JP6677696B2 - 位相シフトのホログラムを用いたレンズフリーイメージセンサ - Google Patents
位相シフトのホログラムを用いたレンズフリーイメージセンサ Download PDFInfo
- Publication number
- JP6677696B2 JP6677696B2 JP2017214953A JP2017214953A JP6677696B2 JP 6677696 B2 JP6677696 B2 JP 6677696B2 JP 2017214953 A JP2017214953 A JP 2017214953A JP 2017214953 A JP2017214953 A JP 2017214953A JP 6677696 B2 JP6677696 B2 JP 6677696B2
- Authority
- JP
- Japan
- Prior art keywords
- phase
- green
- phase shift
- hologram image
- pixel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000010363 phase shift Effects 0.000 title claims description 78
- 239000000463 material Substances 0.000 claims description 16
- 238000003384 imaging method Methods 0.000 claims description 9
- 230000009466 transformation Effects 0.000 claims 5
- 239000000284 extract Substances 0.000 claims 3
- 238000001093 holography Methods 0.000 description 22
- 238000000034 method Methods 0.000 description 13
- 238000006243 chemical reaction Methods 0.000 description 6
- 239000000758 substrate Substances 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 238000013461 design Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000005693 optoelectronics Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000011161 development Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images


















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/0005—Adaptation of holography to specific applications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/04—Processes or apparatus for producing holograms
- G03H1/0443—Digital holography, i.e. recording holograms with digital recording means
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/26—Processes or apparatus specially adapted to produce multiple sub- holograms or to obtain images from them, e.g. multicolour technique
- G03H1/2645—Multiplexing processes, e.g. aperture, shift, or wavefront multiplexing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/01—Circuitry for demodulating colour component signals modulated spatially by colour striped filters by phase separation
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/04—Processes or apparatus for producing holograms
- G03H1/0443—Digital holography, i.e. recording holograms with digital recording means
- G03H2001/045—Fourier or lensless Fourier arrangement
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/04—Processes or apparatus for producing holograms
- G03H1/0443—Digital holography, i.e. recording holograms with digital recording means
- G03H2001/0454—Arrangement for recovering hologram complex amplitude
- G03H2001/0458—Temporal or spatial phase shifting, e.g. parallel phase shifting method
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H2226/00—Electro-optic or electronic components relating to digital holography
- G03H2226/11—Electro-optic recording means, e.g. CCD, pyroelectric sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
Landscapes
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computing Systems (AREA)
- Theoretical Computer Science (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Solid State Image Pick-Up Elements (AREA)
- Holo Graphy (AREA)
- Optical Filters (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
- Color Television Image Signal Generators (AREA)
- Studio Devices (AREA)
Description

図7Cは、図7Aの実施形態に係るイメージセンサの斜視図である。
101、103 ビームスプリッタ
102 ピエゾ鏡
104 ミラー
110 レーザー光源
111 ビームエミッタ
120 センサアレイ
200 イメージセンサ
220 センサアレイ
221 光電素子
230 基板
250 ユニットセル
251、252、253、254 光電素子
410、420、430、440 ユニットセル
411〜414 光電素子
421〜424 光電素子
431〜434 光電素子
441〜444 光電素子
450 マクロセルユニット
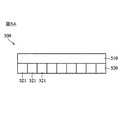
500 カラーイメージセンサ
510 フィルターアレイ
511 赤色フィルター
512 緑色フィルター
513 青色フィルター
520 センサアレイ
521 光電素子
530、540、550、560 ユニットセル
531〜534 光電素子
541〜544 光電素子
551〜554 光電素子
561〜564 光電素子
570 マクロユニットセル
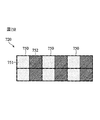
700 イメージセンサ
720 センサアレイ
721 光電素子
730 基板
750 ユニットセル
751 光電素子
752 光電素子
800 カラーイメージセンサ
810 フィルターアレイ
820 センサアレイ
821 ユニットセル
830、840、850、860 ユニットセル
831〜832 光電素子
841〜842 光電素子
851〜853 光電素子
861〜862 光電素子
870 マクロユニットセル
Claims (11)
- 入射光を受光する複数の光電素子を含み、
前記光電素子は、複数のユニットセル内に配置され、各前記ユニットセルは、第1の光電素子および第2の光電素子を含み、
各前記ユニットセルの前記第1の光電素子は、第1の位相の第1の画素を撮像し、各前記ユニットセルの前記第2の光電素子は、第2の位相の第2の画素を撮像し、
前記第1の位相は、前記第2の位相と異なり、
各前記ユニットセルは、第3の位相の第3の画素を撮像する第3の光電素子および第4の位相の第4の画素を撮像する第4の光電素子を更に含み、
前記第1の位相、前記第2の位相、前記第3の位相、および前記第4の位相は異なり、
各前記ユニットセルの前記第1の光電素子、前記第2の光電素子、前記第3の光電素子、および前記第4の光電素子は、特定の材料でできており、且つ異なる高さであり、
前記第1の位相、前記第2の位相、前記第3の位相、および前記第4の位相は、それぞれ0、π/2、π、および3π/2であるイメージセンサ。 - 第1の位相シフトのホログラム画像および第2の位相シフトのホログラム画像は、前記ユニットセルによって撮像された前記第1の位相の前記第1の画素と前記第2の位相の前記第2の画素をそれぞれ組み合わせることによって得られ、
物体波は、前記第1の位相シフトのホログラム画像および前記第2の位相シフトのホログラム画像に基づいて計算され、物体像は、逆変換を前記物体波に行うことにより再構成される請求項1に記載のイメージセンサ。 - 第1の位相シフトのホログラム画像、第2の位相シフトのホログラム画像、第3の位相シフトのホログラム画像、および第4の位相シフトのホログラム画像は、前記ユニットセルによって撮像された前記第1の位相の前記第1の画素、前記第2の位相の前記第2の画素、前記第3の位相の前記第3の画素、および前記第4の位相の前記第4の画素をそれぞれ組み合わせることによって得られ、
物体波は、前記第1の位相シフトのホログラム画像、前記第2の位相シフトのホログラム画像、前記第3の位相シフトのホログラム画像、および前記第4の位相シフトのホログラム画像に基づいて計算され、物体像は、逆変換を前記物体波に行うことにより再構成される請求項1に記載のイメージセンサ。 - 前記ユニットセルは、複数のマクロユニットセル内に配置され、各前記マクロユニットセルは、2×2のアレイに配置された4つのユニットセルを含み、各前記マクロユニットセルの前記4つのユニットセルの中の少なくとも1つは、それぞれの所定の角度によって回転されることができる請求項1に記載のイメージセンサ。
- 入射光から緑色光を抽出する第1の緑色フィルターおよび第2の緑色フィルター、
前記入射光から赤色光を抽出する赤色フィルター、および
前記入射光から青色光を抽出する青色フィルターを含むフィルターアレイを更に含む請求項1に記載のイメージセンサ。 - 前記ユニットセルは、複数のマクロユニットセル内に配置され、各前記マクロユニットセルは、2×2のアレイに配置された第1のユニットセル、第2のユニットセル、第3のユニットセル、および第4のユニットセルを含み、
各前記マクロユニットセルの前記第1のユニットセル、前記第2のユニットセル、前記第3のユニットセル、および前記第4のユニットセルは、前記第1の緑色フィルター、前記第2の緑色フィルター、前記赤色フィルター、および前記青色フィルターによって、前記緑色光、前記緑色光、前記赤色光、および前記青色光をそれぞれ受光し、
前記第1の緑色フィルター、前記第2の緑色フィルター、前記赤色フィルター、および前記青色フィルターは、ベイヤーパターンに配置され、
各前記マクロユニットセルの前記第1のユニットセル、前記第2のユニットセル、前記第3のユニットセル、および前記第4のユニットセルの前記第1の光電素子と前記第2の光電素子の高さは、前記緑色光、前記緑色光、前記赤色光、および前記青色光の波長にそれぞれ比例する請求項5に記載のイメージセンサ。 - 前記ユニットセルは、複数のマクロユニットセル内に配置され、各前記マクロユニットセルは、2×2のアレイに配置された第1のユニットセル、第2のユニットセル、第3のユニットセル、および第4のユニットセルを含み、
各前記マクロユニットセルの前記第1のユニットセル、前記第2のユニットセル、前記第3のユニットセル、および前記第4のユニットセルは、前記第1の緑色フィルター、前記第2の緑色フィルター、前記赤色フィルター、および前記青色フィルターによって、前記緑色光、前記緑色光、前記赤色光、および前記青色光をそれぞれ受光し、
各前記ユニットセルは、第3の位相の第3の画素を撮像する第3の光電素子および第4の位相の第4の画素を撮像する第4の光電素子を更に含み、
前記第1の位相、前記第2の位相、前記第3の位相、および前記第4の位相は異なる請求項5に記載のイメージセンサ。 - 第1の緑色位相シフトのホログラム画像、第2の緑色位相シフトのホログラム画像、第3の緑色位相シフトのホログラム画像、および第4の緑色位相シフトのホログラム画像は、前記第1のユニットセルによって撮像された前記第1の位相の前記第1の画素、前記第2の位相の前記第2の画素、前記第3の位相の前記第3の画素、および前記第4の位相の前記第4の画素をそれぞれ組み合わせることによって得られ、
第5の緑色位相シフトのホログラム画像、第6の緑色位相シフトのホログラム画像、第7の緑色位相シフトのホログラム画像、および第8の緑色位相シフトのホログラム画像は、前記第2のユニットセルによって撮像された前記第1の位相の前記第1の画素、前記第2の位相の前記第2の画素、前記第3の位相の前記第3の画素、および前記第4の位相の前記第4の画素をそれぞれ組み合わせることによって得られ、
第1の赤色位相シフトのホログラム画像、第2の赤色位相シフトのホログラム画像、第3の赤色位相シフトのホログラム画像、および第4の赤色位相シフトのホログラム画像は、前記第3のユニットセルによって撮像された前記第1の位相の前記第1の画素、前記第2の位相の前記第2の画素、前記第3の位相の前記第3の画素、および前記第4の位相の前記第4の画素をそれぞれ組み合わせることによって得られ、
第1の青色位相シフトのホログラム画像、第2の青色位相シフトのホログラム画像、第3の青色位相シフトのホログラム画像、および第4の青色位相シフトのホログラム画像は、前記第4のユニットセルによって撮像された前記第1の位相の前記第1の画素、前記第2の位相の前記第2の画素、前記第3の位相の前記第3の画素、および前記第4の位相の前記第4の画素をそれぞれ組み合わせることによって得られる請求項7に記載のイメージセンサ。 - 第1の緑色の物体波は、前記第1の緑色の位相シフトのホログラム画像、前記第2の緑色の位相シフトのホログラム画像、前記第3の緑色の位相シフトのホログラム画像、および前記第4の緑色の位相シフトのホログラム画像に基づいて計算され、第1の緑色の物体像は、逆変換を前記第1の緑色の物体波に行うことにより再構成され、
第2の緑色の物体波は、前記第6の緑色の位相シフトのホログラム画像、前記第6の緑色の位相シフトのホログラム画像、前記第7の緑色の位相シフトのホログラム画像、および前記第8の緑色の位相シフトのホログラム画像に基づいて計算され、第2の緑色の物体像は、前記逆変換を前記第2の緑色の物体波に行うことにより再構成され、
赤色の物体波は、前記第1の赤色の位相シフトのホログラム画像、前記第2の赤色の位相シフトのホログラム画像、前記第3の赤色の位相シフトのホログラム画像、および前記第4の赤色の位相シフトのホログラム画像に基づいて計算され、赤色の物体像は、前記逆変換を前記赤色の物体波に行うことにより再構成され、
青色の物体波は、前記第1の青色の位相シフトのホログラム画像、前記第2の青色の位相シフトのホログラム画像、前記第3の青色の位相シフトのホログラム画像、および前記第4の青色の位相シフトのホログラム画像に基づいて計算され、青色の物体像は、前記逆変換を前記青色の物体波に行うことにより再構成される請求項8に記載のイメージセンサ。 - 各前記マクロユニットセルの前記第1のユニットセル、前記第2のユニットセル、前記第3のユニットセル、および前記第4のユニットセルの前記第1の光電素子、前記第2の光電素子、前記第3の光電素子、および前記第4の光電素子の高さは、前記緑色光、前記緑色光、前記赤色光、および前記青色光の波長にそれぞれ比例する請求項7に記載のイメージセンサ。
- 入射光を受光する複数の光電素子を含み、
前記光電素子は、複数のユニットセル内に配置され、各前記ユニットセルは、第1の光電素子および第2の光電素子を含み、
各前記ユニットセルの前記第1の光電素子は、第1の位相の第1の画素を撮像し、各前記ユニットセルの前記第2の光電素子は、第2の位相の第2の画素を撮像し、
前記第1の位相は、前記第2の位相と異なり、
各前記ユニットセルは、第3の位相の第3の画素を撮像する第3の光電素子および第4の位相の第4の画素を撮像する第4の光電素子を更に含み、
前記第1の位相、前記第2の位相、前記第3の位相、および前記第4の位相は異なり、
各前記ユニットセルの前記第1の光電素子、前記第2の光電素子、前記第3の光電素子、および前記第4の光電素子は、異なる材料でできており、且つ同じ高さであり、
前記第1の位相、前記第2の位相、前記第3の位相、および前記第4の位相は、それぞれπ/4、3π/4、5π/8、および7π/8であるイメージセンサ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/669,548 | 2017-08-04 | ||
| US15/669,548 US10423122B2 (en) | 2017-08-04 | 2017-08-04 | Lens-free image sensor using phase-shifting hologram |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019033467A JP2019033467A (ja) | 2019-02-28 |
| JP6677696B2 true JP6677696B2 (ja) | 2020-04-08 |
Family
ID=65229527
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017214953A Active JP6677696B2 (ja) | 2017-08-04 | 2017-11-07 | 位相シフトのホログラムを用いたレンズフリーイメージセンサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10423122B2 (ja) |
| JP (1) | JP6677696B2 (ja) |
| CN (1) | CN109388049B (ja) |
| TW (1) | TWI661283B (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11317039B1 (en) * | 2021-01-06 | 2022-04-26 | Visera Technologies Company Limited | Image-sensing device |
| TWI811109B (zh) * | 2022-09-16 | 2023-08-01 | 國立中正大學 | 全息圖檢測方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4188870B2 (ja) | 2004-04-06 | 2008-12-03 | 三星電子株式会社 | ホログラム媒体記録再生装置およびホログラム媒体再生装置 |
| JP4455215B2 (ja) * | 2004-08-06 | 2010-04-21 | キヤノン株式会社 | 撮像装置 |
| WO2009079498A2 (en) * | 2007-12-17 | 2009-06-25 | Omnivision Technologies, Inc. | Reflowable camera module with integrated flash |
| JP2010152176A (ja) * | 2008-12-25 | 2010-07-08 | Mitsubishi Electric Corp | 投写型表示装置 |
| ES2623375T3 (es) | 2009-10-20 | 2017-07-11 | The Regents Of The University Of California | Holografía y microscopia celular incoherente sin lente en un chip |
| TWI515885B (zh) * | 2009-12-25 | 2016-01-01 | 新力股份有限公司 | 半導體元件及其製造方法,及電子裝置 |
| JP5644177B2 (ja) * | 2010-05-07 | 2014-12-24 | ソニー株式会社 | 固体撮像装置、および、その製造方法、電子機器 |
| JP6179902B2 (ja) | 2012-08-31 | 2017-08-16 | 国立大学法人京都工芸繊維大学 | デジタルホログラフィ装置およびデジタルホログラフィ再生方法 |
| US9549099B2 (en) | 2013-03-12 | 2017-01-17 | Apple Inc. | Hybrid image sensor |
| EP2778601A1 (en) * | 2013-03-15 | 2014-09-17 | Siemens Healthcare Diagnostics Inc. | Optical metrology by light beam analysis |
| US9224881B2 (en) | 2013-04-04 | 2015-12-29 | Omnivision Technologies, Inc. | Layers for increasing performance in image sensors |
| WO2015135003A2 (en) * | 2014-03-04 | 2015-09-11 | California Institute Of Technology | Directional optical receiver |
| CN104252844B (zh) | 2014-09-23 | 2017-04-05 | 京东方科技集团股份有限公司 | 像素电路及其驱动方法、有机发光显示面板及显示装置 |
| TWI552594B (zh) | 2014-10-27 | 2016-10-01 | 聯詠科技股份有限公司 | 用於影像感測裝置的色彩濾波陣列及其製造方法 |
| JP6686323B2 (ja) | 2015-08-13 | 2020-04-22 | 大日本印刷株式会社 | ホログラム構造体 |
| KR102414030B1 (ko) | 2015-11-18 | 2022-06-29 | 에스케이하이닉스 주식회사 | 이미지 센서 |
| JP2017110991A (ja) * | 2015-12-16 | 2017-06-22 | セイコーエプソン株式会社 | 計測システム、計測方法、ロボット制御方法、ロボット、ロボットシステムおよびピッキング装置 |
-
2017
- 2017-08-04 US US15/669,548 patent/US10423122B2/en active Active
- 2017-11-07 JP JP2017214953A patent/JP6677696B2/ja active Active
-
2018
- 2018-05-04 TW TW107115257A patent/TWI661283B/zh active
- 2018-06-05 CN CN201810570330.2A patent/CN109388049B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10423122B2 (en) | 2019-09-24 |
| TWI661283B (zh) | 2019-06-01 |
| CN109388049A (zh) | 2019-02-26 |
| US20190041794A1 (en) | 2019-02-07 |
| TW201910941A (zh) | 2019-03-16 |
| JP2019033467A (ja) | 2019-02-28 |
| CN109388049B (zh) | 2021-01-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9772432B2 (en) | Diffraction gratings producing curtains of minimum intensity separated by foci and extending to a focal plane | |
| EP3129813B1 (en) | Low-power image change detector | |
| KR102718698B1 (ko) | 3d 이미지화 시스템 및 방법 | |
| JP6725526B2 (ja) | 分散して空間的符号化画像を作成する画像を伴う撮像素子 | |
| US20110193956A1 (en) | Apparatus and a method for performing a difference measurement of an object image | |
| JPWO2018221025A1 (ja) | 撮像装置、画像処理装置、撮像システム、画像処理方法、及び記録媒体 | |
| JP6677696B2 (ja) | 位相シフトのホログラムを用いたレンズフリーイメージセンサ | |
| JP7373015B2 (ja) | 撮像方法 | |
| CN104777737A (zh) | 一种基于非相干数字全息技术的三维光谱成像装置及方法 | |
| KR20180119428A (ko) | 위상광학 이미지 획득 장치 및 방법 | |
| CN101794802B (zh) | 固态成像设备和电子装置 | |
| EP3777129B1 (fr) | Capteur d'images aeroporte realisant des prises de vue matricielle par decalage temporel et sommation multi-spectrales | |
| EP3994529A1 (en) | Calibration-free phase shifting procedure for self-interference holography | |
| FR2972271A1 (fr) | Systeme d'imagerie a haute resolution | |
| KR102578652B1 (ko) | 이미지-감지 디바이스 | |
| JP7744766B2 (ja) | インコヒーレントデジタルホログラフィ撮像装置 | |
| CN108594617A (zh) | 非相干数字全息大视场成像记录方法与装置 | |
| CN114923569A (zh) | 一种基于计算成像的多光谱相机 | |
| KR20240164435A (ko) | 전기적으로 스위칭 가능한 광학 물질 및 그 형성 방법 | |
| JP2025006334A (ja) | 撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190129 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20200109 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200313 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6677696 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |