JP6657397B2 - シートベルトリトラクタ及びシートベルトシステム - Google Patents
シートベルトリトラクタ及びシートベルトシステム Download PDFInfo
- Publication number
- JP6657397B2 JP6657397B2 JP2018520960A JP2018520960A JP6657397B2 JP 6657397 B2 JP6657397 B2 JP 6657397B2 JP 2018520960 A JP2018520960 A JP 2018520960A JP 2018520960 A JP2018520960 A JP 2018520960A JP 6657397 B2 JP6657397 B2 JP 6657397B2
- Authority
- JP
- Japan
- Prior art keywords
- rotation
- seat belt
- spool
- detection unit
- spring case
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R22/00—Safety belts or body harnesses in vehicles
- B60R22/48—Control systems, alarms, or interlock systems, for the correct application of the belt or harness
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Automotive Seat Belt Assembly (AREA)
Description
シートベルトを巻き取るスプールと、
前記スプールの回転軸に一端が接続され、前記スプールを前記シートベルトの巻き取り方向に付勢するスパイラルスプリングと、
前記スパイラルスプリングの他端が連結され、前記回転軸を中心に回転可能に設けられたスプリングケースと、
前記スプールの回転を検知する第1の回転検知部と、
前記スプリングケースの回転を検知する第2の回転検知部と、
前記第1の回転検知部により回転が検知された前記スプールの回転量と前記第2の回転検知部により回転が検知された前記スプリングケースの回転量との差に応じて、前記スプリングケースを回転させるモータと、
前記差を演算する演算部と、
前記第1の回転検知部と前記第2の回転検知部との少なくとも一方と、前記演算部とが配置された共通の基板とを備える、シートベルトリトラクタが提供される。
当該シートベルトリトラクタと、前記差に応じて前記モータの駆動を制御する制御装置とを備える、シートベルトシステムが提供される。
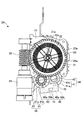
3A,3B,3C リトラクタ
15,115 カバー
16,116 リテーナ
17 ベースフレーム
18 フレームプレート
19 フレーム
20 スプール
20a シャフト
21 ブッシュ
22 スパイラルスプリング
23 スプリングケース
23a 外歯
24 モータ
25 ウォーム
38 第1の回転ディスク
40 第1の回転検知部
40a 第1の磁気検知部
40b 第2の磁気検知部
41,141 第1のマグネット
41a,61a N極マグネット
41b,61b S極マグネット
42 第1のマグネット保持部材
43 第1の被伝動ギア
43a,63a 外歯
44 伝動ギア
58 第2の回転ディスク
60 第2の回転検知部
60a 第3の磁気検知部
60b 第4の磁気検知部
61,161 第2のマグネット
62 第2のマグネット保持部材
63 第2の被伝動ギア
70,71,72,170 基板
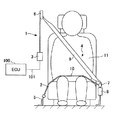
110 制御部
151,152 軸心
171 第1の基板表面
172 第2の基板表面
180 基板ケース
Claims (10)
- シートベルトを巻き取るスプールと、
前記スプールの回転軸に一端が接続され、前記スプールを前記シートベルトの巻き取り方向に付勢するスパイラルスプリングと、
前記スパイラルスプリングの他端が連結され、前記回転軸を中心に回転可能に設けられたスプリングケースと、
前記スプールの回転を検知する第1の回転検知部と、
前記スプリングケースの回転を検知する第2の回転検知部と、
前記第1の回転検知部により回転が検知された前記スプールの回転量と前記第2の回転検知部により回転が検知された前記スプリングケースの回転量との差に応じて、前記スプリングケースを回転させるモータと、
前記差を演算する演算部と、
前記第1の回転検知部と前記第2の回転検知部との少なくとも一方と、前記演算部とが配置された共通の基板とを備える、シートベルトリトラクタ。 - シートベルトを巻き取るスプールと、
前記スプールの回転軸に一端が接続され、前記スプールを前記シートベルトの巻き取り方向に付勢するスパイラルスプリングと、
前記スパイラルスプリングの他端が連結され、前記回転軸を中心に回転可能に設けられたスプリングケースと、
前記スプールの回転を検知する第1の回転検知部と、
前記スプリングケースの回転を検知する第2の回転検知部と、
前記第1の回転検知部により回転が検知された前記スプールの回転量と前記第2の回転検知部により回転が検知された前記スプリングケースの回転量との差に応じて、前記スプリングケースを回転させるモータと、
前記スプールと前記スプリングケースとの間に配置された基板とを備え、
前記基板は、前記スプールの側の第1の基板表面と、前記スプリングケースの側の第2の基板表面とを有し、
前記第1の回転検知部は、前記第1の基板表面に配置され、前記第2の回転検知部は、前記第2の基板表面に配置された、シートベルトリトラクタ。 - 前記モータは、前記差が又は前記差に応じて変化する変化量が目標値に一致するように、前記スプリングケースを回転させる、請求項1又は2に記載のシートベルトリトラクタ。
- 前記目標値は、車両の状態に応じて設定された値である、請求項3に記載のシートベルトリトラクタ。
- 前記スプリングケースの外歯に噛み合う被伝動ギアと、
前記被伝動ギアの回転に伴って回転するマグネットとを備え、
前記第2の回転検知部は、前記マグネットの回転を検知することによって前記スプリングケースの回転を検知する、請求項1から4のいずれか一項に記載のシートベルトリトラクタ。 - 前記モータは、前記外歯に噛み合うウォームを介して前記スプリングケースを回転させる、請求項5に記載のシートベルトリトラクタ。
- 前記ウォームは、セルフロック可能な進み角を有する、請求項6に記載のシートベルトリトラクタ。
- 前記スプールとは異なる軸心で、前記スプールの回転に伴って回転する第1のマグネットと、
前記スプールと同じ軸心で、前記スプリングケースの回転に伴って回転する第2のマグネットとを備え、
前記第1の回転検知部は、前記第1のマグネットの回転によって変化する磁界の強さを検出することによって前記スプールの回転を検知し、
前記第2の回転検知部は、前記第2のマグネットの回転によって変化する磁界の強さを検出することによって前記スプリングケースの回転を検知する、請求項1から4のいずれか一項に記載のシートベルトリトラクタ。 - 前記差に応じて前記モータの駆動を制御する制御部が、前記基板に配置された、請求項1から8のいずれか一項に記載のシートベルトリトラクタ。
- 請求項1から8のいずれか一項に記載のシートベルトリトラクタと、
前記差に応じて前記モータの駆動を制御する制御装置とを備える、シートベルトシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016112247 | 2016-06-03 | ||
| JP2016112247 | 2016-06-03 | ||
| PCT/JP2017/020291 WO2017209189A1 (ja) | 2016-06-03 | 2017-05-31 | シートベルトリトラクタ及びシートベルトシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017209189A1 JPWO2017209189A1 (ja) | 2019-03-28 |
| JP6657397B2 true JP6657397B2 (ja) | 2020-03-04 |
Family
ID=60478668
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018520960A Active JP6657397B2 (ja) | 2016-06-03 | 2017-05-31 | シートベルトリトラクタ及びシートベルトシステム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6657397B2 (ja) |
| WO (1) | WO2017209189A1 (ja) |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59122955U (ja) * | 1983-02-09 | 1984-08-18 | 三菱自動車工業株式会社 | 速度感応式可変巻取力のベルトリトラクタ |
| JPS6087754U (ja) * | 1983-11-11 | 1985-06-17 | 株式会社東海理化電機製作所 | ウエビング巻取装置 |
| JP2005247059A (ja) * | 2004-03-02 | 2005-09-15 | Tokai Rika Co Ltd | ウエビング巻取装置 |
| JP5313841B2 (ja) * | 2009-10-29 | 2013-10-09 | オートリブ ディベロップメント エービー | シートベルト装置 |
| JP5462070B2 (ja) * | 2010-05-17 | 2014-04-02 | タカタ株式会社 | 位置検知装置、この位置検知装置を備えたシートベルトリトラクタ、およびこのシートベルトリトラクタを備えたシートベルト装置 |
| JP2012030753A (ja) * | 2010-08-02 | 2012-02-16 | Honda Motor Co Ltd | 車両用シートベルト装置 |
| JP5478670B2 (ja) * | 2012-06-21 | 2014-04-23 | 本田技研工業株式会社 | シートベルト装置 |
-
2017
- 2017-05-31 JP JP2018520960A patent/JP6657397B2/ja active Active
- 2017-05-31 WO PCT/JP2017/020291 patent/WO2017209189A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2017209189A1 (ja) | 2019-03-28 |
| WO2017209189A1 (ja) | 2017-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8960585B2 (en) | Seatbelt retractor and seatbelt apparatus including the same | |
| JP5462070B2 (ja) | 位置検知装置、この位置検知装置を備えたシートベルトリトラクタ、およびこのシートベルトリトラクタを備えたシートベルト装置 | |
| EP2676851B1 (en) | Webbing take-up device | |
| EP2080677A1 (en) | Seatbelt take-up device, seatbelt device, seatbelt take-up method, computer program, and seatbelt system | |
| US11440501B2 (en) | Integrated motor retractor (IMR) with motion profiles | |
| US20190337482A1 (en) | Restraining system for a seat belt buckle | |
| JP2006151337A (ja) | シートベルトリトラクタ、シートベルト装置、シートベルト装置付車両 | |
| EP1759938B1 (en) | Seat belt apparatus and vehicle | |
| JP2010058679A (ja) | 乗員拘束装置 | |
| JP6657397B2 (ja) | シートベルトリトラクタ及びシートベルトシステム | |
| JP2007326538A (ja) | 車両のシートベルト装置 | |
| JP2006151338A (ja) | シートベルトリトラクタ、シートベルト装置、シートベルト装置付車両 | |
| JP5032243B2 (ja) | シートベルトリトラクタおよびこれを備えたシートベルト装置 | |
| JP6737667B2 (ja) | シートベルト巻き取り装置 | |
| JP6708506B2 (ja) | シートベルトリトラクタ | |
| JP6773468B2 (ja) | シートベルトリトラクタ | |
| JP2020114738A (ja) | シートベルトリトラクタ | |
| JP2006131118A (ja) | シートベルトリトラクタ、シートベルト装置、シートベルト装置付車両 | |
| KR20150140911A (ko) | 시트벨트용 전자식 리트랙터 | |
| JP5388359B2 (ja) | シートベルトリトラクタおよびこれを備えたシートベルト装置 | |
| JP2006151339A (ja) | シートベルトリトラクタ、シートベルト装置、シートベルト装置付車両 | |
| JPH0349772B2 (ja) | ||
| JP2006123822A (ja) | シートベルトリトラクタ、シートベルト装置、シートベルト装置付車両 | |
| JP2003267188A (ja) | シートベルト装置 | |
| JP2005247059A (ja) | ウエビング巻取装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181102 |
|
| AA64 | Notification of invalidation of claim of internal priority (with term) |
Free format text: JAPANESE INTERMEDIATE CODE: A241764 Effective date: 20190129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6657397 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S343 | Written request for registration of root pledge or change of root pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316354 |
|
| SZ02 | Written request for trust registration |
Free format text: JAPANESE INTERMEDIATE CODE: R316Z02 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R316531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R316533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S343 | Written request for registration of root pledge or change of root pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316350 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S343 | Written request for registration of root pledge or change of root pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316350 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R316531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R316533 |