地質工学的エンジニアリングの分野において、傾斜計と呼ばれる計器は、1自由度または2自由度の傾斜と、傾斜計の長さと、ボアホールを補強する傾斜計ケーシング内の直線状の溝によって制御される傾斜計の縦軸周りの傾斜計の既知の姿勢とに基づいてボアホールの経路を計算することを目的として、水平ボアホールまたは鉛直ボアホールの傾斜を測定するため利用できる。傾斜計はケーシングに沿って移動されるか、傾斜を読み取るため空間的間隔で停止される(移動式傾斜計)か、または、複数の傾斜計がケーシング内に置かれ、時間的間隔で読み取られる(定位置傾斜計)のいずれかである。移動式傾斜計および定位置傾斜計は、本明細書では、「従来の傾斜計」と呼ぶ。
定位置傾斜計に対する改良は、特許が付与されている(Danischの363号特許)。これは、傾斜センサと嵌め合わされた剛性管(剛体)から構成された校正済み測定計器であり、管は、ねじれ耐性のある内蔵式の屈曲可能なジョイントによって分離され、傾斜センサは、経路形状および経路に沿った振動を測定するために溝付きケーシングなしで直接的に使用され得る。Danischの363号特許を、以下、「SAA」、すなわち、シェイプ・アクセル・アレイ(ShapeAccelArray)と呼ぶ。SAAは、SAAの縦軸周りの各剛性本体の方位アライメントを行うためにケーシング内に溝を必要としない。ねじれ耐性ジョイントは、方位アライメントを維持する。製造中に物理的に制御されることがない各剛性本体の方位は、SSAが略水平方向であるとき、各本体の「ロール」角度を測定するために各本体においてXおよびY傾斜センサを使用することにより、製造工程の最後に校正される。製造中に、センサの全てのオフセットおよび利得は、広い温度範囲に亘りおよび全ての角度に亘り正確な傾斜測定が行われるように、校正される。
両方の従来の傾斜計およびSAAは、傾斜の重力測定を信頼する。傾斜の測定は、基準座標系の軸が傾転されるとき、基準座標系内でばねによって支持された質量に作用する重力ベクトルの一部を決定することになる。一部の場合、従来の傾斜計は、ばねおよび質量の代わりに、液体充填湾曲管を使用する。他の場合、サーボ制御ばねおよび質量が使用される。
傾斜計に類似する別の従来技術の測定システムは、「バセット・コンバージェンス・システム」である。これは、全てが断面の平面内にあるトンネルの周囲の周りに円弧形を形成するアーム(金属ロッド)のアレイである。アームとアームとの間の角度は、てこ式傾斜センサを使って測定され、てこは、動きと、変化する断面形状への追従性とを増幅させる。角度測定は、1自由度である。コンバージェンスは、トンネルの中心へ向かう、または、中心から離れるトンネル壁の動きである。類似の測定は、弧形に形成され、トンネルの内壁に取り付けられた管の内部に、さらに断面の平面内に配置されたSAAによって行われる。弧形の角度変形は、1自由度で測定され、バセット・コンバージェンス・システムの場合と同様に平面集束を測定するために使用される。
両方の従来の傾斜計とSAAとの差は、以下を含む。
・システムが経路に沿って軸方向に圧縮および膨張できないこと、または、計器の近く
で、沈降土壌の圧縮または膨張土の膨張のような、媒体の軸方向変形を測定できないこと。これは、経路が名目上は直線状であるためである。たとえば、傾斜計ケーシングの周りの土壌圧縮は、ケーシングの長さ、または、計器内側の傾斜を変化させないであろう。一部の場合、伸縮式ケーシングは、土壌圧縮が変化するのにつれてケーシングの短縮または延長を可能にするために使用されるが、傾斜は、変化がなく、これは、意図のとおりである。その他の計器がケーシングまたは土壌の圧縮を測定するために必要とされる。非常に可撓性を有するケーシングに設置され得るが、直線状に設置されたSAAであっても、1つの軸方向位置における大きな横方向剪断に起因して経路の端から端までの変位の鉛直成分に何らかの変化を引き起こす可能性がある(たとえば、地滑りによる)非常に大きな横方向変形の場合を除いて、ケーシング周りの土壌圧縮または拡張による影響を受けないであろう。横方向変形が起こった場合でも、軸方向変形は、あるとしても、横方向変形から区別され得ない。横方向変形が最初に起こることが分かっている場合に限り、純然たる軸方向圧縮または拡張が後に続くことが分かり、確信をもって全軸方向成分を測定することができるであろう。しかし、純然たる横方向の動きおよび軸方向の動きのこのようなシーケンスが起こるかどうかは不明であり、仮定に基づいている。これらのシーケンスが実際に起こるとしても、経路に沿った様々な高度での軸方向変形の詳細は、提供されないであろう。バセット・コンバージェンス・システムは、これの湾曲弧形に沿った膨張を許容するが、この膨張を測定することなく、トンネルもこれらの周囲を大まかに変えることなく、トンネルは、一定の弧長さを維持したままで形状を大まかに変える。
・経路が略水平であるとき、経路の横方向変形を測定できないこと。これは、重力ベクトル周りの重力測定計器の回転は、いずれも計器への重力の影響を変化させないためである。
・1台の計器を使って表面の形状を測定できないこと。殆どの従来技術の傾斜計および
SAA計器は、最初に直線の変形を測定する。複数の直線計器が表面の形状を規定するために必要であろう。
・経路に沿って、または、経路の近くの様々な位置で軸方向変形の詳細を測定できない
こと。これは、軸方向変形を全く測定しないこと、または、上記仮定の場合、SSAが最初に純然たる横方向変形を受け、続いて純然たる軸方向変形を受けることの結果であり、経路に沿った軸方向変形の詳細は、存在することなく、1つの横方向変形特徴に対して(1つの軸方向位置での剪断のような)1つの軸方向変形数しか存在しないであろう。
・弧形におけるSAA、または、バセット・コンバージェンス・システムの弧形のよう
なコンバージェンス測定の弓形経路の鉛直平面内部の変形以外を測定できないこと。コンバージェンス測定は、トンネルの中心へ向かう、または、中心から離れる動きに限定され、弧形もしくは円形に配置された傾斜または角度センサによって実行される。弧形もしくは円形の平面から外れる方向における変形についての測定は行われない。
・ケーシングまたは管の内部に測定計器を固定できないこと。ボアホールまたは他の狭い通路内の計器は、通路の中へ自由に入ることができるものの、測定時に通路の壁と確実な接触を確立することができなければならない。SAAの場合、これは、軸方向圧縮下にあるときに膨張するジョイントを使用して行われるが、膨張の範囲は、接触を部分的にしか安定化させることができない。傾斜計の場合、ばね荷重ホイールがケーシング内の溝に係合するため使用されるが、ばね荷重ホイールは、摩耗する可能性があり、製造コストが高く、取り扱いが難しい。可膨張式嚢のようなその他の締め付け方法が利用可能であるが、これらは、コスト高であり、かつ、複雑である。
従来の傾斜計およびSAAについての従来技術の説明は、おおよそ最初に直線状の経路に限定されるが、(経路に沿って全体的、または、詳細の何れにも)拡張および圧縮を予測することなく、拡張および圧縮の計算を考慮することなく、意図的直線ではない経路の両端点の間で直線分離の変化を引き起こす幾何学的形状から生じる横方向変形を予測することなく、横方向変形の計算を考慮することもない。SAAの従来技術も傾斜計の従来技術も水平面内の中間軸の横方向変形の測定が行われる略水平方向の中間軸に沿った設置を検討していない。中間軸は、傾斜計またはSAAの経路を含む表面の最長寸法と軸方向に整列された直線または曲線を意味する。中間軸は、経路の「中心」を辿る。直線経路の場合、これが経路である。波状形の経路の場合、中間軸は、おおよそ等しい量の波状形の中間に位置する。中間軸は、本説明において後でより注意深く定義されるであろう。
従来技術のSAAおよび傾斜計の説明は、略鉛直、斜め、または水平の直線経路形状に限定され、経路の拡張または圧縮が可能ではなく、水平面内の水平経路の横方向変形の測定が可能ではない。例外は、鉛直平面内の1自由度(1DOF)センサの円形または弧形によって実行されるコンバージェンス測定である。しかし、これらの弓形測定は、平面の内部の動きに限定され、表面に物理的に嵌め合わせることが困難である(バセット・コンバージェンス・システム)、または、不完全な嵌め合い(プラスチック管の内部の弓形または円形形状におけるSAA)のいずれかである。SAAの不完全な嵌め合いは、本説明において後で明らかにされる。
従来技術において、SAAは、直線状の管の中に置き、軸方向圧縮下でジョイントを膨張させ、管の内面に接触させることによって設置される。これは、管の内部でSAAを安定化させるために役立つが、全ての動きを防ぐために十分ではない。ジョイントは、ねじれを低減するために十分に短くする必要があるが、それにもかかわらず、長さ不足は、ジョイントが軸方向荷重下で膨張できる程度を制限する。膨張は、管への挿入、または、管からの抜き取り中に軽減する必要があり、その結果、ジョイントは、これを行うために十分に可撓性を有することが必要であるが、それでもやはり、膨張させられたときに管の内部でアレイを固定して保持するために十分な剛性を有している。この結果は、不完全に固定されたアレイをもたらす妥協案である。
地質学的エンジニアリングの分野において、拡張または圧縮に起因した変形を表し、一部の場合、不安定な勾配または地滑りのような土壌の1層以上の層の剪断に起因した横方向変形も同時に起こる土壌の変形を測定することが必要である。土壌の圧縮は、通常、土壌の内部の泥炭のような圧縮可能な媒体の存在、または、空隙の存在に関連付けられる。拡張は、土壌内に存在する膨張粘土もしくは膨張化合物の存在、または、軟弱な土壌を安定化させることを意図したグラウトの圧入の結果として生じる可能性がある。言い回しを簡単にするため、用語「拡張」(または「圧縮」)は、別段の条件付けがない限り、拡張または圧縮は、正または負である可能性がある(負の拡張は、圧縮であると考えることができる)ので、両方の場合を網羅するために使用されるであろう。拡張は、ボアホールに隣接した土壌に固定された磁石と、土壌内でボアホールに沿って動かされる磁気センサを使用して測定され得るが、この測定は、横方向変形に関するデータを提供することなく、センサの手動による動きを必要とする。
地質工学的エンジニアリングの分野において、勾配の先端での横方向変形を測定することが必要であり、上方からの剪断作用は、勾配の底(「先端」)の近くでの横方向の土壌の拡散につながる可能性がある。SAAまたは従来の傾斜計が勾配の先端で水平方向に設置された場合、これは、水平平面ではなく鉛直平面の内部で変形の測定を行うであろう。これは、水平平面内での重力測定装置の回転が鉛直次元周りの重力場の対称性に起因して感知されないためである。複数の鉛直SAAまたは従来の傾斜計は、水平平面の内部の変形に関するデータを提供するために設置され得るが、これは、コスト高である。
トンネル測定および壁測定の分野において、トンネルまたは壁に沿った略水平方向の経路に配置された従来の傾斜計またはSAAの設置は、水平平面内の重力測定装置の回転が鉛直次元周りの重力場の対称性に起因して感知されないので、横方向変形を測定しないであろう。たとえば、壁が膨れ出る場合、または、トンネル壁が直ぐ近くの掘削もしくはグラウト圧入に起因して水平平面内で湾曲する場合、水平平面内の膨らみもしくは曲線の成分は、上記水平方向に置かれた計器によって測定されることはないであろう。各々がトンネルまたは壁より下にある動かない土壌壁から延在する複数の鉛直方向の従来の傾斜計またはSAAが設置されることがあるが、この解決策は、コスト高であり、導入するのは難しい。
同様に、トンネル測定の分野において、従来の傾斜計またはSAAをトンネルの天井、床、もしくは壁に沿った水平経路内に置き、決して水平面ではなく鉛直平面内の変形の測定を行うことが知られている。鉛直平面内の任意の角度でトンネルの中心へ向かう、もしくは、中心から離れるトンネル壁の動きで構成されたコンバージェンスを測定するため、このような計器をトンネルの鉛直断面の周囲もしくは周囲の一部分の周りの略円形の経路に置くことがさらに知られている。しかし、単一の経路を有する単一の重力ベースの計器を使用してトンネルの3次元(3次元)形状を測定する装置および方法は存在せず、ここで、「3次元」は、鉛直沈下、水平沈下、およびコンバージェンスを意味する。類推は、水平方向および鉛直方向波状形とこの波状形の断面の形状とを含む蛇の全ての動きを測定することであろう。
より具体的には、上記採用されたコンバージェンス測定の分野において、従来技術における測定は、いつでも計器の弧形の平面の範囲にある。平面の内部だけでなく、平面から外へ抜け出し、トンネルの軸方向に沿った動きと関連付けられたトンネルの3次元態様を含むデータを提供するために単一の計器が必要である。
地質学的エンジニアリングの分野において、拡張が許され、計器の一部分が平面内で上または下に湾曲することが許され、横方向の動きが許され、全てのパラメータが測定される、略水平の経路に配列された従来の傾斜計またはSAAの設備装置を使用して鉛直平面内の変形を測定することが必要である。たとえば、寝台車および線路を支持するバラストの変化を検出するために線路に隣接して、または、路肩の崩壊を検出するために道路の路肩に沿って傾斜計もしくはSAAを設置することが望ましい。水平方向直線状計器の限界は、バラストまたは路肩材料が、たとえば、崩壊もしくは沈下によって、経路の下から取り除かれた場合、計器の経路は、計器が拡張不能であり、沈下の領域の両方のエッジで引っ張っている状態のままであるため、曲がっていない状態を保つ可能性があることである。このようにして、沈下が起こり、測定されない可能性があり、または、深さが非常に減衰した状態で測定される可能性がある。
地質工学的エンジニアリングの分野において、ケーシングの内部で動き、傾斜測定または振動測定に誤差を生じさせないように傾斜計またはSAAを固定することが必要である。
従来の傾斜計は、典型的に、ケーシングの壁との傾斜計本体の方位角制御および一貫性のある位置合わせを行うためにホイールが溝内に係合された状態で、溝付きケーシング内に設置される。SAAは、典型的に、溝なしのケーシング内に設置される。SSAは、耐ねじり性のジョイントを有し、SAAに沿って一貫した方位角を提供するために校正されている。傾斜計またはSAAのケーシングの直径と剛体の長さおよび直径とは、ケーシングが測定を乱すことなく曲がり得る量に関して上限に設定される。この乱れは、剛体の曲げ、または、計器が測定中、設置中、または引き抜き中にケーシングに沿って移動できないことの結果として生じる可能性がある。これは、ケーシングの曲げが非常に急峻であるより大きな変形が存在する場合、または、岩盤内の計器の場合、重大な問題である。このような状況では、直径のより大きなケーシングを設置し、より短い剛体を使用することが概して望ましいが、これは、コストの上昇、および、ぴったり適合しない計器を生じさせる。追加の治具なしに、および、ジョイントを膨張させることなく、小径計器をより直径の大きな円筒体の内側に追従させる手段は、従来技術に記載されていない。
従来技術の発明は、非直線状のセンサ経路を含んでいるが、屈曲および湾曲センサ(「曲率」センサ)に頼っている。たとえば、Danishの107号特許(シェイプロープ)は、
「少なくとも1自由度で曲がり、中間軸もしくは平面に沿って延びることができる、可撓性を有する、しなやかな測定部材の形をした、空間内の幾何学的構成に対応するデータを提供する測定装置である。部材は、部材上の既知の位置に分布し、既知のセンサ空き間隔によって分離された、間隔を空けて配置された屈曲センサを有し、これらの位置に存在する屈曲の局所的状態を示す屈曲信号を提供する。部材は、多数の形作られた、すなわち、成形された繊維を備え、これらの繊維は、屈曲センサを提供するセンシング部を有するセンシング繊維を含み、様々な繊維のセンシング部は、センサ空き間隔で位置するように部材に沿って異なる距離に位置し、形作られた繊維は、互いに連続的または繰り返し的に接触することによるように、相互に支持する関係にある。このような繊維は、部材の殆どまたは全部を構成することがある。」
と記述する。
連結アレイ状の屈曲センサを使用する装置は、重大な欠陥を有し、センサのうち1台に誤差があるとき、計算順に点を通過するアレイの全ての姿勢は、誤差の角度によって、測定された経路を表すデータセット全体を経路から十分に遠くへ変動させる誤差の角度オフセットを共有するであろう。これは、経路の端部で大きな変位を生じさせる可能性がある。
さらに、Danischの107号特許において、繊維は、予備成形され、軸方向に圧縮され、それによって、取り囲む表面に追従するように横方向に膨れるのに適していない相互に支持する関係にある。実際には、Danischの107号特許は、引き延ばされ得るシェイプロープのエラストマー成形のため別個の拡張センサを使用することを提案する。Danischの107号特許は、直線状に配置され得るリールに巻き上げられ、その後、ボアホールの中へ挿入し、軸方向圧縮力を加えることによって螺旋に成形されることがある直線アレイを教示することがない。その代わりとして、Danischの107号特許は、多数の繊維が一定寸法と傾斜を測定する重力センサの使用を受け入れやすくない構成とを有する相互に支持する螺旋の中へ予備成形されることを必要とする。可撓性ジョイントによって分離され、物体との接触によって簡単に歪められる可撓性部材に沿って曲がりをサンプリングするのではなく、重力を基準として領域に沿って一様に傾斜をサンプリングする手段を提供する剛体の教示はない。ねじり剛性を提供するが、剛体と剛体との間の曲げを可能にする可撓性ジョイントの教示はない。姿勢誤差が計算チェーンまで伝播し得ないように全てのセンサが重力を基準とする教示はない。姿勢が、曲げおよびねじれの測定値から推定されるのではなく、重力測定センサによって直接的に読み取られることがあるように剛体内にあるセンサの教示はない。それ自体が既に螺旋ロープ型である光ファイバまたは容量式ファイバアレイを螺旋形式に成形する教示があるが、ばねを成形する、または、螺旋階段を建造すること以外に従来技術と区別できない。教示は、可撓性部材の内部循環構造の結果として、この可撓性部材がとることのできる型の説明である。
本発明は、螺旋型、波状形の型、およびジグザグ型(円筒型)を特定の新しいパラメータに組み込むと共に、測定された型へのセンサアレイの嵌め合いを改良するが、これが全てではない。主な進歩性は、重力の指向性に起因して、姿勢範囲に制限があるので不可能であるように思われるが、測定を行うためにMEMS(微小電気機械システム)型加速度計を利用することである。
曲げおよびねじれセンサは、ロープ状構造物の全体的な姿勢とは無関係にこのロープ状構造物の3次元における屈曲を簡単に測定することができるが、静止した加速度計測定値(「傾斜」測定または「重力」測定)は、これまでは、全体的な姿勢が鉛直から±約60度の範囲にある場合に、3次元測定を行うために限り使用することができた。これは、X,YまたはZセンサがいずれも重力ベクトル周りの回転に全く応答することなく、XおよびYセンサ(SAAが鉛直であるとき、傾斜に対する最大応答を有するセンサ)は、鉛直からの角度の余弦として応答が低下するためである。本発明以前に、鉛直平面の3次元測定を達成する唯一の方法は、1台ずつが基準用の動かない土壌の中へ延びるので、各々に固定基準から3次元データが供給される複数の鉛直SAAを平面に沿って設置することだった。水平側溝に沿ってSAAまたは傾斜計を拡張し、水平面内の動きを捕捉する方法はなかった。土壌沈下運動を薄い、直線状の、センサアレイに結合することも不可能であると考えられていた。螺旋型のSAAが考慮されたが、それでもなおこの型を土壌沈降運動に結合することは、ポアソン比と螺旋歪み比との間の関係(この関係は、本明細書において後で詳細に説明される)が理解されない限り、不可能であると思われた。センサの小型化およびジョイントの建造方法の進歩は、現在、2つの比を一致させるために必要な低ピッチ角度を検討することを可能にさせている。
3次元測定は、曲げおよびねじれセンサを用いて全球範囲の姿勢に亘って行われ得るが、曲げおよびねじれセンサの精度は、地質工学的パラメータを監視するためこれらの測定値を使用することを許容しない。地質工学的測定は、数十年間、数十メートルのアレイ長さに亘って1または2ミリメートルの精度をもたなければならない。Danischの107号特許および672号特許の従来技術において使用された光ファイバ曲率センサのような低コスト曲げおよびねじれセンサは、このような精度の能力がない。これらのセンサは、1日に、1メートルにつき約1cmの能力があり、この値は地質学的測定には足りない。
経路長に亘って曲率を積分する光センサまたは容量式センサではなく、ポイントで測定する重力測定センサと共に用いられる循環型の適応は、「ポイント」センサを格納するために、アレイの傾斜を適切に表現することができるようにジョイント長さと比べて十分に長い剛体の導入を必要とする。実際のセンシング手段は、コスト高の機構を必要とすることなくジョイントができるだけ長くなり得るようにジョイントの設計をさらに必要とする。単調かつ一定の曲げおよび/またはねじれのある長いジョイントの概念は、不変性が維持され得るように使用される場合、はるかに長いジョイントを可能にする。
改良型2次元データも本発明により取得され得る。側溝内に水平に置かれた直線状のアレイは、拡張不可能であり、感知できる沈下のない決壊を単に横切るものであるため、アレイより下にある全ての材料の決壊からのような沈下を見逃す可能性がある。波状形のアレイは、拡張を可能にさせ、測定を行うものであり、Zセンサだけを使って2次元測定しか行われない場合でも非常に有用である。改良型コンバージェンス測定は、円形の平面内部の2次元コンバージェンス測定だけが必要とされる状況において、トンネルの周囲の周辺にあるアレイの略円形の経路の周りでアレイを波状形状にすることにより行われ得る。このコンバージェンスの場合、改良は、波状形のケーシング内により良好に固定されているアレイと、円形経路への拡張性の追加とによってもたらされる。線路のカントおよびねじれの測定は、水平表面の沈下断面を測定する水平面内の他のアレイの波状形と同様に、円筒型配置によって与えられた改良の別の2次元(間違いなく3次元態様をもっている)実施例である。
Danischの107号特許に対する注釈と同様の注釈は、
「位置、姿勢、形状および動き測定器具は、曲げおよびねじれセンサが既知の間隔で表面に沿って分布した可撓性基材の形で提供される。リボン型の基材が好ましい。基材の幾何学的構成は、検出された曲げ値およびねじり値に基づいてセンサの位置および姿勢を相互参照することから計算される。適当な用途は、アニメーションで用いられる人の動き捕捉、コンピュータへの6自由度入力、断層測定、および、大型の特異性のない作業空間内部での位置追跡を含む。」
と記述するDanischの672号特許(「シェイプテープ」)に適用される。
Danischの672号特許は、剛体の姿勢を直接的に測定する剛体内の重力測定センサの使用を教示することがない。その代わりに、これは、リボン状基材に沿って曲げおよびねじれを測定することを教示する。曲げまたはねじり測定が計算経路に沿って不正確である場合、データによって表現されるように、経路の全ての後に続く姿勢は、不正確であろう。Danischの672号特許は、Danischの107号特許と同様に、直線状に配置され得るリールに巻き上げられ、その後に、ボアホールの中へ挿入し、軸方向圧縮力を加えることによって螺旋に形成される直線状のアレイを教示することがない。
Danischの672号特許と107号特許はどちらも、表面から3次元データを取得するために、アレイの形で、および、重力測定センサの使用を利用するように設計された剛体内のセンサの姿勢でセンサアレイを表面に配置することを教示することがない。Danischの672号特許と107号特許はどちらも、各アレイの中間軸を辿る経路内の拡張可能/圧縮可能な仮想アレイの形状を模倣するために、アレイの形から拡張可能/圧縮可能な中間軸を計算することを教示することがない。これらはどちらも、圧縮および拡張が軸に沿って詳細に分かるように中間軸に沿った頂点情報詳細の追跡を教示することがない。672号特許と107号特許はどちらも、アレイの型の軸方向圧縮によって引き起こされた横方向膨張を用いた表面内部でのアレイの固定を教示しない。
Danischの363号特許(SAA)のような従来技術の重力測定アレイ、および、従来の定位置傾斜計が拡張可能な螺旋または波状形の型として設計されていないことと、略水平の配置からの横方向変形を測定することから除外されていることとの理由のうち1つは、Danischの363号特許の新規性であった。363号特許より前に、重力測定センサに頼っているとしても広範囲の角度に亘って機能する可能性がある、と考えられていなかった。傾斜計は、曲がる能力が非常に制限されている溝付きケーシング内に設置される必要があるので、直線状の、または、わずかに湾曲した形状以外の形状は、検討され得なかった。地質工学的分野における思考は、直線状の経路の幾何学的形状に限定されているので、水平経路からの横方向変形を測定することは、測定された重力場がこのような回転に対して変化することがないため不可能である、と考えられた。Danischの363号特許は、同様に範囲が制限され、略水平または略鉛直である直線状の経路内の設置だけを開示している。略水平の直線状の経路は、2次元測定しか生じさせないであろう。363号特許が現場に配置され、363号特許の可撓性および363号特許のセンサの広い角度範囲に起因して、従来の傾斜計の場合に起こり得る変形より遙かに大きい変形を測定できるようになるまで、以前は不可能であった新しい測定を可能にすることになる意図的に循環的な型に設置され、この型のため最適化され得ることが実現されなかった。本発明は、新しい型のSAAを使用して多次元測定、すなわち、鉛直重力場内の略水平の経路の横方向変形を含む均一な測定を実現する方法を記述する。本発明は、重力センサのみと嵌め合わされた拡張不可能な剛体のアレイを使用した、略鉛直な経路の横方向変形および軸方向圧縮の同時測定の記述をさらに含む。
Danischの363号特許(SAA)に対する本発明の他の改良点は、螺旋および波状形の利用によるケーシング内のアレイのより良好な固定を含む。従来技術のDanischの363号特許は、軸方向圧縮下で膨張するが、設置後に約±1mmの動きの可能性を残すジョイントを使用する。螺旋嵌め合いは、可能なこの変動の範囲を基本的に零mmまで減少させる。同様に密な嵌め合いは、SAAの経路がトンネルの周囲の周辺を進むのにつれてSAAの経路を曲がりくねらせることによって、どのような半径のトンネルに対しても、コンバージェンス設置において達成され得る。その他の改良点は、一部の設置において、必要とされるセンサの個数を削減するためより低コストをもたらすより幅の広い剛体分離を使用できることを含む。
本明細書において使用されるように、用語「ワールド座標系」すなわち「WCS」は、Earthと呼ばれるデカルト軸の組、または、他の巨大な物体を指すことが意図されている。剛体のアレイの中に、位置および姿勢の両方においてWCSに対する既知基準を有する剛体がない場合、アレイの形状を知ることがそれでもなお可能であるが、重力場における形状の姿勢は、部分的にしか分からないものであり(方位角は、分からないであろう)、重力源と相対的な位置情報は存在しないであろう。重力は、質量の中心に向かう方向を有する。「重力ベクトル」は、この方向を指す。「重力の向き」も同様であり、地球上で「鉛直」と呼ばれるものである。
上記説明は、
・表面内で曲がりくねる、または、ジグザグ状であるアレイに対する経路、または
・螺旋状であるアレイに対する経路、または、
上記の経路の選択肢のうち1つをほぼ辿るセグメントで構成されたアレイに対する経路
を含むように思われる。
上記のいずれの場合も、中間軸は、水平もしくは鉛直からいかなる角度でもよく、または、円形の場合のように湾曲していてもよい。滑らかな(セグメント化されていない)螺旋は、「3次元波状形」であると考えられ得る。セグメント化された螺旋は、「3次元ジグザグ」であると考えられ得る。逆に、波状形は、「2次元螺旋」と考えられ得る。全てのこれらの経路は、中間軸を「循環的に取り囲み」、通常は繰り返し的に、経路の2次元図において中間軸と交差する。全てのこのような経路は、「循環経路」と呼ばれることがある。非直線状センサアレイは、本発明の目的のため「循環アレイ」と呼ばれることがある。「循環」の厳密な定義は、「一定の間隔で繰り返される」ことを含む。本特許明細書において、循環の広義の定義は、通常は繰り返し的に中間軸と交差するが、交差と交差との間に、ほぼ無作為の、または、なお一層厳密に無作為の間隔を有することがある経路を取り囲む、ということが意図されている。フーリエ理論は、厳密な意味でそれ自体が循環的である(正弦波である)経路のスペクトル成分をいつでも見つけるので、「一定の間隔」への関心がなくてもよい。より重要である特性は、測定対象である表面の内部の閉じ込めと、経路データを使用して中間軸を規定する能力と、拡張および圧縮の特性とを含む。
水平平面内の横方向変形が略水平方向の中間軸を有する経路から与えられるべき場合、経路の非水平部分において隣接している剛体の個数は、動きを許容するために十分でなければならない。たとえば、各区間(区間は、「ジグ」または「ザグ」である)が1つの剛体に限定され、ジョイントが機械的にねじることができず、ジョイントが非常に短く、ジグザグ状経路は、この経路の平面から外へ容易に変形され得ない。しかし、レグ1本当たりに2個以上の剛体が許される場合、ジグザグ状経路は、変形され得る。変形は、ジョイントを延長することによってさらに実現可能にされ、ジョイントの延長は、ねじれ剛性を著しく低下させることなく行われ得る。
本開示に記載された形は、非直線状であり、軸方向拡張、圧縮、および横方向変形することができる能力があるに違いない。略直線状経路を辿り、経路と略同じ長さの中間軸を有する従来技術のSAAおよび傾斜計の幾何学的形状は、本開示から除外される。本開示において、中間軸は、「仮想」または「想像上」の、通常は、軸方向に拡張可能および圧縮可能である直線状(非循環的)アレイの経路を記述する役割を担う。
本説明において、「リボン」は、長く、適度の幅と薄い厚さとを有するため、1自由度で曲がり、1自由度で機械的にねじれるが、これの平面から外へ曲がることができない矩形固体を指す。一例は、平坦なプラスチック定規であろう。本発明のため、好ましいリボンは、センサおよび補助的な回路が表面と層間とに実装されている可撓性回路基板であろう。MEMS加速度計のような剛体が回路基板に実装された場合、これらの剛体は、これらの位置に曲げおよびねじれの不連続性を生み出すものであり、その結果、回路基板は、本質的に、剛体間の可撓性ジョイントによって連結されている剛体の組である。
本明細書において言及されているように、用語「傾斜」は、「姿勢」と同義である。本説明において関心のある傾斜は、ロール、ピッチ、およびヨーである。鉛直円筒剛体は、鉛直(Z)軸周りにローリングし、左右(X)平面内でピッチングし、上下(Y)平面内でヨーイングする(これらの方位角平面は、単なる例であり、直交する垂直平面を指定することができる)。
一般的には、非直線状経路を辿り、中間軸を循環的に取り囲む剛体のアレイが記載されている。剛体の一部または全部は、少なくとも1自由度(DOF)で傾斜を測定するセンサと嵌め合わされる。通常は全ての剛体がセンサと嵌め合わされるであろうが、場合によっては、「空の」剛体が、隣接する「充満した」剛体からの測定値に基づいて、設置の幾何学的形状から予測され得る傾斜を有することが分かっている場合、一部を除外することが可能である。
剛体間のジョイントは、これらが2自由度の曲げ−曲げ蝶番として、または、(ジョイントが曲げの1自由度および機械的ねじれの1自由度において可撓性を有する)リボンジョイントの場合、いつでも点の周りに回転する2自由度曲げ−ねじれ「蝶番」としてモデル化され得るように定義される。このようにして、これらの循環アレイのための数学的モデルは、頂点で集まるポリラインである。簡単に言えば、ジョイントでの平行移動は、望ましい角度逸脱の範囲に亘って許されない、という意味である。この条件は、ジョイントがジョイント長の全体を通じて単調かつ一定である曲げおよび/またはねじれを有するという制約の中に具現化される。このことは、ほとんどの短く可撓性ジョイント、より長く、さらにより堅いジョイント、および、螺旋形状であるように拘束されたより一層長いジョイントに当てはまる。螺旋は、一定の曲げおよび数学的ねじれを有する。非常に大きい角度変形に対して、蝶番の前提は、いくらかの不正確さをもたらすものである。これは、角度の関数として蝶番点を僅かに動かすためにアルゴリズムを使用して訂正され得る。
本発明は、中間軸を「取り囲む」循環経路を記述するために役立つだけではなく、線形計器からのデータと比較する目的のため、表面測定を線形(「直線状」または非円筒状)測定に縮小するのにも有用である概念的な曲線である「中間軸」を含む。多角形に関連する「中間軸」の数学的定義が存在する。ここでの概念は、類似するが、循環経路が多角形ではないので、本発明の定義は、多角形の定義と直ちに同一であるということはない。本発明の中間軸を見つけるアルゴリズムが本明細書において与えられるが、排他的ではない。中間軸は、ここでは、前述のとおり、コンバージェンスの装置であるため、他の方法が使用されることがある。
本発明の非直線状循環経路は、中間軸に沿った拡張または圧縮を可能にする。可撓性を有する管が剛体およびジョイントを格納するために使用される場合、経路の曲率は、湾曲した管の内部に剛体を「きちんと張る」またはそうでなければ固定する手段を提供することができ、膨張するジョイントの使用を避ける。軸方向圧縮下で、円筒形状は、横方向に膨張するものなので、湾曲した経路は、剛体をケース入りの、もしくは、ケースなしのボアホール、トンネル、またはシャフトの内面にきちんと張るまたは固定することも可能にする。
MEMS加速度計の余弦応答のため、各加速度計は、特有の傾斜角度範囲に対する傾斜に最大応答を有する。傾斜1度当たりの応答、すなわち電圧変化は、余弦形状出力の微分から見出され得る。応答は、傾斜角度の負の正弦であるので、加速度計の応答曲線が余弦曲線の「零交差」に近接しているとき、絶対値が最大である。零交差の±60度での応答は、50%減衰させられ、±60度を超える角度に対して急速に減少し、零交差からの90度の逸脱で実質的に役に立たなくなる。それ故に、様々な軸を有するセンサが剛体の内部で利用できる場合、大抵、最大応答を有するセンサが測定された傾斜値を提供するために選択される。アレイの長さに沿って、または、経時的に広範囲の角度を経る循環アレイのため、様々な加速度計が様々な時点に、または、アレイに沿った様々な位置で使用されることがある。場合によっては、アルゴリズムが単一の傾斜のため2台以上のセンサを使用して傾斜の最適値を取得するために使用される。3本全ての軸(X、Y、およびZ)にMEMS加速度計が装備された場合、これらの3台のセンサを含んでいる剛体は、全球範囲に亘って正確な動的加速度、および、重力ベクトルの直ぐ周りの回転を除いて全球範囲に亘って静的(重力測定)加速度を提供することができる。
ばねサスペンション式質量の慣性によって静的な傾斜と共に動的な振動に応答するMEMS加速度計が入手可能である。このようにして、MEMS加速度計を格納するアレイは、振動と共に形状を測定するために適合させられ得る。
MEMS加速度計は、1台ずつが軸(たとえば、X、Y、またはZ)に沿って測定する最大3台の直交した加速度計を格納する剛体である「パッケージ」の中の集積回路として入手可能である。3軸加速度計(3本の直交する軸を有する加速度計)において、質量は、これらの軸のうち2本によって分担されることがある。質量の位置は、電荷を伝達するフィンガー部を相互嵌合することによってMEMSの内側で測定される。パッケージは、剛体として直接的に使用され得る、または、剛性管またはボックスのような別の剛体の内部にしっかり実装され得る。複数の1軸もしくは2軸MEMSは、剛体の内部に実装され得る。剛体の内部の位置は、剛体の全ての部分が同じように傾斜するので静的な傾斜測定に重要ではない。MEMS加速度計の典型的な寸法は、1×4×4mmである。
MEMS加速度計の余弦応答のため、各加速度計は、特有の傾斜角度範囲に対する傾斜に最大応答を有する。傾斜1度当たりの応答、すなわち電圧変化は、余弦形状出力の微分から見出され得る。応答は、傾斜角度の負の正弦であるので、加速度計の応答曲線が余弦曲線の「零交差」に近接しているとき、絶対値が最大である。零交差の±60度での応答は、50%減衰させられ、±60度を超える角度に対して急速に減少し、零交差からの90度の逸脱で実質的に役に立たなくなる。それ故に、様々な軸を有するセンサが剛体の内部で利用できる場合、大抵、最大応答を有するセンサが測定された傾斜値を提供するために選択される。アレイの長さに沿って、または、経時的に広範囲の角度を経る循環アレイのため、様々な加速度計が様々な時点に、または、アレイに沿った様々な位置で使用されることがある。場合によっては、アルゴリズムが単一の傾斜のため2台以上のセンサを使用して傾斜の最適値を取得するために使用される。3本全ての軸(X、Y、およびZ)にMEMS加速度計が装備された場合、これらの3台のセンサを含んでいる剛体は、全球範囲に亘って正確な動的加速度、および、重力ベクトルの直ぐ周りの回転を除いて全球範囲に亘って静的(重力測定)加速度を提供することができる。
傾斜からの形状の計算は、従来技術により公知である。概して、可撓性ジョイントによって分離された剛体のアレイは、ポリライン(頂点で集まる線セグメント)として描写される可能性があり、これらの頂点は、ジョイント中心を表現する。線セグメントの長さは、通常、アレイが直線状であるとき、ジョイント中心間距離であると見なされる。Z方向に延び、XおよびY方向で曲がる鉛直アレイに対して、XおよびY傾斜センサは、剛体の全体的な傾斜を感知するために十分である。Zセンサは、アレイが「逆さま」であるか否かを報告するためだけに必要とされる。1DOFの曲げおよび1DOFの機械的ねじり、もしくは、ねじれなしの2DOFの曲げのいずれかを有するようにジョイントを制約することが本質的である。または、WCS内部におけるXセンサおよびYセンサの方位角は、未知であろう。ジョイントが制約されると、計算のための基準端部から遠く離れているとしても、X傾斜およびY傾斜を解法し、これらの方位角(コンパス)方向を知ることが可能である。傾斜計システムにおける制約は、傾斜計ケーシング内の溝によって与えられる。傾斜計の剛体は、溝の中に嵌まるホイールを有する。SAAのため、ジョイントは、ねじれを無視したままにするために構築されるが、2DOFの曲げを許し、SAAのリボン形状の形のため、ジョイントは、1DOFの曲げおよび1DOFのねじれを有する。この制約は、X傾斜およびY傾斜に基づいて、前のセグメントと相対的な各セグメントの2DOF姿勢の計算を可能にする。
水平の従来技術の直線状アレイの形状の計算は、アレイの経路を格納している鉛直平面の範囲内の形状に限定される。Zセンサだけが必要とされる。
アレイのための循環経路の導入は、センサがより幅広い角度をなすことができ、それによって、直線アレイの欠陥を回避するので、非常に多数のさらなる測定可能性を可能にする。たとえば、水平方向直線アレイは、重力ベクトルの周りだけを回転するセンサの動きを重力測定できない。用語「回転」は、本明細書において、典型的に非常にゆっくりした回転を意味するものと理解され、重量測定傾斜計は、種類を問わずに、位置測定を行うために動的加速度の時間積分に頼ることがない。重力ベクトル周りの回転は、重力がこの重力ベクトルの向きの周りに対称であるため、全く出力を生じない。これは、水平平面内の水平方向直線アレイのいかなる動きの測定も妨げる。換言すると、「ヨーイング」は、測定され得ない。ヨーイングの問題は、ヨーイングに起因する加速度の非常に小さい変化のため、水平から約30度まで持続するが、とはいえ、極端な測定が行われる場合、いくつかの測定は、水平からまさに10度以下までの浅い角度で可能である。しかし、以下に明らかにされるように、鉛直平面内の循環アレイの波状形は、水平平面内の動きを測定する手段を提供する。
アレイの循環経路によって可能にされた測定の別の例は、横方向変形(水平平面内の剪断)と併せて、沈下(鉛直方向圧縮)、鉛直方向膨張の同時測定である。これは、軸方向に膨張もしくは圧縮し、傾斜測定によって完全に定義される循環経路の能力によって可能にされる。
循環経路は、軸方向圧縮時に横方向膨張に起因して、格納面の内部で剛体を固定するより良い手段をさらに生成する可能性がある。
循環経路は、格納面内により多くの余裕を与える可能性もある。たとえば、円筒ボアホールまたはケーシングの内面上の螺旋アレイは、それでもなお、ケーシングの形状を測定する可能性がある。ケーシングは、確実な嵌め合いが損なわれることなく、より大きくなる可能性があるので、螺旋を同様に保持することがあるより多くの余裕がケーシングの内部に格納されることがある。余分なスペースは、岩または他の堅い物体の衝突に起因した格納面の急激な変形を収容するために使用され得る。これは、監視用アレイのより長い耐用期間をもたらし、より多くの耐用期間後にアレイの抜き出しを可能にする。
図1は、リールからボアホールの中へ繰り出された従来技術のSAAを示す。SAAは、ジョイント2によって接合された剛体1を有する。典型的に、リール3は、SAAのセグメント長さ(剛体長さ)を収容するために作られた多角形形状をしている。この場合、五角形リールが示されている。ボアホール4は、土壌の中でケース入りのホールもしくはケースなしのホールである可能性があり、または、パイプ、コンクリートもしくは土堰堤のような土木構造物の中へ穿設される可能性がある。SAAは、水平に側溝内にある水平方向ケーシングの直線状導管の中へ設置される可能性もある。SAAは、通常はプラスチックケーシングの内部に保持されたトンネル内のほぼ円弧の中にある可能性もある。各セグメントは、傾斜を測定し、場合によっては、振動を測定するため使用できる3台の加速度計を格納する。
従来技術のSAAは、余分な構造物を含まない形状に成形され得る完全に校正された測定計器であり、この形状を表現するデータを提供するものである。全てのデータは、アレイ内のマイクロプロセッサおよびアナログ・ディジタル変換器の使用によって単一のディジタルケーブルで計器から出る。セグメントが約±60度の範囲の鉛直向きであるとき、3次元形状は、測定された傾斜と、剛体および剛体間のジョイントの既知長さとから決定される可能性がある。セグメントが約±60度の範囲でほとんど水平であるとき、水平の±30度の範囲のXデータおよびYデータの劣化のため、ソフトウェアが鉛直平面内の2次元データだけを提供するために使用される。ほとんど水平のセンシングのため、主にZ傾斜センサが使用される(セグメントが水平であるとき最大応答を有するセンサ)。名目上の3次元データ測定範囲と2次元測定範囲とは、3次元モードまたは2次元モードのいずれかでソフトウェアから離れるためにより利便性が高いというだけの理由で重なり合う。両方のモードは、これらの±60度範囲を越えると精度が急激に下がる。
用語「非水平」または「略鉛直」は、本明細書において、セグメントから3次元姿勢および位置データの決定を可能にするために十分に鉛直であるセグメントを意味するために使用される。用語「非鉛直」または「略水平」は、本明細書において、他のセグメントから独立して、2次元測定だけを可能にするセグメントを意味するために使用される。単独セグメントからの2次元測定に適したセグメントは、出力がこれらの略水平剛体のロール角度から独立しているZ傾斜センサの使用だけを必要とする。3次元測定に適したセグメント(非水平セグメント)は、アレイの経路の周りの剛体のロール角度の既知の整列を必要とするので、XセンサおよびYセンサは、アレイの経路の周りに整列させられるであろう。
用語「略水平」、「非鉛直」、「略鉛直」、および「非水平」は、従来技術のSAAの限界が鉛直から±60度の広い範囲にある3次元センシングおよび水平の±60度の範囲にある2次元計算であるという文脈で、平面の傾斜を記述するためにも本説明において使用される。これらは、厳格な制限ではなく、これらの限界を越えた場合、精度が(角度の余弦として)急激に低下し始めるという限界である。
本発明のため、拡張変形および横方向変形を共に収容するために非直線状経路を使用するという概念は、3次元螺旋を使用して一般的な形式で説明することができる。
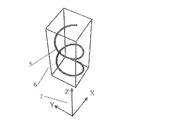
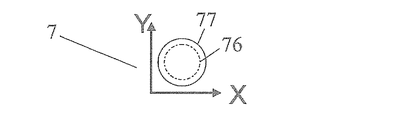
図2は、境界ボックス6の内部に3次元図で螺旋5を示す。「境界ボックス」は、単に可視化の補助である。X軸、Y軸、Z軸7の組は、螺旋の座標系を規定する。図3は、2次元軸7の組を用いた螺旋5および境界ボックス6のXZ立面図である。図4は、異なる2次元軸7の組を用いた同じ螺旋5および境界ボックス6のYZ立面図である。
図5は、螺旋の1巻きを形成するために円筒に巻き上げられ得る三角形表面(「生成三角形」)8を示す。三角形の高さ9は、2πcである。三角形の底辺10は、2πrである。同様に、このように形成された螺旋の1巻きの高さ(「ピッチ」)は、2πcであろう。「c」は、「ピッチ高さファクタ」である。螺旋の境界を定める円筒の周囲(円筒は図示されない)は、2πrである。
螺旋のパラメトリック方程式は、
(1) x=rcos(p)
(2) y=rsin(p)
(3) z=cp
であり、式中、rは、半径であり、pは、0から2πまで変わる。2つの立面図は、式(1)よび(2)における余弦関数および正弦関数から生じる。
螺旋の「ピッチ角度」であるαは、
(4) tan(α)=c/r
として定義できる。
螺旋は、以下の一定の曲率およびねじれ
(5) k=r/(r2+c2)
(6) t=c/(r2+c2)
を有し、式中、kは、曲率であり、tは、ねじれである。
螺旋は、これの長さに沿って一定の曲げおよびねじれを有する数学的な空間曲線である。空間曲線の数学的ねじれは、管状固体のねじり剪断によって引き起こされる機械的なねじれと必ずしも同じではないことに注意することが重要である。空間曲線は厚さがないので、これの長さに沿って機械的ねじり(torsion)(機械的ねじれ(twist))を有する可能性がない。ゴム製ロッドのような可撓性を有する円筒固体は、螺旋に形成することができ、顕著な機械的ねじれを有することがある。直線状ロッドは、機械的ねじれを有することがあるが、直線状ロッドの中心軸が直線であるため、決して数学的ねじれを有する可能性がない。螺旋状ロッドの場合、機械的ねじれの大きさおよび向きは、ロッド(空間曲線)の中心の経路に対して計算された数学的ねじれとは全く異なることがある。本説明において、屈曲部またはジョイントにねじれがない、または、ねじれを許容しない、と言うとき、これは、機械的ねじれのことを指している。機械的ねじれは、形状(たとえば、所与の直径およびピッチを有する螺旋の数学的ねじれ)によって完全に決定される。機械的ねじれは、材料のねじり剛性によって、許される、または許されない。ねじり剛性は、管の端部のようなサンプルの端部が、このサンプルが直線状であるとき、端部と端部との間に印加された所与のモーメントに対して回転させられ得る量である。
ねじり剛性は、材料の剛性のように、剛性が略線形であり、ねじりによって発生されたねじれがこのねじりが取り除かれた後に弾性的に復元する印加トルクの範囲内で適用される。ねじり剛性管(たとえば、ロッド、ホースなど)が螺旋形状に成形されるとき、螺旋形(厚さのない空間曲線)の数学的ねじれは、管にねじりを加えることになるであろう。本説明において、このねじりは、加えられることが許され、管のねじり自由度の弾性限界の範囲で保たれることが前提とされている。軸方向長さ当たりの巻き数が少ない螺旋の場合、ねじりは、非常に小さく、螺旋上のセンサの方位角整列に極めて僅かな影響しか与えないであろう。たとえば、半径50mmおよび鉛直からのピッチ角度10度の螺旋は、傾斜計ケーシングに対する典型的な仕様である長さ3m当たり0.33度のねじれを有するであろう。実際的な言い回しでは、螺旋を形成するときにアレイの機械的ねじりを最小限に保つことは、螺旋が制限もしくは干渉なしで形成されるときに、管が機械的ねじれを有することを許容することになる。ピッチ角度がより一層水平であり、その結果、より大きい数学的ねじれが存在する場合、より大きいねじりが管に加えられるであろう。システムは、このねじりを管の弾性限界内に保つように設計されなければならない。傾斜センサは、ねじれの量を読み取るために使用されることが可能であり、螺旋の形状を計算するために使用される数学は、適切に調整され得る。センサによるねじれの読み取りは、剛体がより一層水平になるのにつれて、より一層正確になる。これは、剛体の「ロール」角度であるatan(ax/ay)におけるaxおよびayの両方の大きさが増加する結果であり、axおよびayは、剛体が鉛直であるとき、傾斜に最も高感度であるセンサの静的なX加速度およびY加速度である。
したがって、本明細書において、屈曲部またはジョイントが「ねじることができない」、「ねじれに抵抗する」、「ねじれなし」、「ねじり剛性がある」、または「機械的ねじりをもたない」、または「ねじり耐性がある」、または「高いねじり剛性がある」と言うとき、ねじりが弾性限界の範囲にあることと、ねじれが無視できること、または、既知の幾何学的形状およびロール角度の測定値を使用して訂正可能であることのいずれかを意味している。好ましくは、数学的ねじれは、無視できる状態に保たれ、このことは、通常はアレイの形状に対して好ましい幾何学的形状を選択することによって実現され得る。
螺旋に沿った経路長さ(弧長さ)は、生成三角形の斜辺に対応する。螺旋の単一の巻きに対して、
(8) S=2πsqrt(r2+c2)
であり、式中、Sは、経路長さであり、「sqrt」は、平方根演算子である。本説明は、一定の経路長さを有する螺旋に関連しているが、なぜならば、これらは、波状形であるときでも常に同じ端部間長さを有する剛体およびジョイントの連結を表現するためである。
次に、螺旋が経路長さを変えずに(ばねのように作用する)圧縮または拡張を加えられる物体である場合、螺旋の形状が考慮され得る。このようにして、Sは、定数であり、したがって、
(9) A=sqrt(r2+c2)
は、同様に定数である。
螺旋の巻き数を一定に保ったまま螺旋高さの関数として半径について解くことができるので、螺旋の端部は、生成円筒形の周囲の周りでいつでも同じ方位角にある。
(10) r2=A/(1+(tan(α))2)
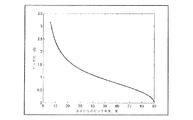
図6は、螺旋の圧縮から生じるピッチ角度αの関数としてピッチ比r/cを示す。この線の勾配が重要である。この勾配は、螺旋が軸方向に圧縮されたときに横方向に膨張する量に関係する。この勾配は、ピッチ高さファクタのパーセント変化で割り算された半径のパーセント変化を示すために正規化され得る。このパーセント変化の比が図7に示される。
図7における比−dr(%)/dc(%)(「螺旋歪み比」)は、ポアソン比を定義するために使用される横断歪みと軸方向歪みとの比に非常に類似している。ポアソン比は、固体材料の横方向歪みを軸方向歪みに関係付ける。螺旋歪み比は、たとえば、螺旋状センサアレイがケースなしのボアホールの中に配置され、ボアホールを取り囲む土壌の軸方向圧縮と共にアレイを動かすことが望ましいときに関連性がある。循環アレイの直径が軸方向圧縮時に過剰に膨張することは、ボアホールがポアソン比の限界を越えて膨張することができないので、必要ではない。図7の上記螺旋歪み比は、土壌と一体となった運動を許容する螺旋のピッチを設計するために使用され得る。
図7の螺旋歪み比は、螺旋状アレイをボアホールケーシングのような剛性円筒の内部に固定することにも関連性がある。螺旋の直径は、鉛直ケーシング内の重力を原因とするような軸方向圧縮時に膨張するものであることが分かる。この膨張は、ケーシングによって妨げられることになるが、螺旋状アレイとケーシングとの間に強い接触力を生じることになる。これは、軸方向圧縮時に波状形のまたはジグザグのアレイが横方向に膨張する2次元の場合にも当てはまる。図7において、比1.0が示され(破線11)、これは、ピッチ角度45度(破線12)に対して現れる。この角度で、たとえば、長さ100mおよび直径100mmの螺旋の1mmずつの軸方向圧縮は、この螺旋の直径を1mmずつ膨張させることになる。
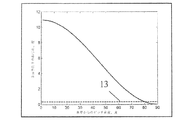
図8は、ピッチ角度に対してプロットされた、半径50mmの螺旋の3mのねじれを示す。ピッチ角度約80度で、3m当たりのねじれは、傾斜計ケーシングの典型的な仕様である、ケーシングの長さ3m当たり0.33度(破線13)とほぼ同じである。80度以上は、長さ0.5m以上の剛体セグメントに対する典型的なピッチ角度である。たとえば、84度は、1:10(距離対上昇)の勾配であり、これは、一方の端部からもう一方の端部まで50mm傾斜した500mmの剛体を表現するものであり、この勾配は、剛体が非常に狭い場合、狭いホールだけで実現され得る。ケースなしのボアホールにおける沈下を測定するため、3mのボアホールに対して5〜6度のねじれを意味する40度以下のピッチ角度が必要とされる。これは、深いホールにおける傾斜読み取りの方位角にかなりの程度で影響を与えるものであるが、螺旋のピッチ角度は、剛体の傾斜測定値から常に既知であることがあるので訂正され得る。ホールの直径を大きくすることは、1巻き当たりのねじれを小さくする効果があり、曲線の形状は同じままである。
軸方向圧縮に応答した螺旋の横方向膨張は、XZ立面ビューおよびYZ立面ビューとXY平面ビュー(それぞれ、符号13,14,15)とを含む図9に示される。これらの図は、元の螺旋16と軸方向に圧縮された螺旋17とを示す。XY平面ビュー15は、圧縮に起因した直径の増大を最も明瞭に示す。曲線は、螺旋方程式(1)〜(9)を使用して計算された。
土壌の鉛直沈下(鉛直軸における圧縮)は、ケースなしのボアホール内に取り付けられた螺旋状アレイによって測定され得る。一般的な場合、鉛直沈下は、ボアホールに沿った仰角と均一ではない。しかし、螺旋は、1つずつの特有の仰角での沈下の量に従って、螺旋のピッチが螺旋の長さに沿って変化し得る十分な自由度を有する。沈下(螺旋の軸方向圧縮)のある螺旋の膨張は、螺旋が土壌にロックされた状態を保つことができる外向きの力を生じるであろう。最低限、膨張は、土壌のポアソン比に一致すべきである。多くの場合、膨張は、剛体が土壌をある程度まで押し込む傾向があるので、ポアソン比によって決定付けられるより大きくなる可能性がある。非常に小さい範囲の沈下に対して、盛り土が土壌の圧縮率と一致するように設計されている場合、グラウトまたは圧縮性盛り土がボアホール内の余分なスペースを埋めるために使用されることがある。膨張土に対して、螺旋歪み比は、膨張中にボアホールとの接触が維持されるように、ポアソン比より大きくすべきである。
類似する条件が中間軸を取り囲む非螺旋非直線状の円筒状センサアレイに課されることがある。このより一般的な場合のいずれの2つのセグメントも螺旋歪み比に類似している歪み比を有する可能性があり、そうすることにより、2つのセグメントの横方向広がりは、軸方向広がりに関係付けられ、土壌のポアソン比に一致させられるべきである。したがって、螺旋の例がここでは記載されているが、これは、中間軸を取り囲む非直線状センサアレイのより一般的な場合にも拡張されることがある。
中間軸および中間軸の計算は、本説明において以下でより詳しく検討される。さしあたり、中間軸は、螺旋の中心線(生成円筒の中心線)であると考えれば足りる。
土壌が沈下するのにつれて、螺旋は、一般的に様々な仰角で様々な量によって鉛直向きに圧縮することになる。中間軸は、短くなり、中間軸に沿った「第2の頂点」(循環アレイのジョイント中心を表現する「第1の頂点」の投影)は、各仰角における沈下に従って仰角を変えるであろう。
螺旋の横方向変形は、中間軸の位置にある現実の直線状SAAの変形に非常に類似したやり方で螺旋の計算中間軸の変形という結果をもたらすであろう。中間軸は、鉛直沈下(軸方向圧縮)によって、長さを除いて影響を受けないので、軸方向圧縮および横方向変形の測定は、どちらも同じアレイによって行われ、相互に独立したデータを提供する可能性がある。
図10は、線セグメント18が剛体の軸を表現し、円19が経路の関節接合を可能にするジョイントを表現しているジグザグ経路を示す。この経路は、区間20で構成され、この場合、1区間当たり2つの剛体がある(たとえば、区間20は、符号「20」に最も近い符号19が付けられた2つの円形の間に延びる)。概して、非ねじれ(ねじり剛性のある)ジョイントを有するジグザグの各区間、すなわち、平面内のジグザグは、ジョイントが短い場合、少なくとも2つの剛体を有するべきであり、または、ジグザクは、このジグザグの平面から外へ自由に曲がらないことがある。より長いジョイントは、各区間内に単一のセグメントを可能にすることができる。短いジョイントに伴う困難さは、経路の境界での鋭いジョイント角度と組み合わされたジョイントの非ねじれ特性に起因する。1自由度(1DOF)の曲げおよび1DOFのねじれを許容するリボンの場合、1区間当たりちょうと1つの剛体があれば足りる可能性がある。
図11は、空間データの正弦波21を示す。これは、振幅対時間ではなく、位置データX対Z、または、Y対Zを表現する。概して、どんなに不規則であろうとも、経路は、周波数、振幅、および位相が異なる正弦波の系列に分解され得る。元の経路は、系列から再構成され得るものであり、すなわち、このプロセスは、可逆的である。この空間周波数内容は、通常は、多くの場合に高速フーリエ変換(FFT)アルゴリズムを使用して、フーリエ級数として計算される。
図12は、セグメント化された、もしくは、滑らかな経路、または、滑らかな経路自体の空間周波数成分を表現することがあり得る正弦波を示す。これは、Zにおいて拡張する螺旋からのXZデータまたはYZデータを表現することがあり得る。XZデータおよびYZデータは、たとえば、図9のビュー13,14のような異なった直交する「ビュー」からのデータであると考えられ得る。正弦波の中間軸22は、様々な演算によって見つけられ得る。一例である「中間軸アルゴリズム」は、経路の第1の点23から、第1の点と90度位相がずれている経路の第2の点24まで延びる線セグメントを描く。第1の点23および24は、円形でマークされている。これらのセグメントの中間点25(正方形記号)は、より密集した線セグメントが使用されるような限界において、滑らかに湾曲し中間軸22になるポリライン(直線セグメントからなる曲線)を描くために使用され得る。
中間軸は、概して、これの生成波形の全長に一致するように両端部で多少拡張されるべきである。連続的に平均化されたデータを外挿するために広く使用されるアルゴリズムが使用されることがある。多くの場合、波形の既知の長さに基づいて端線を定義し、中間軸の最も外側の勾配で中間軸を端線まで継続することだけで十分であろう。
図13は、ランプ状空間パルス(点線26)を加えることにより変形された正弦波21を示す。歪んだ正弦波21は、経路の長軸に対して横方向に(横断して)変形している経路の歪んだ空間周波数成分を表現する。同図は、横方向に変形した螺旋の一方側の直交するビューを表現することもあり得る。図13における中間軸(破線22)は、図12において上述された中間軸アルゴリズムを使用して生成されている。たとえば、位相が90度離された第1の点23および24は、中間点25を有する線セグメントを描くために使用される。全ての中間点が中間軸として使用され得るポリライン(破線22)を規定するために使用される。ランプの「コーナー」付近でのポリライン22と26との間の差は、中間軸を生成するためにより多くの点23および24を使用することにより縮小され得る。
中間軸からのデータは、アレイが中間軸を辿る場合にSAAのような非循環的な従来のアレイからのデータが使用されるのと同じやり方で、循環経路(ジグザグ、波状形、螺旋状)の変形を監視し、評価するために使用され得る。
図14は、線セグメント18および円19が剛体軸および第1の頂点におけるこれらの交点をそれぞれに表現しているセグメント化された経路を示す。セグメント化された経路は、「目標」中間軸21、すなわち、正弦波の「中線」を形成するために使用された正弦波21(点々)として示された主空間周波数内容を有する。図12の中間軸アルゴリズムは、第1の中間軸(正方形記号27)を決定するために第1の頂点だけに適用されている。経路のセグメント化のため、目標中間軸21(直線)からの第1の中間軸のいくらかの偏差が存在するということが分かる。しかしながら、再び線セグメントの端部として(今回は、第1の中間軸の)頂点だけを使用する第1の中間軸点27への中間軸アルゴリズムの第2の適用は、ほとんど完全に直線状の第2の中間軸(「+」記号28)をもたらす。これは、最終的な中間軸に収束するための反復の例である。
中間軸アルゴリズム、または、これと同様の演算は、どんな直交するビューにおいても、各周波数および各ビューにおいて複数の中間軸を決定するために、どの経路の個別の空間周波数成分にも適用され得る。中間軸は、その後、点で平均化することにより、または、その他の類似する演算により、唯一の3次元中間軸に組み合わされ得る。
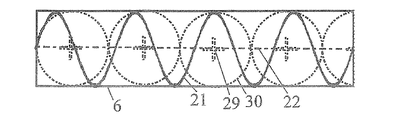
いくつかの循環経路のための中間軸を決定する代替的な手段は、境界多角形または曲線で波形を取り囲み、次に、多角形中間軸アルゴリズムを使用して多角形の中間軸を見つけることである。たとえば、2次元において、平面曲線Sの中間軸は、2つ以上の点で曲線Sに接する円の中心の軌跡であり、全てのこのような円は、Sの中に格納されている。図15は、矩形多角形6によって境界が付けられた正弦波21を示す。多角形6に接した円30の中心は、中間軸22を規定する。
このように、循環経路のいずれの形状に対しても、最大で3次元において、いつでも中間軸が見つけられることがあり得る。
中間軸は、経路の大まかな形状を記述するため便利である。中間軸は、たとえば、同じ螺旋状経路計器を使って沈下と横方向変形とを測定しているときのように、循環経路が中間軸の大まかな向きに沿って圧縮または拡張されているときであっても形状の「中心」をさらに描写する。しかしながら、沈下が要因ではなく、変形測定値だけが求められる(出発形状の描写がない)設備において、中間軸は、データ集合の一部として必要とされないことがある。これらの場合、変形データは、「出発螺旋」と比べて、螺旋の形状の差から計算されることがあり得る。グラフ上で、出発螺旋は、開始線として変形グラフの中に現れ、変形は、結果として、線の横方向移動を生じさせるであろう。これは、掘削および設置の誤差に起因して最初の形状が一般に直線でないとしても、最初の形状が常に直線として描写され、その後、時間と共に変形する従来技術の傾斜計またはSAAの変形グラフとは少し違っている。
ジョイント中心は、「第1の頂点」として円筒状経路のグラフ表現に沿って表現される。「第2の頂点」は、経路上の第1の頂点の中間軸への投影である。投影は、中間軸に対する垂線に沿う。垂線は、第1および第2の頂点を格納している。これらの「間接的な」第2の頂点は、この場合、計器経路に沿ったジョイント中心の位置の表現として、「直接的な」頂点が従来技術の傾斜計もしくはSAA計器のグラフィック表現上で使用されることがあるのと同じ形式で使用され得るであろう。
円形または円形の一部分のような弧の場合、多少の検討を必要とする。弧は、コンバージェンスを測定するときに重要である。トンネルのコンバージェンスは、円筒状トンネルの断面の周りの円形(または弧)の中で剛体のアレイを延ばすことにより、従来技術の屈曲センサのアレイを使用して実行され得る。曲げ(または傾斜センサから得られた曲げ)は、弧または円形によって規定された平面内で、変形後に円形または弧の形状を見つけるために使用される。この場合、円形のための中間軸を定義するために円形の方程式(x=rcos(p)およびy=rsin(p))を使用したくなることがある。しかし、これは、螺旋の中間軸を定義することに類似していない。螺旋は、z方向に拡張するので、螺旋の各ビューは、z方向に拡張する正弦波によって描写され得る。円形の場合、正弦波および余弦波の定義は、平面内で行われるので、中間軸は、点になるであろう。中間軸は、本発明の文脈において単に線になるだけであり、この平面から外れる弧の動きが許され、測定される。この場合、z方向に拡張し、螺旋の成分であると見なされることがあり得るアレイの非平面状形状の空間周波数成分を見つけることができる。
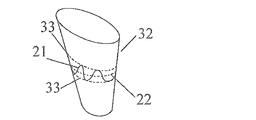
コンバージェンス測定の従来技術において以前に利用できたデータより多くのデータが水平トンネル(または鉛直もしくは傾斜したシャフト)の周囲に沿って別の円形経路を波状形状にする(またはジグザグの形にする)ことによって取得され得る。水平トンネル31の一例は、図16に示され、鉛直シャフト32の一例は、図17に示される。図16および図17の両方において、波状形の経路21は、2つの円曲線33によって境界が定められる。中間軸アルゴリズムは、トンネルまたはシャフトの周囲の周りに延び、その結果、弧形状または円形状の中間軸22を生じる波状形の経路に適用され得る。円曲線33によって規定されたバンド形状の表面は、中間軸がほぼバンドの中心にある経路を格納している。全てが経路の剛体内の傾斜センサから得られた新しいデータは、中間軸の平面の範囲で、この中間軸の平面の中心に向かう、および、中心から遠ざかる中間軸の動きに関する従来技術のデータと共に、バンドのねじれとトンネルもしくはシャフトの軸方向の変形とを定量化するために使用され得る。データは、3次元におけるバンド表面の変形を完全に記述する。不完全であるとしても、バンドのさらに一様な拡張または収縮が直径の関数である波状形の波長および振幅の変化を通して検出され得る。不完全性は、水平トンネルの頂部および底部のような波状形の経路のうち略水平である一部分から生じる。これらの部分には、重力ベクトルの周りに回転するセンサの傾斜の変化は、ほとんどない、または、全くない。しかしながら、バンドの残りの部分は、3次元で感知されるので、波長データが依然として役に立つ。これが特にこうなるのは、バンドの大半に対する波長が変化し、頂部もしくは底部の局所コンバージェンスのようなその他の変形が起こらない場合、バンドの一様な拡張もしくは収縮が起こっている可能性が最も高い、と推論されることがあるためである。そして、不完全性は、非水平状のシャフトに関連性がない。
トンネルまたはシャフト壁上の波状形の別の利点は、剛体を格納する管の内側での剛体の嵌め合いの改良である。従来技術のSAAは、通常は、剛体を形成する剛性管より僅かに大きい可撓性導管の中に設置される。剛体間のジョイントは、SAAの軸方向圧縮下で膨張するように設計され、しかしながら、これは、格納管の中で剛体を完全に固定することが稀である。可撓性導管が正確な曲率を有する弧の中にある場合、剛体が剛体の端部および中間で触れて、剛体を完全に固定する。しかしながら、この曲率は、極めて稀にトンネルまたはシャフト表面の曲率である。波状形は、可撓性を有する管内で剛体を固定する別の自由度を許容する。剛体の長さは、トンネル曲率で可撓性導管内の緩い嵌め合いと、バンド形状の表面内の波状形におけるぴったりとした嵌め合いと、を可能にするように設計され得る。波状形は、バンド形状の表面内での剛体の密な3点嵌め合いを生み出すために側面で調整されることがある。少数の標準的な長さの剛体がこのようなシステムを可能にするために、膨張するジョイントの有無を問わずに製造される必要がある。波状形の導管内の剛体の密な嵌め合いは、図18に示される。この場合、密な嵌め合いは、3点34、35、および36で接触する剛体によって定義される。密な嵌め合いは、弧の平面から外れる測定値が望ましくないときでさえ、波状形状にするために十分に理に適っている。
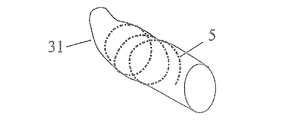
他の経路がトンネルおよびシャフト測定で有用である。水平トンネル内のSAAを用いる殆どのコンバージェンス測定は、SAAを格納する鉛直平面内でのSAAの沈下もしくは上昇を監視するために、水平SAAを用いて頂部または床部を監視することと併せて行われる。複数のコンバージェンス弧もしくは円形状の、長い水平SAAの場合と大差のないデータは、図19に示されるように、螺旋の軸が水平であるトンネルの内面上の螺旋を用いて取得され得る。螺旋5のピッチは、トンネル31の表面内で軸方向線に沿ってデータ点間の間隔を変えるために調整され得る。鉛直シャフトは、このようにして、螺旋の軸が鉛直である状態で、同様に測定され得る。
図20は、トンネル直径の縮小を表すトンネル31および図19の経路5を示す。トンネルおよび螺旋の縮小は、同図において誇張されている。直径の縮小は、螺旋が新しいトンネル形状に追従するときに小さい範囲に亘って感知され得る。しかしながら、これは、波状形によって改良される可能性がある。経路が図18の円形バンドの場合のように波状形状にされるべきである場合、縮小は、より広い範囲に亘って、空間分解能が改善された状態で、円形バンドの場合に測定された他の全てのパラメータと共に測定されることがあり得る。
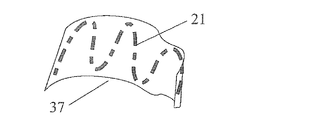
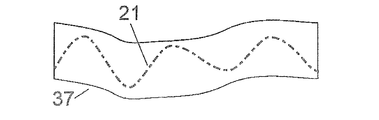
トンネル壁は、略鉛直平面内の波状形のまたはジグザグの循環アレイを使ってさらに測定されることがある。1つのかなり一般的な例が図21に示される。波状形の経路21内の円筒状アレイは、略鉛直面37にある。円筒状アレイは、トンネルの壁のような鉛直壁の測定を表現することがあり得る。トンネルの断面が円形である場合、図21の表面は、水平軸の周りにさらに曲げられるものであり、図22(この場合、ジクザグ状のアレイ38を含む)に示されるように、完全に3次元曲面になる。軸7は、3次元座標系を定義する。
波状形のある鉛直面の測定は、波状形の勾配が非常に小さい(略水平である)波状形の頂部および谷部の近くで、これらの部分が剛体を重力の向き(「重力ベクトル」)の周りに回転させるように曲がる場合、いくつかのデータ点を見逃すことにつながる可能性がある。しかしながら、これらの部分は、トンネル変形が剛体の円筒状アレイの他の部品に完全に伝達されるように、(たとえば、裏当て板に締結することにより)局所的な平面の内部で堅固化される可能性がある。1DOF曲げおよび1DOFねじりに拘束された、リボンに取り付けられた剛体の場合、頂部および谷部における堅固化は、通常は、リボンの機械的制約のために、必要とされないことになる。しかしながら、リボンは、リボンがこのリボンの固有の平面から外へ曲がる能力がないため、いくつかの表面を巧く辿ることができないことがある。概して、リボンは、2DOFにおける曲面を辿ることができず、1DOFの曲げだけが容易に受け入れられる可能性がある。
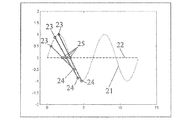
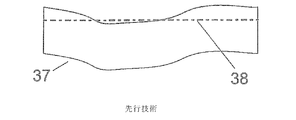
図23は、鉛直面37内の循環アレイの波状形の経路21を示す。この経路は、図24に示されるように鉛直向きに変形することができる。たとえば、経路21と一体になった循環アレイが線路の傍らにある側溝(側溝は、当然ながら埋められている)に設置された場合、側溝の真下にある土壌または層面の浸食が地表面の降下を引き起こすことがあり、この降下は、経路に沿った傾斜の変化のため、固有の平面37内で屈曲している波状形のアレイによって感知されるであろう。それに対して、同じ地表面は、直線状の従来技術のSAAまたは傾斜計38が破線によって指示された図25に示される。従来技術のSAAおよび傾斜計センサは、拡張可能ではないので、SAAまたは傾斜計は、著しい局所的な陥没(沈下)の中へ落下することができず、代わりに、真っ直ぐな状態のままであり、層面の軟弱化の警告を入手できないであろう。
図26の立面図は、経路21が鉛直平面37内にある循環アレイの別の例を示す。経路は、ジグザグ状に示されているが、その上、波状形状にされることがあり得る。線セグメント18は、剛体を表現する。円19は、ジョイントを表現する。この場合、例は、勾配の先端(最低仰角)付近にある埋められた側溝内にある循環アレイの平面である。この平面は、軸7によって示されるようにXZにある。先端土壌の沈下は、18,19,21,37が図26の場合と同じ物体である別の立面図である図27に示されるように、平面内に曲げを引き起こすことがあり得る。この曲げは、循環アレイによって感知されることになる。地滑りの場合のような勾配の動きは、XY軸7によって表されるような平面図である図28に示されるように、鉛直平面37から外れるこの鉛直平面37の弓形の変形を引き起こすことがあり得る。(同図において一致する)経路21および表面37のこの横方向曲げは、同様に感知されるであろう。
鉛直平面内で波状形の、または、ジグザグの循環アレイは、個々のサブアレイがこれの長さに沿って位置の3次元測定を行うために十分に非水平であるいくつかのセグメント(剛体)を含んでいる個別のサブアレイの集まりと見なすことができる。各サブアレイは、これの両端部にある位置基準を隣接した、物理的に接続されたサブアレイに提供する。このようにして、位置は、循環アレイ全体に沿って知られている。図28の例において、ジグザグの全ての区間(たとえば、1つの区間は、図の左から2番目から4番目のセグメントで構成される)は、湾曲し、正確な3次元データを提供するために十分に非水平である。
概して、位置の3次元データを提供するために十分に鉛直向きではないセグメントは、(鉛直平面内の傾斜から)位置の2次元データを提供するものである。このように、3次元形状データは、不完全であるが、それでもなお有用である。
循環アレイの形状は、この循環アレイの部品のうち1つの位置の変化に伴って変化するものである。循環アレイの形状の空間周波数成分の波長は、上記不完全に知られている3次元形状データを改良するために使用され得る循環アレイの3次元形状に関する付加情報を提供する。たとえば、鉛直平面内の波状形が図28の場合のように横方向に膨らまされる場合、この波状形の波長は、波状形の全てのセグメントに対して次第に水平になる傾斜によって表現されるように、増大するであろう。このように、より多くの非水平セグメントと共に水平に向かって動いている略水平のセグメントの少数部分は、妥当な確実性で、同じパターンの動きを裏付けている、と仮定され得る。なお、波長だけでは、同じ波長が膨らみのため線の右側または左に起こる可能性があるので、動きの向きを決定するために十分ではないことに注意を要する。しかしながら、非水平セグメントからのいくつかの付加3次元データと一体となった波長は、向きを決定することができる。
水平平面内で波状形の、または、ジグザグの循環アレイは、同様に有用である。たとえば、図29に示されるように、鉄道の線路の間で波状形の循環アレイ21は、線路39のカントおよびねじれを測定するために使用され得る。循環アレイは、線路間の枕木40に取り付けられ得る。同様のやり方で、土壌の表面で波状形の循環アレイは、線に沿った沈下ではなく、むしろ、表面全体の(正および負の)鉛直沈下を測定するために使用され得る。波状形のアレイ自体は、請求項の「2DOF」曲げの場合に当てはまることが考えることができ、波状形のアレイと線路との組み合わせは、請求項の「1DOF曲げ/1DOFねじれ」の場合(「リボン」の場合)の例であると考えることができる。
水平平面内に波状形の経路を含む構成は、剛体内の1DOF傾斜センサを使って測定されることがある。循環アレイが2DOF曲げを許し、ねじれを許容しないジョイントを有するとき、このようなセンサは、好ましくは、水平方向であるとき、最も感度の高い姿勢になるように方向が定められるべきである。ジョイントが1DOF曲げおよび1DOFねじりを許容する循環アレイが(以下でより詳細に検討される)リボン上にあるとき、これは、同様に理想的な配置であるが、2台のセンサが使用され、センサがリボンの軸に対して45度をなす場合、測定は、同様に完全に有用であろう。これは、様々な目的のため、レール路床上の水平平面を含むリボン上の標準的なセンサの構成の使用を可能にする可能性がある。1DOFセンサを含んでいるリボン形からのデータは、少し注意して取り扱われるべきであり、なぜならば、レール路床の横方向中心の付近にあるセンサは、軌道が曲がるとき期待されるリボンのねじれに対して応答しないからである。センサは、依然として軌道のカントおよびねじれに応答するであろう。しかしながら、レールの近くにあるセンサは、レールの近くにあるリボンの曲げに起因してねじれが存在することなく、レールの曲げに起因した傾斜を測定することになるので、1DOFセンシングを用いるとしても、有用な測定が水平平面内にある循環アレイのあらゆる場合のため利用可能である。この場合、軌道路床の横方向中心の近くにあるセンサは、主としてレールのカントおよびねじれを測定し、レールの近くにあるセンサは、主としてレールの上昇および下降(鉛直平面内の曲げ)を測定する。
鉄道軌道またはその他の水平表面に関して本発明の他の利点は、たとえば、軌道が温度変化に起因して長さを変えるのにつれて軌道と共に動くことを可能にする拡張性を含んでいる。別の利点は、わずか1自由度のセンサを使用する3次元形状の測定である。
図30は、1DOFで曲がり、1DOFでねじれることができるリボン41上の剛体の循環アレイを示す。傾斜センサを格納している剛体は、リボンに沿った間隔で交差した矢印(剛体内に搭載された傾斜センサの軸42および43を描写している)によって表現される。MEMS加速度計を格納している集積回路のサイズから、剛体間で十分な曲げおよびねじれを可能にさせるいずれかの長さのサイズまでサイズを調整することができる剛体は、図示されない。間隙は、剛体間の可撓性を有する部分が重要な測定の角度範囲に亘って曲げおよびねじれの両方で一定の曲率を有することがさらに仮定される。概して、剛体が(軸方向に)より短いほど、必要とされるセンサの台数がより多い。
センサの軸42および43は、直交するものとして示されるが、これは、必須ではない。これらの軸は、同一線上にないことだけが必要である。直交軸42および43は、リボンの縦軸に対して45度の方向を向くように示されている。これは、最適角度範囲から離れて動作する最低台数のセンサの例を与える。MEMS加速度計は、線に沿って偏向していると考えられるばねサスペンション上に質量を格納する。偏向は、重力との線の角度の余弦に従う。センサ出力は、このようにして、角度が90度であるときに最も活発に変化し、角度が45度であるときに僅か30%だけ低減され、30度より下で極めて急激に減少する。それ故に、図示されるようにセンサが45度をなす状態でリボンが鉛直平面内にある場合、リボンの縦軸が鉛直または水平であるとき、妥当な応答が両方のセンサから得られる。リボンが水平平面内にあるとき、1対をなす両方のセンサは、最も活発な出力のための最適な方向に向けられる。これは、直交ペアのうち一方のセンサがリボンの軸と整列させられる場合と対照的である。鉛直平面内で鉛直であるとき、この平面から外れる傾斜は、唯一の応答するセンサが鉛直軸を有するセンサであり、このセンサがこのセンサの余弦応答曲線のうち最も応答しない部分にあることになるので、十分に感知されないであろう。45度の取り付けは、最良の妥協案であるが、多くの他の角度が広い角度に亘って機能するであろう。一部の状況において、最初の2つの軸に直交する第3の軸を有する別のセンサが使用され得る。このような状況において、通常は、3軸MEMS加速度計が使用されるであろう。
図31は、リボンの真横やや上方から見た、鉛直平面内で波状形の図30のリボン41を示す。剛体内のセンサの軸は、交差矢印42および43として示され、図30のため記載されたように、一体となって剛体自体を表現する。図31の構成は、波状形の、または、ジグザグ状のセンサのため既に説明した測定のうち多くを行うことが可能である。たとえば、この構成は、最も一般的な場合のうち1つである、波状形の経路がトンネル表面内で螺旋状中間軸を循環的に取り囲み、螺旋状中間軸が次に、トンネルの中心軸の後に続いて、別の中間軸を循環的に取り囲む場合に機能することがあり得る。
図32は、螺旋形をした図30のリボン41を示す。図32における物体は、図30における物体と同じである。この循環アレイは、螺旋の中心軸に沿って螺旋の拡張および圧縮を螺旋の横断(横方向)変形と共に感知することになる。拡張または圧縮は、リボンの曲げおよびねじれの変化を引き起こすことになる。横方向変形は、他の曲げおよびねじれを引き起こすことになる。曲げおよびねじれは、許された自由度を完全に定義するので、循環アレイの経路を完全に定義する。
循環アレイの測定の全ての場合の原理は、あらゆる可能な許された自由度が望ましい測定の範囲内で傾斜センサによって測定されるので、経路の形状が分かる、ということである。経路の形状は、経路を格納している表面を計算し、中間軸の形状を計算するために使用される。中間軸は、結果の解釈を簡略化するために、通常は、直線センサ経路と比較可能なデータを提供するために使用される。
図33は、ボアホール(図示せず)における鉛直ケーシング4の内部の従来技術のSAAの設置を示す。ケーシング4は、グラウト(図示せず)によってボアホールの内部にしっかりと保持される。SAAは、ジョイント2によって接続された、管の形をした剛体1で構成され、ジョイントは、2DOFで曲がることができるが、ねじれない。図33におけるより短い剛体45は、視覚的効果のためSAAの継続を指示し、動かないことが仮定され得る。ケーシングは、底部にキャップ44を有する。これは、上方から印加された軸方向力に対して反応し、材料(たとえば、水および泥)をケーシングの中に入れない。
軸方向力がSAAに印加され、ジョイントを膨らませ、ケーシングの内部でジョイントを密着保持する。第1のビュー51は、変形前のSAAおよびケーシングのXZ立面ビューを示す。第2のXZ立面ビュー52は、土壌が横方向に変形された後のシステムを示す。変形データの2つのグラフ52,53が示される。52は、XZビューであり、53は、YZビューである。各グラフにおける破線46は、最初の時点でのSAAの形状を示す。各グラフにおける実線47は、第2の時点での変形を示す。グラフ54は、変形のXYビューである。「+」記号49は、変形前のSAAの軸の位置を示す。円形48は、ケーシングの動かない底部分の内径を表現する。グラフ54内の実線47は、XZビュー52およびYZビュー53に示された実線の上から見下ろすビューである。グラフ52、53、および54における軸7は、それぞれ各ビューの座標であるXZ、YZ、およびXYを指示する。
図34は、図33の場合より大きい鉛直ケーシング4内の螺旋状経路におけるSAAの描写である。その他の点では、構成は、図33と同じである(即ち、ケーシングは、グラウトで固定されたボアホール内にあり、ケーシングに加えられた変形は、同じである)。SAAは、2DOFで曲がることができるが、ねじることができないジョイント2によって接続された、管の形をした剛体1で構成されている。ビュー50,51は、それぞれ変形されていないケーシングと変形されたケーシングの同じXZ立面ビューである。グラフ54、すなわち、XYビューは、SAAがケーシングの底部から頂部まで中心軸周りに循環するとき、SAAとケーシングとの接点の近くにあるSAAの中心線の「+」記号49を示す。XYビューにおける実線56は、この「上から見下ろす」ビューにおける中間軸を表現する。グラフ52,53は、図33における「直線状」SAAのデータと同一のデータを示すXZビューおよびYZビューである。しかし、この場合、データは、SAAの中心からではなく、中間軸データからのものである。ビュー50〜ビュー53において、データは、中間軸55,56によってそれぞれ変形されていない螺旋および変形された螺旋から示されている。螺旋の中間軸55,56は、中間軸上の第2の頂点57がSAAの第1の頂点2から投影された、予め与えられたアルゴリズムのうちいずれかによって見つけられることがあり得る(簡略化のため、ビュー52,53において一方の頂点57だけが示されるが、ポリライン55または56のあらゆる頂点は、同じ様に投影されているであろう。全ての他の符号付きの物体は、図33の場合と同じである。
2DOFで曲がるジョイントによって分離された剛体で構成された循環アレイは、ジョイントの剛性および長さの範囲に対して、たとえば、鉛直ケーシング内の重力によって、または、水平ケーシング内のばね力によって軸方向圧縮が加えられたとき、円筒状ケーシング(または、ケースなしのボアホール)内で自動的に螺旋形状をとることになる。このような循環アレイが鉛直ケーシング内で下げられたとき、下端部は、ケーシングの底部キャップまたはボアホールの底部に突き当たることになり、最も下にある剛体は、傾斜することになる。次の剛体は、傾斜することになるが、第1の剛体の頂部にある頂点をケーシングの周囲の周りに回らせる傾向があることになる。この回転は、剛体が「収まるべき場所に収まる」とき、あらゆる剛体に起こる。ケーシングの底部で2DOFジョイントによって分離された2つの剛体を考える。非常に小さい軸方向力の下で、2つの剛体は、ケーシングを二等分する収まるべき場所で静止することがあり得る。しかしながら、付加的な力は、簡単にこの形を壊し、形を螺旋に変えることができる。平面形状は、ジョイントとケーシングとの間に殆ど力が存在することなく、高摩擦がある場合に限り維持され得る。低摩擦および大きい力があると、平面形状は、中間頂点が周囲の周りを摺動する状態に保つために摩擦以外が存在しないならば、不安定である。
螺旋の形成は、時計回りでも反時計回りでもよい。螺旋が最初に形を作るときに、螺旋に僅かなねじりモーメントを加えることは、螺旋を2つの状態のうち一方に押し込むために十分である。いずれの状態も同じ中間軸と、形状および形状の変形の測定値とを提供することができる。螺旋が望ましい範囲にあるセグメント長さ、ジョイント長さ、およびジョイント剛性を有する循環アレイによって形成された特有の状態で、螺旋がケーシングの底部から頂部に向かって形を作り始めると、この螺旋は、もう一方の状態に反転することができない。
螺旋が形を作ると、螺旋は、螺旋方程式の結果である外向き膨張力によって収まるべき場所に固定される。ケーシング(またはボアホール)の直径は、力が摩擦およびジョイントの剛性に打ち勝つために十分でなければならないが、螺旋は、剛体よりケーシングの直径を20%大きくするだけで容易に形を作ることができる。この余分な余裕は、摩擦および剛性が低減された場合、縮小され得る。
螺旋形成の原理は、剛体が長いか、または、非常に短いかを問わずに同じである。非常に短い場合、循環アレイは、ケーシングまたはボアホールの壁とほぼ絶えず接触している。
以下の条件は、時計回りから反時計回りに、または、その逆に状態を反転させない螺旋の成形を助長する。
1.油圧ホースのような、ねじれ耐性があり、ジョイントの距離の範囲にS字曲線を形成することができないチュービングの全体的な格納容器の内部にあるセグメント。
2.S字曲線を形成しないために十分に短い、短めの可撓性ジョイントと一体となったセグメント。
3.ねじれ耐性があり、内部に格納されたアレイの機械的特性とは無関係に長さに沿って一定の曲げおよびねじれを維持するために十分に曲げ剛性がある全体的な格納容器内のセグメント。
1番目の事例の例は、内径が約19mmである油圧ホースに格納され、約20mmだけ軸方向に分離された28cmセグメントである。
2番目の事例の例は、外径が約15mmである油圧ホース製の、長さが約25mmである短いジョイントによって分離された30cmまたは50cmのセグメントである。
3番目の事例の例は、任意の構造物の短いまたは長いジョイントによって分離され、内径が21mmおよび外径が約27mmであるPVC管の格納容器の内部に保持された30または50cmセグメントである。
1番目の事例による構成は、多種多様のアレイ構造物を格納する、時計回りまたは反時計回りの向きの螺旋を形成する簡単であり、信頼できる方法である。PVCは、内部にあるアレイの剛性を圧倒する十分な剛性を有するが、十分に可撓性を有するので僅か20kgfの力を軸方向に加えると螺旋を形成することができる。
実際的なボアホール直径の内部での使用を可能にするために直径が十分に小さい格納管を追加することは、多種多様のアレイ構造物のため予測可能の螺旋または波状形のような特有の循環形状の成形を行うために利用され得る。格納管は、センサアレイを取り囲む。
センサアレイは、ジョイントおよびセグメントのサイズとジョイント曲げ剛性とに依存して、ジグザグ状、螺旋状、または方位が無作為であることがあるが、格納管の内壁と直接的に接触した頂点を有するものである循環形状をアレイに与えるために、従来技術の膨張ジョイントを用いて、および/または、重力を含む軸方向力の付加によって、格納管の内部に固定保持されることがある。これは、センサアレイがこれの格納管の内部に中間軸を有し、格納ボアホールの内部で螺旋もしくはその他の循環形状の形をした中間軸がボアホールの全体的な中間軸を規定する、という「入れ子型」循環性の例である。
傾斜センサ付きの剛体の螺旋状配置は、ジョイントの弾性限界を越えてトルクが加えられた、壊れたジョイントから生じるねじれ誤差を訂正することを許容する。このようなジョイントはどれでも鉛直軸を有する螺旋内の剛体の不正確なロール角度をもたらすものであり、ここで、ロール角度は、剛体の底部と相対的な頂部の2DOFの傾斜を報告する責任がある剛体内のセンサによって読み取られた静的なX加速度とY加速度の比の逆正接である同じ2つのXセンサおよびYセンサは、螺旋が主に水平である場合、ロール角度の尺度をさらに提供するものである。鉛直および水平の両方の場合、螺旋は、略直線状である均一直径の管の中に取り付けられているので、規則的なロール角度の進みを有する必要がある。このような螺旋は、予測可能な、一定のロール角度とその他の傾斜との組を有するものである。欠陥のあるジョイントを(螺旋の計算の順番で)越え、欠陥のあるジョイントを含んでいるセンサからのデータは、ねじれ誤差の負数に等しいオフセットを適用することにより訂正され得る。類似する手法は、センサアレイが既知形状の中のいずれかの表面に搭載された場合に使用され得る。全ての場合に、訂正されるべき剛体の何らかの傾斜が存在する筈であり、または、X加速度およびY加速度は、ねじれと無関係に等しいであろう。
螺旋を形成しないセンサアレイは、それでもなお中間軸を循環的に取り囲むことがある。このような場合としては、
1.螺旋は、ジョイントおよびセグメントの剛性および長さに起因して、規則的または不規則的な間隔で反時計回りから時計回りにまたは逆に向きを反転する。
2.アレイは、隣接する頂点がボアホールの反対側にある状態でボアホールの内部の鉛直平面内でジグザグ形状をとる。
3.頂点は、ランダム、または、非常に変わりやすい方位角でボアホールの壁の上に載る。
4.1つ以上のセグメントがボアホールの壁に存在する。
が含まれる。
上記の全ての例において、ボアホールの形状を表現する中間軸が見つかることがある。頂点は、ボアホールの外側のスペースを占有しないことがある、という知識に基づいて、少なくとも多数のねじれ誤差の訂正を実行することも可能である。頂点の位置が(たとえば、セグメントの頂点がボアホールの反対側にあるように移動するボアホール壁にぴったり接したセグメントによって)経時的にシフトするとしても、中間軸は、それでもなおボアホールの形状を表現するであろう。
図35〜図37は、線セグメント1が曲げ剛性のあるジョイント(円形2)によって分離された長い剛体を指示する、循環アレイの経路のXZビュー、YZビュー、およびXYビューを示す。点線49は、図37のXYビューにおいて循環アレイに境界を付けるボアホールまたはケーシングの内径を示し、点線は、ケーシングの動かない底部にあるとみなされる。各立面図(図35および図36)は、「不規則」に見えるが、ジョイントは、図37において平面図で分かるように、ケーシングの周りの規則的な方位角間隔にある横方向膨張力によってケーシング(またはボアホール)に固定されていることが分かる。アルゴリズムは、この場合ケーシングの中心線である最終的な中間軸に収束する第1、第2、またはこれ以上の軸を見つけるために各ビューに適用され得る。代替的に、各ビューにおける空間波形のフーリエ成分は、見つけられることがあり、中間軸は、(反復が必要とされることなく)これらの全てに対して見つけられ、最終的な中間軸に組み合わされ得る。両方のタイプのアルゴリズムは、本説明の中で既に詳細に説明されている。
螺旋状アレイの別の例として、図38のビュー50およびビュー51は、それぞれ、図34の前述の螺旋状の例より多くの剛体を含んでいる循環状アレイの同じXZ立面図の変形されていない状態および変形された状態を示す。剛体1は、小さい矩形として描写されている。物理的に、剛体は、センサが嵌め合わされ、ジョイントを形成するために油圧ホース内に密着保持された短い管でもあり得る。剛体の各ペアの間にあるジョイント2は、本例において、剛体から剛体まで延びる油圧ホースから形成される。循環アレイは、(ケースなしのボアホールであることもあり得る)ケーシング4の内部にほぼ滑らかな螺旋曲線を形成する。本例において、ケーシングは、端部キャップ44が嵌め合わされる。端面キャップは、上方から印加された軸方向力に反応し、水および土壌をケーシングの中に入れない。
循環アレイの中間軸からのデータは、変形されていない状態および変形された状態にそれぞれ対応する破線55,56としてビュー50〜53に示される。中間軸は、図34の前述の例の中間軸に類似するが、より多数のデータ点が滑らかな曲線を作り出す。循環アレイジョイントの剛性がセンサ付きの剛体の間に略螺旋状の形状を維持するために十分である場合、センサを有する剛体の個数を可能であることがある。簡略化のため、剛体は、ビュー50およびビュー51の上方部分に示されていないが、データは、剛体が存在するかのように示される。
本明細書に記載された非直線状アレイのいずれに対しても、一部(「1組」)の剛体だけにセンサを装着し、その他の剛体にはセンサを装着しないことが可能であることがある。装着されていない(「センサ化されていない」)剛体は、アレイを格納する媒体の形状の局所的な細部に起因して、傾斜することになり、この細部が見逃される危険性がいつでもある。しかし、1組の剛体だけがセンサを装着され、アレイを保持するケーシングの幾何学的形状、または、特に曲げ剛性がこのような局所的な外乱を取り除き、全体的な形状を忠実に捕捉するのに十分である有用な場合がある。堅いケーシングは、低空間周波数成分だけを剛体に通過させる形状の空間周波数成分のフィルタであると見なすことができる。アレイおよび/またはアレイの可撓性ジョイントの螺旋形状は、一定の曲げおよびねじれを有する曲線に起因して剛性が増加するので、この空間フィルタリングに寄与する可能性がある。
図38において、グラフ52,53は、データのXZビューおよびYZビューである。グラフ55は、XYビューである。「+」記号57は、螺旋状アレイがケーシングの底部から頂部まで上昇するときの剛体中心の場所を示す。実線58は、中間軸56の上から見下ろした図であり、図34の場合より滑らかである。同様の図と同じように、軸7は、ビュー52〜ビュー54において座標を表示する。
図39は、油圧ホース製の長いジョイント2によって分離され、広く間隔を取られた剛体1を含んでいる循環状アレイを示す。剛体は、剛性パイプまたは管でもあり得る。間隔および剛性は、ジョイント材料および剛体がケーシングとほぼ絶えず接触しているほぼ滑らかな螺旋を形成するようなものである。ビュー50,51は、循環アレイの同じXZビューの立面ビューである。ビュー52〜ビュー54は、XZビュー、YZビュー、およびXYビューである。ビュー54における+記号58は、螺旋がケーシングの底部から頂部まで上昇するときの剛体の中心の場所である。軸7は、各ビュー52〜54の座標を表す。ビュー54内の円形48は、端部キャップ44が位置している動かない底部にあるケーシングの内周を表す。
実例として、図39において、全てのビューにおける中間軸55,56は、他の例と同様に、広く間隔を取られた剛体からの傾斜を使用することにより計算されているが、この場合、連続的な滑らかな空間曲線に沿った傾斜のサンプルとして使用する。これは、結果として、ポリライン中間軸ではなく、連続的な中間軸を生じる。中間軸を決定するこの手段を実施するために、傾斜のサンプルは、3次元スプラインフィット空間曲線に沿った制御点として使用されるであろう。スプラインフィット曲線は、次に、望ましい空間分解能で中間軸を計算するために使用されるであろう。この結果は、図38の中間軸に非常に類似する。当然ながら、長いジョイントを用いると、剛体間の局所化された変形が見逃されるか、または、部分的に見逃される機会が増える。
図40は、上記図39の構造物に類似し、剛体1の間により一層長い間隔がある構造物を示す。剛体間のジョイント2は、ねじれに抵抗し、2DOFで曲がるために油圧ホースで作られている。このホースおよび剛体は、螺旋を形成する。可撓性ジョイントは、長いとしても、螺旋方程式によって決定されるように、一定の曲率とねじれを維持する。ジョイントは、十分に長く、これは、図39における循環アレイの長さより一層大きい程度まで、循環アレイの長さに沿って傾斜を「サンプリング」する場合である。しかし、形状の変化が急激ではない限り、これは、形状および形状の変形を監視する有用な方法である。循環アレイは、底部キャップ44付きのケーシング4の中にある。
図41は、上記図40の構造物に類似し、剛体間に同様に長い間隔を有する構造物を示す。剛体は、剛体の端部でケーシングの内面に押し付けられているが、周囲の周りの全てで密に嵌合していない図40の剛体とは違って、ケーシングの中に密に嵌合するように設計されている。長いジョイントは、この長さの殆どに亘って螺旋状であり、ケーシングとのほぼ一定の接触と、ほぼ一定の曲げおよびねじれを維持する。螺旋の曲げモーメントは、剛体に伝達され、剛体とケーシングとの間にギャップがある場合、この曲げモーメントは、剛体とケーシングとの間に一定の角度オフセットを設定するために剛体をロックすることになり、それ故に、剛体を収まるべき場所に効果的にロックする。
図42および図43は、各ビューにおいて第1の波長を有する第1の螺旋21の形をした循環アレイのXZビューおよびYZビューを示し、螺旋は、第1の直径を有するケーシング(または、ケースなしのボアホール)59の中にある。螺旋は、中間軸22を有する。図44は、より直径の大きいケーシングまたはボアホール60内の第2の螺旋62における同じ循環アレイのXZビューを示す。より直径の大きいケーシングは、結果として、XZビューまたはYZビューにおいて第2の、より短い波形を生じた(簡略化のため、一方のビューXZだけが第2の螺旋に対して表示される)。第2の螺旋は、鉛直次元内の波状形の経路上により短い間隔の「第1の頂点」と、中間軸63の鉛直方向の広がりに沿ってより短い間隔の「第2の頂点」とを有する。
頂点例は、各ビューの螺旋および中間軸上に示される。図42すなわちXZビューにおいて、第1の頂点64,65は、螺旋上に90度の間隔を置いて+記号として示される。中間軸22上の丸記号66,67は、それぞれ、螺旋上の第1の頂点64,65に対応する第2の頂点である。丸記号66は、ビュー内で+記号65と同じ場所にある。図43において、+記号68,69と、丸記号70,71とは、図42における記号に随伴するが、YZビューにおいて随伴しない。これらの記号は、第1の頂点間隔71を有する。
図44、すなわち、より大きなケーシング内の同じ循環アレイのXZビューにおいて、+記号72,73は、第1の頂点であり、丸記号74,75は、第2の頂点である。記号73,75は、同じ場所にある。記号の間隔は、より直径の大きい螺旋形状上で90度である。鉛直方向間隔75は、鉛直方向間隔71より小さい。
図45すなわちXYビューは、第1のケーシングの内側周囲76と、第2のケーシングのより大きい周囲77とを示す。各ビューにおける軸7は、各ビューの座標を示す。
図42〜図45は、設置中に様々なケーシングサイズを選択することによって、同じ循環アレイ内でケーシングに沿って異なった間隔でセンサを分布させることが可能であることを例示する。ケーシングの定寸は、ケーシング内の循環アレイの嵌め合わせを調整する、または、ケーシングなしのボアホール内の土壌のポアソン比と適合させるために螺旋ひずみ比を調整する手段である螺旋のピッチも制御する。
循環センサアレイがケーシングまたはボアホール内で螺旋形をしているとき、外力からの破砕またはその他の破損を和らげる空きスペースが存在する。外力は、アレイを局所的に動かす場合、測定を多少ゆがめることがあるが、概して、循環センサアレイは、破砕が進行するときにより長く存続するものであり、空きスペースが殆どもしくは全く利用できない密に嵌合されたアレイよりも長く抽出可能な状態を保つものである。傾斜計設備の中にも空きスペースが存在するが、傾斜計のホイールを保持する溝は、外力によってゆがめられる最初の要素であり、この外力は、通常は、傾斜計設備を直ぐに使えないようにする。
図46は、格納管の曲げ剛性をセンサジョイント(図示されないが、各セグメントを次のセグメントに接合することが分かっている)より増大させることによって、予測できる循環形状を強化するために追加された、格納管80内のセンサアレイのセグメント1を示す。軸方向力が、格納管をケーシング4の内部にある、もしくは、ケーシング4に接触した、または、ケースなしのボアホールの内部にある螺旋のような望ましい循環形状に置くために、格納管に加えられることがあり、重力の軸方向力を含むことがあり、重力を含むことがある別の軸方向力が、格納管の内面と接触した頂点(ジョイントの中心)によって格納管の中でセグメントを動かなくさせるため、格納管の内部に別の循環形状を生み出すために、セグメントに加えられることがある。他の例と同じように、端部キャップ44は、土壌および水をケーシングの中に入れないために、および、軸方向力に対する反応を行うために使用され得る。格納管は、独立してキャップをかぶせられることがある(図示せず)。図46におけるセグメントは、代案として、かなりの長さのジョイントによって分離されることがあり得るものであり、前述の例におけるケーシング内部のセグメントおよびジョイントとこれらの形に関する全ての説明は、格納管内部のセグメントおよびジョイントに適用できる。図46は、「入れ子型」循環経路の組の例であり、一方の組は、格納管の内部のセグメントに関連し、もう一方の組は、ケーシングまたはケースなしのボアホールの内部のセグメントに関連する。セグメントの頂点から導出された第1の中間軸(図示せず)は、格納管の経路を表現する形状を有するものである。第1の中間軸の経路から導出された第2の中間軸(図示せず)は、ボアホールまたはボアホールのケーシングの経路を表現する形状を有するものである。
上記は、本発明がどのように適用されるか、および、使用されるかを示す具体的な実施形態の説明を構成する。これらの実施形態は、単なる実例である。本発明は、これの最も広い、より具体的な態様で、以下の請求項においてさらに記載および定義される。
特許請求の範囲と、特許請求の範囲で用いられた文言とは、記載された発明の変形例の観点で理解されるべきである。これらは、このような変形例に限定されるべきではなく、本明細書に提供された発明および開示の範囲内で暗黙のものである本発明の全ての範囲に及ぶものとして解釈されるべきである。