JP6706032B2 - 移動体システム及び制御装置 - Google Patents
移動体システム及び制御装置 Download PDFInfo
- Publication number
- JP6706032B2 JP6706032B2 JP2015119308A JP2015119308A JP6706032B2 JP 6706032 B2 JP6706032 B2 JP 6706032B2 JP 2015119308 A JP2015119308 A JP 2015119308A JP 2015119308 A JP2015119308 A JP 2015119308A JP 6706032 B2 JP6706032 B2 JP 6706032B2
- Authority
- JP
- Japan
- Prior art keywords
- event
- moving body
- unit
- display unit
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/183—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a single remote source
- H04N7/185—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a single remote source from a mobile camera, e.g. for remote control
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/76—Television signal recording
- H04N5/91—Television signal processing therefor
- H04N5/93—Regeneration of the television signal or of selected parts thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/79—Processing of colour television signals in connection with recording
- H04N9/80—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback
- H04N9/82—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback the individual colour picture signal components being recorded simultaneously only
- H04N9/8205—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback the individual colour picture signal components being recorded simultaneously only involving the multiplexing of an additional signal and the colour video signal
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
Description
(実施形態1)
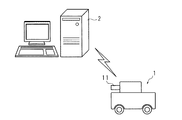
図1は、実施形態1に係る移動体システムを示す模式図である。移動体システムは、移動体1と、移動体1の動作を制御する制御装置2とを含んで構成されている。移動体システムは、所定の施設又は敷地等の予め定められた区域内を移動体1を用いて監視するためのシステムである。移動体1は、車輪及びモータ等の移動機構を備え、地上を自律走行する車両である。移動体1は、カメラ11を備えている。カメラ11は本発明における撮影部に相当する。制御装置2は、コンピュータで構成されており、移動体1の動作を制御する。移動体1は、制御装置2との間で通信を行うことができるようになっている。通信は無線及び/又は有線の図示しない通信ネットワークを介して行われる。移動体1は、カメラ11で撮影した画像を表す画像データを制御装置2へ送信する。制御装置2へ受信された画像データに基づいて、監視が行われる。
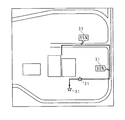
実施形態2に係る移動体1及び制御装置2の内部の機能構成は、実施形態1と同様である。図11は、実施形態2に係る表示部26での表示例を示す模式図である。表示部26の表示画面は、複数の画面に分割されている。CPU21は、表示部26の表示画面を分割し、表示部26に、分割した表示画面の一部に地図を表示させ、他の部分に移動体1のカメラ11で撮影した撮影画像を表示させる。具体的には、CPU21は、通信部25が受信した画像データが表す撮影画像と地図とを組み合わせて一つの画像を生成し、生成した画像を表示部26に表示させる処理を行う。図11中には、表示部26の表示画面を第1画面41、第2画面42及び第3画面43に分割し、第1画面41に地図を表示し、第2画面42及び第3画面43の夫々に撮影画像を表示した例を示す。例えば、移動体システム1は、二つの移動体1を備えており、一方の移動体1で撮影した撮影画像が第2画面42に表示され、他方の移動体1で撮影した撮影画像が第3画面43に表示される。
図12は、実施形態3に係る移動体システムを示す模式図である。実施形態3においては、移動体システムは複数の制御装置2を備えている。夫々の制御装置2は、一又は複数の移動体1の動作を制御する。夫々の制御装置2は、制御する移動体1の移動範囲が互いに異なっている。夫々の制御装置2に制御される移動体1を用いて、互いに異なった地域の監視が行われる。また、夫々の制御装置2は、通信ネットワーク6に接続されており、通信ネットワーク6には記憶装置5が接続されている。実施形態3に係る移動体1及び制御装置2の内部の機能構成は、実施形態1と同様である。但し、制御装置2の通信部25は、移動体1との通信を行うと共に、通信ネットワーク6に接続され、通信ネットワーク6を介して記憶装置5と通信を行う。図12には、移動体システムが二つの制御装置2を備えた例を示しているが、移動体システムは三つ以上の制御装置2を備えていてもよい。
11 カメラ
12 制御部
13 通信部
16 電池
2 制御装置
21 CPU
23 記憶部
231 コンピュータプログラム
232 イベント情報
25 通信部
26 表示部
31 マーカー
5 記憶装置
51 CPU
53 記憶部
Claims (13)
- 撮影を行う移動体と、前記移動体の外部に配置された制御装置とを含み、前記移動体の外部において使用者が前記移動体を用いて予め定められた区域内を監視するための移動体システムにおいて、
前記移動体は、
撮影画像を表す画像データ及び自己の状態を示す状態情報を前記制御装置へ送信する送信部を備え、
前記制御装置は、
前記画像データ及び前記状態情報を受信する受信部と、
前記移動体の移動範囲を含む地図を前記使用者が監視可能なように表示する表示部と、
受信した前記画像データ又は前記状態情報に基づいて、前記移動体に前記区域内において侵入者を発見するイベントが発生したことを検出するイベント検出部と、
前記状態情報に基づいて、前記イベントが発生したときの前記移動体の位置を検出する位置検出部と、
前記表示部に、前記位置検出部が検出した位置を前記地図上で示したマーカーを表示させるマーカー表示部とを備え、
前記表示部は、前記移動体が走行した経路を前記地図に重ねて表示し、
前記マーカー表示部は、前記イベントが発生する都度、前記マーカーを前記地図及び前記経路に重ねて表示する
ことを特徴とする移動体システム。 - 前記マーカー表示部は、前記イベントの内容に応じて異なるマーカーを前記表示部に表示させるように構成してあること
を特徴とする請求項1に記載の移動体システム。 - 前記制御装置は、
前記イベントの内容及び前記位置を含んだイベント情報を記憶する記憶部を更に備えること
を特徴とする請求項1又は2に記載の移動体システム。 - 前記イベント情報は、前記イベント検出部が前記イベントが発生したことを検出した時刻を含んでいること
を特徴とする請求項3に記載の移動体システム。 - 前記制御装置は複数であり、
複数の前記制御装置は、前記移動体の移動範囲が異なっており、
複数の前記制御装置に関する前記イベント情報を記憶する記憶装置を更に含んでおり、
前記記憶装置は、
複数の前記制御装置に関する前記イベント情報の全体に対して、又は夫々の前記制御装置に関する前記イベント情報に対して、統計処理を行う統計処理部を備え、
前記制御装置は、
前記記憶装置から、前記統計処理部での統計処理による統計結果を取得する取得部と、
取得した前記統計結果を前記表示部に表示させる統計結果表示部を更に備えること
を特徴とする請求項3又は4に記載の移動体システム。 - 前記制御装置は、
前記表示部に、前記画像データが表す撮影画像を前記地図と同時に表示させる表示制御部を更に備えること
を特徴とする請求項1から5までのいずれか一つに記載の移動体システム。 - 前記表示制御部は、前記表示部の表示画面を分割し、前記表示部に、分割した表示画面の一部に前記地図を表示させ、他の部分に前記撮影画像を表示させるように構成してあること
を特徴とする請求項6に記載の移動体システム。 - 前記表示制御部は、前記イベント検出部が前記イベントの発生を検出したときに前記表示部に前記撮影画像を前記地図と同時に表示させるように構成してあること
を特徴とする請求項6又は7に記載の移動体システム。 - 前記イベント検出部は、前記状態情報に基づいて、前記移動体の状態の変化をイベントとして検出するように構成してあること
を特徴とする請求項1から8までのいずれか一つに記載の移動体システム。 - 前記イベント検出部は、前記移動体が予め定められている経路の一部を通らないことをイベントとして検出するように構成してあり、
前記制御装置は、
前記移動体が前記経路の特定の部分を通らないイベントの発生数が所定数以上である場合に、前記特定の部分を迂回する経路を生成する経路生成部を更に備えること
を特徴とする請求項1から9までのいずれか一つに記載の移動体システム。 - 前記制御装置は、
前記イベント検出部が前記イベントの発生を検出した場合に、前記表示部に、イベントが発生したことを示す画像を表示させるイベント表示部を更に備えること
を特徴とする請求項1から10までのいずれか一つに記載の移動体システム。 - 撮影を行う移動体の外部に配置されており、前記移動体を制御する制御装置において、
撮影画像を表す画像データ及び前記移動体の状態を示す状態情報を前記移動体から受信する受信部と、
前記移動体の移動範囲を含む地図を前記移動体の外部において使用者が監視可能なように表示する表示部と、
受信した前記画像データ又は前記状態情報に基づいて、前記移動体に予め定められた区域内において侵入者を発見するイベントが発生したことを検出するイベント検出部と、
前記状態情報に基づいて、前記イベントが発生したときの前記移動体の位置を検出する位置検出部と、
前記表示部に、前記位置検出部が検出した位置を前記地図上で示したマーカーを表示させるマーカー表示部とを備え、
前記表示部は、前記移動体が走行した経路を前記地図に重ねて表示し、
前記マーカー表示部は、前記イベントが発生する都度、前記マーカーを前記地図及び前記経路に重ねて表示する
ことを特徴とする制御装置。 - 前記イベント検出部が前記イベントの発生を検出した場合に、前記表示部に、イベントが発生したことを示す画像を表示させるイベント表示部を更に備えること
を特徴とする請求項12に記載の制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015119308A JP6706032B2 (ja) | 2015-06-12 | 2015-06-12 | 移動体システム及び制御装置 |
| US15/055,675 US10237518B2 (en) | 2015-06-12 | 2016-02-29 | Mobile body system, control apparatus and method for controlling a mobile body |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015119308A JP6706032B2 (ja) | 2015-06-12 | 2015-06-12 | 移動体システム及び制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017003866A JP2017003866A (ja) | 2017-01-05 |
| JP6706032B2 true JP6706032B2 (ja) | 2020-06-03 |
Family
ID=57516362
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015119308A Active JP6706032B2 (ja) | 2015-06-12 | 2015-06-12 | 移動体システム及び制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10237518B2 (ja) |
| JP (1) | JP6706032B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6614335B2 (ja) * | 2016-03-24 | 2019-12-04 | 日本電気株式会社 | 画像表示システム、端末、方法およびプログラム |
| US10216188B2 (en) | 2016-07-25 | 2019-02-26 | Amazon Technologies, Inc. | Autonomous ground vehicles based at delivery locations |
| US10248120B1 (en) | 2016-09-16 | 2019-04-02 | Amazon Technologies, Inc. | Navigable path networks for autonomous vehicles |
| US10514690B1 (en) | 2016-11-15 | 2019-12-24 | Amazon Technologies, Inc. | Cooperative autonomous aerial and ground vehicles for item delivery |
| US11263579B1 (en) | 2016-12-05 | 2022-03-01 | Amazon Technologies, Inc. | Autonomous vehicle networks |
| US10308430B1 (en) | 2016-12-23 | 2019-06-04 | Amazon Technologies, Inc. | Distribution and retrieval of inventory and materials using autonomous vehicles |
| JP7346397B2 (ja) | 2018-10-17 | 2023-09-19 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 侵入地点特定装置、および、侵入地点特定方法 |
| KR102154610B1 (ko) * | 2020-04-10 | 2020-09-10 | 주식회사 넥스트케이 | 이벤트 발생 위치 계산이 가능한 영상장치 및 그 장치의 구동방법 |
| KR102189486B1 (ko) * | 2020-06-17 | 2020-12-11 | (주)인티그리트 | 공유자율주행장치의 원격 제어를 이용한 공유 콘텐츠 서비스 제공 시스템 |
| KR102372563B1 (ko) * | 2020-07-29 | 2022-03-10 | 네이버랩스 주식회사 | 로봇 원격 제어 방법 및 시스템 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11281393A (ja) * | 1998-03-30 | 1999-10-15 | Maspro Denkoh Corp | 車両の走行状態監視装置 |
| JP2002244731A (ja) * | 2001-02-21 | 2002-08-30 | Matsushita Electric Ind Co Ltd | 移動作業ロボット |
| US7131068B2 (en) * | 2001-05-25 | 2006-10-31 | Learning Tree International | System and method for electronic presentations having simultaneous display windows in a control screen |
| JP2003156350A (ja) * | 2001-11-21 | 2003-05-30 | Denso Corp | 車両用走行案内装置 |
| JP3988683B2 (ja) * | 2003-06-12 | 2007-10-10 | 株式会社日立製作所 | 画像情報取得システム及び車載端末 |
| US20060018516A1 (en) * | 2004-07-22 | 2006-01-26 | Masoud Osama T | Monitoring activity using video information |
| JP2006124986A (ja) | 2004-10-27 | 2006-05-18 | Hitachi Constr Mach Co Ltd | 路面への散布材の散布管理システム |
| US20060271286A1 (en) * | 2005-05-27 | 2006-11-30 | Outland Research, Llc | Image-enhanced vehicle navigation systems and methods |
| US9373149B2 (en) * | 2006-03-17 | 2016-06-21 | Fatdoor, Inc. | Autonomous neighborhood vehicle commerce network and community |
| US8115812B2 (en) * | 2006-09-20 | 2012-02-14 | Panasonic Corporation | Monitoring system, camera, and video encoding method |
| US20140143061A1 (en) * | 2006-11-22 | 2014-05-22 | Raj Abhyanker | Garage sales in a geo-spatial social network |
| JP2011128005A (ja) * | 2009-12-17 | 2011-06-30 | Fujitsu Ten Ltd | ナビゲーション装置、車載表示システム及び地図表示方法 |
| US20120257061A1 (en) * | 2011-04-05 | 2012-10-11 | Honeywell International Inc. | Neighborhood Camera Linking System |
| US9493130B2 (en) * | 2011-04-22 | 2016-11-15 | Angel A. Penilla | Methods and systems for communicating content to connected vehicle users based detected tone/mood in voice input |
| US9285944B1 (en) * | 2011-04-22 | 2016-03-15 | Angel A. Penilla | Methods and systems for defining custom vehicle user interface configurations and cloud services for managing applications for the user interface and learned setting functions |
| US9123035B2 (en) * | 2011-04-22 | 2015-09-01 | Angel A. Penilla | Electric vehicle (EV) range extending charge systems, distributed networks of charge kiosks, and charge locating mobile apps |
| US9116011B2 (en) * | 2011-10-21 | 2015-08-25 | Here Global B.V. | Three dimensional routing |
| US9488489B2 (en) * | 2012-09-28 | 2016-11-08 | Google Inc. | Personalized mapping with photo tours |
| JP2014154005A (ja) * | 2013-02-12 | 2014-08-25 | Fujifilm Corp | 危険情報提供方法、装置、及びプログラム |
| US20150202770A1 (en) * | 2014-01-17 | 2015-07-23 | Anthony Patron | Sidewalk messaging of an autonomous robot |
| US10442355B2 (en) * | 2014-09-17 | 2019-10-15 | Intel Corporation | Object visualization in bowl-shaped imaging systems |
| US9718441B2 (en) * | 2015-04-29 | 2017-08-01 | International Business Machines Corporation | Vehicle and local area security system communications |
| US11119477B1 (en) * | 2016-01-22 | 2021-09-14 | State Farm Mutual Automobile Insurance Company | Anomalous condition detection and response for autonomous vehicles |
| DE102016218012A1 (de) * | 2016-09-20 | 2018-03-22 | Volkswagen Aktiengesellschaft | Verfahren für eine Datenverarbeitungsanlage zur Erhaltung eines Betriebszustands eines ersten autonomen Fahrzeugs sowie Verfahren für eine Datenverarbeitungsanlage zum Verwalten einer Mehrzahl autonomer Fahrzeuge |
| US10275815B2 (en) * | 2017-02-14 | 2019-04-30 | Thomas Danaher Harvey | Methods for sample presentation using autonomous vehicles |
| US10328934B2 (en) * | 2017-03-20 | 2019-06-25 | GM Global Technology Operations LLC | Temporal data associations for operating autonomous vehicles |
| US10753763B2 (en) * | 2017-04-10 | 2020-08-25 | Chian Chiu Li | Autonomous driving under user instructions |
-
2015
- 2015-06-12 JP JP2015119308A patent/JP6706032B2/ja active Active
-
2016
- 2016-02-29 US US15/055,675 patent/US10237518B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017003866A (ja) | 2017-01-05 |
| US10237518B2 (en) | 2019-03-19 |
| US20160366372A1 (en) | 2016-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6706032B2 (ja) | 移動体システム及び制御装置 | |
| WO2017186157A1 (zh) | 路况信息的推送方法、行车记录仪、云端服务器以及推送系统 | |
| US10497224B2 (en) | Safety management system for worker at tunnel construction site | |
| US20220107643A1 (en) | Control device, imaging device, control method, imaging method, and computer program | |
| EP3098562B1 (en) | Information processing device, information processing method, and computer program | |
| JP7070683B2 (ja) | 劣化診断装置、劣化診断システム、劣化診断方法、プログラム | |
| KR101202841B1 (ko) | 도로 침수 감시 시스템 및 방법 | |
| CN107438766B (zh) | 基于图像的监视系统 | |
| JP6195457B2 (ja) | 撮影システム | |
| JP2012230532A (ja) | 車両検出システム、車載機およびセンター | |
| EP3862991A1 (en) | Information processing method and information processing system | |
| WO2021177183A1 (ja) | 監視装置、監視システム、監視方法およびプログラム記録媒体 | |
| KR101844533B1 (ko) | 건축 현장의 진행 상황을 모니터링하기 위한 실시간 건축 현장 모니터링 시스템 및 이를 이용한 건축 현장의 진행 상황을 모니터링하기 위한 실시간 건축 현장 모니터링 방법 | |
| CN110782095A (zh) | 一种消防路线规划方法、装置、电子设备及存储介质 | |
| JP2007089105A (ja) | 歩行監視システム | |
| JP7428839B2 (ja) | 情報処理方法 | |
| JP6972868B2 (ja) | 安全度判定プログラム、安全度判定方法および安全度判定装置 | |
| JP2013174983A (ja) | 貯水池動態監視システム | |
| JP5018534B2 (ja) | 車両セキュリティシステム | |
| CN106920364A (zh) | 行路预警方法、装置及终端 | |
| JP2015215766A (ja) | 避難経路提供システム、避難経路提供方法、及び避難経路提供プログラム | |
| KR101512809B1 (ko) | 차량용 블랙박스 장치 및 그 제어방법 | |
| JP6729211B2 (ja) | クレーンの情報提示システム | |
| KR102348061B1 (ko) | 전동 휠체어의 사고 예방을 위한 IoT 기반의 모니터링 시스템 및 그 방법 | |
| JP5085472B2 (ja) | 車両情報管理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180323 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200512 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200515 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6706032 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |