JP6539228B2 - 車両制御装置、及び車両制御方法 - Google Patents
車両制御装置、及び車両制御方法 Download PDFInfo
- Publication number
- JP6539228B2 JP6539228B2 JP2016112096A JP2016112096A JP6539228B2 JP 6539228 B2 JP6539228 B2 JP 6539228B2 JP 2016112096 A JP2016112096 A JP 2016112096A JP 2016112096 A JP2016112096 A JP 2016112096A JP 6539228 B2 JP6539228 B2 JP 6539228B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- detected
- distance
- vehicle control
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 6
- 230000004927 fusion Effects 0.000 claims description 105
- 230000007704 transition Effects 0.000 claims description 13
- 238000001514 detection method Methods 0.000 claims description 9
- 238000013459 approach Methods 0.000 description 18
- 238000003384 imaging method Methods 0.000 description 8
- 230000007423 decrease Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/172—Determining control parameters used in the regulation, e.g. by calculations involving measured or detected parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
- B60T2201/022—Collision avoidance systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B60W2420/408—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/20—Static objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
Description
以下、各実施形態を図面に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付しており、同一符号の部分についてはその説明を援用する。
次に、第2実施形態について、上記第1実施形態との相違点を中心に説明する。上記第1実施形態では、画像物標GTがロストした時点で物体との距離が近距離である場合に、車両制御としてスピーカ、シートベルト、ブレーキ等を作動させる形態としたが、第2実施形態では、かかる場合に、ブレーキを作動させて物体との衝突回避を図る形態とする。
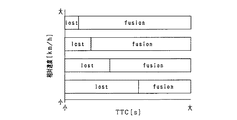
(1)FPBが作動した後、FPBの作動状態下でPBが作動するシーン、
(2)FPBが作動した後FPBが一旦終了し、続いてPBが作動するシーン、
(3)側方からの歩行者等の急な進入によって、PBの作動が禁止されるシーン、
の各シーンについてPB作動の状態を説明する。このうち、図6,8,10は、TTC(衝突余裕時間)を縦軸とし、自車両の車幅方向における自車両に対する横位置を横軸とした平面図を示している。縦軸には、FPBの作動タイミングTh7と、PBの作動タイミングTh8を設けている。この場合、物体に対するTTCが、PB又はFPBのそれぞれの閾値を下回ることで、それぞれの作動タイミングであると判定される。
Claims (16)
- 搬送波の反射波として取得される自車両前方の物体の第1物標情報と、自車両前方の所定範囲を撮影した撮影画像の画像処理で取得される前記物体の第2物標情報とをフュージョンしてフュージョン物標を生成し、前記フュージョン物標として検出された前記物体に自車両が衝突するまでの衝突余裕時間が作動タイミングとなった際に自車両の車両制御を行う車両制御装置(10)であって、
前記物体が前記フュージョン物標で検出される状態から前記物体が前記第1物標情報のみで検出される状態に遷移したか否かを判定する状態判定部と、
前記状態判定部により、前記第1物標情報のみで前記物体が検出される状態に遷移したと判定された際の前記物体との距離が、前記所定範囲から前記物体の下端側の一部が外れる所定の近距離であるか否かを判定する距離判定部と、
前記距離判定部により、前記物体との距離が所定の近距離であると判定された場合に、前記第1物標情報のみで検出される前記物体に対する前記衝突余裕時間が前記作動タイミングとなった際に、前記物体に対する車両制御を実施し、前記距離判定部により、前記物体との距離が所定の近距離でないと判定された場合に、前記第1物標情報のみで検出される前記物体に対する前記衝突余裕時間が前記作動タイミングとなったとしても、前記物体に対する車両制御を実施しない車両制御部と、
を備えることを特徴とする車両制御装置。 - 前記物体の車幅方向の横位置を取得する横位置取得部を備え、
前記車両制御部は、前記物体との距離が所定の近距離であると判定された時点で、前記横位置取得部により取得された前記物体の車幅方向の横位置が、自車両に対して所定の接近状態であれば、前記物体に対する車両制御を実施する請求項1に記載の車両制御装置。 - 前記横位置取得部は、前記フュージョン物標として前記物体が検出されている状態から前記第1物標情報のみで前記物体が検出される状態に遷移したと判定された後は、前記第1物標情報を用いて前記物体の車幅方向の横位置を取得する請求項2に記載の車両制御装置。
- 前記横位置取得部は、前記フュージョン物標として前記物体が検出されている状態から前記第1物標情報のみで前記物体が検出される状態に遷移する場合に、その遷移直前の前記フュージョン物標を用いて前記物体の第1横位置を取得するとともに、遷移直後の前記第1物標情報を用いて前記物体の第2横位置を取得するものであって、
前記車両制御部は、前記第1横位置と前記第2横位置との差が所定以上となる際に、前記物体に対する車両制御を実施しない請求項3に記載の車両制御装置。 - 搬送波の反射波として取得される自車両前方の物体の第1物標情報と、自車両前方の撮影画像の画像処理で取得される前記物体の第2物標情報とをフュージョンしてフュージョン物標を生成し、前記フュージョン物標として検出された前記物体に対する自車両の車両制御を行う車両制御装置(10)であって、
前記物体が前記フュージョン物標で検出される状態から前記物体が前記第1物標情報のみで検出される状態に遷移したか否かを判定する状態判定部と、
前記状態判定部により、前記第1物標情報のみで前記物体が検出される状態に遷移したと判定された際の前記物体との距離が所定の近距離であるか否かを判定する距離判定部と、
前記距離判定部により、前記物体との距離が所定の近距離であると判定された際に、前記物体に対する車両制御を実施する車両制御部と、
前記物体の車幅方向の横位置を取得する横位置取得部と、
を備え、
前記車両制御部は、前記物体との距離が所定の近距離であると判定された時点で、前記横位置取得部により取得された前記物体の車幅方向の横位置が、自車両に対して所定の接近状態であれば、前記物体に対する車両制御を実施し、
前記横位置取得部は、前記フュージョン物標として前記物体が検出されている状態から前記第1物標情報のみで前記物体が検出される状態に遷移する場合に、その遷移直前の前記フュージョン物標を用いて前記物体の車幅方向の第1横位置を取得するとともに、遷移直後の前記第1物標情報を用いて前記物体の車幅方向の第2横位置を取得するものであって、
前記車両制御部は、前記第1横位置と前記第2横位置との差が所定以上となる際に、前記物体に対する車両制御を実施しないことを特徴とする車両制御装置。 - 前記物体と自車両との相対速度を判定する相対速度判定部を備え、
前記車両制御部は、前記物体と自車両との相対速度が所定値よりも小さいことを条件として、前記物体が所定の近距離の位置にあると判定された際に、前記物体に対する車両制御を実施する請求項1乃至5のいずれか1項に記載の車両制御装置。 - 搬送波の反射波として取得される自車両前方の物体の第1物標情報と、自車両前方の撮影画像の画像処理で取得される前記物体の第2物標情報とをフュージョンしてフュージョン物標を生成し、前記フュージョン物標として検出された前記物体に対する自車両の車両制御を行う車両制御装置(10)であって、
前記物体が前記フュージョン物標で検出される状態から前記物体が前記第1物標情報のみで検出される状態に遷移したか否かを判定する状態判定部と、
前記状態判定部により、前記第1物標情報のみで前記物体が検出される状態に遷移したと判定された際の前記物体との距離が所定の近距離であるか否かを判定する距離判定部と、
前記距離判定部により、前記物体との距離が所定の近距離であると判定された際に、前記物体に対する車両制御を実施する車両制御部と、
前記物体と自車両との相対速度を判定する相対速度判定部と、
を備え、
前記車両制御部は、前記物体と自車両との相対速度が所定値よりも小さいことを条件として、前記物体が所定の近距離の位置にあると判定された際に、前記物体に対する車両制御を実施することを特徴とする車両制御装置。 - 前記フュージョン物標として前記物体が検出されており、前記物体に対する車両制御が実施されている状況下で、前記物体が前記第1物標情報のみで検出される状態に遷移したと判定された場合には、前記物体に対する車両制御を継続する請求項1乃至7のいずれか1項に記載の車両制御装置。
- 前記フュージョン物標として前記物体が検出されている状態から前記第1物標情報のみで前記物体が検出される状態に遷移してから所定時間の経過後は、前記物体との距離が所定の近距離であることに関わらず、前記物体に対する車両制御を実施しない請求項1乃至8のいずれか1項に記載の車両制御装置。
- 搬送波の反射波として取得される自車両前方の物体の第1物標情報と、自車両前方の撮影画像の画像処理で取得される前記物体の第2物標情報とをフュージョンしてフュージョン物標を生成し、前記フュージョン物標として検出された前記物体に対する自車両の車両制御を行う車両制御装置(10)であって、
前記物体が前記フュージョン物標で検出される状態から前記物体が前記第1物標情報のみで検出される状態に遷移したか否かを判定する状態判定部と、
前記状態判定部により、前記第1物標情報のみで前記物体が検出される状態に遷移したと判定された際の前記物体との距離が所定の近距離であるか否かを判定する距離判定部と、
前記距離判定部により、前記物体との距離が所定の近距離であると判定された際に、前記物体に対する車両制御を実施する車両制御部と、
を備え、
前記フュージョン物標として前記物体が検出されている状態から前記第1物標情報のみで前記物体が検出される状態に遷移してから所定時間の経過後は、前記物体との距離が所定の近距離であることに関わらず、前記物体に対する車両制御を実施しないことを特徴とする車両制御装置。 - 前記車両制御部は、前記物体との距離が所定の近距離ではないと判定された際には、前記物体に対する車両制御を実施しない請求項1乃至10のいずれか1項に記載の車両制御装置。
- 前記車両制御として、前記物体に対する衝突余裕度である第1余裕度に基づいて一次ブレーキ制御を実施するとともに、前記第1余裕度よりも衝突余裕度の小さい第2余裕度に基づいて二次ブレーキ制御を実施する車両制御装置であって、
前記車両制御部は、前記距離判定部により前記物体との距離が所定の近距離であると判定された時点において、前記一次ブレーキ制御が実施されていること、又は前記一次ブレーキ制御が直前所定時間内に終了された履歴があることを条件に、前記二次ブレーキ制御を実施する請求項1乃至11のいずれか1項に記載の車両制御装置。 - 前記車両制御部は、前記距離判定部により前記物体との距離が所定の近距離であると判定された時点において、前記一次ブレーキ制御が実施されておらず、かつ、前記履歴がない場合は、前記二次ブレーキ制御を実施しない請求項12に記載の車両制御装置。
- 搬送波の反射波として取得される自車両前方の物体の第1物標情報と、自車両前方の撮影画像の画像処理で取得される前記物体の第2物標情報とをフュージョンしてフュージョン物標を生成し、前記フュージョン物標として検出された前記物体に対する自車両の車両制御を行う車両制御装置(10)であって、
前記物体が前記フュージョン物標で検出される状態から前記物体が前記第1物標情報のみで検出される状態に遷移したか否かを判定する状態判定部と、
前記状態判定部により、前記第1物標情報のみで前記物体が検出される状態に遷移したと判定された際の前記物体との距離が所定の近距離であるか否かを判定する距離判定部と、
前記距離判定部により、前記物体との距離が所定の近距離であると判定された際に、前記物体に対する車両制御を実施する車両制御部と、
を備え、
前記車両制御として、前記物体に対する衝突余裕度である第1余裕度に基づいて一次ブレーキ制御を実施するとともに、前記第1余裕度よりも衝突余裕度の小さい第2余裕度に基づいて二次ブレーキ制御を実施する車両制御装置であって、
前記車両制御部は、前記距離判定部により前記物体との距離が所定の近距離であると判定された時点において、前記一次ブレーキ制御が実施されていること、又は前記一次ブレーキ制御が直前所定時間内に終了された履歴があることを条件に、前記二次ブレーキ制御を実施し、前記距離判定部により前記物体との距離が所定の近距離であると判定された時点において、前記一次ブレーキ制御が実施されておらず、かつ、前記履歴がない場合は、前記二次ブレーキ制御を実施しないことを特徴とする車両制御装置。 - 前記物体が歩行者であることを判定する歩行者判定部を備え、
前記車両制御部は、前記物体が歩行者であると判定された場合に、前記二次ブレーキ制御の実施を許可する請求項12乃至14のいずれか1項に記載の車両制御装置。 - 搬送波の反射波として取得される自車両前方の物体の第1物標情報と、自車両前方の所定範囲を撮影した撮影画像の画像処理で取得される前記物体の第2物標情報とをフュージョンしてフュージョン物標を生成するステップと、前記フュージョン物標として検出された前記物体に自車両が衝突するまでの衝突余裕時間が作動タイミングとなった際に自車両の車両制御を行うステップとを備え、
前記物体が前記フュージョン物標で検出される状態から前記物体が第1物標情報のみで検出される状態に遷移したか否かを判定するステップと、
前記第1物標情報のみで前記物体が検出される状態に遷移したと判定された際の前記物体との距離が、前記所定範囲から前記物体の下端側の一部が外れる所定の近距離であるか否かを判定するステップと、
前記物体との距離が所定の近距離であると判定された場合に、前記第1物標情報のみで検出される前記物体に対する前記衝突余裕時間が前記作動タイミングとなった際に、前記物体に対する車両制御を実施し、前記物体との距離が所定の近距離でないと判定された場合に、前記第1物標情報のみで検出される前記物体に対する前記衝突余裕時間が前記作動タイミングとなったとしても、前記物体に対する車両制御を実施しないステップと、
を備えることを特徴とする車両制御方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/067896 WO2016204213A1 (ja) | 2015-06-16 | 2016-06-16 | 車両制御装置、及び車両制御方法 |
| DE112016002750.8T DE112016002750T5 (de) | 2015-06-16 | 2016-06-16 | Fahrzeugsteuerungsvorrichtung und fahrzeugsteuerungsverfahren |
| CN201680035181.9A CN107848530B (zh) | 2015-06-16 | 2016-06-16 | 车辆控制装置以及车辆控制方法 |
| US15/736,661 US10573180B2 (en) | 2015-06-16 | 2016-06-16 | Vehicle control device and vehicle control method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015121397 | 2015-06-16 | ||
| JP2015121397 | 2015-06-16 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017010539A JP2017010539A (ja) | 2017-01-12 |
| JP2017010539A5 JP2017010539A5 (ja) | 2017-11-02 |
| JP6539228B2 true JP6539228B2 (ja) | 2019-07-03 |
Family
ID=57761670
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016112096A Active JP6539228B2 (ja) | 2015-06-16 | 2016-06-03 | 車両制御装置、及び車両制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10573180B2 (ja) |
| JP (1) | JP6539228B2 (ja) |
| CN (1) | CN107848530B (ja) |
| DE (1) | DE112016002750T5 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180096612A1 (en) * | 2016-10-05 | 2018-04-05 | Passur Aerospace, Inc. | Device, System, and Method for Gate Optimization |
| US10232849B2 (en) * | 2017-01-23 | 2019-03-19 | Ford Global Technologies, Llc | Collision mitigation and avoidance |
| KR102565533B1 (ko) * | 2017-06-14 | 2023-08-10 | 모빌아이 비젼 테크놀로지스 엘티디. | 자율 주행을 위한 항법 정보의 융합 프레임워크 및 배치 정렬 |
| JP7111454B2 (ja) * | 2017-09-28 | 2022-08-02 | 株式会社デンソー | 制御対象車両設定装置、制御対象車両設定システムおよび制御対象車両設定方法 |
| KR102448164B1 (ko) * | 2018-07-20 | 2022-09-28 | 현대모비스 주식회사 | 차량용 레이더 제어 장치 및 방법 |
| DE102018120923A1 (de) * | 2018-08-28 | 2020-03-05 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Unterstützen eines Fahrers eines Fahrzeugs |
| WO2020100569A1 (ja) * | 2018-11-14 | 2020-05-22 | ソニー株式会社 | 制御装置、制御方法及びセンサ制御システム |
| KR102555916B1 (ko) * | 2018-12-12 | 2023-07-17 | 현대자동차주식회사 | Odm 정보 신뢰성 판단 장치 및 그의 판단 방법과 그를 이용하는 차량 |
| JP7171425B2 (ja) * | 2018-12-27 | 2022-11-15 | フォルシアクラリオン・エレクトロニクス株式会社 | 移動量推定装置 |
| CN109598948A (zh) * | 2019-01-16 | 2019-04-09 | 谢宝建 | 一种新型车辆自动分段限速解决方案 |
| CN110435642A (zh) * | 2019-08-06 | 2019-11-12 | 吉利汽车研究院(宁波)有限公司 | 数据融合方法、装置及存储介质 |
| JP7334572B2 (ja) * | 2019-10-14 | 2023-08-29 | 株式会社デンソー | 物体検知装置および物体検知プログラム |
| CN111169473B (zh) * | 2019-12-19 | 2021-06-25 | 北京联合大学 | 一种基于GroundTruth的车体语言交互数据融合方法及系统 |
| DE102020105192B4 (de) * | 2020-02-27 | 2022-03-10 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Detektieren bewegter Objekte in einer Fahrzeugumgebung und Kraftfahrzeug |
| CN111539278A (zh) * | 2020-04-14 | 2020-08-14 | 浙江吉利汽车研究院有限公司 | 一种用于目标车辆的检测方法及系统 |
| JP7318600B2 (ja) * | 2020-07-06 | 2023-08-01 | トヨタ自動車株式会社 | 車両及び他車両の認識方法 |
| US11738682B2 (en) * | 2020-10-08 | 2023-08-29 | Motional Ad Llc | Communicating vehicle information to pedestrians |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3896757B2 (ja) | 2000-03-16 | 2007-03-22 | 株式会社日立製作所 | 車両制御方法及び車両制御装置 |
| JP4294450B2 (ja) | 2003-11-19 | 2009-07-15 | 富士重工業株式会社 | 車両用運転支援装置 |
| JP4595833B2 (ja) * | 2006-02-24 | 2010-12-08 | トヨタ自動車株式会社 | 物体検出装置 |
| JP4211809B2 (ja) | 2006-06-30 | 2009-01-21 | トヨタ自動車株式会社 | 物体検出装置 |
| JP4909030B2 (ja) * | 2006-11-28 | 2012-04-04 | 日立オートモティブシステムズ株式会社 | 衝突回避支援システム及びそれを搭載した車両 |
| US8482486B2 (en) * | 2009-04-02 | 2013-07-09 | GM Global Technology Operations LLC | Rear view mirror on full-windshield head-up display |
| FR2947657B1 (fr) * | 2009-07-06 | 2016-05-27 | Valeo Vision | Procede de detection d'un obstacle pour vehicule automobile |
| JP5556508B2 (ja) * | 2010-08-30 | 2014-07-23 | 株式会社デンソー | 物体検出装置 |
| DE102011077333A1 (de) * | 2011-06-10 | 2012-12-27 | Robert Bosch Gmbh | Fahrerassistenzsystem mit Objektdetektion |
| US9128185B2 (en) * | 2012-03-15 | 2015-09-08 | GM Global Technology Operations LLC | Methods and apparatus of fusing radar/camera object data and LiDAR scan points |
| WO2014038076A1 (ja) * | 2012-09-07 | 2014-03-13 | トヨタ自動車株式会社 | 車間距離制御装置 |
| JP5910434B2 (ja) * | 2012-09-25 | 2016-04-27 | トヨタ自動車株式会社 | 衝突予測装置 |
| JP5642761B2 (ja) * | 2012-12-14 | 2014-12-17 | ダイハツ工業株式会社 | 運転支援装置 |
| JP5842863B2 (ja) * | 2013-05-14 | 2016-01-13 | 株式会社デンソー | 衝突緩和装置 |
| US20150102955A1 (en) * | 2013-10-14 | 2015-04-16 | GM Global Technology Operations LLC | Measurement association in vehicles |
-
2016
- 2016-06-03 JP JP2016112096A patent/JP6539228B2/ja active Active
- 2016-06-16 DE DE112016002750.8T patent/DE112016002750T5/de active Granted
- 2016-06-16 US US15/736,661 patent/US10573180B2/en active Active
- 2016-06-16 CN CN201680035181.9A patent/CN107848530B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE112016002750T5 (de) | 2018-03-29 |
| CN107848530B (zh) | 2020-12-01 |
| CN107848530A (zh) | 2018-03-27 |
| US10573180B2 (en) | 2020-02-25 |
| US20180174461A1 (en) | 2018-06-21 |
| JP2017010539A (ja) | 2017-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6539228B2 (ja) | 車両制御装置、及び車両制御方法 | |
| JP6690517B2 (ja) | 運転支援装置、及び運転支援方法 | |
| CN107430822B (zh) | 物体检测装置以及物体检测方法 | |
| WO2016204213A1 (ja) | 車両制御装置、及び車両制御方法 | |
| WO2017104773A1 (ja) | 移動体制御装置及び移動体制御方法 | |
| WO2016159288A1 (ja) | 物標存在判定方法及び装置 | |
| JP6361592B2 (ja) | 車両制御装置 | |
| CN109591685B (zh) | 用于车辆的识别支持装置 | |
| JP6855776B2 (ja) | 物体検出装置、及び物体検出方法 | |
| JP6512164B2 (ja) | 物体検出装置、物体検出方法 | |
| JP6451623B2 (ja) | 走行支援装置 | |
| JP2016011030A (ja) | 車両の運転支援装置 | |
| JP2018097687A (ja) | 車両制御装置、車両制御方法 | |
| JP6669090B2 (ja) | 車両制御装置 | |
| WO2017110871A1 (ja) | 車両制御装置及び車両制御方法 | |
| WO2018070335A1 (ja) | 移動検出装置、移動検出方法 | |
| CN110461652B (zh) | 车辆的驾驶辅助装置以及驾驶辅助方法 | |
| JP2019046143A (ja) | 走行支援装置 | |
| JP2018142297A (ja) | 情報処理装置およびプログラム | |
| CN113544031A (zh) | 驾驶辅助装置 | |
| JP6733616B2 (ja) | 車両制御装置 | |
| JP6693380B2 (ja) | 車両制御装置 | |
| WO2018070380A1 (ja) | 車両制御装置 | |
| US20220366702A1 (en) | Object detection device | |
| JP2023141982A (ja) | 周辺監視装置及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170921 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170921 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190607 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6539228 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |