JP6541558B2 - データ転送装置を有する掘削機 - Google Patents
データ転送装置を有する掘削機 Download PDFInfo
- Publication number
- JP6541558B2 JP6541558B2 JP2015232882A JP2015232882A JP6541558B2 JP 6541558 B2 JP6541558 B2 JP 6541558B2 JP 2015232882 A JP2015232882 A JP 2015232882A JP 2015232882 A JP2015232882 A JP 2015232882A JP 6541558 B2 JP6541558 B2 JP 6541558B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- rotary connection
- cutter
- excavator
- data transfer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Excavating Of Shafts Or Tunnels (AREA)
Description
1a センタービット
1b ローラカッタ
1c ビット
1d スクレーパツース
1e 開口部
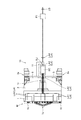
1r 回転軸
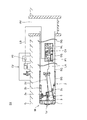
2 機器本体
2a カッタ駆動部
2b 中折れジャッキ
2c シールドジャッキ
2d スクリューコンベヤ
3 チャンバ
5 隔壁
10 データ転送装置
11 ブラケット
12 無線送信装置
13 無線受信装置
SY 掘削システム
M 掘削機
G 地盤
HL 掘削坑
HV 立坑
LA 配線
C1 第1の制御室
C2 第2の制御室
P1 第1のPLC装置
P2 第2のPLC装置
S センサ
SC,SC1,SC2 変換装置
RJ 回転接続装置
LA,LB 配線
LA1 配線
LA2 配線
LA3 伝送ケーブル
LA4 伝送ケーブル
Ls 信号配線
Lp 電源配線
St1 シース
St2 内部シース
Claims (6)
- 機器本体の前面に回転可能な状態で装着され切羽を掘削するカッタ盤と、
前記機器本体と前記カッタ盤との間に設けられ、前記カッタ盤の開口部を通じて取り込まれた掘削土砂を収容する収容部と、
前記収容部と前記機器本体の内部とを隔てる隔壁と、
前記カッタ盤の径方向中心に、前記カッタ盤から前記収容部および前記隔壁を貫通し、前記機器本体の内部まで延在した状態で設けられ、前記カッタ盤とともに回転する回転軸と、
前記カッタ盤側で検出されたデータを情報処理装置に転送するデータ転送装置と、
を備え、
前記データ転送装置は、
前記カッタ盤に設けられ、前記カッタ盤側のデータを検出する複数個のセンサと、
前記回転軸の前記カッタ盤とは反対側の端部において、前記複数個のセンサと電気的に接続された状態で設けられ、前記複数個のセンサから伝送された第1のデータをシリアル通信が可能なように第2のデータに変換する変換装置と、
前記機器本体の内部において前記変換装置と前記情報処理装置との間に電気的に接続された状態で設けられ、前記回転軸とともに回転する前記変換装置から伝送された前記第2のデータを固定体側の引出電極を通じて前記情報処理装置へシリアル通信で伝送する回転接続装置と、
を備えることを特徴とするデータ転送装置を有する掘削機。 - 前記回転接続装置は、前記固定体側の引出電極としてブラシ接点を有するスリップリングであることを特徴とする請求項1記載のデータ転送装置を有する掘削機。
- 前記回転接続装置は、前記固定体側の引出電極として液体接点を有するロータリコネクタであることを特徴とする請求項1記載のデータ転送装置を有する掘削機。
- 前記回転接続装置と前記情報処理装置とが有線で電気的に接続されることを特徴とする請求項1、2または3記載のデータ転送装置を有する掘削機。
- 前記回転接続装置と前記情報処理装置とが無線で電気的に接続されることを特徴とする請求項1、2または3記載のデータ転送装置を有する掘削機。
- 前記変換装置は、前記情報処理装置から前記回転接続装置を介してシリアル通信で伝送されたセンサ制御用のデータをパラレルデータに変換して前記複数のセンサのうちの所定のセンサに伝送する機能を有することを特徴とする請求項1〜5のいずれか1項に記載のデータ転送装置を有する掘削機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015232882A JP6541558B2 (ja) | 2015-11-30 | 2015-11-30 | データ転送装置を有する掘削機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015232882A JP6541558B2 (ja) | 2015-11-30 | 2015-11-30 | データ転送装置を有する掘削機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017101388A JP2017101388A (ja) | 2017-06-08 |
| JP6541558B2 true JP6541558B2 (ja) | 2019-07-10 |
Family
ID=59016324
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015232882A Active JP6541558B2 (ja) | 2015-11-30 | 2015-11-30 | データ転送装置を有する掘削機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6541558B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107560741B (zh) * | 2017-10-18 | 2020-04-21 | 华北水利水电大学 | 一种盾构滚刀温度检测装置及方法 |
| JP7519957B2 (ja) | 2021-06-01 | 2024-07-22 | 鹿島建設株式会社 | シールド掘進機の掘削状態検出システム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01177121A (ja) * | 1988-01-07 | 1989-07-13 | Fujitsu Ten Ltd | Ad変換装置とのシリアル通信方式 |
| JPH0781494B2 (ja) * | 1990-02-05 | 1995-08-30 | 株式会社フジタ | シールドマシンの方向制御装置 |
| JPH03260291A (ja) * | 1990-03-09 | 1991-11-20 | Komatsu Ltd | 地中堀削機のデータ伝送装置およびその伝送方法 |
| JP2734767B2 (ja) * | 1990-10-08 | 1998-04-02 | 富士写真光機株式会社 | メカニカルラジアル走査式超音波診断装置 |
| JPH06207492A (ja) * | 1993-01-11 | 1994-07-26 | Komatsu Ltd | 小口径管推進機の先導管制御装置 |
| JP3675576B2 (ja) * | 1996-07-09 | 2005-07-27 | 株式会社奥村組 | 地盤判定装置 |
| JPH10222100A (ja) * | 1997-02-06 | 1998-08-21 | Daiichi Denki Sangyo Kk | 画像表示装置 |
| JP2004190417A (ja) * | 2002-12-13 | 2004-07-08 | Daiho Constr Co Ltd | 含水土砂の脱水処理方法および脱水処理装置 |
| JP6168868B2 (ja) * | 2012-06-29 | 2017-07-26 | キヤノン株式会社 | 力覚センサ及び力覚センサを備えたロボットアーム |
| JP5986922B2 (ja) * | 2012-12-27 | 2016-09-06 | 日立造船株式会社 | トンネル掘進機の掘削状況監視システム |
| JP6273140B2 (ja) * | 2013-12-25 | 2018-01-31 | 川崎重工業株式会社 | ローラーカッター機構 |
-
2015
- 2015-11-30 JP JP2015232882A patent/JP6541558B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017101388A (ja) | 2017-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2439318C2 (ru) | Скважинная коммуникационная система и способ | |
| US8581741B2 (en) | Communication system for a hydrocarbon extraction plant | |
| CA1123051A (en) | Pipe section for use in a borehole | |
| CN101691841B (zh) | 用于石油井下三维声波信号接收传感器阵列的电路 | |
| JP6541558B2 (ja) | データ転送装置を有する掘削機 | |
| US8162044B2 (en) | Systems and methods for providing electrical transmission in downhole tools | |
| CN105891890A (zh) | 一种盾构搭载的非接触式频域电法实时超前探测系统与方法 | |
| GB2484055B (en) | Slip ring apparatus for a rotary steerable tool | |
| CN104600484B (zh) | 一种新型水下电连接器插拔导引结构 | |
| JPS6149096A (ja) | 遠隔情報伝送装置 | |
| CN114607347B (zh) | 基于中空螺杆钻具的煤矿井下近钻头多参数随钻测量系统 | |
| CN105283624A (zh) | 用于井下钻井设备的绝缘导体 | |
| CN206432999U (zh) | 井下双向通讯装置 | |
| CN103715581B (zh) | 一种tbm搭载的超前地质探测仪器的集成接线装置 | |
| US10570902B2 (en) | Band-gap communications across a well tool with a modified exterior | |
| CN200941524Y (zh) | 一种闭式导电滑环 | |
| CN106357500A (zh) | 一种随钻系统的单总线通信设备及其单总线通信方法 | |
| CN104481894A (zh) | 离心式潜油电泵井下扭矩测试系统 | |
| US11927090B2 (en) | Horizontal directional drilling system and method | |
| CN202771011U (zh) | 过套管电阻率电极探头 | |
| CN104832164A (zh) | 一种有线随钻测量工具 | |
| AU2016222080B2 (en) | Double drill rod section, double drill rod length and method of producing an electrically conductive connection in a double drill rod section | |
| RU2190097C2 (ru) | Телеметрическая система для каротажа в процессе бурения | |
| CN103763004A (zh) | 利用海底管道进行通信的方法及通信系统 | |
| CN208476224U (zh) | 一种三基点顶板离层监测仪 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190308 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190419 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190611 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6541558 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |