JP6573082B2 - 車両のロール制御装置 - Google Patents
車両のロール制御装置 Download PDFInfo
- Publication number
- JP6573082B2 JP6573082B2 JP2017073490A JP2017073490A JP6573082B2 JP 6573082 B2 JP6573082 B2 JP 6573082B2 JP 2017073490 A JP2017073490 A JP 2017073490A JP 2017073490 A JP2017073490 A JP 2017073490A JP 6573082 B2 JP6573082 B2 JP 6573082B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel side
- roll
- front wheel
- rear wheel
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000003381 stabilizer Substances 0.000 claims description 195
- 238000011156 evaluation Methods 0.000 claims description 74
- 230000008929 regeneration Effects 0.000 claims description 26
- 238000011069 regeneration method Methods 0.000 claims description 26
- 230000008859 change Effects 0.000 claims description 15
- 230000005489 elastic deformation Effects 0.000 claims description 4
- 230000036632 reaction speed Effects 0.000 claims 1
- 238000005265 energy consumption Methods 0.000 description 20
- 238000004088 simulation Methods 0.000 description 18
- 230000007423 decrease Effects 0.000 description 14
- 230000001133 acceleration Effects 0.000 description 12
- 238000005452 bending Methods 0.000 description 7
- 238000007796 conventional method Methods 0.000 description 5
- 239000000446 fuel Substances 0.000 description 4
- 239000000725 suspension Substances 0.000 description 4
- 230000003685 thermal hair damage Effects 0.000 description 4
- 101100022323 Drosophila melanogaster Marf gene Proteins 0.000 description 3
- 101100456970 Mus musculus Mfn2 gene Proteins 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 3
- 239000006096 absorbing agent Substances 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images



























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0162—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input mainly during a motion involving steering operation, e.g. cornering, overtaking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0152—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the action on a particular type of suspension unit
- B60G17/0157—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the action on a particular type of suspension unit non-fluid unit, e.g. electric motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G21/00—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces
- B60G21/02—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected
- B60G21/04—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected mechanically
- B60G21/05—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected mechanically between wheels on the same axle but on different sides of the vehicle, i.e. the left and right wheel suspensions being interconnected
- B60G21/055—Stabiliser bars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2202/00—Indexing codes relating to the type of spring, damper or actuator
- B60G2202/10—Type of spring
- B60G2202/13—Torsion spring
- B60G2202/135—Stabiliser bar and/or tube
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2202/00—Indexing codes relating to the type of spring, damper or actuator
- B60G2202/40—Type of actuator
- B60G2202/42—Electric actuator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2204/00—Indexing codes related to suspensions per se or to auxiliary parts
- B60G2204/80—Interactive suspensions; arrangement affecting more than one suspension unit
- B60G2204/82—Interactive suspensions; arrangement affecting more than one suspension unit left and right unit on same axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2300/00—Indexing codes relating to the type of vehicle
- B60G2300/60—Vehicles using regenerative power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
- B60G2400/051—Angle
- B60G2400/0511—Roll angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
- B60G2400/052—Angular rate
- B60G2400/0521—Roll rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/20—Speed
- B60G2400/204—Vehicle speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/17—Proportional control, i.e. gain control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/18—Automatic control means
- B60G2600/182—Active control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/01—Attitude or posture control
- B60G2800/012—Rolling condition
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
Description
従来のロール制御装置においては、アクティブスタビライザ装置による消費エネルギについては考慮されておらず、車体のロール角速度に対する前輪側及び後輪側のアクチュエータの回転角のゲイン(以下「制御ゲイン」という)は一定の値に設定されている。しかし、後に詳細に説明するように、アクティブスタビライザ装置による消費エネルギを低減する上で最適な制御ゲインは、前輪側及び後輪側のアクチュエータによって異なり、車速及び車体のロール角変化の周波数によっても異なることが判明した。よって、アクティブスタビライザ装置による消費エネルギを低減するためには、前輪側及び後輪側のアクチュエータについて、車速及び車体のロール角変化の周波数と最適な制御ゲインとの関係を予め求めておき、その関係に基づいて制御ゲインを制御することが好ましい。
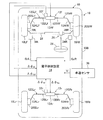
本発明によれば、前輪側アクティブスタビライザ装置(12f)と、後輪側アクティブスタビライザ装置(12r)と、前輪側及び後輪側アクティブスタビライザ装置を制御する制御装置(14)と、を有し、各アクティブスタビライザ装置は、車両の横方向に延在するバー(12BLf、12BRf、12BLr及び12BRr)と該バーと一体をなしバーを横切る方向に延在するアーム部(12ALf、12ARf、12ALr及び12ARr)とを含む左右のスタビライザ(12SLf、12SRf、12SLr及び12SRr)と、左右のスタビライザのバーを相対回転させる電動アクチュエータ(12Af及び12Ar)とを有し、制御装置は、車体(16B)のロール角速度(φd)と制御係数(C)との積に基づいて車体のロール角(φ)を低減するための目標アンチロールモーメント(Mart)を演算し、前輪側及び後輪側アクティブスタビライザ装置が発生するアンチロールモーメント(Marf及びMarr)の和が目標アンチロールモーメントになるように前輪側及び後輪側の電動アクチュエータを制御するよう構成された車両(16)のロール制御装置(10)が提供される。
本発明の一つの態様においては、評価関数は、前輪側及び後輪側アクティブスタビライザ装置の仕事率の和に基づく平均仕事率(EF1、EF2)である。
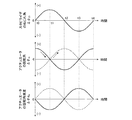
本発明の理解が容易になるよう、実施形態の説明に先立ち、図3乃至図6を参照して、本発明における車両のロール制御の原理について説明する。
Δφf=ΔφAf+ΔφCf …(1)
Δφr=ΔφAr+ΔφCr …(2)
Mart=−C・φd …(3)
Mar=Kf・ΔφAf+Kr・ΔφAr …(4)
Mart=Kf・ΔφAf+Kr・ΔφAr …(5)

図1において、ロール制御装置10は、前輪側アクティブスタビライザ装置12fと、後輪側アクティブスタビライザ装置12rと、前輪側及び後輪側アクティブスタビライザ装置を制御する制御装置である電子制御装置14と、を有している。前輪側アクティブスタビライザ装置12fは、車両の横方向に延在するバー12BLf、12BRfと、対応するバーと一体をなしバーを横切る方向(後方)に延在するアーム部12ALf、12ARfとを含む左右のスタビライザ12SLf、12SRfと、左右のスタビライザのバーを相対回転させる電動アクチュエータ12Afとを有している。バー12BLf及び12BRfは、図には示されていない支持部材を介して、車両16の車体16Bに対し回転可能に車体により支持されている。アーム部12ALf及び12ARfは、それぞれ外端にて左前輪18Lf及び右前輪18Rfのサスペンション部材20SLf及び20SRfに連結されている。
車体のロール慣性モーメント:768kgm2
前輪のロール剛性:1500Nm/deg
後輪のロール剛性: 1000Nm/deg
前輪のショックアブソーバの減衰係数:1920Nm/(rad/s)
後輪のショックアブソーバの減衰係数: 1920Nm/(rad/s)
制御係数C:2000Nm/(rad/s)
車両のばね上質量: 2000kg
重心高:0.55m
トレッド:1.6 m
ホイールベース:2.78m
ΔφAft=Gft・φd …(16)
ΔφArt=Grt・φd …(17)
第二の実施形態においては、電子制御装置14は、下記の点を除き第一の実施形態と同様に電動アクチュエータ12Af及び12Arの回転角ΔφAf及びΔφArがそれぞれ目標回転角ΔφAft及びΔφArtになるように前輪側及び後輪側アクティブスタビライザ装置を制御する。なお、電動アクチュエータ12Af及び12Arの電動機による回生は行われない。即ち、電動アクチュエータ12Af及び12Arの電動機が対応するスタビライザによって回転せしめられる状況においても、回生は行われない。後述の第四、第六及び第八の実施形態においても、電動アクチュエータ12Af及び12Arの電動機による回生は行われない。
第三の実施形態においては、10km/h毎に区分された複数の車速域毎に種々の周波数ωについて、上記評価関数EF3が最小になるときの車体のロール角速度φdに対するアクチュエータ104Af及び104Arの回転角ΔφAf及びΔφArのゲインGf及びGrが、最適の制御ゲインGft及びGrtとしてシミュレーションにより予め求められている。シミュレーションに使用された車両の仕様は第一の実施形態の仕様と同一である。以下の第三の実施形態の説明においては、「評価関数EF3が最小になるとき」を「最適制御」と表記する。
第四の実施形態においては、10km/h毎に区分された複数の車速域毎に種々の周波数ωについて、上記評価関数EF4が最小になるときの車体のロール角速度φdに対するアクチュエータ104Af及び104Arの回転角ΔφAf及びΔφArのゲインGf及びGrが、最適の制御ゲインGft及びGrtとしてシミュレーションにより予め求められている。シミュレーションに使用された車両の仕様は第一の実施形態の仕様と同一である。以下の第四の実施形態の説明においては、「評価関数EF4が最小になるとき」を「最適制御」と表記する。
第五の実施形態においては、10km/h毎に区分された複数の車速域毎に種々の周波数ωについて、上記評価関数EF5が最小になるときの車体のロール角速度φdに対するアクチュエータ104Af及び104Arの回転角ΔφAf及びΔφArのゲインGf及びGrが、最適の制御ゲインGft及びGrtとしてシミュレーションにより予め求められている。シミュレーションに使用された車両の仕様は第一の実施形態の仕様と同一である。以下の第五の実施形態の説明においては、「評価関数EF5が最小になるとき」を「最適制御」と表記する。
第六の実施形態においては、10km/h毎に区分された複数の車速域毎に種々の周波数ωについて、上記評価関数EF6が最小になるときの車体のロール角速度φdに対するアクチュエータ104Af及び104Arの回転角ΔφAf及びΔφArのゲインGf及びGrが、最適の制御ゲインGft及びGrtとしてシミュレーションにより予め求められている。シミュレーションに使用された車両の仕様は第一の実施形態の仕様と同一である。以下の第六の実施形態の説明においては、「評価関数EF6が最小になるとき」を「最適制御」と表記する。
第七の実施形態においては、10km/h毎に区分された複数の車速域毎に種々の周波数ωについて、上記評価関数EF7が最小になるときの車体のロール角速度φdに対するアクチュエータ104Af及び104Arの回転角ΔφAf及びΔφArのゲインGf及びGrが、最適の制御ゲインGft及びGrtとしてシミュレーションにより予め求められている。シミュレーションに使用された車両の仕様は第一の実施形態の仕様と同一である。以下の第七の実施形態の説明においては、「評価関数EF7が最小になるとき」を「最適制御」と表記する。
第八の実施形態においては、10km/h毎に区分された複数の車速域毎に種々の周波数ωについて、上記評価関数EF8が最小になるときの車体のロール角速度φdに対するアクチュエータ104Af及び104Arの回転角ΔφAf及びΔφArのゲインGf及びGrが、最適の制御ゲインGft及びGrtとしてシミュレーションにより予め求められている。シミュレーションに使用された車両の仕様は第一の実施形態の仕様と同一である。以下の第八の実施形態の説明においては、「評価関数EF8が最小になるとき」を「最適制御」と表記する。
Claims (7)
- 前輪側アクティブスタビライザ装置と、後輪側アクティブスタビライザ装置と、前記前輪側及び後輪側アクティブスタビライザ装置を制御する制御装置と、を有し、各アクティブスタビライザ装置は、車両の横方向に延在するバーと該バーと一体をなしバーを横切る方向に延在するアーム部とを含む左右のスタビライザと、回転することにより前記左右のスタビライザのバーを相対回転させるよう構成された電動アクチュエータとを有し、前記制御装置は、車体のロール角速度と制御係数との積に基づいて車体のロール角を低減するための目標アンチロールモーメントを演算し、前記前輪側及び後輪側アクティブスタビライザ装置が発生するアンチロールモーメントの和が前記目標アンチロールモーメントになるように前記前輪側及び後輪側の電動アクチュエータを制御するよう構成された車両のロール制御装置において、
前記制御装置は、前記前輪側及び後輪側の電動アクチュエータの回転角速度と対応するアーム部の弾性変形により発生されるスタビライザ反力との積をそれぞれ前記前輪側及び後輪側アクティブスタビライザ装置の仕事率として、前記前輪側及び後輪側アクティブスタビライザ装置の仕事率に基づく評価関数を最小にするための前記前輪側及び後輪側の電動アクチュエータの最適の制御ゲインと車速及び車体のロール角変化の周波数との関係を記憶しており、
前記制御装置は、車速及び車体のロール角変化の周波数に基づいて、前記記憶された関係から前記前輪側及び後輪側の電動アクチュエータの最適の制御ゲインを求め、前記前輪側及び後輪側の電動アクチュエータの制御ゲインが前記求められた最適の制御ゲインになるように、前記前輪側及び後輪側の電動アクチュエータを制御するよう構成された車両のロール制御装置。 - 請求項1に記載の車両のロール制御装置において、前記評価関数は、前記前輪側及び後輪側アクティブスタビライザ装置の仕事率の和に基づく平均仕事率である車両のロール制御装置。
- 請求項1に記載の車両のロール制御装置において、前記評価関数は、前記前輪側及び後輪側アクティブスタビライザ装置の仕事率の和の最大値である車両のロール制御装置。
- 請求項1に記載の車両のロール制御装置において、前記評価関数は、前記前輪側及び後輪側アクティブスタビライザ装置の平均仕事率の大きい方の値である車両のロール制御装置。
- 請求項1に記載の車両のロール制御装置において、前記評価関数は、前記前輪側及び後輪側アクティブスタビライザ装置の仕事率の最大値の大きい方の値である車両のロール制御装置。
- 請求項1乃至5の何れか一つに記載の車両のロール制御装置において、前記制御装置は、車両のロールにより前記アクチュエータが回転せしめられて発電する状況においては、発電エネルギを回収する回生を行うよう構成され、回生を行うときには対応する前記アクティブスタビライザ装置の仕事率を負の値にするよう構成された車両のロール制御装置。
- 請求項1乃至5の何れか一つに記載の車両のロール制御装置において、前記制御装置は、車両のロールにより前記アクチュエータが回転せしめられて発電する状況においても、発電エネルギを回収する回生を行わないよう構成され、車両のロールにより前記アクチュエータが回転せしめられる状況においては、前記アクティブスタビライザ装置の仕事率を0にするよう構成された車両のロール制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017073490A JP6573082B2 (ja) | 2017-04-03 | 2017-04-03 | 車両のロール制御装置 |
| DE102018107646.0A DE102018107646B4 (de) | 2017-04-03 | 2018-03-29 | Wanksteuervorrichtung für ein fahrzeug |
| US15/941,842 US10703160B2 (en) | 2017-04-03 | 2018-03-30 | Roll control apparatus for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017073490A JP6573082B2 (ja) | 2017-04-03 | 2017-04-03 | 車両のロール制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018176759A JP2018176759A (ja) | 2018-11-15 |
| JP6573082B2 true JP6573082B2 (ja) | 2019-09-11 |
Family
ID=63525912
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017073490A Expired - Fee Related JP6573082B2 (ja) | 2017-04-03 | 2017-04-03 | 車両のロール制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10703160B2 (ja) |
| JP (1) | JP6573082B2 (ja) |
| DE (1) | DE102018107646B4 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018114819A (ja) * | 2017-01-18 | 2018-07-26 | Ntn株式会社 | 車両用サスペンション装置 |
| KR102277285B1 (ko) * | 2017-06-30 | 2021-07-14 | 현대모비스 주식회사 | 후륜 조향 제어 장치 및 방법 |
| US11279195B2 (en) * | 2019-07-30 | 2022-03-22 | Honda Motor Co., Ltd. | Individual active torsional springs |
| DE102019213309A1 (de) * | 2019-09-03 | 2021-03-04 | Zf Friedrichshafen Ag | Aktive Wankstabilisierung mit mittels einer Sollwertbegrenzung verbesserter Ansteuerung |
| US11865891B2 (en) * | 2020-10-30 | 2024-01-09 | GM Global Technology Operations LLC | Method and system for active roll control |
| CN113375636B (zh) * | 2021-05-18 | 2022-05-31 | 东风柳州汽车有限公司 | 汽车侧倾测试方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0829648B2 (ja) * | 1987-03-16 | 1996-03-27 | 日産自動車株式会社 | 車両用サスペンシヨン制御装置 |
| GB9822520D0 (en) * | 1998-10-16 | 1998-12-09 | Rover Group | Vehicle suspension |
| JP4438406B2 (ja) * | 2003-06-27 | 2010-03-24 | アイシン精機株式会社 | スタビライザ制御装置 |
| US7647148B2 (en) * | 2003-12-12 | 2010-01-12 | Ford Global Technologies, Llc | Roll stability control system for an automotive vehicle using coordinated control of anti-roll bar and brakes |
| JP4303140B2 (ja) * | 2004-02-12 | 2009-07-29 | アイシン精機株式会社 | スタビライザ制御装置 |
| US20050225301A1 (en) * | 2004-04-07 | 2005-10-13 | Arnold Edward H | Method and system for determining the health of a battery |
| JP4696983B2 (ja) * | 2006-03-15 | 2011-06-08 | トヨタ自動車株式会社 | 車輌振動に応じてアクティブスタビライザが制御される車輌 |
| JP4525651B2 (ja) * | 2006-09-15 | 2010-08-18 | トヨタ自動車株式会社 | 車両用サスペンションシステム |
| JP2009099303A (ja) * | 2007-10-15 | 2009-05-07 | Hitachi Displays Ltd | 有機el表示装置 |
| JP4333792B2 (ja) * | 2007-10-17 | 2009-09-16 | トヨタ自動車株式会社 | 車体ロール抑制システム |
| JP5505319B2 (ja) * | 2011-01-18 | 2014-05-28 | 株式会社エクォス・リサーチ | 車両 |
| JP6583255B2 (ja) * | 2016-12-27 | 2019-10-02 | トヨタ自動車株式会社 | 車両走行制御装置 |
-
2017
- 2017-04-03 JP JP2017073490A patent/JP6573082B2/ja not_active Expired - Fee Related
-
2018
- 2018-03-29 DE DE102018107646.0A patent/DE102018107646B4/de not_active Expired - Fee Related
- 2018-03-30 US US15/941,842 patent/US10703160B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE102018107646A1 (de) | 2018-10-04 |
| US10703160B2 (en) | 2020-07-07 |
| DE102018107646B4 (de) | 2020-10-29 |
| US20180281547A1 (en) | 2018-10-04 |
| JP2018176759A (ja) | 2018-11-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6573082B2 (ja) | 車両のロール制御装置 | |
| JP4050018B2 (ja) | サスペンション制御装置 | |
| RU2421354C2 (ru) | Приводное устройство транспортного средства | |
| JP5007775B2 (ja) | 車両運動制御システム | |
| JP4471103B2 (ja) | 車両の制駆動力制御装置 | |
| JP4810962B2 (ja) | 車両用サスペンションの制御方法および装置 | |
| JP6607229B2 (ja) | 車両姿勢制御装置 | |
| JP5146540B2 (ja) | 操舵制御装置 | |
| EP3865359B1 (en) | Method to control, while driving along a curve, a road vehicle with a variable stiffness and with rear steering wheels | |
| US11203243B2 (en) | Control system for variable damping force damper | |
| CN108128348A (zh) | 基于鸟群算法的电动助力转向系统及其多目标优化方法 | |
| JP2018131088A (ja) | 車両の姿勢安定化装置 | |
| JP2013126874A (ja) | 車両のローリング挙動制御装置 | |
| JP4193648B2 (ja) | 車輌の走行状態判定装置 | |
| JP2009132378A (ja) | 車両及び制御装置 | |
| JP5212271B2 (ja) | 車両用制御装置 | |
| CN207607531U (zh) | 基于鸟群算法的电动助力转向系统 | |
| JP5747616B2 (ja) | 車体傾動制御装置、車体傾動制御方法 | |
| JP7576426B2 (ja) | 車両制御装置、および、車両制御方法 | |
| JP2009035047A (ja) | 車両の旋回挙動制御方法および装置 | |
| JP7574763B2 (ja) | 車両、及び車両用サスペンションの制御方法 | |
| KR20180083045A (ko) | 액티브 롤 제어 장치 및 방법 | |
| JP3582334B2 (ja) | パワーステアリング装置 | |
| JP3209467B2 (ja) | 自動車用後輪サスペンション装置 | |
| JP5476909B2 (ja) | 操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180921 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190711 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190717 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190730 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6573082 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |