋状の電極支持体が設けられている。カテーテル本体の後端には、制御ハンドル20が設けられている(図19参照)。実際の作製中、電極支持体はカテーテル本体と一体して作製することができる。電極支持体は、カテーテル本体において前端が螺旋状に定型された部分である。電極支持体は、独立して作製された後にカテーテル本体と一体して接続することができる。
具体的に、図16に示される構造において、密着調節ワイヤ8の前端は、電極支持体前端に近い孔11から電極支持体内に戻った後に、電極支持体及びカテーテル本体内の管腔を経由して、密着調節ワイヤ8の後端とともにカテーテル本体の後端に戻り、その後に、密着調節ワイヤ8の前端と後端が共に図19に示されるような同一の制御部品22に固定され、或いは、密着調節ワイヤ8の前端と後端において一端が制御ハンドル20のケースに設けられている一方、他端が制御部品22に固定されている。制御部品22を引くことにより、電極支持体螺旋部の直径が変更されてもよい。
図20A乃至図23Bには、本発明から提供される第2実施例において、螺旋構造の高周波アブレーションカテーテルの異なる直径の管腔内における使用状態の模式図が表示されている。図20A及び図20Bに示されるように、螺旋状の電極支持体の最初の直径ΦBを10mmとし、首尾の電極の軸方向の間隔をAとする高周波アブレーションカテーテルを例にしている。それがΦ2mmのシース内に入るときに、電極支持体の形態は図21に示されるように略直線状になっている。それがシースから張り出してΦ4mmの血管に入るときに、電極支持体の螺旋状の直径ΦB−3は血管の直径による規制によって約4mmになっている。この場合、電極は、電極支持体の自然拡張の作用によって、管壁と緊密に接触し、首尾の電極の軸方向の間隔(A−3)>A(図22参照)となっている。図23A及び図23Bに示されるように、シースから張り出してΦ12mmの血管に入るときに、電極支持体は自然に拡張した後、その最初の直径ΦBが対象管腔の直径よりも小さいため、電極2が密着できない。この場合、密着調節ワイヤ8を後方へ引くことで、電極支持体の螺旋状の直径は、ΦB−4まで増大し、対象管腔の直径と同等となることができる。複数の電極2は、密着調節ワイヤ8の作用によって管壁と緊密に接触している。この場合、首尾の電極の軸方向の間隔はA−4まで減少し、複数の電極の軸方向の間隔は減少した。しかし、対象管腔の直径が大きいため、複数の電極のアブレーションによる作用が互いに影響しないようにしてもよく、過度なアブレーションになる可能性がない。なお、図20B及び図23Bに示された側面図から分かるように、電極支持体の螺旋状に均一に分布する複数の電極2は、密着調節ワイヤ8の作用によって、その軸方向の間隔が小さくなり、螺旋間隔が変化する可能性がない。
第3実施例
図27に示される高周波アブレーションカテーテルは第2実施例の高周波アブレーションカテーテルと構造的に類似している。図28は、第4実施例における高周波アブレーションカテーテルの支持ワイヤ7の構造を示している。
図29に示された高周波アブレーションカテーテルは、第2実施例の高周波アブレーションカテーテルと構造的に類似している。図30は、第5実施例における高周波アブレーションカテーテルの支持ワイヤ7及び密着調節ワイヤ8の構造を示している。そのうち、支持ワイヤ7、密着調節ワイヤ8と螺旋定型ワイヤ6は一体して設けられている。
この実施例では、カテーテル本体と電極支持体内に支持ワイヤ7が設けられている。なお、電極支持体内には螺旋定型ワイヤが独立して設けられていない。そのうち、図30に示されるように、予め定型することで、支持ワイヤ7の前部の電極支持体に対応する部分は螺旋状に定型され、螺旋定型部76を構成している。
図31Aと図31Bは、第6実施例における高周波アブレーションカテーテルの構造模式図である。
図32A乃至図34Bに示されるのは、本発明から提供される第7実施例における高周波アブレーションカテーテルの構造模式図である。そのうち、密着調節ワイヤ8の電極支持体外に露出している部分と、電極支持体との間に固定点がある。密着調節ワイヤ8の前端及び後端は、カテーテル本体の後端から突き抜け、制御ハンドル20に設けられたり制御ハンドル20外に設けられている対応する制御部品に固定されている。
第8実施例では、高周波アブレーションカテーテル内に設けられた密着調節ワイヤ8は複数本のワイヤからなっている。そのうち、各本のワイヤの前端は電極支持体に固定され、後端は外側から電極支持体における一部の螺旋部を迂回した後に電極支持体又はカテーテル本体内に入り、その後にカテーテル本体の管腔を経由してカテーテル本体の末端から突き抜け、制御ハンドル20に設けられた対応する制御部品に固定されたり、制御ハンドル20を通過した後に外付けの対応する制御部品に設けられている。複数本のワイヤはそれぞれ、電極支持体において異なる螺旋部の直径を独立して制御するためのものである。
2 電極
3 高周波ケーブル
4 素線
5 絶縁層
6 螺旋定型ワイヤ
7 支持ワイヤ
8 密着調節ワイヤ
9 ボタン制御部品
10 第2制御部品
11 孔
12 孔
13 固定点
15 孔
20 制御ハンドル
21 ボタン制御部品
22 制御部品
25 制御部品
61 軟性部
62 剛性部
63 現像ヘッド
64 ストレートヘッド型フレキシブルガイドワイヤ
65 エルボ型フレキシブルガイドワイヤ
66 分岐調節ワイヤ
67 末端
68 末端
70 末端
76 螺旋定型部
80 後端
81 前部
82 後部
83 固定点
84 ワイヤ
85 ワイヤ
Claims (10)
- 長尺状のカテーテル本体を有し、
前記カテーテル本体の前端には螺旋状の電極支持体が設けられ、前記電極支持体には複数の電極が設けられ、前記カテーテル本体の後端には制御ハンドルが設けられている、螺旋構造の高周波アブレーションカテーテルであって、
前記電極支持体と前記カテーテル本体とにおける何れかの管腔内には摺動可能な支持密着調節ワイヤが設けられ、
前記支持密着調節ワイヤは、制御ハンドルから離間する軟性部と、制御ハンドルに接近する剛性部とに分けられており、
前記支持密着調節ワイヤが、剛性部を電極支持体内の長さ方向全体に位置させ、軟性部を電極支持体外に位置させるように前方へ移動するときに、前記電極支持体は、前記支持密着調節ワイヤの剛性部の作用によって、螺旋状の直径が小さくなり、長さが大きくなり、直線状になる傾向があり、
前記支持密着調節ワイヤが、軟性部を電極支持体内の長さ方向全体に位置させるように後退するときに、前記電極支持体は、螺旋状に復元することを特徴とする螺旋構造の高周波アブレーションカテーテル。 - 前記支持密着調節ワイヤの先端は、前記電極支持体を通過した後、前記電極支持体外に規制され、前記電極支持体の遠位端に対してカテーテルから離間する方向へ移動可能であり、
前記支持密着調節ワイヤの末端は、前記カテーテル本体を通過し、前記支持密着調節ワイヤの前後移動を制御するための前記制御ハンドルに固定されていることを特徴とする請求項1に記載の螺旋構造の高周波アブレーションカテーテル。 - 前記制御ハンドルには、前記支持密着調節ワイヤの末端に固定されたボタン移動部品が設けられ、ボタン移動部品の前記制御ハンドルにおける位置を変更することで、前記支持密着調節ワイヤの移動を制御することを特徴とする請求項1に記載の螺旋構造の高周波アブレーションカテーテル。
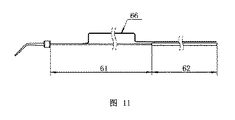
- 前記支持密着調節ワイヤは、後方に延伸する分岐調節ワイヤを有し、前記分岐調節ワイヤの先端は、前記支持密着調節ワイヤの先端に固定され、或いは、前記分岐調節ワイヤの先端は、前記軟性部における何れかの部位に固定され、或いは、前記分岐調節ワイヤは、前記軟性部から外側へ分岐された細いワイヤであり、前記分岐調節ワイヤの後端は、前記電極支持体のアウターチューブに設けられた孔から突き抜けるとともに前記電極支持体又はカテーテル本体に設けられた孔から入り込み、その後に、前記支持密着調節ワイヤの剛性部と並んで前記カテーテル本体内の管腔に沿ってチューブ外に延伸し、制御ハンドル内に入り、第2制御部品に固定されていることを特徴とする請求項1に記載の螺旋構造の高周波アブレーションカテーテル。
- 前記軟性部の長さは、前記電極支持体のアウターチューブの長さ以上であることを特徴とする請求項1に記載の螺旋構造の高周波アブレーションカテーテル。
- 前記軟性部の前端には、ストレートヘッド型フレキシブルガイドワイヤ又はエルボ型フレキシブルガイドワイヤが設けられていることを特徴とする請求項1に記載の螺旋構造の高周波アブレーションカテーテル。
- 前記軟性部は、前記剛性部よりも直径が小さい細いワイヤで作製され、前記軟性部と前記剛性部は、一体成形したり、直径の異なる2本の細いワイヤによって組み付けられてなることを特徴とする請求項1に記載の螺旋構造の高周波アブレーションカテーテル。
- 前記軟性部は、ばね構造又はフレキシブルホース構造を用いていることを特徴とする請求項1に記載の螺旋構造の高周波アブレーションカテーテル。
- 前記電極支持体内には、螺旋定型ワイヤが設けられていることを特徴とする請求項1に記載の螺旋構造の高周波アブレーションカテーテル。
- 請求項1から請求項9の何れか一項に記載の高周波アブレーションカテーテルと、前記高周波アブレーションカテーテルに接続された高周波アブレーションホストとを含むことを特徴とする高周波アブレーション機器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020072220A JP6987920B2 (ja) | 2015-02-03 | 2020-04-14 | 螺旋構造の高周波アブレーションカテーテル及びその機器 |
Applications Claiming Priority (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201510057095.5A CN104605930A (zh) | 2014-12-29 | 2015-02-03 | 一种螺旋结构的射频消融导管及其设备 |
| CN201510057095.5 | 2015-02-03 | ||
| CN201510129947.7 | 2015-03-23 | ||
| CN201510129947.7A CN104688334A (zh) | 2015-03-23 | 2015-03-23 | 具有贴壁调节丝的螺旋型射频消融导管及其设备 |
| CN201520434410.7 | 2015-06-19 | ||
| CN201510350172.6 | 2015-06-19 | ||
| CN201510350172.6A CN104939918B (zh) | 2015-03-23 | 2015-06-19 | 具有贴壁调节丝的螺旋型射频消融导管及其设备 |
| CN201510349237.5 | 2015-06-19 | ||
| CN201520433569.7U CN204734547U (zh) | 2015-03-23 | 2015-06-19 | 具有贴壁调节丝的螺旋型射频消融导管及其设备 |
| CN201520434410.7U CN204971568U (zh) | 2015-06-19 | 2015-06-19 | 一种螺旋结构的射频消融导管及其设备 |
| CN201520433569.7 | 2015-06-19 | ||
| CN201510349237.5A CN105193497B (zh) | 2014-12-29 | 2015-06-19 | 一种螺旋结构的射频消融导管及其设备 |
| PCT/CN2016/073378 WO2016124138A1 (zh) | 2015-02-03 | 2016-02-03 | 一种螺旋结构的射频消融导管及其设备 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020072220A Division JP6987920B2 (ja) | 2015-02-03 | 2020-04-14 | 螺旋構造の高周波アブレーションカテーテル及びその機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018503490A JP2018503490A (ja) | 2018-02-08 |
| JP2018503490A5 JP2018503490A5 (ja) | 2019-03-22 |
| JP6716607B2 true JP6716607B2 (ja) | 2020-07-01 |
Family
ID=56563470
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017558612A Active JP6716607B2 (ja) | 2015-02-03 | 2016-02-03 | 螺旋構造の高周波アブレーションカテーテル及びその機器 |
| JP2020072220A Active JP6987920B2 (ja) | 2015-02-03 | 2020-04-14 | 螺旋構造の高周波アブレーションカテーテル及びその機器 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020072220A Active JP6987920B2 (ja) | 2015-02-03 | 2020-04-14 | 螺旋構造の高周波アブレーションカテーテル及びその機器 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10646272B2 (ja) |
| EP (2) | EP3254635B1 (ja) |
| JP (2) | JP6716607B2 (ja) |
| ES (1) | ES2955930T3 (ja) |
| WO (1) | WO2016124138A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020116423A (ja) * | 2015-02-03 | 2020-08-06 | 上▲海▼魅▲麗▼▲緯▼叶医▲療▼科技有限公司 | 螺旋構造の高周波アブレーションカテーテル及びその機器 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2788078B1 (en) | 2011-12-09 | 2020-09-02 | Metavention, Inc. | Therapeutic neuromodulation of the hepatic system |
| US10524859B2 (en) | 2016-06-07 | 2020-01-07 | Metavention, Inc. | Therapeutic tissue modulation devices and methods |
| WO2020224972A1 (en) * | 2019-05-07 | 2020-11-12 | Vascomed Gmbh | Mapping and ablation catheter with multiple loop segments |
| US11712295B2 (en) | 2019-12-30 | 2023-08-01 | Biosense Webster (Israel) Ltd. | Multi-purpose sensing and radiofrequency (RF) ablation spiral electrode for catheter |
| CN115363689A (zh) * | 2021-05-21 | 2022-11-22 | 上海微创心通医疗科技有限公司 | 一种医用导管及医用装置 |
| CN113384319B (zh) * | 2021-06-02 | 2023-04-25 | 上海腾复医疗科技有限公司 | 一种导管 |
| CN114271928B (zh) * | 2021-12-26 | 2023-07-28 | 上海安通医疗科技有限公司 | 一种可用于桡动脉的组合式消融导管 |
| CN114271929B (zh) * | 2021-12-26 | 2023-04-07 | 上海安通医疗科技有限公司 | 一种适用于桡动脉的自控制消融导管 |
| CN115024812A (zh) * | 2022-01-27 | 2022-09-09 | 苏州心岭迈德医疗科技有限公司 | 一种支撑杆可调的消融导管及设备 |
| CN117547347A (zh) * | 2024-01-11 | 2024-02-13 | 乐普(北京)医疗器械股份有限公司 | 一种射频消融装置 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5921924A (en) * | 1993-12-03 | 1999-07-13 | Avitall; Boaz | Mapping and ablation catheter system utilizing multiple control elements |
| US5702438A (en) * | 1995-06-08 | 1997-12-30 | Avitall; Boaz | Expandable recording and ablation catheter system |
| US6332880B1 (en) * | 1996-12-19 | 2001-12-25 | Ep Technologies, Inc. | Loop structures for supporting multiple electrode elements |
| JP2002501769A (ja) * | 1997-10-30 | 2002-01-22 | イー.ピー. テクノロジーズ, インコーポレイテッド | プルワイヤを備えるカテーテル遠位アセンブリ |
| CA2391488C (en) * | 1999-11-22 | 2012-04-03 | Boston Scientific Limited | Loop structures for supporting diagnostic and therapeutic elements in contact with body tissue |
| US6613046B1 (en) * | 1999-11-22 | 2003-09-02 | Scimed Life Systems, Inc. | Loop structures for supporting diagnostic and therapeutic elements in contact with body tissue |
| EP1895927A4 (en) * | 2005-06-20 | 2011-03-09 | Medtronic Ablation Frontiers | ABLATION CATHETER |
| US20090264770A1 (en) * | 2008-04-17 | 2009-10-22 | Omnisonics Medical Technologies, Inc. | Medical Systems and Related Methods |
| CN201469401U (zh) * | 2009-08-21 | 2010-05-19 | 刘小青 | 螺旋状环肾动脉肾交感神经射频消融电极导管 |
| US9387035B2 (en) * | 2009-08-25 | 2016-07-12 | Medtronic Ablation Frontiers Llc | Bi-modal catheter steering mechanism |
| EP3100696B1 (en) * | 2010-10-25 | 2023-01-11 | Medtronic Ardian Luxembourg S.à.r.l. | Catheter apparatuses having multi-electrode arrays for renal neuromodulation |
| US9220433B2 (en) * | 2011-06-30 | 2015-12-29 | Biosense Webster (Israel), Ltd. | Catheter with variable arcuate distal section |
| CN102488552B (zh) | 2011-12-15 | 2015-04-15 | 四川锦江电子科技有限公司 | 可操控螺旋形电生理导管 |
| US9717555B2 (en) * | 2012-05-14 | 2017-08-01 | Biosense Webster (Israel), Ltd. | Catheter with helical end section for vessel ablation |
| CN103830001B (zh) | 2012-11-23 | 2016-12-21 | 四川锦江电子科技有限公司 | 可控弯螺旋消融导管 |
| US20160256216A1 (en) * | 2013-03-11 | 2016-09-08 | Medtronic Ardian Luxembourg S.A.R.L. | Catheter apparatuses for pulmonary artery neuromodulation |
| US9179974B2 (en) * | 2013-03-15 | 2015-11-10 | Medtronic Ardian Luxembourg S.A.R.L. | Helical push wire electrode |
| US9848948B2 (en) * | 2013-03-15 | 2017-12-26 | Biosense Webster (Israel) Ltd. | Catheter adapted for use with guide wire for accessing vessels |
| CN104095679A (zh) * | 2013-04-12 | 2014-10-15 | 上海微创电生理医疗科技有限公司 | 多电极消融导管 |
| CN203280485U (zh) * | 2013-04-12 | 2013-11-13 | 上海微创电生理医疗科技有限公司 | 多电极消融导管 |
| WO2014172396A2 (en) | 2013-04-16 | 2014-10-23 | Transmed7, Llc | Methods, devices and therapeutic platform for automated, selectable, soft tissue resection |
| CN104605930A (zh) | 2014-12-29 | 2015-05-13 | 上海魅丽纬叶医疗科技有限公司 | 一种螺旋结构的射频消融导管及其设备 |
| CN204971568U (zh) | 2015-06-19 | 2016-01-20 | 上海魅丽纬叶医疗科技有限公司 | 一种螺旋结构的射频消融导管及其设备 |
| EP3254635B1 (en) * | 2015-02-03 | 2023-08-30 | Shanghai Golden Leaf Med Tec Co., Ltd. | Radio-frequency ablation catheter having spiral structure, and equipment thereof |
| CN104688334A (zh) | 2015-03-23 | 2015-06-10 | 上海魅丽纬叶医疗科技有限公司 | 具有贴壁调节丝的螺旋型射频消融导管及其设备 |
-
2016
- 2016-02-03 EP EP16746133.4A patent/EP3254635B1/en active Active
- 2016-02-03 JP JP2017558612A patent/JP6716607B2/ja active Active
- 2016-02-03 ES ES16746133T patent/ES2955930T3/es active Active
- 2016-02-03 WO PCT/CN2016/073378 patent/WO2016124138A1/zh active Application Filing
- 2016-02-03 EP EP18162451.1A patent/EP3360497A1/en active Pending
- 2016-02-03 US US15/548,672 patent/US10646272B2/en active Active
-
2020
- 2020-04-14 JP JP2020072220A patent/JP6987920B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020116423A (ja) * | 2015-02-03 | 2020-08-06 | 上▲海▼魅▲麗▼▲緯▼叶医▲療▼科技有限公司 | 螺旋構造の高周波アブレーションカテーテル及びその機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3254635B1 (en) | 2023-08-30 |
| EP3360497A1 (en) | 2018-08-15 |
| ES2955930T3 (es) | 2023-12-11 |
| US10646272B2 (en) | 2020-05-12 |
| WO2016124138A1 (zh) | 2016-08-11 |
| EP3254635A1 (en) | 2017-12-13 |
| JP6987920B2 (ja) | 2022-01-05 |
| EP3254635C0 (en) | 2023-08-30 |
| JP2020116423A (ja) | 2020-08-06 |
| US20170354462A1 (en) | 2017-12-14 |
| EP3254635A4 (en) | 2018-07-25 |
| JP2018503490A (ja) | 2018-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6716607B2 (ja) | 螺旋構造の高周波アブレーションカテーテル及びその機器 | |
| US6837867B2 (en) | Steerable catheter with reinforced tip | |
| WO2016019761A1 (zh) | 具有网管状支架结构的射频消融导管及其设备 | |
| US20190060002A1 (en) | Sensor assembly tethered within catheter wall | |
| US6652491B1 (en) | Steerable stylet | |
| WO2013056672A1 (zh) | 肾动脉射频消融导管 | |
| US9861433B2 (en) | Helical-shaped ablation catheter and methods of use | |
| CN108245247B (zh) | 具有用于可变弧形远侧组件的渐缩支撑构件的导管 | |
| CN105193497A (zh) | 一种螺旋结构的射频消融导管及其设备 | |
| EP3295885B1 (en) | Corrugated radiofrequency ablation catheter having wall-attaching adjustment wires and apparatus thereof | |
| JP2023534571A (ja) | 可動ガイドワイヤを有する高周波アブレーションカテーテル | |
| JP6836247B2 (ja) | 波紋型高周波アブレーションカテーテル | |
| CN105125281B (zh) | 一种波纹型射频消融导管及其设备 | |
| CN105078571A (zh) | 具有贴壁调节丝的波纹型射频消融导管及其设备 | |
| CN107569283B (zh) | 具有贴壁调节丝的螺旋型射频消融导管及其设备 | |
| CN204971568U (zh) | 一种螺旋结构的射频消融导管及其设备 | |
| CN104127233B (zh) | 一种用于调节神经的装置 | |
| US20230129393A1 (en) | Corrugated radiofrequency ablation catheter having wall-attaching adjustment wire and apparatus thereof | |
| JP2013521960A (ja) | 方向付け可能端を有する柔軟な細長い構造体の製造方法 | |
| CN114271928A (zh) | 一种可用于桡动脉的组合式消融导管 | |
| JP2020156926A (ja) | カテーテル |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200511 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200610 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6716607 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |