JP6532531B2 - 医療用マニピュレータ制御装置 - Google Patents
医療用マニピュレータ制御装置 Download PDFInfo
- Publication number
- JP6532531B2 JP6532531B2 JP2017522795A JP2017522795A JP6532531B2 JP 6532531 B2 JP6532531 B2 JP 6532531B2 JP 2017522795 A JP2017522795 A JP 2017522795A JP 2017522795 A JP2017522795 A JP 2017522795A JP 6532531 B2 JP6532531 B2 JP 6532531B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- load
- joint
- command signal
- medical manipulator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
Description
エンドエフェクタが組織を把持したり組織に当たったりして関節部に負荷がかかると、ワイヤにかかる張力によってワイヤが伸びるため、駆動部においては指令信号通りに駆動されていても、先端の関節部は移動できず、目標位置と実際の位置とが異なってしまい、正確な位置に移動させることができない。
このようにすることで、負荷の変動に合わせて、無負荷の目標移動量に近づくように関節部を駆動することができる。
関節部に負荷が作用している場合に、補正部は、駆動部に無負荷の場合よりも大きな指令信号を出力させているので、そのままの指令信号では、関節部に作用する負荷が減少したときには、移動させ過ぎになる。本態様によれば、負荷が減少したときには指令信号を減少させて関節部の移動させ過ぎを防止することができる。
把持部を閉じて対象物を把持している状態から把持部を開いて対象物を解放すると、関節部にかかる負荷が急激に変化する。本態様によれば、把持部の開閉情報によって負荷の変化を早期に検出し、指令信号を迅速に補正することができる。
このようにすることで、推定された負荷自体の変化を検出して指令信号を補正するよりも迅速に負荷の時間変化、例えば、微分あるいは2回微分によって負荷の変化を予測することができる。
本実施形態に係る医療用マニピュレータ制御装置1は、図1に示されるように、操作部(図示略)からの操作指令に応じて医療用マニピュレータ2を制御する装置である。
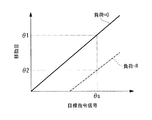
操作部は、操作者により操作される図示しないレバーを有し、レバーの傾斜角度に比例した目標指令信号θsを出力するようになっている。
負荷推定部11は、具体的には、記憶部10に記憶されている、式(1)で示される数式モデルf1を用いて負荷Rを推定するようになっている。
T=f1(θs,R) (1)
移動量推定部12は、具体的には、記憶部10に記憶されている、式(2)で示される数式モデルf2を用いて実際の移動量θを推定するようになっている。
θ=f2(θs,R) (2)
エンドエフェクタ3によって対象物が把持された状態で屈曲関節4を駆動する場合には、把持していない無負荷の場合と比較して負荷Rが作用する。
負荷変動を早期に検出する方法としては、負荷推定部11により推定される負荷Rの時間変化を検出することが挙げられる。すなわち、負荷Rの変動速度あるいは負荷Rの変動加速度を検出することにより、負荷変動を予測して早期に対応することができる。
2 医療用マニピュレータ
3 エンドエフェクタ
4 屈曲関節(関節部)
5 ワイヤ(張力伝達部材)
6 モータ(駆動部)
8 把持部
10 記憶部
11 負荷推定部
12 移動量推定部
13 補正部
θ 移動量
θs 目標指令信号
f1,f2 数式モデル
R 負荷
T 張力
Claims (5)
- エンドエフェクタを移動させる関節部と、張力伝達部材を介して前記関節部を駆動する駆動部とを備える医療用マニピュレータの数式モデルを記憶する記憶部と、
該記憶部に記憶された数式モデルと、前記駆動部に入力された目標指令信号と、該目標指令信号によって前記駆動部が駆動されたときに、前記張力伝達部材にかかる張力とに基づいて、前記関節部に作用する負荷を推定する負荷推定部と、
該負荷推定部により推定された負荷と、前記駆動部の駆動量とに基づいて、前記関節部の実際の移動量を推定する移動量推定部と、
該移動量推定部により推定された前記関節部の実際の移動量と、無負荷の場合の前記関節部の目標移動量とに基づいて、前記駆動部に対して出力する指令信号を補正する補正部とを備える医療用マニピュレータ制御装置。 - 前記補正部は、前記負荷推定部により推定された負荷が変化した場合に、前記指令信号を補正する請求項1に記載の医療用マニピュレータ制御装置。
- 前記補正部は、前記関節部に作用する負荷が減少したときに、前記指令信号を減少させるように補正する請求項2に記載の医療用マニピュレータ制御装置。
- 前記エンドエフェクタが開閉可能な把持部を備え、該把持部の開閉情報が入力され、
前記補正部が、入力された前記開閉情報に基づいて前記指令信号を補正する請求項3に記載の医療用マニピュレータ制御装置。 - 前記補正部は、前記負荷推定部により推定された負荷の時間変化から負荷の変化を検出する請求項2または請求項3に記載の医療用マニピュレータ制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/066637 WO2016199228A1 (ja) | 2015-06-09 | 2015-06-09 | 医療用マニピュレータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016199228A1 JPWO2016199228A1 (ja) | 2018-03-29 |
| JP6532531B2 true JP6532531B2 (ja) | 2019-06-19 |
Family
ID=57503512
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017522795A Active JP6532531B2 (ja) | 2015-06-09 | 2015-06-09 | 医療用マニピュレータ制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6532531B2 (ja) |
| WO (1) | WO2016199228A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020121353A (ja) * | 2019-01-29 | 2020-08-13 | 新東工業株式会社 | ロボット |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5028219B2 (ja) * | 2007-10-30 | 2012-09-19 | オリンパスメディカルシステムズ株式会社 | マニピュレータ装置および医療機器システム |
| JP4580973B2 (ja) * | 2007-11-29 | 2010-11-17 | オリンパスメディカルシステムズ株式会社 | 処置具システム |
| JP2010035768A (ja) * | 2008-08-04 | 2010-02-18 | Olympus Medical Systems Corp | 能動駆動式医療機器 |
| JP4781492B2 (ja) * | 2009-11-10 | 2011-09-28 | オリンパスメディカルシステムズ株式会社 | 多関節マニピュレータ装置及びそれを有する内視鏡システム |
-
2015
- 2015-06-09 JP JP2017522795A patent/JP6532531B2/ja active Active
- 2015-06-09 WO PCT/JP2015/066637 patent/WO2016199228A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016199228A1 (ja) | 2016-12-15 |
| JPWO2016199228A1 (ja) | 2018-03-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6660102B2 (ja) | ロボット教示装置およびその制御方法、ロボットシステム、プログラム | |
| JP6510631B2 (ja) | 軟性マニピュレータ制御装置および医療用マニピュレータシステム | |
| US10863883B2 (en) | Medical system and treatment tool calibrating method | |
| US10155316B2 (en) | Manipulator-calibrating method, manipulator, and manipulator system | |
| JP4319232B2 (ja) | パワーアシスト装置およびその制御方法 | |
| WO2011161765A1 (ja) | ロボット制御装置 | |
| JP2010089257A (ja) | 産業用ロボットのティーチングのための方法及びそれに対応して装備された産業用ロボット | |
| WO2012077335A1 (ja) | ロボットの制御装置及び制御方法、ロボット、並びに、制御プログラム | |
| JP2010069587A5 (ja) | ロボットシステムおよびロボットの制御方法 | |
| JP2010076012A (ja) | マニピュレータシステムおよびその制御方法 | |
| US11540699B2 (en) | Medical manipulator system | |
| KR20130135367A (ko) | 산업용 로봇 및 산업용 로봇을 제어하는 방법 | |
| JP7225563B2 (ja) | ロボット、制御装置およびロボットの制御方法 | |
| JP2010142909A5 (ja) | ||
| WO2021141039A1 (ja) | ワーク搬送システム | |
| JP6532531B2 (ja) | 医療用マニピュレータ制御装置 | |
| JP6714734B2 (ja) | 医療用マニピュレータおよびその作動方法 | |
| WO2017098989A1 (ja) | 外力追従制御システム | |
| US20180049831A1 (en) | Medical manipulator system | |
| CN111936078B (zh) | 臂装置、控制方法以及程序 | |
| WO2023180699A1 (en) | Grip force control in a surgical robotic system | |
| JP4618433B2 (ja) | マニピュレータの柔軟制御装置および柔軟制御方法 | |
| JP5492168B2 (ja) | 把持機構 | |
| JP2024511833A (ja) | グリッパを制御する方法 | |
| CN113631330A (zh) | 示教用于机器人夹持器中的物品的保持力 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180516 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190521 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6532531 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |