JP6537458B2 - エレベータ制御装置、エレベータ監視システム、及びエレベータ制御方法 - Google Patents
エレベータ制御装置、エレベータ監視システム、及びエレベータ制御方法 Download PDFInfo
- Publication number
- JP6537458B2 JP6537458B2 JP2016010674A JP2016010674A JP6537458B2 JP 6537458 B2 JP6537458 B2 JP 6537458B2 JP 2016010674 A JP2016010674 A JP 2016010674A JP 2016010674 A JP2016010674 A JP 2016010674A JP 6537458 B2 JP6537458 B2 JP 6537458B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- torque
- brake
- brake device
- braking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Description
例えば、制動能力が大き過ぎると、非常停止時の減速度が過大となり、乗り心地が悪くなる恐れがある。このため、制動能力は、非常停止時の減速度が1G以下となるように設定される。また、制動能力が小さ過ぎると、非常停止時の減速度が小さくなり、制動距離が長くなり、例えば安全装置が動作した場合などの緊急の場合にも、かごを即座に停止させることができなくなってしまう。
図1は、本発明の実施の形態1におけるエレベータ制御装置の全体を示す構成図である。図1において、エレベータのかご1は、昇降路内に配置されている。そして、かご1は、巻上機2に備えられたシーブ3に巻き掛けられたロープ4により、他端側の釣合おもり5とともにつるべ式に吊持されている。さらに、かご1は、巻上機2に備えられたモータによって昇降駆動され、ブレーキ装置6によって制動される。ここで、釣合おもり5の重量は、例えば、かご1内に定格負荷50%が積載されたときのかご1側の重量と釣合うように設定されている。
これにより、このまま、かご1の走行に移行できるため、通常運転中での制動能力診断が可能となる。
なお、上記のステップS4及びS5は本実施の形態に不可欠のものではない。
これは、図3で示すように、時刻tsでモータが滑り出すと、モータはアンバランストルクTAと制動トルクTBの差によって回転するので、アンバランストルクTAの大きさによって、制動トルクTBの値によるモータの回転挙動が変化してしまうからである。
このテーブル例を下記の表1に示す。

そして、検出した時間tpが閾値L1とL2の範囲内の場合には、判定部12は、ブレーキ装置6の制動能力が正常であると判断し(ステップS9)、かご走行に移行する(ステップS10)。
なお、この場合の「制動能力」とは、停止している巻上機モータを回転させて行くので、特許文献1などの通常の制動方向とは逆方向であるが、その絶対値も同様に制動能力を測ることができる。
なお、本実施の形態1は、通常サービス内でブレーキ装置6の制動能力を検出することができるが、動作を通常サービス中のみに限定するものではなく、制動能力確認モードといったモードに切替えて、サービスを停止させて実施してもよいことは言うまでもない。
上記の実施の形態1では、ブレーキ装置6の開放動作時にモータのアンバランストルクTAによって、モータが停止状態から所定の角度Δθだけ回転するのに要する時間tpを用いて、ブレーキ装置6の制動能力を診断した。
これに対し、本実施の形態2では、主として、時間tpの代わりに、モータが停止状態から設定時間Δt経過後のモータ回転角θpを用いてブレーキの制動能力を診断する方法について説明する。
ブレーキコイルに電圧を印加し、ブレーキコイルに流れる電流を徐々に増加させると、電磁力FCが徐々に増大し、ブレーキ装置6による保持トルクTHが徐々に小さくなって行く。そして、或る時刻tsでアンバランストルクTAと印加したモータトルクTMとの和によるトルクが保持トルクTHと等しくなり、釣合う。さらに、この状態からブレーキコイルへの電流を大きくし、保持トルクTHがアンバランストルクTAとモータトルクTMの和を僅かでも下回ると、巻上機2のモータが回転を始める。
そこで、判定部12は、ブレーキコイルの電流を監視し、電流が逆起電力によって低下を開始した吸引開始タイミングから可動部の移動を検出する。可動部吸引完了後、ブレーキ制御部9は可動部の吸引状態を保持しておく。
これは、上述のように、実施の形態1にも適用可能である。
なお、これらのステップは、本実施の形態に不可欠のものではない。
次いで、ステップ11aにて、判定部12は、ブレーキ装置6の制動能力を診断するための閾値の補正を行う。
よって、判定部12はアンバランストルクTAとばねによる付勢力FBによって閾値L3とL4を補正する。
また、本実施の形態2では、上記の実施の形態1と同様に回転開始時点tsから設定角度Δθ回転するまでの時間tpを用いて同様の制御を行ってもよい。
上記の実施の形態2では、モータ制御部10によってアンバランストルクTAと同じ方向に規定のモータトルクTMを作用させた状態で、ブレーキ開放動作を行い、ブレーキ装置6の制動能力を診断する場合について説明した。
これに対し、本実施の形態3では、一定の診断トルクという概念を考えてブレーキの制動能力を診断する方法について説明する。
なお、本発明の実施の形態3におけるエレベータ制御装置を含むエレベータシステム全体の構成は、上記の実施の形態1及び2と同様に図1に示す例を用いることができる。
次に、ブレーキ制御部9は、ブレーキ装置6のブレーキコイルへ印加する電圧を制御し、ブレーキコイルに流れる電流を徐々に増加させる(ステップS2b)。
時刻tsにおいてモータが回転を開始すると、ブレーキ装置6からブレーキドラムへ作用するトルクが保持トルクTHから制動トルクTBに切り替わる。
回転検出器7によってモータの回転が検出されるとブレーキ制御部9は、ブレーキコイルへ流れる電流を保持するように印加する電圧を制御する(ステップS4b)。
モータ制御部10は、時間tpを計測すると同時に、モータの回転を停止させるように、モータを制御し、かご1を静止保持する(ステップS6b)。
一方、検出した時間tpが閾値L5よりも小さいときはブレーキ装置6の制動トルクTBが小さ過ぎ、閾値L6よりも大きいときはブレーキ装置6の制動トルクTBが小さ過ぎるため、判定部12は、ブレーキ装置6の制動能力が異常であると判断し(ステップS11b)、エレベータの運転を休止させ(ステップS12b)、ブレーキ装置6の制動能力が異常であることを、保守会社等の所定の場所に向けて発報する。
また、実施の形態3では、上記実施の形態1と同様に、回転開始時点tsから設定角度Δθ回転するまでの時間tpを用いて同様の制御を行ってもよいし、上記実施の形態2と同様に、設定時間Δt経過後のモータの回転角θpを用いて同様の制御を行ってもよい。
上記の実施の形態3では、一定の診断トルクTDが作用するようにモータ制御部10によってモータトルクTMを与えた状態で、ブレーキ開放動作を行い、ブレーキ装置6の制動能力を診断する場合について説明した。
これに対し、本実施の形態4では、実施の形態3とは異なり、ブレーキ電圧・電流の印加の仕方を異ならせた形で、ブレーキの制動能力を診断する方法について説明する。
なお、本発明の実施の形態4におけるエレベータ制御装置を含むエレベータシステム全体の構成は、上記の実施の形態1〜3と同様に図1に示す例を用いることができる。
一方、ステップS2cにおいて、かご1内に乗客がいない状態と判断された場合は、ブレーキ装置6の制動トルクTBの診断に移行し、ステップS3cへと進む。
時刻tsにおいてモータが回転を開始すると、ブレーキ装置6からブレーキドラムへ作用するトルクが保持トルクTHから制動トルクTBに切り替わる。
判定部12は、ステップS6cにおいて、モータが時刻tsにて回転を開始してから、事前に規定しておいた時間Δt経過後のモータの回転角θp及び回転角速度vpを、回転検出器7からの出力を監視することで測定し、これを記録する。
一方、検出した回転角θpが閾値L7〜L8の範囲外又は回転角速度vpが閾値L9〜L10の範囲外となった場合は、判定部12は、ブレーキ装置6の制動能力が異常であると判断し(ステップS11c)、エレベータの運転を休止させ(ステップS12c)、ブレーキ装置6の制動能力が異常であることを、保守会社等の所定の場所に向けて発報する。
また、モータが回転を開始してから時間Δt経過後のモータの回転角θp及び回転角速度vpの両方を用いて、ブレーキ装置6の制動能力を判定することで、制動能力判定の信頼性を向上させることができる。
上記の実施の形態4では、かご1内に乗客がいない状態で、ブレーキコイルに電流を通電し、ブレーキ装置6の制動能力を診断する場合について説明した。
これに対し、本実施の形態5では、制動トルクを演算によって求めることで、ブレーキの制動能力を診断する方法について説明する。
なお、本発明の実施の形態5におけるエレベータ制御装置を含むエレベータシステム全体の構成は、上記の実施の形態1〜4と同様に図1の例を使用することができる。
なお、このフローチャートにおいても、図3の応答波形図を一部参照することができる。
時刻tsにおいてモータが回転を開始すると、ブレーキ装置6からブレーキドラムへ作用するトルクが保持トルクTHから制動トルクTBに切り替わる。
その後、判定部12は、アンバランストルク検出器11より、巻上機2に作用しているアンバランストルクTAを計測し、これを記録する(ステップS6d)。
時刻tsにおいてモータが回転を開始してから、モータはアンバランストルクTAとブレーキの制動トルクTBの差分によって増速して行く。そのため、モータの回転挙動は下記の式(1)の運動方程式によって表すことができる。
また、FC(t)は、ブレーキ制御部9がブレーキコイルへ印加する電圧波形に対する時間tと電磁力FCの関係式であり、事前に解析などによって求めたものを判定部12に記録しておく。
閾値L11、L12は、実施の形態1において説明したものであり、かご1を安全に停止させるために必要な制動トルクTBの範囲として、予め設定しておく(L11<L12)。
また、本実施の形態5では、ブレーキコイルの電流を常に増加させるような場合に対して説明を行ったが、これに限定される訳ではなく、実施の形態3と同様にモータの回転開始を検出後にブレーキコイルの電流を保持するような制御を行ってもよい。
上記の実施の形態5では、モータの運動方程式を用いて動摩擦係数μ’を算出し、ブレーキ装置6の制動トルクTB、すなわち制動能力を診断する場合について説明した。
これに対し、本実施の形態6では、上記の式(3)とは別の方法で動摩擦係数μ’を算出することで、ブレーキの制動能力を診断する方法について説明する。
なお、本発明の実施の形態6におけるエレベータ制御装置を含むエレベータシステム全体の構成は、上記の実施の形態1〜5と同様に図1に示す構成を使用することができる。
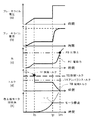
ここで、図11は、本実施の形態6におけるブレーキコイルへ電圧を印加した時の電圧、電流、力、トルク、及びモータ回転角加速度のそれぞれの応答波形の関係を示す図である。すなわち、図において、横軸は時間を示し、(a)は、ブレーキコイルに印加される電圧の波形、(b)は、電圧が印加されたときのブレーキコイルの電流iの波形、(c)は、ばね付勢力FB及びブレーキコイルの電流iによる電磁力FCの波形、(d)は、保持トルクTH及び電磁力FCによるブレーキの制動トルクTBの波形、(e)は、巻上機2のモータの回転角加速度の波形を、それぞれ示している。
回転検出器7によってモータの回転が検出されるとブレーキ制御部9は、図11(a)及び(b)に示すように、ブレーキコイルへ流れる電流を一定期間保持するように印加する電圧を一定期間、一定値に制御する(ステップS3e)。
ブレーキ制御部9は、判定部12がモータトルクTMpを記録すると、同図(a)〜(c)に示すように保持していたブレーキコイルの電流を増加させ、可動部を吸引させるとともに、可動部の吸引状態を保持する(ステップS6e)。
その後、判定部12は、アンバランストルク検出器11の情報を基に、アンバランストルクTAを計測し、これを記録する(ステップS7e)。
ステップS4eにおいて、モータトルクTMによってモータを増速させて行くときの運動方程式は下記の式(5)によって表される。
これによって、モータトルクTMpによって、回転角加速度apが与えられたときを考えると下記の式(6)が成り立つ。
この閾値L13、L14は、かご1を安全に停止させるために必要な動摩擦係数μ’の範囲として、予め設定しておく(L13<L14)。
そして、算出した動摩擦係数μ’が閾値L13〜L14の範囲内にある場合は、判定部12は、ブレーキ装置6の制動能力は正常であると判断し(ステップS9d)、かご走行を継続する(ステップS10d)。
なお、本実施の形態6では、動摩擦係数μ’を算出してブレーキ装置6の制動能力を判定したが、上記の実施の形態5と同様に動摩擦係数μ’とばねによる付勢力FBから制動トルクTBを算出して制動能力を判定してもよい。
上記の実施の形態5では、判定部12によって制動トルクTBを検出し、検出した制動トルクTBを閾値L11およびL12と比較し、ブレーキ装置6の制動能力が正常かどうか判定した。
これに対し、本実施の形態7では、検出した制動トルクTBそのものを出力する場合について説明する。
判定部12はステップS3fにおいて、回転検出器7からの出力を監視することにより、モータが回転を開始してから事前に規定した所定の、つまり設定回転角Δθだけ回転した時刻でのモータの回転角加速度apを測定し、これを記録する。モータの回転角加速度apは、回転検出器7によって検出されるモータの回転角を2階微分することで求まる。
Claims (16)
- エレベータの昇降路に配置されたかご及び釣合おもりと、前記かご及び釣合おもりの昇降を駆動する巻上機と、付勢力によってブレーキドラムに可動部を押圧することで摩擦力を発生させ前記巻上機のモータを制動させるブレーキ装置と、前記モータの回転数を検出する回転検出器と、前記ブレーキ装置の制動能力を判定する状態監視部とを備えたエレベータ制御装置であって、
前記状態監視部は、
前記付勢力を制御することで、前記ブレーキ装置の摩擦力を制御するブレーキ制御部と、
前記ブレーキ制御部を介して、前記かごが前記ブレーキ装置によって静止保持されている状態から、前記ブレーキ装置による摩擦力を徐々に解放させるとき、前記回転検出器の出力に基づき前記モータが前記かごと前記釣合おもりとのアンバランストルクにより回転開始した第一の設定タイミングを検出するとともに、前記第一の設定タイミングを検出した後、前記モータが設定した状態量になる第二の設定タイミングを検出し、前記第一の設定タイミングを検出した時から前記第二の設定タイミングに達した時までの時間を判定閾値と比較することにより前記ブレーキ装置の制動能力を判定する判定部とを備えた
エレベータ制御装置。 - エレベータの昇降路に配置されたかご及び釣合おもりと、前記かご及び釣合おもりの昇降を駆動する巻上機と、付勢力によってブレーキドラムに可動部を押圧することで摩擦力を発生させ前記巻上機のモータを制動させるブレーキ装置と、前記モータの回転数を検出する回転検出器と、前記ブレーキ装置の制動能力を判定する状態監視部とを備えたエレベータ制御装置であって、
前記状態監視部は、
前記付勢力を制御することで、前記ブレーキ装置の摩擦力を制御するブレーキ制御部と、
前記ブレーキ制御部を介して、前記かごが前記ブレーキ装置によって静止保持されている状態から、前記ブレーキ装置による摩擦力を徐々に解放させるとき、前記回転検出器の出力に基づき前記モータが前記かごと前記釣合おもりとのアンバランストルクにより回転開始した第一の設定タイミングを検出するとともに、前記第一の設定タイミングを検出してから事前に規定された設定時間経過時の第二の設定タイミングを検出し、前記第一の設定タイミングを検出した時から前記第二の設定タイミングに達した時までの間の前記モータの状態量の変化量を判定閾値と比較することにより前記ブレーキ装置の制動能力を判定する判定部とを備えた
エレベータ制御装置。 - 前記判定部は、前記検出されたアンバランストルク及び前記ブレーキ装置のばねの付勢力の内の少なくとも一方に応じて前記制動能力の判定閾値を補正する
請求項1又は2に記載のエレベータ制御装置。 - 前記状態監視部は、前記モータへ印加するモータトルクを制御するモータ制御部をさらに含み、前記判定部は、前記静止保持されている状態において、前記モータ制御部を介して、前記検出されたアンバランストルクが作用している方向に予め設定したモータトルクを印加する
請求項1又は2に記載のエレベータ制御装置。 - 前記判定部は、前記モータ制御部を介して、検出されたアンバランストルクとモータトルクとの和が事前に設定した一定の診断トルクになるように前記モータを制御する
請求項4に記載のエレベータ制御装置。 - 前記判定部は、前記ブレーキ制御部を介して、前記第一の設定タイミングを検出してから一定期間前記付勢力が一定に維持されるように制御する
請求項1又は2に記載のエレベータ制御装置。 - 前記判定部は、前記モータへ印加するモータトルクを制御するモータ制御部を介して、前記第二の設定タイミングに達した後、前記モータの回転を停止保持するようにモータトルクを制御する
請求項1又は2に記載のエレベータ制御装置。 - 前記判定部は、前記第二の設定タイミングに達した後、前記ブレーキ制御部を介して、前記ブレーキ装置が前記巻上機から吸引される前に、前記ブレーキ装置の摩擦力を徐々に増加させて前記モータを停止させる
請求項1又は2に記載のエレベータ制御装置。 - エレベータの昇降路に配置されたかご及び釣合おもりと、前記かご及び釣合おもりの昇降を駆動する巻上機と、付勢力によってブレーキドラムに可動部を押圧することで摩擦力を発生させ前記巻上機のモータを制動させるブレーキ装置と、前記モータの回転数及び回転角を検出する回転検出器と、前記ブレーキ装置の制動能力を判定する状態監視部とを備えたエレベータ制御装置であって、
前記状態監視部は、
前記付勢力を制御することで、前記ブレーキ装置の摩擦力を制御するブレーキ制御部と、
前記ブレーキ制御部を介して、前記かごが前記ブレーキ装置によって静止保持されている状態から、前記ブレーキ装置による摩擦力を徐々に解放させるとき、前記回転検出器の出力に基づき前記モータが、前記かごと前記釣合おもりとのアンバランストルクにより回転開始した第一の設定タイミングを検出するとともに、前記第一の設定タイミングを検出した後、前記モータが所定の状態量になる第二の設定タイミングを検出し、前記第二の設定タイミングに達した時点の前記モータの状態量と前記ブレーキ装置の付勢力と検出されたアンバランストルクとに基づき、前記モータにおける前記アンバランストルクと前記ブレーキ装置の制動能力と前記モータの状態量との関係式から前記ブレーキ装置の制動能力を算出する判定部とを備えた
エレベータ制御装置。 - 前記判定部は、前記第一の設定タイミングを検出した後、前記モータへ印加するモータトルクを制御するモータ制御部を介して、前記モータを設定回転角加速度まで増速させるように前記モータトルクの制御を行い、回転角速度である前記第二の設定タイミングに達した時点の前記モータトルク及び前記ブレーキ装置の付勢力と、前記検出されたアンバランストルクとに基づき、前記モータにおける前記アンバランストルクと前記ブレーキ装置の制動能力と前記モータの状態量との関係式から制動能力を算出する
請求項9に記載のエレベータ制御装置。 - 前記判定部は、算出した前記制動能力を判定閾値と比較することにより前記ブレーキ装置の制動能力を判定する
請求項9に記載のエレベータ制御装置。 - 前記判定部は、判定結果を所定の場所に送信する
請求項1、2、又は9に記載のエレベータ制御装置。 - 請求項12に記載のエレベータ制御装置と、前記エレベータ制御装置から送信された前記判定結果を受信する判定結果監視装置とを備えた
エレベータ監視システム。 - エレベータの昇降路内に配置されたかごを、ブレーキ装置によって静止保持されている状態から、前記ブレーキ装置による摩擦力を徐々に解放させることにより、巻上機のモータが、前記かごと釣合おもりとのアンバランストルクにより回転開始した第一の設定タイミングを検出し、
前記第一の設定タイミングから、前記モータが所定の状態量になる第二の設定タイミングに達するまでの時間を検出し、
前記時間を判定閾値と比較することにより前記ブレーキ装置の制動能力を判定する
エレベータ制御方法。 - エレベータの昇降路内に配置されたかごを、ブレーキ装置によって静止保持されている状態から、前記ブレーキ装置による摩擦力を徐々に解放させることにより、巻上機のモータが、前記かごと釣合おもりとのアンバランストルクにより回転開始した第一の設定タイミングを検出し、
前記第一の設定タイミングから、事前に規定された設定時間経過後の第二の設定タイミングに達するまでの間の前記モータの状態量の変化量を検出し、
前記状態量の変化量を判定閾値と比較することにより前記ブレーキ装置の制動能力を判定する
エレベータ制御方法。 - エレベータの昇降路内に配置されたかごを、ブレーキ装置によって静止保持されている状態から、前記ブレーキ装置による摩擦力を徐々に解放させることにより、巻上機のモータが、前記かごと釣合おもりとのアンバランストルクにより回転開始した第一の設定タイミングを検出し、
前記第一の設定タイミングを検出した後、前記モータが所定の状態量になる第二の設定タイミングを検出し、
前記第二の設定タイミングに達した時点の前記モータの状態量と前記ブレーキ装置の付勢力と検出されたアンバランストルクとに基づき、前記モータにおける前記アンバランストルクと前記ブレーキ装置の制動能力と前記モータの状態量との関係式から前記ブレーキ装置の制動能力を算出する
エレベータ制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016104408.3A DE102016104408B4 (de) | 2015-03-26 | 2016-03-10 | Fahrstuhlsteuerung, fahrstuhlüberwachungssystem und fahrstuhl-steuerungsverfahren |
| CN201610177807.1A CN106006262B (zh) | 2015-03-26 | 2016-03-25 | 电梯控制装置、电梯监视系统及电梯控制方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015064270 | 2015-03-26 | ||
| JP2015064270 | 2015-03-26 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016183048A JP2016183048A (ja) | 2016-10-20 |
| JP6537458B2 true JP6537458B2 (ja) | 2019-07-03 |
Family
ID=57241462
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016010674A Active JP6537458B2 (ja) | 2015-03-26 | 2016-01-22 | エレベータ制御装置、エレベータ監視システム、及びエレベータ制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6537458B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110740958B (zh) * | 2017-06-21 | 2021-11-16 | 三菱电机株式会社 | 电梯控制装置及电梯控制方法 |
| CN113614014B (zh) * | 2019-03-29 | 2023-08-29 | 三菱电机株式会社 | 电梯控制装置 |
| US11198586B2 (en) | 2019-07-03 | 2021-12-14 | Otis Elevator Company | Braking deceleration measurement of an elevator system |
| JP6781306B1 (ja) * | 2019-07-11 | 2020-11-04 | 東芝エレベータ株式会社 | 巻上機のブレーキトルク調整方法 |
| CN113176500A (zh) * | 2021-05-26 | 2021-07-27 | 深圳众城卓越科技有限公司 | 电机抱闸在线诊断分析装置及其工作方法 |
| WO2024150264A1 (ja) * | 2023-01-10 | 2024-07-18 | 株式会社日立製作所 | ブレーキ制動力測定制御装置及びブレーキ制動力測定方法 |
| JP7655652B2 (ja) | 2023-07-04 | 2025-04-02 | 東芝エレベータ株式会社 | 巻上機ブレーキの動トルク診断装置および動トルク診断方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008133096A (ja) * | 2006-11-28 | 2008-06-12 | Toshiba Elevator Co Ltd | エレベータ |
| WO2011101978A1 (ja) * | 2010-02-19 | 2011-08-25 | 三菱電機株式会社 | エレベーター装置 |
-
2016
- 2016-01-22 JP JP2016010674A patent/JP6537458B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016183048A (ja) | 2016-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6537458B2 (ja) | エレベータ制御装置、エレベータ監視システム、及びエレベータ制御方法 | |
| CN106006262B (zh) | 电梯控制装置、电梯监视系统及电梯控制方法 | |
| JP6029777B2 (ja) | エレベータ制御装置、エレベータシステム、およびエレベータ制御方法 | |
| EP2537790A1 (en) | Elevator device | |
| US20100154527A1 (en) | Elevator Brake Condition Testing | |
| CN107531453B (zh) | 电梯制动器的制动力校验 | |
| EP2636626A1 (en) | Elevator device | |
| JP2011042480A (ja) | エレベータ装置 | |
| JP2012144345A (ja) | エレベータブレーキトルク診断方法 | |
| JP5079351B2 (ja) | エレベータ装置 | |
| JP5383375B2 (ja) | エレベータ装置 | |
| US20170355560A1 (en) | System and method for monitoring elevator brake capability | |
| JP6573729B2 (ja) | エレベータ制御装置及びエレベータ制御方法 | |
| US20230007842A1 (en) | Method for testing a brake of a hoisting machine and system | |
| JP5098376B2 (ja) | エレベーターの制御装置 | |
| JP7188590B2 (ja) | エレベーター装置 | |
| JP6449806B2 (ja) | エレベータ装置及びその動作制御方法 | |
| JP7655652B2 (ja) | 巻上機ブレーキの動トルク診断装置および動トルク診断方法 | |
| JPH0930750A (ja) | エレベーターのブレーキ特性評価装置 | |
| JP7155342B1 (ja) | エレベータ制御装置およびエレベータ制御方法 | |
| JP2014101210A (ja) | エレベータの制御装置 | |
| JP2013023367A (ja) | エレベータ装置 | |
| KR20170011241A (ko) | 엘리베이터 이중브레이크의 제동력 검증 방법 | |
| JP2021116148A (ja) | ロープ式エレベータの摩耗検査システム、および、摩耗検査方法 | |
| WO2018235216A1 (ja) | 電磁ブレーキ試験方法、および、エレベータ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190604 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6537458 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |