JP6553741B2 - 呼吸推定方法および装置 - Google Patents
呼吸推定方法および装置 Download PDFInfo
- Publication number
- JP6553741B2 JP6553741B2 JP2017552730A JP2017552730A JP6553741B2 JP 6553741 B2 JP6553741 B2 JP 6553741B2 JP 2017552730 A JP2017552730 A JP 2017552730A JP 2017552730 A JP2017552730 A JP 2017552730A JP 6553741 B2 JP6553741 B2 JP 6553741B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- subject
- respiratory
- estimated
- respiration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000029058 respiratory gaseous exchange Effects 0.000 title claims description 174
- 238000000034 method Methods 0.000 title claims description 66
- 238000012545 processing Methods 0.000 claims description 102
- 239000011159 matrix material Substances 0.000 claims description 90
- 238000006073 displacement reaction Methods 0.000 claims description 85
- 230000001133 acceleration Effects 0.000 claims description 84
- 238000001514 detection method Methods 0.000 claims description 62
- 230000036387 respiratory rate Effects 0.000 claims description 55
- 238000005259 measurement Methods 0.000 claims description 46
- 238000012935 Averaging Methods 0.000 claims description 35
- 230000000241 respiratory effect Effects 0.000 claims description 34
- 230000033001 locomotion Effects 0.000 claims description 33
- 238000005070 sampling Methods 0.000 claims description 32
- 230000000747 cardiac effect Effects 0.000 claims description 28
- 230000036391 respiratory frequency Effects 0.000 claims description 27
- 230000010354 integration Effects 0.000 claims description 26
- 238000000605 extraction Methods 0.000 claims description 22
- 230000004217 heart function Effects 0.000 claims description 18
- 238000004364 calculation method Methods 0.000 claims description 17
- 238000001914 filtration Methods 0.000 claims description 15
- 230000003044 adaptive effect Effects 0.000 claims description 14
- 238000001228 spectrum Methods 0.000 claims description 11
- 238000010586 diagram Methods 0.000 description 21
- 108010076504 Protein Sorting Signals Proteins 0.000 description 17
- 238000006243 chemical reaction Methods 0.000 description 7
- 239000000284 extract Substances 0.000 description 5
- 238000012544 monitoring process Methods 0.000 description 4
- 210000003403 autonomic nervous system Anatomy 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000006996 mental state Effects 0.000 description 3
- 230000032683 aging Effects 0.000 description 2
- 210000000467 autonomic pathway Anatomy 0.000 description 2
- 230000035565 breathing frequency Effects 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 208000023504 respiratory system disease Diseases 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 230000004872 arterial blood pressure Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 210000003754 fetus Anatomy 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 210000002837 heart atrium Anatomy 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 210000003928 nasal cavity Anatomy 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000009531 respiratory rate measurement Methods 0.000 description 1
- 230000035882 stress Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000002087 whitening effect Effects 0.000 description 1
Images























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Detecting, measuring or recording devices for evaluating the respiratory organs
- A61B5/0816—Measuring devices for examining respiratory frequency
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/0205—Simultaneously evaluating both cardiovascular conditions and different types of body conditions, e.g. heart and respiratory condition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Detecting, measuring or recording devices for evaluating the respiratory organs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Detecting, measuring or recording devices for evaluating the respiratory organs
- A61B5/087—Measuring breath flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/113—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb occurring during breathing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
- A61B5/318—Heart-related electrical modalities, e.g. electrocardiography [ECG]
- A61B5/346—Analysis of electrocardiograms
- A61B5/349—Detecting specific parameters of the electrocardiograph cycle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7203—Signal processing specially adapted for physiological signals or for diagnostic purposes for noise prevention, reduction or removal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7221—Determining signal validity, reliability or quality
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/725—Details of waveform analysis using specific filters therefor, e.g. Kalman or adaptive filters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/7253—Details of waveform analysis characterised by using transforms
- A61B5/7257—Details of waveform analysis characterised by using transforms using Fourier transforms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Detecting, measuring or recording devices for evaluating the respiratory organs
- A61B5/0803—Recording apparatus specially adapted therefor
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Veterinary Medicine (AREA)
- Physiology (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Pulmonology (AREA)
- Signal Processing (AREA)
- Cardiology (AREA)
- Psychiatry (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Mathematical Physics (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Description
BRcombined=(QRSABRRSA+QQRSaBRQRSa+QaccelBRQRSa)
/(QRSA+QQRSa+Qaccel) ・・・(1)
Q=exp{−(E/τ)} ・・・(2)
ここでτは経験的に定められた定数である。なお、信号振幅がノイズレベルの場合、Qはゼロに設定される。
また、本発明の呼吸推定方法は、被験者の心機能に関する第1のデータの時系列信号と前記被験者の呼吸運動による加速度に関する第2のデータの時系列信号の各々から前記被験者の呼吸数をそれぞれ推定する第1のステップと、前記第1のデータから推定した呼吸数と前記第2のデータから推定した呼吸数の各々についてカルマンフィルタによりノイズを濾した呼吸数をそれぞれ推定する第2のステップと、この第2のステップで得られた複数の呼吸数の推定値の重み付け平均化処理を実行する第3のステップとを含み、前記第3のステップは、前記第1のデータと前記第2のデータの各々に関する前記カルマンフィルタの自乗推定誤差から前記重み付け平均化処理のための重み付け定数を算出するステップと、このステップで算出した重み付け定数を用いて、前記第1のデータに基づく呼吸数の推定値と前記第2のデータに基づく呼吸数の推定値とを重み付け平均化するステップとを含むことを特徴とするものである。
また、本発明の呼吸推定装置は、被験者の心機能に関する第1のデータの時系列信号と前記被験者の呼吸運動による加速度に関する第2のデータの時系列信号の各々から前記被験者の呼吸数をそれぞれ推定する呼吸数推定部と、前記第1のデータから推定した呼吸数と前記第2のデータから推定した呼吸数の各々についてノイズを濾した呼吸数をそれぞれ推定するカルマンフィルタと、このカルマンフィルタで得られた複数の呼吸数の推定値の重み付け平均化処理を実行する統合処理部とを備え、前記統合処理部は、前記第1のデータと前記第2のデータの各々に関する前記カルマンフィルタの自乗推定誤差から前記重み付け平均化処理のための重み付け定数を算出する重み付け定数生成処理部と、この重み付け定数生成処理部によって算出された重み付け定数を用いて、前記第1のデータに基づく呼吸数の推定値と前記第2のデータに基づく呼吸数の推定値とを重み付け平均化する重み付け平均化処理部とから構成されることを特徴とするものである。
以下、本発明の実施例について図面を参照して説明する。図1は本発明の第1実施例に係る呼吸推定装置の構成を示すブロック図である。呼吸推定装置は、被験者の心電位波形を測定する心電計1と、被験者の呼吸運動による3軸加速度を検出する3軸加速度計2と、心電計1と3軸加速度計2で得られたデータを記憶する記憶部3,4と、心電位波形からR波振幅を検出するR波振幅検出部5と、心電位波形からRR間隔を検出するRR間隔検出部6と、3軸加速度信号から加速度ベクトルの角度変位を検出する加速度変位検出部7とを備えている。また、呼吸推定装置は、R波振幅の時系列信号、RR間隔の時系列信号、角度変位の時系列信号の各々をサンプリングする標本化部8と、R波振幅の時系列信号、RR間隔の時系列信号、角度変位の時系列信号の各々を帯域制限するバンドパスフィルタ9とを備えている。また、呼吸推定装置は、バンドパスフィルタ9で得られたR波振幅の時系列信号、RR間隔の時系列信号、角度変位の時系列信号の各々をフーリエ変換して、R波振幅、RR間隔、角度変位の各々の信号の周波数スペクトルを求め、これら周波数スペクトルの各々から被験者の呼吸数を推定する呼吸数推定部10を備えている。また、呼吸推定装置は、R波振幅の時系列信号から推定した呼吸数とRR間隔の時系列信号から推定した呼吸数と角度変位の時系列信号から推定した呼吸数の各々についてノイズを濾した呼吸数を推定するカルマンフィルタ11と、カルマンフィルタ11で得られた呼吸数の推定値を重み付け平均化することにより、データを統合する統合処理部12とを備えている。さらに、呼吸推定装置は、R波振幅、RR間隔、角度変位の各々の信頼度を示すエラー係数を測定するエラー測定部13と、エラー係数に基づいて重み付け行列の成分である重み付け定数を求める重み付け定数生成部14と、カルマンフィルタ11の推定誤差が最小となるようにカルマンフィルタ11の共分散推定誤差行列を更新する適応推定部15と、重み付け行列と共分散推定誤差行列に基づいてカルマン利得を更新する重み付け演算部16とを備えている。

次に、式(7)に用いるパラメータGkを求めるためには、単純に重み付け行列Wkを用いて、式(13)の計算を行う。
次に、本発明の第2実施例について説明する。図9は本発明の第2実施例に係る呼吸推定装置の構成を示すブロック図である。呼吸推定装置は、心電計21と、3軸加速度計22と、記憶部23,24と、R波振幅検出部25と、RR間隔検出部26と、加速度変位検出部27とを備えている。また、呼吸推定装置は、標本化部28と、バンドパスフィルタ29と、バンドパスフィルタ29で得られたR波振幅の時系列信号、RR間隔の時系列信号、角度変位の時系列信号の各々から位相情報を抽出する特徴量抽出部30とを備えている。さらに、呼吸推定装置は、R波振幅の位相情報、RR間隔の位相情報、角度変位の位相情報の各々についてノイズを濾した位相情報を推定するカルマンフィルタ31と、カルマンフィルタ31で得られたR波振幅の推定位相値、RR間隔の推定位相値、角度変位の推定位相値を重み付け平均化することによりデータを統合する統合処理部32と、統合処理部32で統合された位相値を周波数に変換した結果を、被験者の呼吸周波数とする呼吸周波数変換部33とを備えている。
図16に本実施例におけるカルマンフィルタ処理後の推定位相を示す。70はカルマンフィルタ31に入力される測定値(位相値)を示し、71はカルマンフィルタ31から出力される推定値(位相値)を示し、72は位相の理想直線を示している。測定値に対して推定値は理想直線との誤差が小さくなっており,測定値では標準誤差0.5663(rad)に対して、フィルタ処理後の推定値では標準誤差が0.2711(rad)となっている。
Claims (13)
- 被験者の心機能に関する第1のデータの時系列信号と前記被験者の呼吸運動による加速度に関する第2のデータの時系列信号の各々から前記被験者の呼吸数をそれぞれ推定する第1のステップと、
前記第1のデータから推定した呼吸数と前記第2のデータから推定した呼吸数の各々についてカルマンフィルタによりノイズを濾した呼吸数をそれぞれ推定する第2のステップと、
この第2のステップで得られた複数の呼吸数の推定値の重み付け平均化処理を実行する第3のステップと、
前記第1のデータと前記第2のデータの各々の信頼度を示すエラー係数をそれぞれ測定する第4のステップと、
前記エラー係数に基づいて重み付け行列の成分である重み付け定数を求める第5のステップと、
前記カルマンフィルタの推定誤差が最小となるように前記カルマンフィルタの共分散推定誤差行列を更新する第6のステップと、
前記重み付け行列と前記共分散推定誤差行列とに基づいて前記カルマンフィルタのカルマン利得を更新する第7のステップとを含むことを特徴とする呼吸推定方法。 - 請求項1記載の呼吸推定方法において、
前記第7のステップは、測定系雑音の共分散行列を前記重み付け行列に応じて調整し、調整後の共分散行列を用いて前記カルマン利得を算出するステップを含むことを特徴とする呼吸推定方法。 - 被験者の心機能に関する第1のデータの時系列信号と前記被験者の呼吸運動による加速度に関する第2のデータの時系列信号の各々から前記被験者の呼吸数をそれぞれ推定する第1のステップと、
前記第1のデータから推定した呼吸数と前記第2のデータから推定した呼吸数の各々についてカルマンフィルタによりノイズを濾した呼吸数をそれぞれ推定する第2のステップと、
この第2のステップで得られた複数の呼吸数の推定値の重み付け平均化処理を実行する第3のステップとを含み、
前記第3のステップは、
前記第1のデータと前記第2のデータの各々に関する前記カルマンフィルタの自乗推定誤差から前記重み付け平均化処理のための重み付け定数を算出するステップと、
このステップで算出した重み付け定数を用いて、前記第1のデータに基づく呼吸数の推定値と前記第2のデータに基づく呼吸数の推定値とを重み付け平均化するステップとを含むことを特徴とする呼吸推定方法。 - 請求項1乃至3のいずれか1項に記載の呼吸推定方法において、
前記第1のステップは、
前記第1のデータの時系列信号と前記第2のデータの時系列信号の各々をフーリエ変換することにより、前記第1のデータと前記第2のデータの各々の信号の周波数スペクトルをそれぞれ求めるステップと、
前記第1のデータから求めた周波数スペクトルと前記第2のデータから求めた周波数スペクトルの各々から前記被験者の呼吸数をそれぞれ推定するステップとを含むことを特徴とする呼吸推定方法。 - 請求項1乃至4のいずれか1項に記載の呼吸推定方法において、
前記第1のデータとして、前記被験者の心電位波形からR波の振幅を検出する第1の検出ステップと、
前記第1のデータとして、前記被験者の心電位波形からR波と1つ前のR波との間隔であるRR間隔を検出する第2の検出ステップと、
前記第2のデータとして、前記被験者の呼吸運動による3軸加速度の信号から加速度ベクトルの角度変位を検出する第3の検出ステップとをさらに含むことを特徴とする呼吸推定方法。 - 被験者の心機能に関する第1のデータの時系列信号と前記被験者の呼吸運動による加速度に関する第2のデータの時系列信号の各々から前記被験者の呼吸数をそれぞれ推定する呼吸数推定部と、
前記第1のデータから推定した呼吸数と前記第2のデータから推定した呼吸数の各々についてノイズを濾した呼吸数をそれぞれ推定するカルマンフィルタと、
このカルマンフィルタで得られた複数の呼吸数の推定値の重み付け平均化処理を実行する統合処理部と、
前記第1のデータと前記第2のデータの各々の信頼度を示すエラー係数をそれぞれ測定するエラー測定部と、
前記エラー係数に基づいて重み付け行列の成分である重み付け定数を求める重み付け定数生成部と、
前記カルマンフィルタの推定誤差が最小となるように前記カルマンフィルタの共分散推定誤差行列を更新する適応推定部と、
前記重み付け行列と前記共分散推定誤差行列とに基づいて前記カルマンフィルタのカルマン利得を更新する重み付け演算部とを備えることを特徴とする呼吸推定装置。 - 被験者の心機能に関する第1のデータの時系列信号と前記被験者の呼吸運動による加速度に関する第2のデータの時系列信号の各々から前記被験者の呼吸数をそれぞれ推定する呼吸数推定部と、
前記第1のデータから推定した呼吸数と前記第2のデータから推定した呼吸数の各々についてノイズを濾した呼吸数をそれぞれ推定するカルマンフィルタと、
このカルマンフィルタで得られた複数の呼吸数の推定値の重み付け平均化処理を実行する統合処理部とを備え、
前記統合処理部は、
前記第1のデータと前記第2のデータの各々に関する前記カルマンフィルタの自乗推定誤差から前記重み付け平均化処理のための重み付け定数を算出する重み付け定数生成処理部と、
この重み付け定数生成処理部によって算出された重み付け定数を用いて、前記第1のデータに基づく呼吸数の推定値と前記第2のデータに基づく呼吸数の推定値とを重み付け平均化する重み付け平均化処理部とから構成されることを特徴とする呼吸推定装置。 - 被験者の心機能に関する第1のデータの時系列信号と前記被験者の呼吸運動による加速度に関する第2のデータの時系列信号の各々から位相情報をそれぞれ抽出する第1のステップと、
前記第1のデータの位相情報と前記第2のデータの位相情報の各々についてカルマンフィルタによりノイズを濾した位相情報をそれぞれ推定する第2のステップと、
この第2のステップで得られた複数の推定位相値の重み付け平均化処理を実行する第3のステップと、
この第3のステップで統合された位相値を周波数に変換することにより、前記被験者の呼吸周波数を求める第4のステップとを含むことを特徴とする呼吸推定方法。 - 請求項8記載の呼吸推定方法において、
前記第1のステップは、
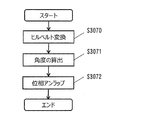
前記第1のデータと前記第2のデータの各々について、時系列信号をヒルベルト変換して実部成分と虚部成分の2つの信号成分をそれぞれ生成するステップと、
前記第1のデータと前記第2のデータの各々について、前記実部成分と前記虚部成分とから角度をそれぞれ算出するステップと、
前記第1のデータと前記第2のデータの各々について、前記角度を連続した位相値にする位相アンラップをそれぞれ行うステップとを含むことを特徴とする呼吸推定方法。 - 請求項8または9記載の呼吸推定方法において、
前記第3のステップは、
前記第1のデータと前記第2のデータの各々に関する前記カルマンフィルタの自乗推定誤差から重み付け定数を算出するステップと、
このステップで算出した重み付け定数を用いて、前記第1のデータの推定位相値と前記第2のデータの推定位相値の重み付け平均化処理を実行するステップとを含むことを特徴とする呼吸推定方法。 - 請求項8乃至10のいずれか1項に記載の呼吸推定方法において、
前記第1のデータの時系列信号と前記第2のデータの時系列信号の各々を、心電位波形のサンプリング周波数および3軸加速度信号のサンプリング周波数よりも遅いサンプリング周波数でそれぞれサンプリングする第5のステップと、
前記第5のステップで取得した前記第1のデータの時系列信号と前記第2のデータの時系列信号の各々をそれぞれ帯域制限する第6のステップとをさらに含み、
前記第1のステップは、前記第6のステップで帯域制限した前記第1のデータの時系列信号と前記第2のデータの時系列信号の各々から位相情報をそれぞれ抽出するステップを含むことを特徴とする呼吸推定方法。 - 請求項8乃至11のいずれか1項に記載の呼吸推定方法において、
前記第1のデータとして、前記被験者の心電位波形からR波の振幅を検出する第1の検出ステップと、
前記第1のデータとして、前記被験者の心電位波形からR波と1つ前のR波との間隔であるRR間隔を検出する第2の検出ステップと、
前記加速度データとして、前記被験者の呼吸運動による3軸加速度の信号から加速度ベクトルの角度変位を検出する第3の検出ステップとをさらに含むことを特徴とする呼吸推定方法。 - 被験者の心機能に関する第1のデータの時系列信号と前記被験者の呼吸運動による加速度に関する第2のデータの時系列信号の各々から位相情報をそれぞれ抽出する特徴量抽出部と、
この特徴量抽出部で得られた前記第1のデータの位相情報と前記第2のデータの位相情報の各々についてノイズを濾した位相情報をそれぞれ推定するカルマンフィルタと、
このカルマンフィルタで得られた前記第1のデータの推定位相値と前記第2のデータの推定位相値の重み付け平均化処理を実行する統合処理部と、
この統合処理部で統合された位相値を周波数に変換することにより、前記被験者の呼吸周波数を求める呼吸周波数変換部とを備えることを特徴とする呼吸推定装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015229360 | 2015-11-25 | ||
| JP2015229360 | 2015-11-25 | ||
| JP2016149625 | 2016-07-29 | ||
| JP2016149625 | 2016-07-29 | ||
| PCT/JP2016/084978 WO2017090732A1 (ja) | 2015-11-25 | 2016-11-25 | 呼吸推定方法および装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017090732A1 JPWO2017090732A1 (ja) | 2018-04-26 |
| JP6553741B2 true JP6553741B2 (ja) | 2019-07-31 |
Family
ID=58763853
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017552730A Active JP6553741B2 (ja) | 2015-11-25 | 2016-11-25 | 呼吸推定方法および装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11234613B2 (ja) |
| EP (1) | EP3381364B1 (ja) |
| JP (1) | JP6553741B2 (ja) |
| WO (1) | WO2017090732A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11076793B2 (en) * | 2015-11-10 | 2021-08-03 | Nippon Telegraph And Telephone Corporation | Respiration estimation method and apparatus |
| EP3445444A1 (en) | 2016-04-19 | 2019-02-27 | Inspire Medical Systems, Inc. | Accelerometer-based sensing for sleep disordered breathing (sdb) care |
| JP6848393B2 (ja) * | 2016-11-25 | 2021-03-24 | コニカミノルタ株式会社 | 動態画像処理装置 |
| JP7078108B2 (ja) * | 2018-04-12 | 2022-05-31 | 日本電信電話株式会社 | 最大心拍数推定方法および装置 |
| JP7094916B2 (ja) * | 2019-05-09 | 2022-07-04 | ミネベアミツミ株式会社 | 生体情報モニタリングシステム、生体情報モニタリング方法、及びベッドシステム |
| US20200390400A1 (en) * | 2019-06-17 | 2020-12-17 | Caire Diagnostics Inc. | Asthma Management System & Method |
| JP2022542581A (ja) | 2019-07-25 | 2022-10-05 | インスパイア・メディカル・システムズ・インコーポレイテッド | 検知された姿勢情報に基づいて植込み型医療デバイスを操作するためのシステムおよび方法 |
| CN111693685B (zh) * | 2020-05-18 | 2022-06-17 | 中国科学院苏州生物医学工程技术研究所 | 血栓弹力信号提取方法、存储介质及计算机设备 |
| WO2021250794A1 (ja) * | 2020-06-10 | 2021-12-16 | 日本電信電話株式会社 | 生体情報処理装置、生体情報処理方法及び生体情報処理プログラム |
| JP7420264B2 (ja) * | 2020-08-19 | 2024-01-23 | 日本電信電話株式会社 | 見守り方法、見守りプログラムおよび見守り装置 |
| CN114052708A (zh) * | 2021-11-17 | 2022-02-18 | 南方医科大学南方医院 | 一种医用呼吸频率检测装置 |
| CN116077050B (zh) * | 2023-01-30 | 2024-07-19 | 青岛海尔科技有限公司 | 呼吸诊断方法、装置、存储介质及电子装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2900009B2 (ja) | 1992-12-18 | 1999-06-02 | シャープ株式会社 | 環境データ収集システム |
| JP4571317B2 (ja) * | 1999-06-01 | 2010-10-27 | マサチューセッツ インスティテュート オブ テクノロジー | 無加圧帯式連続血圧監視装置 |
| WO2002024065A1 (en) * | 2000-09-22 | 2002-03-28 | Knobbe, Lim & Buckingham | Method and apparatus for real-time estimation and control of pysiological parameters |
| JP2003000561A (ja) | 2001-06-18 | 2003-01-07 | Canon Inc | R波認識方法及びr−r間隔測定方法及び心拍数測定方法及びr−r間隔測定装置及び心拍数測定装置 |
| GB0130010D0 (en) | 2001-12-14 | 2002-02-06 | Isis Innovation | Combining measurements from breathing rate sensors |
| JP4528583B2 (ja) * | 2004-08-31 | 2010-08-18 | 株式会社山武 | 生体負荷検査装置 |
| JP2008085608A (ja) | 2006-09-27 | 2008-04-10 | Ricoh Elemex Corp | 集中検針システム及び集中検針装置 |
| EP2078270B1 (en) * | 2006-11-01 | 2017-11-29 | ResMed Sensor Technologies Limited | System and method for monitoring cardiorespiratory parameters |
| US8843321B2 (en) * | 2010-01-26 | 2014-09-23 | Roche Diagnostics Operations, Inc. | Methods and systems for processing glucose data measured from a person having diabetes |
| JP5659644B2 (ja) | 2010-09-13 | 2015-01-28 | 三菱化学株式会社 | 情報処理方法,情報処理システム,情報処理装置,情報処理用プログラムおよび同プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP5919722B2 (ja) * | 2011-10-18 | 2016-05-18 | 株式会社豊田中央研究所 | 生体信号推定装置及びプログラム |
| JP2013140529A (ja) | 2012-01-06 | 2013-07-18 | Sony Corp | 情報処理装置、情報処理方法及びプログラム |
| JP5608696B2 (ja) | 2012-03-07 | 2014-10-15 | 株式会社日立製作所 | 水使用状況監視システム |
| US9872634B2 (en) * | 2013-02-08 | 2018-01-23 | Vital Connect, Inc. | Respiratory rate measurement using a combination of respiration signals |
| WO2015049150A1 (en) * | 2013-10-01 | 2015-04-09 | Koninklijke Philips N.V. | Improved signal selection for obtaining a remote photoplethysmographic waveform |
| JP2015083045A (ja) | 2013-10-25 | 2015-04-30 | 日本電信電話株式会社 | ウェアラブル電極、生体電気信号取得システムおよび生体電気信号取得方法 |
| US10045291B2 (en) | 2014-07-16 | 2018-08-07 | Itron Global Sarl | Relay functionality of battery powered devices |
-
2016
- 2016-11-25 EP EP16868675.6A patent/EP3381364B1/en active Active
- 2016-11-25 JP JP2017552730A patent/JP6553741B2/ja active Active
- 2016-11-25 WO PCT/JP2016/084978 patent/WO2017090732A1/ja unknown
- 2016-11-25 US US15/778,750 patent/US11234613B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3381364A4 (en) | 2019-10-16 |
| EP3381364A1 (en) | 2018-10-03 |
| US11234613B2 (en) | 2022-02-01 |
| US20180344208A1 (en) | 2018-12-06 |
| EP3381364B1 (en) | 2023-03-29 |
| WO2017090732A1 (ja) | 2017-06-01 |
| JPWO2017090732A1 (ja) | 2018-04-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6553741B2 (ja) | 呼吸推定方法および装置 | |
| JP6557219B2 (ja) | 生理信号を処理する処理装置、処理方法及びシステム | |
| CN105451652B (zh) | 用于确定对象的呼吸信号的处理装置和处理方法 | |
| EP2953527B1 (en) | Respiratory rate measurement | |
| KR101656611B1 (ko) | 무구속적으로 측정한 생체신호를 이용하여 산소탈포화지수를 획득하는 방법 | |
| CN109414204A (zh) | 用于确定针对对象的呼吸信息的方法和装置 | |
| CN102551699B (zh) | 非侵入性心输出量确定的系统 | |
| JP6310401B2 (ja) | 生理的リズムを表す信号を処理する方法、システム及びコンピュータプログラム | |
| EP3133985B1 (en) | A method and a device for non invasive blood pressure measurement | |
| Rehman et al. | Survey of wearable sensors with comparative study of noise reduction ecg filters | |
| Rehman et al. | Analytical survey of wearable sensors | |
| WO2014147939A1 (ja) | 生体信号計測システム、装置、方法およびそのプログラム | |
| EP3375368B1 (en) | Respiration frequency estimating method and device | |
| JP7307185B2 (ja) | 心臓血管信号の取得、融合、およびノイズの軽減のための方法 | |
| Gardner et al. | Estimation of heart rate during sleep measured from a gyroscope embedded in a CPAP mask | |
| Mohammadi-Koushki et al. | A wearable device for continuous cardiorespiratory System Monitoring | |
| Coulter et al. | Low power IoT platform for vital signs monitoring | |
| JP2019154482A (ja) | 疲労度推定方法、疲労度推定装置およびプログラム | |
| Lim et al. | A Study on a Healthcare System Using Smart Clothes | |
| US20230009478A1 (en) | Estimation of tidal volume using load cells on a hospital bed | |
| JP7217470B2 (ja) | 心拍信号検出装置、及び心拍信号検出プログラム | |
| JP2018011753A (ja) | 呼吸推定方法および装置 | |
| Reddy et al. | A Novel Breathing Rate Estimation Framework Using 3 Distinct Types of Signals | |
| Ansari et al. | Extraction of respiratory rate from impedance signal measured on arm: A portable respiratory rate measurement device | |
| WO2024047651A1 (en) | System and method for sensors integration for non-static continuous blood pressure monitoring |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190702 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190704 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6553741 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |