JP6714543B2 - 超音波センサ及び物体検知システム - Google Patents
超音波センサ及び物体検知システム Download PDFInfo
- Publication number
- JP6714543B2 JP6714543B2 JP2017105944A JP2017105944A JP6714543B2 JP 6714543 B2 JP6714543 B2 JP 6714543B2 JP 2017105944 A JP2017105944 A JP 2017105944A JP 2017105944 A JP2017105944 A JP 2017105944A JP 6714543 B2 JP6714543 B2 JP 6714543B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- wave
- transmission
- sensors
- ultrasonic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/06—Systems determining the position data of a target
- G01S15/08—Systems for measuring distance only
- G01S15/10—Systems for measuring distance only using transmission of interrupted, pulse-modulated waves
- G01S15/102—Systems for measuring distance only using transmission of interrupted, pulse-modulated waves using transmission of pulses having some particular characteristics
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Description
本実施形態に係る物体検知システムは、移動体である車両に搭載されるものであり、超音波センサを備えている。超音波センサは、所定の送受信機会ごとに超音波である探査波を送信し、移動体の周囲に存在する物体により反射された反射波を受信波として受信し、探査波の送信から受信波の受信までの時間を測定することにより、車両と物体との距離を求める。そして、車両と物体との距離が所定距離よりも近い場合に、車両の運転者に対して物体との接近を報知したり、車両が備える制動装置を作動させたりする。
本実施形態では、物体検知システムに含まれる超音波センサの配置について具体化している。図5を参照して、物体検知システムに含まれる超音波センサの配置について説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、各センサにおける送信位相の一部を第2実施形態と異ならせている。図6を参照して、本実施形態に係る物体検知システムについて説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、各センサにおける送信位相の一部を第2実施形態と異ならせている。図7を参照して、本実施形態に係る物体検知システムについて説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、処理の一部を第2実施形態と異ならせている。本実施形態における処理について、図8を参照して説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、各センサにおける送信位相の一部を第2実施形態と異ならせている。図9を参照して、本実施形態に係る物体検知システムについて説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、各センサにおける送信位相の一部を第2実施形態と異ならせている。図10を参照して、本実施形態に係る物体検知システムについて説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、各センサにおける送信位相の一部を第2実施形態と異ならせている。図11を参照して、本実施形態に係る物体検知システムについて説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、処理の一部を第2実施形態と異ならせている。本実施形態における処理について、図13を参照して説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、処理の一部を第2実施形態と異ならせている。本実施形態における処理について、図14を参照して説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、処理の一部を第2実施形態と異ならせている。本実施形態における処理について、図15を参照して説明する。
本実施形態では、物体検知システム全体の構成は第2実施形態と共通しており、処理の一部を第2実施形態と異ならせている。本実施形態における処理について、図16を参照して説明する。
・各実施形態において、探査波の位相を切り替えるものとしたが、探査波の位相を切り替える代わりに、探査波の周波数を切り替えるものとしてもよい。この場合、探査波の周波数についても、位相と同様に送信特性、受信特性と称することができる。
Claims (22)
- 所定の送信機会毎に探査波を送信する超音波センサ(10)であって、
圧電素子(141)を有し、その圧電素子へ電力が供給されることで共振して前記探査波の送信を行う送信部(14)と、
前記圧電素子へ電力を供給する送信回路(13)と、
1送信機会において、前記送信回路を駆動して前記送信部から前記探査波を送信させ、前記探査波の送信開始から所定時間経過後に、位相、周波数、周期及び振幅の少なくともひとつを含む送信特性を切り替えて前記送信回路を駆動する送信制御部(12)と、を備え、
前記送信制御部は、前記送信特性の切り替え時に、前記送信回路から前記圧電素子への電力の供給を中断するオフ期間を設け、送信機会毎に前記オフ期間の有無を切り替える、超音波センサ。 - 前記送信回路は、コンデンサ(137)を有し、そのコンデンサに蓄積された電力を前記圧電素子へ供給する、請求項1に記載の超音波センサ。
- 前記オフ期間の長さは、前記探査波の周期の第1所定倍よりも長く、且つ、前記探査波の周期の第2所定倍よりも短い、請求項1又は2に記載の超音波センサ。
- 前記第1所定倍は4倍である、請求項3に記載の超音波センサ。
- 前記オフ期間の長さは、前記探査波の振幅が第1所定値を下回るまでの時間よりも長く、且つ、前記探査波の振幅が前記第1所定値よりも小さい第2所定値を下回るまでの時間よりも短い、請求項1又は2に記載の超音波センサ。
- 請求項1〜5のいずれか1項に記載の超音波センサを複数備え、車両に搭載される物体検知システムであって、
前記送信部は、さらに、前記探査波の反射波を含む受信波を受信する送受信部として機能し、
前記受信波の位相、周波数、周期及び振幅の少なくともひとつを含む受信特性を取得する特性取得部(18)と、を備え、
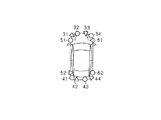
前記車両の前端部には、左側から順に前記超音波センサである第1〜第4前方センサ(31〜34)が互いに間隔を開けて設けられており、
前記車両の後端部には、左側から順に前記超音波センサである第1〜第4後方センサ(41〜44)が互いに間隔を開けて設けられており、
前記車両の左側方には、前側から順に前記超音波センサである第1,第2左側方センサ(51,52)が間隔を開けて設けられており、
前記車両の右側方には、前側から順に前記超音波センサである第1,第2右側方センサ(61,62)が間隔を開けて設けられており、
前記超音波センサは、前記送信特性を第1設定と第2設定とに所定期間ごとに切り替え、
前記第1設定では、前記第1〜第4前方センサ(31〜34)及び前記第1〜第4後方センサ(41〜44)は、前記送信特性である第1送信特性で前記探査を送信し、前記第1,第2左側方センサ(51,52)及び前記第1,第2右側方センサ(61,62)は、前記第1送信特性と異なる前記送信特性である第2送信特性で前記探査を送信し、
前記第2設定では、前記第1〜第4前方センサ(31〜34)及び前記第1〜第4後方センサ(41〜44)は、前記第2送信特性で前記探査を送信し、前記第1,第2左側方センサ(51,52)及び前記第1,第2右側方センサ(61,62)は、前記第1送信特性で前記探査を送信し、
前記受信波がいずれの超音波センサから送信された探査波の反射波であるかを判定する判定部(23)を備える、物体検知システム。 - 所定の送信機会毎に探査波を送信する超音波センサ(10)であって、
圧電素子(141)を有し、その圧電素子へ電力が供給されることで共振して前記探査波の送信を行う送信部(14)と、
前記圧電素子へ電力を供給する送信回路(13)と、
1送信機会において、前記送信回路を駆動して前記送信部から前記探査波を送信させ、前記探査波の送信開始から所定時間経過後に、位相、周波数、周期及び振幅の少なくともひとつを含む送信特性を切り替えて前記送信回路を駆動する送信制御部(12)と、を備え、
前記送信制御部は、前記送信特性の切り替え時に、前記送信回路から前記圧電素子への電力の供給を中断するオフ期間を設ける、超音波センサを複数備え、車両に搭載される物体検知システムであって、
前記送信部は、さらに、前記探査波の反射波を含む受信波を受信する送受信部として機能し、
前記受信波の位相、周波数、周期及び振幅の少なくともひとつを含む受信特性を取得する特性取得部(18)と、を備え、
前記車両の前端部には、左側から順に前記超音波センサである第1〜第4前方センサ(31〜34)が互いに間隔を開けて設けられており、
前記車両の後端部には、左側から順に前記超音波センサである第1〜第4後方センサ(41〜44)が互いに間隔を開けて設けられており、
前記車両の左側方には、前側から順に前記超音波センサである第1,第2左側方センサ(51,52)が間隔を開けて設けられており、
前記車両の右側方には、前側から順に前記超音波センサである第1,第2右側方センサ(61,62)が間隔を開けて設けられており、
前記超音波センサは、前記送信特性を第1設定と第2設定とに所定期間ごとに切り替え、
前記第1設定では、前記第1〜第4前方センサ(31〜34)及び前記第1〜第4後方センサ(41〜44)は、前記送信特性である第1送信特性で前記探査を送信し、前記第1,第2左側方センサ(51,52)及び前記第1,第2右側方センサ(61,62)は、前記第1送信特性と異なる前記送信特性である第2送信特性で前記探査を送信し、
前記第2設定では、前記第1〜第4前方センサ(31〜34)及び前記第1〜第4後方センサ(41〜44)は、前記第2送信特性で前記探査を送信し、前記第1,第2左側方センサ(51,52)及び前記第1,第2右側方センサ(61,62)は、前記第1送信特性で前記探査を送信し、
前記受信波がいずれの超音波センサから送信された探査波の反射波であるかを判定する判定部(23)を備える、物体検知システム。 - 請求項1〜5のいずれか1項に記載の超音波センサを複数備え、車両に搭載される物体検知システムであって、
前記送信部は、さらに、前記探査波の反射波を含む受信波を受信する送受信部として機能し、
前記受信波の位相、周波数、周期及び振幅の少なくともひとつを含む受信特性を取得する特性取得部(18)と、を備え、
前記車両の前端部には、左側から順に前記超音波センサである第1〜第4前方センサ(31〜34)が互いに間隔を開けて設けられており、
前記車両の後端部には、左側から順に前記超音波センサである第1〜第4後方センサ(41〜44)が互いに間隔を開けて設けられており、
前記車両の左側方には、前側から順に前記超音波センサである第1,第2左側方センサ(51,52)が間隔を開けて設けられており、
前記車両の右側方には、前側から順に前記超音波センサである第1,第2右側方センサ(61,62)が間隔を開けて設けられており、
前記第1前方センサ(31)、前記第4前方センサ(34)、前記第1後方センサ(41)、及び前記第4後方センサ(44)は、前記送信特性である第1送信特性で前記探査を送信し、前記第3前方センサ(33)、前記第2後方センサ(42)、前記第1左側方センサ(51)、及び前記第2右側方センサ(62)は、前記第1送信特性と異なる前記送信特性である第2送信特性で前記探査を送信し、前記第2前方センサ(32)、前記第3後方センサ(43)、前記第2左側方センサ(52)、及び前記第1右側方センサ(61)は、前記第1送信特性及び前記第2送信特性と異なる前記送信特性である第3送信特性で前記探査を送信し、
前記受信波がいずれの超音波センサから送信された探査波の反射波であるかを判定する判定部(23)を備える、物体検知システム。 - 請求項1〜5のいずれか1項に記載の超音波センサを複数備え、車両に搭載される物体検知システムであって、
前記送信部は、さらに、前記探査波の反射波を含む受信波を受信する送受信部として機能し、
前記受信波の位相、周波数、周期及び振幅の少なくともひとつを含む受信特性を取得する特性取得部(18)と、を備え、
前記車両の前端部には、左側から順に前記超音波センサである第1〜第4前方センサ(31〜34)が互いに間隔を開けて設けられており、
前記車両の後端部には、左側から順に前記超音波センサである第1〜第4後方センサ(41〜44)が互いに間隔を開けて設けられており、
前記車両の左側方には、前側から順に前記超音波センサである第1,第2左側方センサ(51,52)が間隔を開けて設けられており、
前記車両の右側方には、前側から順に前記超音波センサである第1,第2右側方センサ(61,62)が間隔を開けて設けられており、
前記物体検知装置は、前記送信特性を第1設定と第2設定とに所定期間ごとに切り替え、
前記第1設定では、前記第2前方センサ(32)、前記第3後方センサ(43)、前記第2左側方センサ(52)、及び前記第1右側方センサ(61)は、前記送信特性である第1送信特性で前記探査を送信し、前記第3前方センサ(33)、前記第2後方センサ(42)、前記第1左側方センサ(51)、及び前記第2右側方センサ(62)は、前記第1送信特性と異なる前記送信特性である第2送信特性で前記探査を送信し、
前記第2設定では、前記第4前方センサ(34)及び前記第1後方センサ(41)は、前記第1送信特性で前記探査を送信し、前記第1前方センサ(31)及び前記第4後方センサ(44)は、前記2送信特性で前記探査を送信し、
前記受信波がいずれの超音波センサから送信された探査波の反射波であるかを判定する判定部(23)を備える、物体検知システム。 - 請求項1〜5のいずれか1項に記載の超音波センサを複数備え、車両に搭載される物体検知システムであって、
前記送信部は、さらに、前記探査波の反射波を含む受信波を受信する送受信部として機能し、
前記受信波の位相、周波数、周期及び振幅の少なくともひとつを含む受信特性を取得する特性取得部(18)と、を備え、
前記車両の前端部には、左側から順に前記超音波センサである第1〜第4前方センサ(31〜34)が互いに間隔を開けて設けられており、
前記車両の後端部には、左側から順に前記超音波センサである第1〜第4後方センサ(41〜44)が互いに間隔を開けて設けられており、
前記車両の左側方には、前側から順に前記超音波センサである第1,第2左側方センサ(51,52)が間隔を開けて設けられており、
前記車両の右側方には、前側から順に前記超音波センサである第1,第2右側方センサ(61,62)が間隔を開けて設けられており、
前記物体検知装置は、前記送信特性を第1設定と第2設定とに所定期間ごとに切り替え、
前記第1設定では、前記第2前方センサ(32)、前記第3後方センサ(43)、前記第2左側方センサ(52)、及び前記第1右側方センサ(61)は、前記送信特性である第1送信特性で前記探査を送信し、前記第3前方センサ(33)、前記第2後方センサ(42)、前記第1左側方センサ(51)、及び前記第2右側方センサ(62)は、前記第1送信特性と異なる前記送信特性である第2送信特性で前記探査を送信し、
前記第2設定では、前記第4前方センサ(34)、前記第1後方センサ(41)、前記第2左側方センサ(52)、及び前記第2右側方センサ(62)は、前記第1送信特性で前記探査を送信し、前記第1前方センサ(31)、前記第4後方センサ(44)、前記第1左側方センサ(51)、及び前記第1右側方センサ(61)は、前記2送信特性で前記探査を送信し、
前記受信波がいずれの超音波センサから送信された探査波の反射波であるかを判定する判定部(23)を備える、物体検知システム。 - 請求項1〜5のいずれか1項に記載の超音波センサを複数備え、車両に搭載される物体検知システムであって、
前記送信部は、さらに、前記探査波の反射波を含む受信波を受信する送受信部として機能し、
前記受信波の位相、周波数、周期及び振幅の少なくともひとつを含む受信特性を取得する特性取得部(18)と、を備え、
前記車両の前端部には、左側から順に前記超音波センサである第1〜第4前方センサ(31〜34)が互いに間隔を開けて設けられており、
前記車両の後端部には、左側から順に前記超音波センサである第1〜第4後方センサ(41〜44)が互いに間隔を開けて設けられており、
前記車両の左側方には、前側から順に前記超音波センサである第1,第2左側方センサ(51,52)が間隔を開けて設けられており、
前記車両の右側方には、前側から順に前記超音波センサである第1,第2右側方センサ(61,62)が間隔を開けて設けられており、
前記物体検知装置は、前記送信特性を第1設定と第2設定とに所定期間ごとに切り替え、
前記第1設定では、前記第1前方センサ(31)、前記第4後方センサ(44)、前記第2左側方センサ(52)、及び前記第1右側方センサ(61)は、前記送信特性である第1送信特性で前記探査を送信し、前記第3前方センサ(33)及び前記第2後方センサ(42)は、前記第1送信特性と異なる前記送信特性である第2送信特性で前記探査を送信し、
前記第2設定では、前記第2前方センサ(32)、前記第1後方センサ(41)、及び前記第2右側方センサ(62)は、前記第1送信特性で前記探査を送信し、前記第4前方センサ(34)、第3後方センサ(43)、及び前記第1左側方センサ(51)は、前記2送信特性で前記探査を送信し、
前記受信波がいずれの超音波センサから送信された探査波の反射波であるかを判定する判定部(23)を備える、物体検知システム。 - 請求項1〜5のいずれか1項に記載の超音波センサを複数備え、車両に搭載される物体検知システムであって、
前記送信部は、さらに、前記探査波の反射波を含む受信波を受信する送受信部として機能し、
前記受信波の位相、周波数、周期及び振幅の少なくともひとつを含む受信特性を取得する特性取得部(18)と、を備え、
前記車両の前端部には、左側から順に前記超音波センサである第1〜第4前方センサ(31〜34)が互いに間隔を開けて設けられており、
前記車両の後端部には、左側から順に前記超音波センサである第1〜第4後方センサ(41〜44)が互いに間隔を開けて設けられており、
前記車両の左側方には、前側から順に前記超音波センサである第1,第2左側方センサ(51,52)が間隔を開けて設けられており、
前記車両の右側方には、前側から順に前記超音波センサである第1,第2右側方センサ(61,62)が間隔を開けて設けられており、
前記物体検知装置は、前記送信特性を第1設定と第2設定とに所定期間ごとに切り替え、
前記第1設定では、前記第1前方センサ(31)、前記第4後方センサ(44)、前記第2左側方センサ(52)、及び前記第1右側方センサ(61)は、前記送信特性である第1送信特性で前記探査を送信し、前記第3前方センサ(33)、前記第2後方センサ(42)、前記第1左側方センサ(51)、及び前記第2右側方センサ(62)は、前記第1送信特性と異なる前記送信特性である第2送信特性で前記探査を送信し、
前記第2設定では、前記第2前方センサ(32)、前記第1後方センサ(41)、前記第2左側方センサ(52)、前記第1右側方センサ(61)、及び前記第2右側方センサ(62)は、前記第1送信特性で前記探査を送信し、前記第4前方センサ(34)、第3後方センサ(43)、及び前記第1左側方センサ(51)は、前記2送信特性で前記探査を送信し、
前記受信波がいずれの超音波センサから送信された探査波の反射波であるかを判定する判定部(23)を備える、物体検知システム。 - 少なくともひとつの前記超音波センサは、自己が送信した探査波の反射波である直接波と、他の前記超音波センサが送信した探査波の反射波である間接波とを受信可能に配置されており、
自己が送信する探査波の前記送信特性と他の前記超音波センサが送信する探査波の前記送信特性とは異なっており、
前記判定部は、前記受信特性に基づいて、前記超音波センサが受信した受信波が前記直接波及び前記間接波のいずれであるかを判定する、請求項6〜12のいずれか1項に記載の物体検知システム。 - 少なくともひとつの前記超音波センサは、互いに前記送信特性が異なる他の複数の前記超音波センサが送信した探査波の反射波である間接波を受信可能に配置されており、
前記判定部は、前記受信特性に基づいて、前記超音波センサが受信した受信波がいずれの前記超音波センサの間接波であるかを判定する、請求項6〜13のいずれか1項に記載の物体検知システム。 - 請求項1〜5のいずれか1項に記載の超音波センサを複数備え、車両に搭載される物体検知システムであって、
前記送信部は、さらに、前記探査波の反射波を含む受信波を受信する送受信部として機能し、
前記受信波の位相、周波数、周期及び振幅の少なくともひとつを含む受信特性を取得する特性取得部(18)と、
前記受信波がいずれの超音波センサから送信された探査波の反射波であるかを判定する判定部(23)と、を備え、
前記超音波センサは、前記送信特性を所定期間ごとに切り替える、物体検知システム。 - 前記車両の右側方に設けられる前記超音波センサ(51,52)の前記送信特性と、前記車両の左側方に設けられる前記超音波センサ(61,62)の前記送信特性とが異なる、請求項15に記載の物体検知システム。
- 前記車両の前端部に設けられる前記超音波センサ(31〜34)の前記送信特性と、前記車両の後端部に設けられる前記超音波センサ(41〜44)の前記送信特性とが互いに異なる、請求項15に記載の物体検知システム。
- 前記車両において隣り合って設けられ、互いに前記送信特性が異なる前記超音波センサ(31〜34,51,61,41〜44,52,62)を含む、請求項15に記載の物体検知システム。
- 前記車両の前端部に少なくとも2つの前記超音波センサ(31〜34)が隣り合って設けられており、前記少なくとも2つの前記超音波センサにおいて隣り合う前記超音波センサの前記送信特性が互いに異なり、
前記車両の後端部に少なくとも2つの前記超音波センサ(41〜44)が隣り合って設けられており、前記少なくとも2つの前記超音波センサにおいて隣り合う前記超音波センサの前記送信特性が互いに異なる、請求項18に記載の物体検知システム。 - 前記車両の左側方に少なくとも2つの前記超音波センサ(51,52)が隣り合って設けられており、前記少なくとも2つの前記超音波センサにおいて隣り合う前記超音波センサの前記送信特性が互いに異なり、
前記車両の右側方に少なくとも2つの前記超音波センサ(61,62)が隣り合って設けられており、前記少なくとも2つの前記超音波センサにおいて隣り合う前記超音波センサの前記送信特性が互いに異なる、請求項18又は19に記載の物体検知システム。 - 前記車両の外周縁部に少なくとも8つの前記超音波センサ(31〜34,41〜44、51,52,61,62)が隣り合って設けられており、前記少なくとも8つの前記超音波センサにおいて隣り合う前記超音波センサの前記送信特性が互いに異なる、請求項18〜20のいずれか1項に記載の物体検知システム。
- 前記車両において間隔を開けて複数設けられ、互いに前記送信特性が異なる前記超音波センサ(31〜34,51,61,41〜44,52,62)を含む、請求項15に記載の物体検知システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105944A JP6714543B2 (ja) | 2017-05-29 | 2017-05-29 | 超音波センサ及び物体検知システム |
| DE112018002740.6T DE112018002740T5 (de) | 2017-05-29 | 2018-05-24 | Ultraschallsensor und objekterkennungssystem |
| PCT/JP2018/020078 WO2018221393A1 (ja) | 2017-05-29 | 2018-05-24 | 超音波センサ及び物体検知システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105944A JP6714543B2 (ja) | 2017-05-29 | 2017-05-29 | 超音波センサ及び物体検知システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018200277A JP2018200277A (ja) | 2018-12-20 |
| JP2018200277A5 JP2018200277A5 (ja) | 2019-06-27 |
| JP6714543B2 true JP6714543B2 (ja) | 2020-06-24 |
Family
ID=64454617
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017105944A Active JP6714543B2 (ja) | 2017-05-29 | 2017-05-29 | 超音波センサ及び物体検知システム |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6714543B2 (ja) |
| DE (1) | DE112018002740T5 (ja) |
| WO (1) | WO2018221393A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6945773B2 (ja) * | 2019-07-22 | 2021-10-06 | 三菱電機株式会社 | 障害物検出装置 |
| JP7282115B2 (ja) * | 2021-02-17 | 2023-05-26 | 本田技研工業株式会社 | 運転支援装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4283170B2 (ja) * | 2003-12-17 | 2009-06-24 | 株式会社デンソー | 物体検出装置 |
| DE102007029959A1 (de) * | 2007-06-28 | 2009-01-02 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Erfassung einer Umgebung |
| JP4783481B1 (ja) * | 2010-02-18 | 2011-09-28 | パナソニック株式会社 | 超音波測定方法および超音波測定装置 |
| JP5533738B2 (ja) * | 2011-03-02 | 2014-06-25 | 株式会社デンソー | 超音波検知装置 |
| JP2015191441A (ja) * | 2014-03-28 | 2015-11-02 | 三菱電機株式会社 | 衝突判定装置 |
| JP6416726B2 (ja) * | 2015-10-20 | 2018-10-31 | 株式会社Soken | 超音波式物体検知装置 |
-
2017
- 2017-05-29 JP JP2017105944A patent/JP6714543B2/ja active Active
-
2018
- 2018-05-24 DE DE112018002740.6T patent/DE112018002740T5/de active Pending
- 2018-05-24 WO PCT/JP2018/020078 patent/WO2018221393A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| DE112018002740T5 (de) | 2020-02-20 |
| JP2018200277A (ja) | 2018-12-20 |
| WO2018221393A1 (ja) | 2018-12-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10310083B2 (en) | Method for detecting target echoes in a received signal of an ultrasonic sensor of a motor vehicle, ultrasonic sensor device, and motor vehicle | |
| JP5626132B2 (ja) | 物体検出装置 | |
| CN103534603B (zh) | 具有降低的最小作用距离的超声波测量系统以及用于探测障碍物的方法 | |
| US20170174093A1 (en) | Device and method for operating an inductive charging system | |
| US9678207B2 (en) | Object detection device and object detection method | |
| JP6714543B2 (ja) | 超音波センサ及び物体検知システム | |
| JP2006284369A (ja) | パルスレーダー装置 | |
| CN108700658B (zh) | 特别是用于距离测量的和/或作为车辆泊车辅助机构的超声测量系统 | |
| US20150078133A1 (en) | Method and device for determining the position and/or the movement of an object | |
| KR102546876B1 (ko) | 자동차용 초음파 센서 장치를 주파수 변조 여진 신호의 진폭의 시간적 프로파일을 적응시키면서 작동시키는 방법 | |
| JP6714542B2 (ja) | 物体検知システム | |
| JP2020505603A (ja) | 超音波センサ装置 | |
| US20200072973A1 (en) | Method for operating an ultrasonic sensor | |
| JP2018169366A (ja) | 物体検知装置、物体検知システム及び移動体 | |
| JP4936162B2 (ja) | 移動物体検出装置 | |
| EP3012661B1 (en) | Mobile-body detection device | |
| CN110073241B (zh) | 用于运行超声传感器的方法 | |
| CN108700659A (zh) | 用于过滤机动车辆的超声波传感器的电源电压的滤波器装置、超声波传感器装置以及机动车辆 | |
| CN104508510A (zh) | 用于运行超声换能器的方法 | |
| CN203958061U (zh) | 一种车载倒车防撞报警装置 | |
| US11899106B1 (en) | Dual-channel acoustic distance measurement circuit and method | |
| EP3012660B1 (en) | Mobile-body detection device | |
| CN110235023B (zh) | 超声传感器设备 | |
| WO2015115581A1 (ja) | タイヤバルブid登録システム | |
| JP7050289B2 (ja) | 接近検知システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190522 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190522 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200512 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200605 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6714543 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |