JP6566902B2 - 半導体装置及び表示装置 - Google Patents
半導体装置及び表示装置 Download PDFInfo
- Publication number
- JP6566902B2 JP6566902B2 JP2016064290A JP2016064290A JP6566902B2 JP 6566902 B2 JP6566902 B2 JP 6566902B2 JP 2016064290 A JP2016064290 A JP 2016064290A JP 2016064290 A JP2016064290 A JP 2016064290A JP 6566902 B2 JP6566902 B2 JP 6566902B2
- Authority
- JP
- Japan
- Prior art keywords
- semiconductor device
- abnormality
- driver
- unit
- master
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/079—Root cause analysis, i.e. error or fault diagnosis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/0706—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment
- G06F11/0736—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment in functional embedded systems, i.e. in a data processing system designed as a combination of hardware and software dedicated to performing a certain function
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/0751—Error or fault detection not based on redundancy
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/0751—Error or fault detection not based on redundancy
- G06F11/0754—Error or fault detection not based on redundancy by exceeding limits
- G06F11/0757—Error or fault detection not based on redundancy by exceeding limits by exceeding a time limit, i.e. time-out, e.g. watchdogs
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/14—Error detection or correction of the data by redundancy in operation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/14—Error detection or correction of the data by redundancy in operation
- G06F11/1402—Saving, restoring, recovering or retrying
- G06F11/1446—Point-in-time backing up or restoration of persistent data
- G06F11/1448—Management of the data involved in backup or backup restore
- G06F11/1451—Management of the data involved in backup or backup restore by selection of backup contents
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/14—Error detection or correction of the data by redundancy in operation
- G06F11/1402—Saving, restoring, recovering or retrying
- G06F11/1446—Point-in-time backing up or restoration of persistent data
- G06F11/1458—Management of the backup or restore process
- G06F11/1469—Backup restoration techniques
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G3/00—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes
- G09G3/20—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes for presentation of an assembly of a number of characters, e.g. a page, by composing the assembly by combination of individual elements arranged in a matrix no fixed position being assigned to or needed to be assigned to the individual characters or partial characters
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2310/00—Command of the display device
- G09G2310/02—Addressing, scanning or driving the display screen or processing steps related thereto
- G09G2310/0264—Details of driving circuits
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2330/00—Aspects of power supply; Aspects of display protection and defect management
- G09G2330/12—Test circuits or failure detection circuits included in a display system, as permanent part thereof
Description
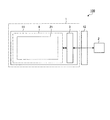
図1は、実施形態1に係る半導体装置を適用した表示システムの概略構成の一例を示す図である。図1に示す表示システム100は、表示装置1と、上位制御装置(Host)2とを含み構成される。
図18は、実施形態2に係る半導体装置を構成するドライバICの異常判定部の内部ロジック構成の一例を示す図である。なお、実施形態2に係る半導体装置を適用した表示システムの概略構成、表示装置のブロック構成、ドライバICの内部構成、及び状態監視部については、上述した実施形態1と同様であるので、ここでの重複する説明は省略する。
図21は、第1フィルタ部の図19とは異なる一構成例及び動作例を示す図である。図21(a)は、第1フィルタ部621aの一構成例を示し、図21(b)は、第1フィルタ部621aが設けられたドライバIC6がマスターデバイス(ドライバIC(MASTER)6)である場合の動作例を示し、図21(c)は、第1フィルタ部621aが設けられたドライバIC6がスレーブデバイス(ドライバIC(SLAVE)6)である場合の動作例を示している。
図23は、実施形態3に係る半導体装置を構成するドライバICの内部構成の一例を示す図である。なお、実施形態3に係る半導体装置を適用した表示システムの概略構成、表示装置のブロック構成、状態監視部、及び異常判定部の内部ロジック構成については、上述した実施形態1あるいは実施形態2と同様であるので、ここでの重複する説明は省略する。
図26は、第2フィルタ部の図24とは異なる一構成例を示す図である。図26に示す例において、第2フィルタ部67aは、フィルタ回路671aを含み構成されている。
2 上位制御装置
3 ドライバ回路部
4 表示部
5 半導体装置
6,6a,6b ドライバIC
8 シリアルバス
11 ガラス基板
12 中継基板
21 表示領域
61 状態監視部
62,62a 異常判定部
63 異常時処理部
64 レジスタ部
65 データ格納部
66 レジスタ回復部
67,67a 第2フィルタ部
100 表示システム
621,621a 第1フィルタ部
622,622a フィルタ回路
623,624 スイッチ回路
671,671a フィルタ回路
6221 LPF(ローパスフィルタ)
6222 比較器
6223 タイマカウンタ
6711 LPF(ローパスフィルタ)
6712 比較器
6713 タイマカウンタ
Claims (11)
- 複数の半導体デバイスで構成され、
前記半導体デバイスは、
当該半導体デバイスによって実現する複数種の機能を監視し、該機能が正常であるか否かを示す複数種の状態監視信号を出力する状態監視部と、
複数種の前記状態監視信号に基づき、前記各機能の異常判定を行う異常判定部と、
を備え、
複数の前記半導体デバイスのうち、何れか1つの半導体デバイスに備えられた前記異常判定部は、自身の異常判定結果と、他の半導体デバイスに備えられた前記異常判定部における異常判定結果とに基づき、複数の前記半導体デバイスにおける1以上の前記機能が異常であることを検知した場合に、当該複数の前記半導体デバイスにおける1以上の前記機能が異常であることを検知した前記異常判定部から複数の前記半導体デバイスに対して異常検知信号が出力され、
前記半導体デバイスは、
前記異常検知信号に基づき所定の異常時処理を行う異常時処理部を備える、
半導体装置。 - 前記異常時処理部は、複数の前記半導体デバイスにおいて同種の前記異常時処理を行う、
請求項1に記載の半導体装置。 - 複数の前記半導体デバイスは、
前記異常検知信号を出力する半導体デバイスと前記異常検知信号が入力される他の半導体デバイスとを切り替える切替手段を有する、
請求項2に記載の半導体装置。 - 前記半導体デバイスは、
前記機能の異常が所定時間続いた場合に、前記異常検知信号を通過させる第1フィルタ部を備える、
請求項1乃至請求項3の何れか一項に記載の半導体装置。 - 前記第1フィルタ部は、ローパスフィルタを含む、
請求項4に記載の半導体装置。 - 前記第1フィルタ部は、タイマカウンタを含む、
請求項4に記載の半導体装置。 - 前記半導体デバイスは、
前記各機能におけるパラメータ値が格納されるレジスタ部を備え、
前記異常判定部は、
前記異常時処理として、前記レジスタ部におけるパラメータ値を初期化する、
請求項1乃至請求項6の何れか一項に記載の半導体装置。 - 前記半導体デバイスは、
前記レジスタ部における前記パラメータ値の設定データを格納するデータ格納部と、
前記異常検知信号に基づき、前記レジスタ部における前記パラメータ値を、前記データ格納部に格納された前記設定データに書き換えるレジスタ回復部と、
前記機能の異常が所定時間続いた場合に、前記異常時処理部に入力される前記異常検知信号を通過させる第2フィルタ部と、
を備える、
請求項7に記載の半導体装置。 - 前記異常検知信号を出力する前記半導体デバイスに備えられた前記レジスタ回復部は、
前記異常検知信号に基づき、複数の前記半導体デバイスに備えられた前記レジスタ部における前記パラメータ値を、前記異常検知信号を出力する半導体デバイスに備えられた前記データ格納部に格納された前記設定データに書き換える、
請求項8に記載の半導体装置。 - 前記第2フィルタ部は、ローパスフィルタを含む、
請求項8又は請求項9に記載の半導体装置。 - 前記第2フィルタ部は、タイマカウンタを含む、
請求項8又は請求項9に記載の半導体装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016064290A JP6566902B2 (ja) | 2016-03-28 | 2016-03-28 | 半導体装置及び表示装置 |
| US15/464,602 US10599507B2 (en) | 2016-03-28 | 2017-03-21 | Semiconductor apparatus and display apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016064290A JP6566902B2 (ja) | 2016-03-28 | 2016-03-28 | 半導体装置及び表示装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017183352A JP2017183352A (ja) | 2017-10-05 |
| JP6566902B2 true JP6566902B2 (ja) | 2019-08-28 |
Family
ID=59898644
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016064290A Expired - Fee Related JP6566902B2 (ja) | 2016-03-28 | 2016-03-28 | 半導体装置及び表示装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10599507B2 (ja) |
| JP (1) | JP6566902B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI569253B (zh) * | 2016-01-12 | 2017-02-01 | 友達光電股份有限公司 | 驅動器及其操作方法 |
| US20200013321A1 (en) * | 2018-07-09 | 2020-01-09 | Sharp Kabushiki Kaisha | Display device and method for detecting state thereof |
| JP2020024316A (ja) * | 2018-08-08 | 2020-02-13 | 株式会社Joled | 表示装置及び表示装置の検査方法 |
| CN112889246B (zh) * | 2019-02-08 | 2023-09-22 | 松下电器(美国)知识产权公司 | 异常判定方法、异常判定装置以及程序 |
| JP7268436B2 (ja) | 2019-03-25 | 2023-05-08 | セイコーエプソン株式会社 | 駆動回路、電気光学装置、電気光学装置を備える電子機器、及び電子機器を備える移動体 |
| JP7371455B2 (ja) * | 2019-11-21 | 2023-10-31 | セイコーエプソン株式会社 | 駆動回路、表示モジュール、及び移動体 |
| CN113920936B (zh) * | 2021-10-18 | 2024-03-12 | 京东方科技集团股份有限公司 | 一种信号监测电路、显示控制电路及显示装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3325652B2 (ja) | 1993-06-18 | 2002-09-17 | ローム株式会社 | 液晶表示装置のスクロール表示法 |
| JP4183884B2 (ja) * | 2000-04-25 | 2008-11-19 | アルゼ株式会社 | 遊技場監視システム |
| JP3646621B2 (ja) * | 2000-04-28 | 2005-05-11 | 株式会社デンソー | 複数電源回路を備えた電子制御装置 |
| US7813096B2 (en) * | 2005-12-26 | 2010-10-12 | Autonetworks Technologies, Ltd. | Power supply controller |
| US7945345B2 (en) * | 2008-08-06 | 2011-05-17 | Asm Japan K.K. | Semiconductor manufacturing apparatus |
| JP5331493B2 (ja) * | 2009-01-13 | 2013-10-30 | 日立ビークルエナジー株式会社 | 電池制御装置 |
| JP5435020B2 (ja) * | 2011-12-22 | 2014-03-05 | 株式会社デンソー | 位置検出装置 |
| DE102012206808B4 (de) * | 2012-04-25 | 2021-03-11 | Zf Friedrichshafen Ag | Mehrstufengetriebe |
| CN105191090B (zh) * | 2013-03-20 | 2017-09-19 | 三菱电机株式会社 | 信号传递电路以及具备该电路的电力变换装置 |
| JP6312195B2 (ja) | 2013-10-29 | 2018-04-18 | シナプティクス・ジャパン合同会社 | 集積回路装置、集積回路、表示装置、及び、ドライバic |
| JP6151227B2 (ja) * | 2014-08-25 | 2017-06-21 | 株式会社東芝 | 異常検知システム及び半導体デバイスの製造方法 |
| JP6630151B2 (ja) * | 2015-12-28 | 2020-01-15 | ラピスセミコンダクタ株式会社 | 半導体装置、電池監視システム、及び半導体装置の診断方法 |
-
2016
- 2016-03-28 JP JP2016064290A patent/JP6566902B2/ja not_active Expired - Fee Related
-
2017
- 2017-03-21 US US15/464,602 patent/US10599507B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20170277586A1 (en) | 2017-09-28 |
| US10599507B2 (en) | 2020-03-24 |
| JP2017183352A (ja) | 2017-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6566902B2 (ja) | 半導体装置及び表示装置 | |
| JP6637340B2 (ja) | 液晶表示システム | |
| US20100033453A1 (en) | Liquid crystal display having endurance against electrostatic discharge | |
| JP2016206578A (ja) | ドライバic及び電子機器 | |
| JP6742899B2 (ja) | 半導体装置 | |
| US20190237036A1 (en) | Display device | |
| US20150317018A1 (en) | Shift register adaptable to a gate driver | |
| JP6205505B2 (ja) | 半導体装置及びその制御方法 | |
| TW201701163A (zh) | 事件產生單元 | |
| US9712173B2 (en) | Clock signal stop detection circuit | |
| JP2017146660A5 (ja) | ||
| US8762792B2 (en) | Event monitor having switch matrix, separate counter, and compare circuitry | |
| CN109427276B (zh) | 显示装置、时序控制电路及其信号重建方法 | |
| US8826433B2 (en) | Security intrusion detection and response | |
| JP2018163498A (ja) | 監視回路 | |
| JP5517301B2 (ja) | データ処理システム | |
| TW201604679A (zh) | 計算機系統 | |
| WO2016204070A1 (ja) | Cpu監視装置 | |
| US11508273B2 (en) | Built-in test of a display driver | |
| JP5743092B2 (ja) | 情報処理システム | |
| JP2019121033A (ja) | 航空機用制御装置、および相互診断方法 | |
| JP6420139B2 (ja) | 半導体デバイス | |
| JP2007257462A (ja) | バスリセット・システム及び方法 | |
| JP2015148787A (ja) | 半導体装置 | |
| JP2017054128A (ja) | 表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180919 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190612 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190618 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190730 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6566902 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |