JP6602829B2 - ガス充填方法 - Google Patents
ガス充填方法 Download PDFInfo
- Publication number
- JP6602829B2 JP6602829B2 JP2017224596A JP2017224596A JP6602829B2 JP 6602829 B2 JP6602829 B2 JP 6602829B2 JP 2017224596 A JP2017224596 A JP 2017224596A JP 2017224596 A JP2017224596 A JP 2017224596A JP 6602829 B2 JP6602829 B2 JP 6602829B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- gas
- temperature
- filling
- predetermined position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M53/00—Fuel-injection apparatus characterised by having heating, cooling or thermally-insulating means
- F02M53/04—Injectors with heating, cooling, or thermally-insulating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/70—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by fuel cells
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/30—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling fuel cells
- B60L58/32—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling fuel cells for controlling the temperature of fuel cells, e.g. by controlling the electric load
- B60L58/33—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling fuel cells for controlling the temperature of fuel cells, e.g. by controlling the electric load by cooling
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M21/00—Apparatus for supplying engines with non-liquid fuels, e.g. gaseous fuels stored in liquid form
- F02M21/02—Apparatus for supplying engines with non-liquid fuels, e.g. gaseous fuels stored in liquid form for gaseous fuels
- F02M21/0203—Apparatus for supplying engines with non-liquid fuels, e.g. gaseous fuels stored in liquid form for gaseous fuels characterised by the type of gaseous fuel
- F02M21/0206—Non-hydrocarbon fuels, e.g. hydrogen, ammonia or carbon monoxide
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D7/00—Control of flow
- G05D7/06—Control of flow characterised by the use of electric means
- G05D7/0617—Control of flow characterised by the use of electric means specially adapted for fluid materials
- G05D7/0629—Control of flow characterised by the use of electric means specially adapted for fluid materials characterised by the type of regulator means
- G05D7/0635—Control of flow characterised by the use of electric means specially adapted for fluid materials characterised by the type of regulator means by action on throttling means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/66—Ambient conditions
- B60L2240/662—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/56—Temperature prediction, e.g. for pre-cooling
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M2250/00—Fuel cells for particular applications; Specific features of fuel cell system
- H01M2250/20—Fuel cells in motive systems, e.g. vehicle, ship, plane
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/30—Hydrogen technology
- Y02E60/32—Hydrogen storage
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/30—Hydrogen technology
- Y02E60/50—Fuel cells
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/40—Application of hydrogen technology to transportation, e.g. using fuel cells
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Chemical Kinetics & Catalysis (AREA)
- General Chemical & Material Sciences (AREA)
- Oil, Petroleum & Natural Gas (AREA)
- Filling Or Discharging Of Gas Storage Vessels (AREA)
- Fuel Cell (AREA)
Description
本発明は、ガス充填方法に関する。より詳しくは、ガスの供給源と移動体のタンクとを冷却装置が設けられたガス流路で接続し、冷却装置で冷却したガスをタンクに充填するガス充填方法に関する。
燃料電池車両は、含酸素の空気と燃料ガスである水素ガスとを燃料電池に供給し、これによって発電した電力を利用して電動機を駆動することにより走行する。近年、このような燃料電池を、動力を発生するためのエネルギー源として利用した燃料電池車両の実用化が進められている。燃料電池で発電するには水素ガスが必要となるが、近年の燃料電池車両では、高圧タンクや吸蔵合金を備えた水素タンク内に予め十分な量の水素ガスを貯蔵しておき、走行にはタンク内の水素ガスを利用するものが主流となっている。また、これに合わせて、タンク内にできるだけ多くの量の水素ガスを速やかに充填する充填技術に関する研究も盛んに進められている。
水素ガスはタンク内において圧縮によって発熱する。このため近年では、水素ガスの充填中におけるタンク内の温度上昇を抑制するため、水素ガスの流路に設けられたプレクーラによって水素ガスを−40℃程度まで冷却する技術が主流となっている。
例えば非特許文献1には、充填中における昇圧率を所定の数式に基づいて可変させながら水素ガスを充填する充填方法が示されている。非特許文献1に記載の充填方法では、水素ガスの流路のうちプレクーラの下流側に設けられた温度センサの検出値に、質量平均処理を施すことによって得られる温度パラメータに基づいて昇圧率を可変させる。
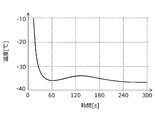
図11は、充填開始直後に温度センサによって検出される温度の時間変化を示す図である。図11に示すように、温度センサは、充填の開始時点では外気温を示し、その後数十秒程度の時間をかけてプレクーラによる冷却温度まで低下した後、概ね一定の温度を示す。このように充填を開始してから数十秒が経過するまでの間において、温度センサの検出値をそのまま用いて温度パラメータの値を算出し、昇圧率を決定すると、充填に時間がかかってしまう。
そこで非特許文献1の充填方法では、充填を開始してから数十秒(具体的には、例えば30秒)が経過するまでの間は、昇圧率を決定するための温度パラメータの値は、温度センサの検出値を用いて決定せずに、予め定められた固定値を利用している。ここで固定値には、充填中に最終的に到達すると考えられる値が用いられている。また充填を開始してから数十秒が経過し、温度センサの検出値を用いることができる状態になった後には、温度パラメータの値を固定値から温度センサの検出値に基づいて算出された値に切り替えて充填を継続する。
判田 圭、Steve Mathison、FCV用MC formula 水素充填方式の開発、自動車技術会 2015年秋季大会学術講演会講演予稿集
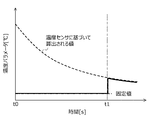
非特許文献1の充填方法に示すように、充填を開始してから数十秒が経過するまでの間は、温度パラメータに固定値を利用することにより、充填開始直後の充填速度を向上できる。しかしながら、プレクーラに不具合がある場合には、プレクーラで水素ガスの温度を十分に低下させることができない場合もある。このような場合、図12に示すように、時刻t0において充填を開始した後、時刻t1において温度センサの検出値を用いることができる状態になったことに応じて、充填制御に用いる温度パラメータの値を、この時刻t1において固定値から温度センサの検出値に基づいて直接的に算出された値に切り替えた際に大きなギャップが生じてしまい、結果として水素タンクが想定以上に過熱するおそれがある。
また非特許文献1の充填方法では、プレクーラとノズルの間に設置されるブレークアウェイカップリングの近傍に設けられた温度センサを用いて温度パラメータの値を算出している。しかしながらプレクーラで冷却された水素ガスの温度は、その後ホースを介して車両の水素タンクに至るまでの過程で外気によって上昇する。このため、水素タンクに供給される水素ガスの実際の温度に応じて昇圧率を適切に決定するためには、温度センサはできるだけ車両に近い位置、換言すればプレクーラからできるだけ離れた位置(すなわち、ブレークアウェイカップリングよりもノズルに近い位置)に設けることが好ましい。しかしながら温度センサをプレクーラから離れた位置に設けると、水素ガスの充填の開始直後に温度センサによって検出される温度が十分に低下するまでにかかる時間が長くなってしまい、上記のように固定値を利用する期間が長くなるおそれがある。したがって、上記のように誤った固定値の下で充填を行ってしまった場合には、水素タンクがさらに過熱するおそれがある。
本発明は、充填開始直後におけるタンクの過熱を抑制できるガス充填方法を提供することを目的とする。
(1)本発明のガス充填方法は、ガスの供給源(例えば、後述の蓄圧器91)と移動体(例えば、後述の燃料電池車両V)のタンク(例えば、後述の水素タンク31)とを冷却装置(例えば、後述のプレクーラ96)及び流量調整装置(例えば、後述の流量制御弁84)が設けられたガス流路(例えば、後述のステーション配管81、外部ホース82、及び継手部83)で接続し、前記ガス流路の第1所定位置(例えば、後述の測定位置Q1,Q1´)における温度パラメータに基づいて充填制御を行う方法であって、環境温度、前記ガス流路を流れるガスの質量流量、及び前記ガス流路のうち前記第1所定位置より上流側の第2所定位置(例えば、後述の測定位置Q2,Q2´)におけるガスの温度又はガスと相関のある温度の値を取得する工程(例えば、後述の図5のS24、図6のS34、図8のS45,S49等)と、前記第1所定位置から前記第2所定位置までの熱容量と、前記環境温度の取得値と、前記質量流量の取得値と、前記温度の取得値とに基づいて、現在から予測時間後までガスの充填を継続した場合における前記予測時間後の前記温度パラメータの値を予測する工程(例えば、後述の図5のS25、図6のS36、図8のS46,S50等)と、を備え、前記温度パラメータの予測値に基づいて充填制御を行うことを特徴とする。
(2)この場合、ガス充填方法は、前記予測時間が経過した後、前記第1所定位置に設けられた第1ガス温度センサ(例えば、後述の第1ステーション温度センサ89,89A)の検出値と前記質量流量の取得値とに基づいて前記温度パラメータの値を算出する工程(例えば、後述の図3のS11)と、をさらに備え、前記予測時間が経過するまでは前記温度パラメータの予測値に基づいて充填制御を行い、前記予測時間が経過した後は前記温度パラメータの算出値に基づいて充填制御を行い、前記予測時間は、前記質量流量の取得値に応じて変更することが好ましい。
(3)この場合、前記質量流量の取得値が所定値より小さい場合には、前記質量流量の取得値が前記所定値より大きい場合よりも前記予測時間を長くすることが好ましい。
(4)本発明のガス充填方法は、ガスの供給源(例えば、後述の蓄圧器91)と移動体(例えば、後述の燃料電池車両V)のタンク(例えば、後述の水素タンク31)とを冷却装置(例えば、後述のプレクーラ96)及び流量調整装置(例えば、後述の流量制御弁84)が設けられたガス流路(例えば、後述のステーション配管81、外部ホース82、及び継手部83)で接続し、前記ガス流路の第1所定位置(例えば、後述の測定位置Q1,Q1´)における温度パラメータに基づいて充填制御を行う方法であって、環境温度、前記ガス流路を流れるガスの質量流量、及び前記ガス流路のうち前記第1所定位置より上流側の第2所定位置(例えば、後述の測定位置Q2,Q2´)におけるガスの温度又はガスと相関のある温度の値を取得する第1工程(例えば、後述の図8のS45)と、前記第1所定位置から前記第2所定位置までの熱容量と、前記環境温度の取得値と、前記質量流量の取得値と、前記温度の取得値とに基づいて、現在から将来の予測時刻までガスの充填を継続した場合における前記予測時刻における前記温度パラメータの値を予測する第2工程(例えば、後述の図8のS46)と、現在から所定時間にわたり前記温度パラメータの予測値に基づいて充填制御を行う第3工程(例えば、後述の図8のS47)と、前記予測時刻になるまでの間に前記第1〜第3工程を2回以上繰り返し実行することを特徴とする。
(5)この場合、前記ガス流路は、前記供給源から延びる第1配管(例えば、後述のステーション配管81)と、前記移動体のレセプタクル(例えば、後述のレセプタクル38)に接続されるノズル部(例えば、後述の充填ノズル92)から延びる第2配管(例えば、後述の外部ホース82)と、前記第1配管と前記第2配管とを接続する継手部(例えば、後述の継手部83)とを備え、前記第1配管には前記冷却装置が設けられ、前記第1所定位置は、前記ノズル部又は当該ノズル部と前記継手部との間(例えば、後述の測定位置Q1)に定められ、前記第2所定位置は、前記継手部、前記冷却装置、又は前記継手部と前記冷却装置との間(例えば、後述の測定位置Q2)に定められることが好ましい。
(6)この場合、前記ガス流路は、前記供給源から延びる第1配管(例えば、後述のステーション配管81)と、前記移動体のレセプタクル(例えば、後述のレセプタクル38)に接続されるノズル部(例えば、後述の充填ノズル92)から延びる第2配管(例えば、後述の外部ホース82)と、前記第1配管と前記第2配管とを接続する継手部(例えば、後述の継手部83)とを備え、前記第1配管には前記冷却装置が設けられ、前記第1所定位置は、前記継手部又は当該継手部と前記冷却装置との間(例えば、後述の測定位置Q1´)に定められ、前記第2所定位置は、前記冷却装置又は前記第1所定位置と前記冷却装置との間(例えば、後述の測定位置Q2´)に定められることが好ましい。
(1)本発明のガス充填方法では、ガス流路の第1所定位置において定義される温度パラメータに基づいて充填制御を行う。特に本発明では、環境温度と質量流量と上記第1所定位置よりも上流側の第2所定位置におけるガスの温度又はガスと相関のある温度の値を取得し、第1所定位置から第2所定位置までの熱容量と、環境温度取得値と、質量流量取得値と、ガス温度取得値とに基づいて、現在から予測時間後までガスの充填を継続した場合における予測時間後の温度パラメータの値を予測し、さらにこの温度パラメータ予測値に基づいて充填制御を行う。これにより、例えば充填開始直後であって現在から予測時間後までの間において、第2所定位置よりも冷却装置からの距離が遠い第1所定位置に設けられる第1ガス温度センサを用いて直接的に温度パラメータの値を算出することができない場合であっても、現在から予測時間後における温度パラメータの予測値を算出し、この予測値に基づいて充填制御を行うことができる。したがって例えば予測時間後に、第1ガス温度センサを用いて直接的に温度パラメータの値を算出できる状態になったことに応じて、充填制御に用いる温度パラメータの値を、上述のような予測値から、第1ガス温度センサの検出値に基づいて直接的に算出された値に切り替えた場合であっても、これら2つの値のギャップを小さくできるので、充填開始直後におけるタンクの不要な過熱を抑制することができる。
(2)本発明のガス充填方法では、予測時間が経過するまでは第2所定位置におけるガス温度に基づいて算出した温度パラメータの予測値に基づいた充填制御を行い、予測時間が経過した後は、第1所定位置に設けられた第1ガス温度センサの検出値に基づく温度パラメータの算出値に基づいた充填制御に切り替える。ここで本発明のガス充填方法では、質量流量の取得値に応じて予測時間を変更することにより、充填制御を切り替えるタイミングを、実際の充填の状態に応じて決定することができる。
(3)ガスの質量流量が少なくなると、配管のヒートマスによる影響が大きくなるため、ガスの温度が下がりにくくなってしまい、タンクの過熱のリスクが上昇すると考えられる。そこで本発明のガス充填方法では、質量流量の取得値が所定値より小さい場合には、取得値が所定値より大きい場合よりもタンクは過熱しやすいと判断し、予測時間を長く、すなわち充填制御を切り替えるタイミングを遅くする。これにより、実際の充填の状態に応じた適切なタイミングで充填制御を切り替えることができる。
(4)本発明のガス充填方法では、環境温度と質量流量と第2所定位置におけるガス温度の値を取得する第1工程と、熱容量、環境温度取得値、質量流量取得値、及びガス温度取得値に基づいて、現在から将来の予測時刻までガスの充填を継続した場合における予測時刻における温度パラメータの値を予測する第2工程と、この温度パラメータ予測値に基づいて充填制御を行う第3工程と、を上記予測時刻になるまでの間に2回以上繰り返し実行する。このように予測時刻になるまでの間に複数回にわたり温度パラメータの値を予測する機会を設けることにより、温度パラメータの予測値を段階的に適切な値に、すなわち第1ガス温度センサの検出値に基づいて直接的に算出される値に近づけることができるので、充填開始直後におけるタンクの過熱をさらに抑制できる。
(5)上記(2)の発明のように、予測時間が経過した後は、第1所定位置に設けられた第1ガス温度センサの検出値に基づいて算出された温度パラメータの値を用いて充填制御を行う場合がある。本発明のガス充填方法では、温度パラメータの定義に用いられる第1所定位置を、ガス流路のうち移動体に最も近いノズル部又はノズル部と継手部との間に定める。従って本発明によれば、予測時間が経過した後は、ノズル部又はノズル部と継手部との間に設けた第1ガス温度センサの検出値を用いて算出した温度パラメータの値に基づいて、タンクに供給されるガスの実際の温度に応じた温度パラメータの下で充填制御を行うことができる。
(6)本発明のガス充填方法では、温度パラメータの定義に用いられる第1所定位置を、ガス流路のうち継手部又は継手部と冷却装置との間とする。従来から流通しているステーションは、継手部又は継手部と冷却装置との間にガス温度センサを設けたものが多い。したがってこのような位置に第1所定位置を設定することにより、従来から存在するステーションに小さな設備変更を加えるだけで本発明を適用できる。
<第1実施形態>
以下、本発明の第1実施形態について、図面を参照しながら説明する。
図1は、本実施形態に係るガス充填方法が適用された水素充填システムSの構成を示す図である。水素充填システムSは、水素ガスを燃料ガスとして走行する燃料電池車両Vと、この車両Vの水素タンクに水素ガスを供給する水素ステーション9と、を組み合わせて構成される。以下では、始めに車両V側の構成について説明し、次にステーション9側の構成について説明する。
以下、本発明の第1実施形態について、図面を参照しながら説明する。
図1は、本実施形態に係るガス充填方法が適用された水素充填システムSの構成を示す図である。水素充填システムSは、水素ガスを燃料ガスとして走行する燃料電池車両Vと、この車両Vの水素タンクに水素ガスを供給する水素ステーション9と、を組み合わせて構成される。以下では、始めに車両V側の構成について説明し、次にステーション9側の構成について説明する。
車両Vは、ステーション9から供給された水素ガスを貯蔵する水素タンク31と、この水素タンク31から延びる車両配管39と、水素タンク31に貯蔵された水素ガスによって発電し、発電した電力を利用して走行する燃料電池システム(図示せず)と、水素タンク31に関するデータ信号を水素ステーション9へ送信する赤外線通信機5と、この赤外線通信機5から送信するデータ信号を生成する通信演算ECU6と、を備える。
車両配管39は、水素ステーション9の後述の充填ノズル92が篏合するレセプタクル38と、車両配管39のうちレセプタクル38の近傍に設けられ水素タンク31側からレセプタクル38へ水素ガスが逆流するのを防止するための逆止弁36と、を備える。
通信演算ECU6には、上述の水素タンク31に関する情報を取得する手段として、タンク内温度センサ41と、タンク内圧力センサ42と、が接続されている。タンク内温度センサ41は、水素タンク31内の水素ガスの温度を検出し、検出値に対応した信号を通信演算ECU6に送信する。タンク内圧力センサ42は、水素タンク31内の圧力を検出し、検出値に対応した信号を通信演算ECU6に送信する。
通信演算ECU6は、上記センサ41,42の検出信号をA/D変換するインターフェースや、後述の信号生成処理を実行するCPUや、上記処理の下で決定した態様で赤外線通信機5を駆動する駆動回路や、各種データを記憶する記憶装置等で構成されるマイクロコンピュータである。
通信演算ECU6の記憶装置には、後述のデータ信号生成処理の実行に係るプログラムや、車両Vが製造された時点で搭載されていた水素タンク31の容積値を含む固有情報が記録されている。なお水素タンクの容積値の他、例えば、容積値から既知の変換則によって導出される容量や水素タンクの材質等、製造時点で特定できる水素タンク31に関する情報は、この固有情報に含まれる。
通信演算ECU6のCPUは、例えば、レセプタクル34を保護するフューエルリッドが開かれたことを契機として、通信機5から水素ステーション9へ送信される信号を生成する信号生成処理を開始する。また通信演算ECU6のCPUは、例えば上記フューエルリッドが閉じられることより水素ガスの充填が不可能な状態になったことを契機として、信号生成処理を終了する。
信号生成処理では、水素タンク内の温度の現在の値に相当する温度送信値TIRと、水素タンク内の圧力の現在の値に相当する圧力送信値PIRと、水素タンクの容積の現在の値に相当する容積送信値VIRと、が所定の周期毎に取得され、これら値(TIR,PIR,VIR)に応じたデータ信号を生成する。温度送信値TIRは、その時のタンク内温度センサ41の検出値が用いられる。圧力送信値PIRは、その時のタンク内圧力センサ42の検出値が用いられる。また容積送信値VIRは、上述の記憶装置に記録されたものが用いられる。
また信号生成処理では、上述のように周期的に取得される温度送信値TIR及び圧力送信値PIRと各送信値に対して予め定められたアボート閾値とを比較しており、充填中にこれら送信値の何れかがアボート閾値を超えた場合には、水素ステーション9に対して充填の終了を要請するためのアボート信号を生成する。
通信演算ECU6の駆動回路は、上記信号生成処理によって生成されたデータ信号及びアボート信号に応じて赤外線通信機5を駆動(点滅)させる。これにより、水素タンク内の状態に関する状態情報(すなわち、温度送信値TIR及び圧力送信値PIR等)並びに固有情報(すなわち、容積送信値VIR等)を含んだデータ信号や、アボート信号が水素ステーション9へ送信される。
水素ステーション9は、車両Vに供給するための水素ガスが高圧で貯蔵されている蓄圧器91と、蓄圧器91から延びるステーション配管81と、充填ノズル92から延びる外部ホース82と、これらステーション配管81と外部ホース82とを接続し一体の流路を形成する継手部83と、ステーション配管81に設けられたプレクーラ96及び流量制御弁84と、この流量制御弁84を制御するステーションECU95と、を備える。
ステーションECU95は、充填ノズル92が車両Vに設けられたレセプタクル38に接続された後、後に図2〜図5を参照して説明する手順に従って流量制御弁84の開度を調整することにより、蓄圧器91に貯蔵された高圧水素ガスを車両Vの水素タンク31に充填する充填制御を実行する。
継手部83は、所謂ブレークアウェイカップリングである。すなわち、継手部83は、外部ホース82に強い張力が生じた場合に、蓄圧器91側からの水素ガスの漏出を防ぎながら、外部ホース82とステーション配管81との接続を切り離す機能を備える継手である。
プレクーラ96は、ステーション配管81のうち流量制御弁84よりも継手部83側に設けられている。プレクーラ96は、図示しない冷媒とステーション配管81を流れる水素ガスとの間の熱交換を促進する熱交換器を備え、この熱交換器により、流量制御弁84を経て減圧された水素ガスを所定の冷却温度(例えば、約−40℃)まで冷却する。
ステーションECU95には、ステーション配管81を流れる水素ガスの状態を把握するため、各種センサ85,86,87,88,89が接続されている。
質量流量計85は、ステーション配管81のうち蓄圧器91とプレクーラ96との間に設けられ、ステーション配管81を流れる水素ガスの単位時間当たりの質量、すなわち質量流量に対応した信号をステーションECU95に送信する。充填中における水素ガスの質量流量の値は、この質量流量計85の検出値に基づいてステーションECU95において取得される。
第1ステーション温度センサ89は、ステーション配管81のうち最も車両に近い部分である充填ノズル92に設けられ、この充填ノズル92における水素ガスの温度に対応した信号をステーションECU95に送信する。なお本実施形態では、充填ノズル92の位置でありかつ第1ステーション温度センサ89が設けられる位置を測定位置Q1と定義する。この測定位置Q1におけるガス温度の値は、この第1ステーション温度センサ89の検出値に基づいてステーションECU95において取得される。
第2ステーション温度センサ86は、ステーション配管81のうち上記測定位置Q1より上流側に定められた測定位置Q2に設けられる。より具体的には、第2ステーション温度センサ86は、ステーション配管81のうち継手部83とプレクーラ96との間に定められた測定位置Q2に設けられ、この測定位置Q2における水素ガスの温度に対応した信号をステーションECU95に送信する。この測定位置Q2におけるガス温度の値は、この第2ステーション温度センサ86の検出値に基づいてステーションECU95において取得される。また以下で説明するように、ステーションECU95では、測定位置Q1におけるガス温度の値を、これよりも上流側の測定位置Q2に設けられた第2ステーション温度センサ86の検出値に基づいて推定することも可能となっている。
ステーション圧力センサ87は、上記測定位置Q2に設けられ、この測定位置Q2における水素ガスの圧力に対応した信号をステーションECU95に送信する。外気温度センサ88は、外気の温度を検出し、検出値に対応した信号をステーションECU95に送信する。充填時における環境温度の値は、この外気温度センサ88の検出値に基づいてステーションECU95において取得される。
充填ノズル92には、車両Vと通信するための赤外線通信機98が設けられている。赤外線通信機98は、充填ノズル92をレセプタクル38に接続すると、車両Vに設けられた赤外線通信機5に対向し、これら通信機98,5間で赤外線を介したデータ信号の送受信が可能となる。
図2は、水素ステーション9の蓄圧器91と車両Vに搭載された水素タンク31とを、配管81,82で接続し、水素タンク31に水素ガスを充填するガス充填方法の具体的な手順を示すフローチャートである。図2に示すように、本実施形態に係るガス充填方法は、大まかには、始めに実行する初期充填制御と、初期充填制御の後に実行する本充填制御と、に分けられる。
始めにS1では、作業者は、水素ステーション9の充填ノズル92を車両Vのレセプタクル38に篏合させ、水素ステーション9の蓄圧器91と車両Vの水素タンク31とを、ステーション配管81、継手部83、外部ホース82、充填ノズル92、及び車両配管39を接続して構成される配管によって接続する。
次にS2では、ステーションECU95は、充填制御を実行するために必要な情報を取得する。より具体的には、ステーションECU95は、現在の環境温度の値Tambと、現在(充填開始直前)の水素タンク31内の圧力である初期圧の値Piniと、現在接続されている水素タンク31の容積の値Vtankと、を取得する。なお、環境温度の値Tambは、外気温度センサ88の検出値に基づいてステーションECU95において取得され、初期圧の値Pini及び容積の値Vtankは、車両Vと水素ステーション9との間の通信を介して車両Vから送信されるデータ信号に基づいてステーションECU95において取得される。
次にS3では、ステーションECU95は、予め定められた制御マップ群の中から、S2で取得した値Pini,Vtankに応じた一つの制御マップを選択する。この制御マップは、環境温度の値Tambと、後述の初期充填及び本充填において目標昇圧率を設定する際に用いられるモデル式を特徴付ける複数の係数(a,b,c,d)の値とを関連付けるものである。ステーションECU95の記憶媒体には、このような制御マップが、タンクの容積及びタンクの初期圧の組み合わせに応じて複数記憶されている。S3では、ステーションECU95は、S2で取得した値Pini,Vtankに応じた制御マップを選択する。
次にS4では、ステーションECU95は、充填を開始してから後述の切替時間tsw(具体的には、例えば30秒)が経過するまで、後に図5を参照して詳細に説明する初期充填制御を実行する。
次にS5では、ステーションECU95は、本充填制御を実行し、S6に移る。
図3は、本充填制御の具体的な手順を示すフローチャートである。
図3は、本充填制御の具体的な手順を示すフローチャートである。
S11では、ステーションECU95は、第1ステーション温度センサ89の検出値に基づいて測定位置Q1におけるガスの温度の値T1を取得し、この温度値T1に、下記式(1)で示すような質量流量値mを用いた質量平均処理を施すことにより、温度パラメータの値を算出する。以下の式において“i”及び“j”は制御ステップを示す整数とする。また以下の式では、制御ステップ“i”において取得される値を括弧書きで表記する。また下記式(1)において、“s”は、質量平均処理を開始する制御ステップを示す所定の整数である。なお以下では、以上のように第1ステーション温度センサ89の検出値に基づいて測定位置Q1におけるガス温度の値T1を取得し、さらにこの温度値T1を用いて下記式(1)に基づいて算出される温度パラメータの値を、温度パラメータのセンサベース値といい、以下では「MAT」と表記する。
S12では、ステーションECU95は、環境温度値Tambに基づいて先に選択した制御マップを検索することにより、係数の値(a,b,c,d)を決定し、さらにこれら係数値(a,b,c,d)とS11で算出した温度パラメータのセンサベース値MATとを下記式(2)に入力することにより、トータル充填時間の値tfinを算出する。ここでトータル充填時間とは、初期圧から充填を開始してから水素タンク31が満充填となり、充填を終了するまでにかかると予想される時間に相当する。
S13では、ステーションECU95は、S12において算出したトータル充填時間の値tfinに基づいて、これを実現するような目標昇圧率の値RRを算出する。
S14では、ステーションECU95は、測定位置Q2におけるガス圧の値Pを取得し、このガス圧値PにS13で算出した目標昇圧率の値RRを加算することにより、測定位置Q2におけるガス圧に対する目標値に相当する目標圧の値Ptrgを算出する(Ptrg=P+RR)。ここでガス圧値Pは、ステーション圧力センサ87の検出値に基づいてステーションECU95において取得される。
S15では、ステーションECU95は、算出した目標圧値Ptrgが実現されるように、ステーション圧力センサ87の検出値を用いた既知のフィードバック制御則に従って流量制御弁84の開度を調整し、S6に戻る。
図2に戻り、S6では、ステーションECU95は、現在の水素タンク31内のガス温度の値Tgasと、測定位置Q2におけるガス圧の値Pと、を取得し、これらガス温度値Tgas及びガス圧値Pに基づいて水素タンク31内の水素ガスの密度の値ρを算出する。ここでガス温度の値Tgasは、車両Vと水素ステーション9との間の通信を介して車両Vから送信されるデータ信号に基づいてステーションECU95において取得される。
S7では、ステーションECU95は、S6で算出した密度値ρが、予め定められた充填終了密度値ρendより高いか否かを判別する。S7の判別がNOである場合には、ステーションECU95は、S5に戻り本充填制御を継続して実行する。またS7の判別がYESである場合には、ステーションECU95は、水素タンク31は満充填に達したと判断し、図2の処理を終了する。
次に、図4及び図5を参照して、初期充填制御の具体的な手順について説明する。
図4は、充填開始直後における温度パラメータの変化を示す図である。図4において横軸は時間であり、縦軸は温度パラメータである。また図4には、時刻t0を充填開始時刻とし、温度パラメータのセンサベース値MATを破線で示す。また図4には、初期充填制御及び本充填制御で実行される充填制御において入力として用いられる温度パラメータの値の変化を太実線で示す。
図4は、充填開始直後における温度パラメータの変化を示す図である。図4において横軸は時間であり、縦軸は温度パラメータである。また図4には、時刻t0を充填開始時刻とし、温度パラメータのセンサベース値MATを破線で示す。また図4には、初期充填制御及び本充填制御で実行される充填制御において入力として用いられる温度パラメータの値の変化を太実線で示す。
時刻t0において充填を開始してから後述の切替時間tswが経過するまでの間は、以下で説明する初期充填制御が実行される。また時刻t2において切替時間tswが経過した後には、図3を参照して説明した本充填制御が実行される。またこの時刻t2以降の本充填制御では、上述のように図4において破線で示す温度パラメータのセンサベース値MATに基づく充填制御が実行される。
また図11を参照して説明したように、時刻t0において充填を開始してから数十秒が経過するまでの間では、第1ステーション温度センサ89の検出値は外気温からプレクーラ96による冷却温度まで急激に低下する。このため、図4において細実線で示すように、時刻t0から時刻t2までの間では、温度パラメータのセンサベース値MATも急激に低下する。そこで、時刻t0から時刻t2までの間における初期充填制御では、本充填制御と異なり温度パラメータのセンサベース値MATに基づいて充填制御を実行することができない。
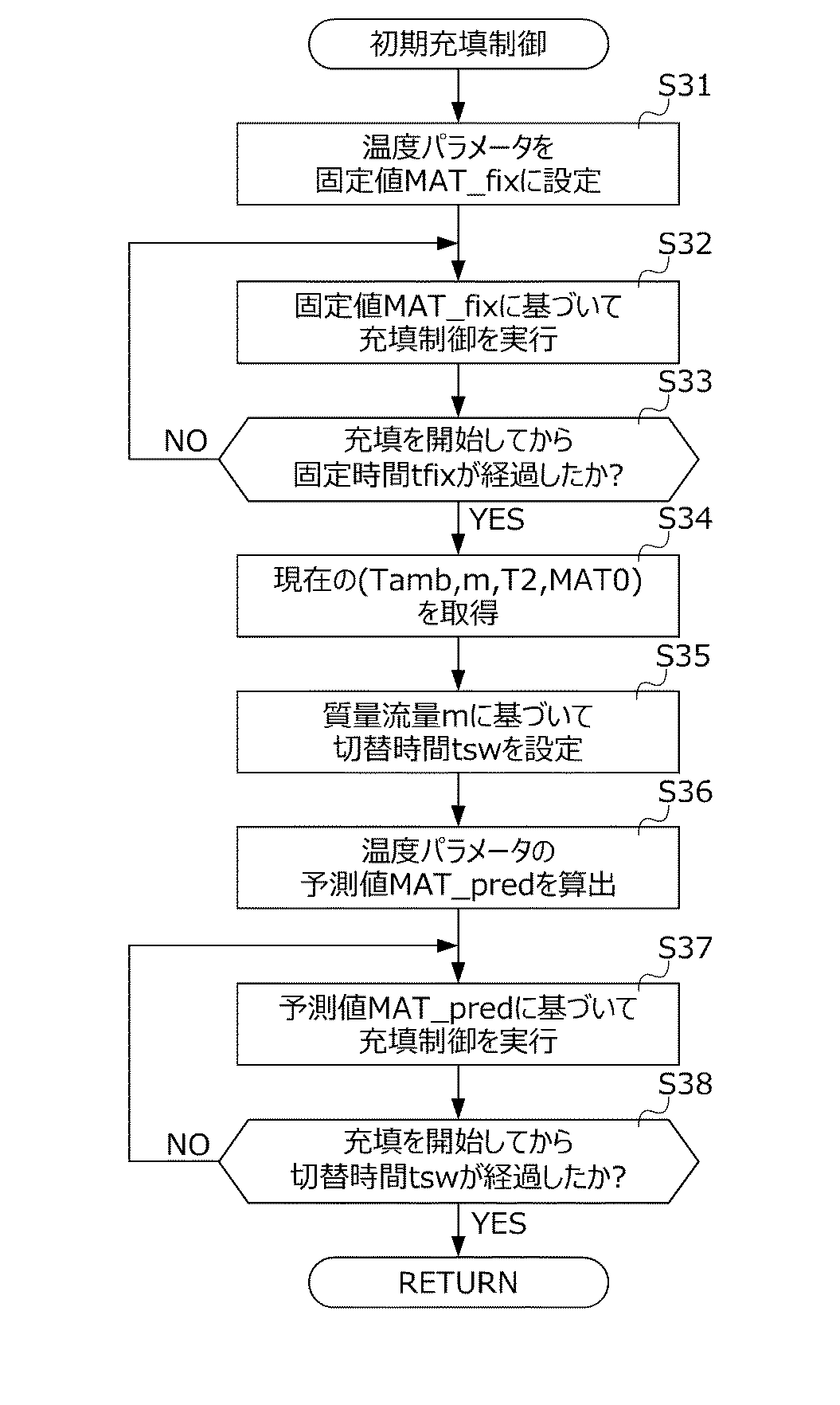
図5は、初期充填制御の具体的な手順を示すフローチャートである。
始めにS21では、ステーションECU95は、予め定められた固定値MAT_fixを温度パラメータの値として設定し、S22に移る。ここで固定値MAT_fixは、例えばプレクーラ96の冷却温度(具体的には、例えば−40℃)に設定される。なお図4には、この固定値MAT_fixを一点鎖線で示す。
始めにS21では、ステーションECU95は、予め定められた固定値MAT_fixを温度パラメータの値として設定し、S22に移る。ここで固定値MAT_fixは、例えばプレクーラ96の冷却温度(具体的には、例えば−40℃)に設定される。なお図4には、この固定値MAT_fixを一点鎖線で示す。
次にS22では、ステーションECU95は、S21で設定された温度パラメータの固定値MAT_fixに基づいて、充填制御を実行する。より具体的には、ステーションECU95は、温度パラメータの固定値MAT_fixを入力として、図3のS12〜S15と同様の充填制御を実行した後、S23に移る。
次にS23では、ステーションECU95は、充填を開始してから所定の固定時間tfix(具体的には、例えば15秒)が経過したか否かを判別する。S23の判別がNOである場合には、ステーションECU95は、S22に戻り、再び温度パラメータの固定値MAT_fixの下での充填制御を継続して実行する。またS23の判別がYESである場合、すなわち充填を開始してから固定時間tfixが経過した後である場合には、ステーションECU95は、S24に移る。
次にS24では、ステーションECU95は、現在の環境温度の値Tambと、現在の質量流量の値mと、現在の測定位置Q2におけるガス温度の値T2と、温度パラメータの初期値MAT0と、を取得する。ここで、環境温度の値Tambは、外気温度センサ88の検出値に基づいて、ステーションECU95において取得される。質量流量値mは、質量流量計85の検出値に基づいて、ステーションECU95において取得される。ガス温度の値T2は、測定位置Q2に設けられた第2ステーション温度センサ86の検出値に基づいて、ステーションECU95において取得される。また温度パラメータの初期値MAT0は、第1ステーション温度センサ89の検出値に基づいて現在の測定位置Q1におけるガスの温度の値T1を取得し、この温度値T1に上記式(1)と同様の質量平均処理を施すことによって算出された値が用いられる。なお図4には、この初期値MAT0を白丸印で示す。
次にS25では、ステーションECU95は、測定位置Q2から測定位置Q1までの間の熱容量の値Cと、環境温度の値Tambと、現在の質量流量の値mと、現在の測定位置Q2におけるガス温度の値T2と、温度パラメータの初期値MAT0と、に基づいて、温度パラメータの予測値MAT_predを算出する。ここで予測値MAT_predとは、現在(すなわち、充填を開始してから固定時間tfixが経過した時点)から予測時間(より具体的には、後述の切替時間tswから固定時間tfixを減じて得られる時間)後まで、水素ガスの充填を継続した場合における温度パラメータのセンサベース値MATに対する予測値に相当する。なお図4には、この予測値MAT_predを二点鎖線で示す。また熱容量値Cには、予め実験を行うことによって定められた値が用いられる。
次にS26では、ステーションECU95は、S25で設定された温度パラメータの予測値MAT_predに基づいて、充填制御を実行する。より具体的には、ステーションECU95は、温度パラメータの予測値MAT_predを入力として、図3のS12〜S15と同様の充填制御を実行した後、S27に移る。
次にS27では、ステーションECU95は、充填を開始してから上記固定時間tfixよりも長く設定された切替時間tsw(具体的には、例えば30秒)が経過したか否かを判別する。S27の判別がNOである場合には、ステーションECU95は、S26に戻り、再び温度パラメータの予測値MAT_predの下での充填制御を継続して実行する。またS27の判別がYESである場合、すなわち充填を開始してから切替時間tswが経過した後である場合には、ステーションECU95は、図5の初期充填制御を終了し、図2のS5の本充填制御を開始する。
本実施形態に係るガス充填方法によれば、以下の効果(1)〜(2)を奏する。
(1)ガス充填方法では、測定位置Q1において定義される温度パラメータに基づいて初期充填制御及び本充填制御を行う。初期充填制御では、環境温度と質量流量と測定位置Q1よりも上流側の測定位置Q2におけるガス温度の値を取得し、測定位置Q1から測定位置Q2までの熱容量の値Cと、環境温度の値Tambと、質量流量の値mと、ガス温度の値T2と、温度パラメータの初期値MAT0と、に基づいて、現在から予測時間後までガスの充填を継続した場合における予測時間後の温度パラメータの予測値MAT_predを算出し、さらにこの予測値MAT_predに基づいて初期充填制御を行う。これにより、例えば充填開始直後であって現在から予測時間後までの間において、測定位置Q2よりもプレクーラ96からの距離が遠い測定位置Q1に設けられる第1ステーション温度センサ89を用いて直接的に温度パラメータの値を算出することができない場合であっても、現在から予測時間後における温度パラメータの予測値MAT_predを算出し、この予測値MAT_predに基づいて初期充填制御を行うことができる。したがって例えば予測時間後に、第1ステーション温度センサ89を用いて直接的に温度パラメータの値MATを算出できる状態になったことに応じて、予測値MAT_predを用いた初期充填制御からセンサベース値MATを用いた本充填制御に切り替えた場合であっても、これら2つの値MAT_pred,MATのギャップを小さくできるので(図4参照)、充填開始直後における水素タンクの不要な過熱を抑制することができる。
(1)ガス充填方法では、測定位置Q1において定義される温度パラメータに基づいて初期充填制御及び本充填制御を行う。初期充填制御では、環境温度と質量流量と測定位置Q1よりも上流側の測定位置Q2におけるガス温度の値を取得し、測定位置Q1から測定位置Q2までの熱容量の値Cと、環境温度の値Tambと、質量流量の値mと、ガス温度の値T2と、温度パラメータの初期値MAT0と、に基づいて、現在から予測時間後までガスの充填を継続した場合における予測時間後の温度パラメータの予測値MAT_predを算出し、さらにこの予測値MAT_predに基づいて初期充填制御を行う。これにより、例えば充填開始直後であって現在から予測時間後までの間において、測定位置Q2よりもプレクーラ96からの距離が遠い測定位置Q1に設けられる第1ステーション温度センサ89を用いて直接的に温度パラメータの値を算出することができない場合であっても、現在から予測時間後における温度パラメータの予測値MAT_predを算出し、この予測値MAT_predに基づいて初期充填制御を行うことができる。したがって例えば予測時間後に、第1ステーション温度センサ89を用いて直接的に温度パラメータの値MATを算出できる状態になったことに応じて、予測値MAT_predを用いた初期充填制御からセンサベース値MATを用いた本充填制御に切り替えた場合であっても、これら2つの値MAT_pred,MATのギャップを小さくできるので(図4参照)、充填開始直後における水素タンクの不要な過熱を抑制することができる。
(2)ガス充填方法では、充填を開始してから予測時間が経過し、初期充填制御が終わった後は、測定位置Q1に設けられた第1ステーション温度センサ89の検出値に基づいて算出された温度パラメータのセンサベース値MATを用いて本充填制御を行う。ガス充填方法では、温度パラメータの定義に用いられる測定位置Q1を、ガス流路のうち燃料電池車両Vに最も近い充填ノズル92の位置とする。従ってガス充填方法によれば、予測時間が経過した後は、充填ノズル92に設けた第1ステーション温度センサ89の検出値を用いて算出した温度パラメータのセンサベース値MATに基づいて、水素タンク31に供給されるガスの実際の温度に応じた温度パラメータの下で充填制御を行うことができる。
なお上記実施形態では、測定位置Q1を充填ノズル92に定め、この測定位置Q1に第1ステーション温度センサ89を設けた場合について説明したが、本発明はこれに限らない。測定位置Q1は、充填ノズル92と継手部83との間に定めてもよい。また上記実施形態では、測定位置Q2を継手部83とプレクーラ96との間に定め、この測定位置Q2に第2ステーション温度センサ86を設けた場合について説明したが、本発明はこれに限らない。測定位置Q2は、測定位置Q1よりも上流側であれば、継手部83に定めてもよいし、プレクーラ96に定めてもよい。また上記実施形態では、第1ステーション温度センサ89及び第2ステーション温度センサ86は、水素ガスの温度を直接検出する場合について説明したが、本発明はこれに限らない。第1ステーション温度センサ89及び第2ステーション温度センサ86では、ガスの温度を直接検出せずに、ガスの温度と相関のある部分の温度(例えば、ガスが通流する配管の温度や、プレクーラ96においてガスを冷却する冷媒の温度)を検出してもよい。
<第2実施形態>
次に、本発明の第2実施形態について、図面を参照しながら説明する。
本実施形態に係るガス充填方法は、初期充填制御の具体的な手順が第1実施形態に係るガス充填方法と異なる。また本実施形態に係るガス充填方法を実行するための水素充填システムの具体的な構成は、第1実施形態に係る水素充填システムSと同じであるので、詳細な説明を省略する。
次に、本発明の第2実施形態について、図面を参照しながら説明する。
本実施形態に係るガス充填方法は、初期充填制御の具体的な手順が第1実施形態に係るガス充填方法と異なる。また本実施形態に係るガス充填方法を実行するための水素充填システムの具体的な構成は、第1実施形態に係る水素充填システムSと同じであるので、詳細な説明を省略する。
図6は、本実施形態に係る初期充填制御の具体的な手順を示すフローチャートである。第1実施形態に係る初期充填制御では、初期充填制御を終了し本充填制御を開始する時間に相当する切替時間tswを固定値とした。これに対し本実施形態に係る初期充填制御では、切替時間tswを可変とする点において、第1実施形態に係る初期充填制御と異なる。なお、図6のフローチャートにおいて、S31〜S34の処理は、図5のフローチャートにおけるS21〜S24の処理と同じであるので、詳細な説明を省略する。
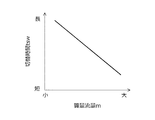
S35では、ステーションECU95は、S34において取得した質量流量の値mに基づいて切替時間tswを設定する。より具体的には、ステーションECU95は、質量流量の値mに基づいて図7に示すようなマップを検索することによって切替時間tswを設定する。図7に示すように、ステーションECU95は、質量流量の値mが小さくなるほど、切替時間tswを長くする。これは、水素ガスの質量流量が少なくなるほど、配管のヒートマスによる影響が大きくなり、水素ガスの温度が下がりにくくなってしまい、ひいて初期充填制御の実行中における水素タンク31の過熱のリスクが上昇すると考えられるためである。
図6に戻り、S36では、ステーションECU95は、熱容量の値Cと、環境温度の値Tambと、現在の質量流量の値mと、現在の測定位置Q2におけるガス温度の値T2と、温度パラメータの初期値MAT0と、に基づいて、現在(すなわち、充填を開始してから固定時間tfixが経過した時点)から予測時間(より具体的には、S35で設定した切替時間tswから固定時間tfixを減じて得られる時間)後まで、水素ガスの充填を継続した場合における温度パラメータの予測値MAT_predを算出する。
なお、図6のフローチャートにおいてS37〜S38の処理は、図5のフローチャートにおけるS26〜S27の処理と同じであるので、詳細な説明を省略する。
本実施形態に係るガス充填方法によれば、上記効果(1)〜(2)に加え、以下の効果(3)を奏する。
(3)ガス充填方法では、充填を開始してから切替時間tswが経過するまでは測定位置Q2に設けられた第2ステーション温度センサ86の検出値に基づいて算出した温度パラメータの予測値MAT_predに基づいて初期充填制御を行い、切替時間tswが経過した後は、測定位置Q1に設けられた第1ステーション温度センサ89の検出値に基づいて算出された温度パラメータのセンサベース値MATを用いて本充填制御を行う。またガス充填方法では、質量流量の値mに応じて切替時間tswを変更することにより、初期充填制御から本充填制御に切り替えるタイミングを、実際の充填の状態に応じて決定することができる。
(3)ガス充填方法では、充填を開始してから切替時間tswが経過するまでは測定位置Q2に設けられた第2ステーション温度センサ86の検出値に基づいて算出した温度パラメータの予測値MAT_predに基づいて初期充填制御を行い、切替時間tswが経過した後は、測定位置Q1に設けられた第1ステーション温度センサ89の検出値に基づいて算出された温度パラメータのセンサベース値MATを用いて本充填制御を行う。またガス充填方法では、質量流量の値mに応じて切替時間tswを変更することにより、初期充填制御から本充填制御に切り替えるタイミングを、実際の充填の状態に応じて決定することができる。
また水素ガスの質量流量が少なくなると、配管のヒートマスによる影響が大きくなるため、水素ガスの温度が下がりにくくなってしまい、水素タンクの過熱のリスクが上昇すると考えられる。そこでガス充填方法では、質量流量の値mが小さくなるほど切替時間tswを長くし、充填制御を切り替えるタイミングを遅くする。これにより、実際の充填の状態に応じた適切なタイミングで充填制御を切り替えることができる。
<第3実施形態>
次に、本発明の第3実施形態について、図面を参照しながら説明する。
本実施形態に係るガス充填方法は、初期充填制御の具体的な手順が第1実施形態に係るガス充填方法と異なる。また本実施形態に係るガス充填方法を実行するための水素充填システムの具体的な構成は、第1実施形態に係る水素充填システムSと同じであるので、詳細な説明を省略する。
次に、本発明の第3実施形態について、図面を参照しながら説明する。
本実施形態に係るガス充填方法は、初期充填制御の具体的な手順が第1実施形態に係るガス充填方法と異なる。また本実施形態に係るガス充填方法を実行するための水素充填システムの具体的な構成は、第1実施形態に係る水素充填システムSと同じであるので、詳細な説明を省略する。
図8は、本実施形態に係る初期充填制御の具体的な手順を示すフローチャートである。第1実施形態に係る初期充填制御では、充填を開始してから切替時間tswが経過するまでの間において、温度パラメータの予測値MAT_predを算出する機会は1回のみとした。これに対し本実施形態に係る初期充填制御では、充填を開始してから切替時間tswが経過するまでの間において、温度パラメータの予測値を算出する機会を複数回設けている点において、第1実施形態に係る初期充填制御と異なる。なお、図8のフローチャートにおいて、S41〜S43の処理は、図5のフローチャートにおけるS21〜S23の処理と同じであるので、詳細な説明を省略する。
図9は、充填開始直後における温度パラメータの変化を示す図である。図9において横軸は時間であり、縦軸は温度パラメータである。また図9には、時刻t10を充填開始時刻とし、温度パラメータのセンサベース値MATを破線で示す。また図9には、初期充填制御及び本充填制御で実行される充填制御において入力として用いられる温度パラメータの値の変化を太実線で示す。
先ずS44では、ステーションECU95は、固定時間tfixと切替時間tswとの間に中間予測時間tintを設定する(tfix<tint<tsw)。
S45では、ステーションECU95は、現在の環境温度の値Tambと、現在の質量流量の値mと、現在の測定位置Q2におけるガス温度の値T2と、温度パラメータの初期値MAT0と、を取得する。なお図9では、S45で取得される初期値MAT0を白丸印で示す。
次にS46では、ステーションECU95は、熱容量の値Cと、環境温度の値Tambと、現在の質量流量の値mと、現在の測定位置Q2におけるガス温度の値T2と、温度パラメータの初期値MAT0とに基づいて、温度パラメータの予測値MAT_pred1を算出する。ここで予測値MAT_pred1とは、現在(すなわち、充填を開始してから固定時間tfixが経過した時点、すなわち図9における時刻t11)から予測時間(より具体的には、中間予測時間tintから固定時間tfixを減じて得られる時間)後まで、水素ガスの充填を継続した場合における温度パラメータのセンサベース値MATに対する予測値に相当する。なお図9には、この予測値MAT_pred1を二点鎖線で示す。
次にS47では、ステーションECU95は、S46で設定された温度パラメータの予測値MAT_pred1に基づいて、充填制御を実行する。より具体的には、ステーションECU95は、温度パラメータの予測値MAT_pred1を入力として、図3のS12〜S15と同様の充填制御を実行した後、S48に移る。
次にS48では、ステーションECU95は、充填を開始してから上記中間予測時間tintが経過したか否かを判別する。S48の判別がNOである場合には、ステーションECU95は、S47に戻り、再び温度パラメータの予測値MAT_pred1の下での充填制御を継続して実行する。またS48の判別がYESである場合、すなわち充填を開始してから中間予測時間tintが経過した後(図9における時刻t12以降)である場合には、ステーションECU95は、S49に移る。
次にS49では、ステーションECU95は、現在の環境温度の値Tambと、現在の質量流量の値mと、現在の測定位置Q2におけるガス温度の値T2と、温度パラメータの初期値MAT0と、を取得する。なお図9では、S49で取得される初期値MAT0を黒丸印で示す。
次にS50では、ステーションECU95は、熱容量の値Cと、環境温度の値Tambと、現在の質量流量の値mと、現在の測定位置Q2におけるガス温度の値T2と、温度パラメータの初期値MAT0と、に基づいて、温度パラメータの予測値MAT_pred2を算出する。ここで予測値MAT_pred2とは、現在(すなわち、充填を開始してから中間予測時間tintが経過した時点)から予測時間(より具体的には、切替時間tswから中間予測時間tintを減じて得られる時間)後まで、水素ガスの充填を継続した場合における温度パラメータのセンサベース値MATに対する予測値に相当する。なお図9には、この予測値MAT_pred2を二点鎖線で示す。
次にS51では、ステーションECU95は、S50で設定された温度パラメータの予測値MAT_pred2に基づいて、充填制御を実行する。より具体的には、ステーションECU95は、温度パラメータの予測値MAT_pred2を入力として、図3のS12〜S15と同様の充填制御を実行した後、S52に移る。
次にS52では、ステーションECU95は、充填を開始してから切替時間tswが経過したか否かを判別する。S52の判別がNOである場合には、ステーションECU95は、S51に戻り、再び温度パラメータの予測値MAT_pred2の下での充填制御を継続して実行する。またS52の判別がYESである場合、すなわち充填を開始してから切替時間tswが経過した後(すなわち、図9における時刻t13以降)である場合には、ステーションECU95は、図8の初期充填制御を終了し、図2のS5の本充填制御を開始する。
なお、本実施形態では、充填を開始してから切替時間tswが経過するまでの間に、温度パラメータの予測値を算出する機会を2回設けた場合について説明したが、本発明はこれに限らない。温度パラメータの予測値を算出する機会は、3回以上設けてもよい。
本実施形態に係るガス充填方法によれば、上記効果(1)〜(2)に加え、以下の効果(4)を奏する。
(4)ガス充填方法では、充填を開始してから切替時間tswが経過するまでの間に、温度パラメータの予測値を算出する機会を2回設ける。これにより、温度パラメータの予測値を段階的に適切な値に近づけることができるので、充填開始直後における水素タンク31の過熱をさらに抑制できる。
(4)ガス充填方法では、充填を開始してから切替時間tswが経過するまでの間に、温度パラメータの予測値を算出する機会を2回設ける。これにより、温度パラメータの予測値を段階的に適切な値に近づけることができるので、充填開始直後における水素タンク31の過熱をさらに抑制できる。
<第4実施形態>
次に、本発明の第4実施形態について、図面を参照しながら説明する。
本実施形態に係るガス充填方法は、充填制御を行う際に用いる温度センサの位置が第1実施形態に係るガス充填方法と異なる。
次に、本発明の第4実施形態について、図面を参照しながら説明する。
本実施形態に係るガス充填方法は、充填制御を行う際に用いる温度センサの位置が第1実施形態に係るガス充填方法と異なる。
図10は、本実施形態に係るガス充填方法が適用される水素充填システムSAの構成を示す図である。なお以下の水素充填システムSAの説明において、第1実施形態に係る水素充填システムSと同じ構成については同じ符号を付し、その詳細な説明を省略する。上述のように水素充填システムSAは、ステーション9Aの構成が第1実施形態に係る水素充填システムSと異なる。より具体的には、第1ステーション温度センサ89A及び第2ステーション温度センサ86Aを設ける位置が異なる。
第1ステーション温度センサ89Aは、ステーション配管81のうち継手部83又は継手部83とプレクーラ96との間に定められた測定位置Q1´に設けられる。なお図10には、第1ステーション温度センサ89Aを継手部83とプレクーラ96との間のうち継手部83の近傍に設けた場合について説明するが、本発明はこれに限らない。第1ステーション温度センサ89Aは、この測定位置Q1´における水素ガスの温度に対応した信号をステーションECU95Aに送信する。測定位置Q1´におけるガス温度の値は、この第1ステーション温度センサ89Aの検出値に基づいてステーションECU95Aにおいて取得される。
第2ステーション温度センサ86Aは、ステーション配管81のうち上記測定位置Q1´より上流側に定められた測定位置Q2´に設けられる。より具体的には、第2ステーション温度センサ86Aは、ステーション配管81のうちプレクーラ96又は測定位置Q1´とプレクーラ96との間に定められた測定位置Q2´に設けられ、この測定位置Q2´における水素ガスの温度に対応した信号をステーションECU95Aに送信する。なお図10には、第2ステーション温度センサ86Aを測定位置Q´とプレクーラ96との間のうちプレクーラ96の近傍に設けた場合について説明するが、本発明はこれに限らない。測定位置Q2´におけるガスの温度の値は、この第2ステーション温度センサ86Aの検出値に基づいてステーションECU95Aにおいて取得される。また以下で説明するように、ステーションECU95Aでは、測定位置Q1´におけるガス温度の値を、これよりも上流側の測定位置Q2´に設けられた第2ステーション温度センサ86Aの検出値に基づいて推定することも可能となっている。
本実施形態に係るガス充填方法は、上述のように第1ステーション温度センサ89Aが設けられる測定位置Q1´の位置、及び第2ステーション温度センサ86Aが設けられる測定位置Q2´の位置のみが第1実施形態に係るガス充填方法と異なり、本充填制御や初期充填制御の具体的な手順は第1実施形態と同じであるので、ガス充填方法の具体的な手順の説明は省略する。
本実施形態に係るガス充填方法によれば、上記効果(1)〜(2)に加え、以下の効果(4)を奏する。
(4)ガス充填方法では、温度パラメータの定義に用いられる測定位置Q1´を、ガス流路のうち継手部83とプレクーラ96との間に定める。従来から流通しているステーションは、継手部83とプレクーラ96との間に温度センサを設けたものが多い。従って測定位置Q1´をこのような位置に設定することにより、従来から存在するステーションに小さな設備変更を加えるだけで上記ガス充填方法を適用できる。
(4)ガス充填方法では、温度パラメータの定義に用いられる測定位置Q1´を、ガス流路のうち継手部83とプレクーラ96との間に定める。従来から流通しているステーションは、継手部83とプレクーラ96との間に温度センサを設けたものが多い。従って測定位置Q1´をこのような位置に設定することにより、従来から存在するステーションに小さな設備変更を加えるだけで上記ガス充填方法を適用できる。
以上、本発明の実施形態について説明したが、本発明はこれに限らない。本発明の趣旨の範囲内で、細部の構成を適宜変更してもよい。
S,SA…水素充填システム
V…燃料電池車両(移動体)
31…水素タンク(タンク)
9,9A…水素ステーション
81…ステーション配管(ガス流路、第1配管)
82…外部ホース(ガス流路、第2配管)
83…継手部(ガス流路、継手部)
84…流量制御弁(流量調整装置)
85…質量流量計
86,86A…第2ステーション温度センサ
89,89A…第1ステーション温度センサ
91…蓄圧器(供給源)
92…充填ノズル(ノズル部)
96…プレクーラ(冷却装置)
Q1,Q1´…測定位置(第1所定位置)
Q2,Q2´…測定位置(第2所定位置)
V…燃料電池車両(移動体)
31…水素タンク(タンク)
9,9A…水素ステーション
81…ステーション配管(ガス流路、第1配管)
82…外部ホース(ガス流路、第2配管)
83…継手部(ガス流路、継手部)
84…流量制御弁(流量調整装置)
85…質量流量計
86,86A…第2ステーション温度センサ
89,89A…第1ステーション温度センサ
91…蓄圧器(供給源)
92…充填ノズル(ノズル部)
96…プレクーラ(冷却装置)
Q1,Q1´…測定位置(第1所定位置)
Q2,Q2´…測定位置(第2所定位置)
Claims (6)
- ガスの供給源と移動体のタンクとを冷却装置及び流量調整装置が設けられたガス流路で接続し、前記ガス流路の第1所定位置における温度パラメータに基づいて充填制御を行うガス充填方法であって、
環境温度、前記ガス流路を流れるガスの質量流量、及び前記ガス流路のうち前記第1所定位置より上流側の第2所定位置におけるガスの温度又はガスと相関のある温度の値を取得する工程と、
前記第1所定位置から前記第2所定位置までの熱容量と、前記環境温度の取得値と、前記質量流量の取得値と、前記温度の取得値とに基づいて、現在から予測時間後までガスの充填を継続した場合における前記予測時間後の前記温度パラメータの値を予測する工程と、を備え、
前記温度パラメータの予測値に基づいて充填制御を行うことを特徴とするガス充填方法。 - 前記予測時間が経過した後、前記第1所定位置に設けられた第1ガス温度センサの検出値と前記質量流量の取得値とに基づいて前記温度パラメータの値を算出する工程と、をさらに備え、
前記予測時間が経過するまでは前記温度パラメータの予測値に基づいて充填制御を行い、前記予測時間が経過した後は前記温度パラメータの算出値に基づいて充填制御を行い、
前記予測時間は、前記質量流量の取得値に応じて変更することを特徴とする請求項1に記載のガス充填方法。 - 前記質量流量の取得値が所定値より小さい場合には、前記質量流量の取得値が前記所定値より大きい場合よりも前記予測時間を長くすることを特徴とする請求項2に記載のガス充填方法。
- ガスの供給源と移動体のタンクとを冷却装置及び流量調整装置が設けられたガス流路で接続し、前記ガス流路の第1所定位置における温度パラメータに基づいて充填制御を行うガス充填方法であって、
環境温度、前記ガス流路を流れるガスの質量流量、及び前記ガス流路のうち前記第1所定位置より上流側の第2所定位置におけるガスの温度又はガスと相関のある温度の値を取得する第1工程と、
前記第1所定位置から前記第2所定位置までの熱容量と、前記環境温度の取得値と、前記質量流量の取得値と、前記温度の取得値とに基づいて、現在から将来の予測時刻までガスの充填を継続した場合における前記予測時刻における前記温度パラメータの値を予測する第2工程と、
現在から所定時間にわたり前記温度パラメータの予測値に基づいて充填制御を行う第3工程と、
前記予測時刻になるまでの間に前記第1〜第3工程を2回以上繰り返し実行することを特徴とするガス充填方法。 - 前記ガス流路は、前記供給源から延びる第1配管と、前記移動体のレセプタクルに接続されるノズル部から延びる第2配管と、前記第1配管と前記第2配管とを接続する継手部とを備え、
前記第1配管には前記冷却装置が設けられ、
前記第1所定位置は、前記ノズル部又は当該ノズル部と前記継手部との間に定められ、前記第2所定位置は、前記継手部、前記冷却装置、又は前記継手部と前記冷却装置との間に定められることを特徴とする請求項1から4の何れかに記載のガス充填方法。 - 前記ガス流路は、前記供給源から延びる第1配管と、前記移動体のレセプタクルに接続されるノズル部から延びる第2配管と、前記第1配管と前記第2配管とを接続する継手部とを備え、
前記第1配管には前記冷却装置が設けられ、
前記第1所定位置は、前記継手部又は当該継手部と前記冷却装置との間に定められ、前記第2所定位置は、前記冷却装置又は前記第1所定位置と前記冷却装置との間に定められることを特徴とする請求項1から4の何れかに記載のガス充填方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017224596A JP6602829B2 (ja) | 2017-11-22 | 2017-11-22 | ガス充填方法 |
| DE102018219835.7A DE102018219835B4 (de) | 2017-11-22 | 2018-11-20 | Gasbetankungsverfahren |
| CN201811394749.3A CN109812695B (zh) | 2017-11-22 | 2018-11-21 | 气体填充方法 |
| US16/197,671 US11136951B2 (en) | 2017-11-22 | 2018-11-21 | Gas fueling method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017224596A JP6602829B2 (ja) | 2017-11-22 | 2017-11-22 | ガス充填方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019094972A JP2019094972A (ja) | 2019-06-20 |
| JP6602829B2 true JP6602829B2 (ja) | 2019-11-06 |
Family
ID=66336647
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017224596A Active JP6602829B2 (ja) | 2017-11-22 | 2017-11-22 | ガス充填方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11136951B2 (ja) |
| JP (1) | JP6602829B2 (ja) |
| CN (1) | CN109812695B (ja) |
| DE (1) | DE102018219835B4 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020227550A1 (en) * | 2019-05-08 | 2020-11-12 | The Texas A&M University System | Smart hydrogen storage protocol |
| CN110848566B (zh) * | 2019-12-13 | 2024-04-05 | 上海机动车检测认证技术研究中心有限公司 | 一种加氢装置及加氢方法 |
| DE102021201213A1 (de) | 2021-02-09 | 2022-08-11 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Betankung eines Verkehrsmittels durch eine Wasserstoff-Betankungseinrichtung |
| DE102021201210A1 (de) | 2021-02-09 | 2022-08-11 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Betankung eines Verkehrsmittels durch eine Wasserstoff-Betankungseinrichtung |
| DE102021201594A1 (de) | 2021-02-19 | 2022-08-25 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Betankung eines Verkehrsmittels durch eine Wasserstoff-Betankungs-einrichtung |
| DE102021203385A1 (de) | 2021-04-06 | 2022-10-06 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Betankung eines Verkehrsmittels durch eine Wasserstoff-Betankungseinrichtung |
| KR102433990B1 (ko) * | 2021-07-27 | 2022-08-19 | (주)제아이엔지 | 수소차 예측 대응 수소충전소 운영 관리 시스템 |
| DE102021120035A1 (de) | 2021-08-02 | 2023-02-02 | E.On Se | Manipulationsgeschützte Gasabgabevorrichtung |
| JP2023035678A (ja) * | 2021-09-01 | 2023-03-13 | スズキ株式会社 | 水素補給制御装置、水素補給装置及び水素補給プログラム |
| JP7582926B2 (ja) * | 2021-10-18 | 2024-11-13 | 本田技研工業株式会社 | 水素充填装置の制御方法、及び、水素充填装置 |
| US20240326655A1 (en) * | 2023-03-29 | 2024-10-03 | Fca Us Llc | Techniques for managing and maintaining systemic efficiency during hydrogen refueling for fuel cell electric vehicles |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002241772A (ja) * | 2001-02-20 | 2002-08-28 | Denaro:Kk | ガソリンスタンド |
| KR20050058416A (ko) * | 2002-09-25 | 2005-06-16 | 다이요 닛산 가부시키가이샤 | 연료 충전 장치 및 방법 |
| JP2009127853A (ja) | 2007-11-28 | 2009-06-11 | Toyota Motor Corp | 燃料ガス補給システム及び燃料ガス補給方法 |
| DE102009016475B4 (de) * | 2008-04-01 | 2012-02-02 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Wasserstoffbereitstellungssystem und Verfahren zur Bereitstellung von Wasserstoff |
| JP5525188B2 (ja) * | 2009-06-09 | 2014-06-18 | 本田技研工業株式会社 | 水素充填装置及び水素充填方法 |
| CN102282410B (zh) * | 2009-07-29 | 2013-11-13 | 丰田自动车株式会社 | 气体填充系统 |
| JP5474436B2 (ja) * | 2009-07-30 | 2014-04-16 | トヨタ自動車株式会社 | ガス充填システム |
| JP5489573B2 (ja) * | 2009-07-30 | 2014-05-14 | トヨタ自動車株式会社 | ガス充填システム及びガス充填装置 |
| WO2011048621A1 (ja) * | 2009-10-19 | 2011-04-28 | トヨタ自動車株式会社 | ガス充填装置、ガス充填システム、ガス充填方法及び移動装置 |
| NO332687B1 (no) * | 2009-10-21 | 2012-12-10 | Nel Hydrogen As | Fremgangsmate for operasjonen og styring ved gassfylling |
| JP5328617B2 (ja) * | 2009-11-18 | 2013-10-30 | トヨタ自動車株式会社 | ガス充填システム、ガス充填方法、車両 |
| JP5261408B2 (ja) * | 2010-01-25 | 2013-08-14 | トヨタ自動車株式会社 | 燃料ガスステーション、燃料ガス充填システム、燃料ガス供給方法 |
| US9347614B2 (en) * | 2010-04-21 | 2016-05-24 | Honda Motor Co., Ltd. | Method and system for tank refilling using active fueling speed control |
| JP5707727B2 (ja) * | 2010-04-23 | 2015-04-30 | トヨタ自動車株式会社 | ガス充填方法、ガス充填システム、ガスステーション及び移動体 |
| DE112010004075B4 (de) * | 2010-05-12 | 2015-07-02 | Toyota Jidosha Kabushiki Kaisha | Brennstoffzellensystem, Verfahren zu dessen Versorgung mit Brenngas, und mobiler Körper |
| JP5746962B2 (ja) * | 2011-12-20 | 2015-07-08 | 株式会社神戸製鋼所 | ガス供給方法およびガス供給装置 |
| US20140377678A1 (en) * | 2012-01-23 | 2014-12-25 | Jx Nippon Oil & Energy Corporation | Fuel supply system, fuel cell system, and method for running each |
| JP6001315B2 (ja) * | 2012-04-26 | 2016-10-05 | トヨタ自動車株式会社 | ガス充填システム及び車両 |
| US9279541B2 (en) * | 2013-04-22 | 2016-03-08 | Air Products And Chemicals, Inc. | Method and system for temperature-controlled gas dispensing |
| GB2516959B (en) * | 2013-08-08 | 2018-01-10 | Intelligent Energy Ltd | Gas filling apparatus and method |
| JP2015105709A (ja) * | 2013-11-29 | 2015-06-08 | 株式会社神戸製鋼所 | ガス充填装置及びガス充填方法 |
| JP5901608B2 (ja) * | 2013-12-26 | 2016-04-13 | 本田技研工業株式会社 | 燃料充填システム |
| JP6001600B2 (ja) * | 2014-06-26 | 2016-10-05 | 株式会社日本自動車部品総合研究所 | ガス供給部を制御するシステムおよびガス充填方法 |
| JP6150839B2 (ja) * | 2015-04-14 | 2017-06-21 | 本田技研工業株式会社 | 燃料充填システム及びその燃料充填方法 |
| JP6198869B2 (ja) * | 2016-02-15 | 2017-09-20 | 本田技研工業株式会社 | 燃料電池システム及び燃料電池システムの制御方法 |
| CN107342205B (zh) | 2016-05-03 | 2019-07-23 | 睿励科学仪器(上海)有限公司 | 一种带电粒子探测装置 |
-
2017
- 2017-11-22 JP JP2017224596A patent/JP6602829B2/ja active Active
-
2018
- 2018-11-20 DE DE102018219835.7A patent/DE102018219835B4/de active Active
- 2018-11-21 US US16/197,671 patent/US11136951B2/en active Active
- 2018-11-21 CN CN201811394749.3A patent/CN109812695B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE102018219835B4 (de) | 2024-06-06 |
| US11136951B2 (en) | 2021-10-05 |
| CN109812695A (zh) | 2019-05-28 |
| JP2019094972A (ja) | 2019-06-20 |
| US20190153985A1 (en) | 2019-05-23 |
| DE102018219835A1 (de) | 2019-05-23 |
| CN109812695B (zh) | 2021-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6602829B2 (ja) | ガス充填方法 | |
| US11193632B2 (en) | Gas filling method | |
| JP6150839B2 (ja) | 燃料充填システム及びその燃料充填方法 | |
| JP6587737B2 (ja) | ガス充填方法 | |
| JP5901608B2 (ja) | 燃料充填システム | |
| JP6514611B2 (ja) | ガス充填方法 | |
| JP2019178758A (ja) | ガス充填方法 | |
| US10443784B2 (en) | System for controlling gas supply unit | |
| JP5115565B2 (ja) | 車両 | |
| JP5328617B2 (ja) | ガス充填システム、ガス充填方法、車両 | |
| US10995913B2 (en) | Vehicle and method for filling fuel gas | |
| JP2020115715A (ja) | 車両および車両の制御方法 | |
| JP2013527390A (ja) | ガス補給方法、水素ガス補給ステーションの操作方法 | |
| JP2011017406A (ja) | 水素充填システム、水素充填方法、移動体、および水素充填装置 | |
| JP2015233366A (ja) | 車両の電源装置 | |
| JP2023550394A (ja) | 実時間対応水素充填プロセスを実行する方法及びその装置 | |
| CN115992932B (zh) | 氢填充装置的控制方法和氢填充装置 | |
| JP7234892B2 (ja) | 充電制御装置 | |
| JP2015169262A (ja) | 燃料ガス充填システム、制御装置、燃料ガス充填方法、制御方法及びコンピュータプログラム | |
| JP2015045352A (ja) | 燃料ガス充填装置 | |
| CN106415110A (zh) | 用于压力箱的监视装置以及压力箱 | |
| JP6561746B2 (ja) | ガス充填システム | |
| WO2014162746A1 (ja) | 発電システムおよび発電システムの制御方法ならびに燃料電池 | |
| JP5299855B2 (ja) | 車両 | |
| US8575788B2 (en) | Method of operating a thermoelectric generator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180727 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190910 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191009 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6602829 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |