JP6514188B2 - 電気手術システム - Google Patents
電気手術システム Download PDFInfo
- Publication number
- JP6514188B2 JP6514188B2 JP2016505889A JP2016505889A JP6514188B2 JP 6514188 B2 JP6514188 B2 JP 6514188B2 JP 2016505889 A JP2016505889 A JP 2016505889A JP 2016505889 A JP2016505889 A JP 2016505889A JP 6514188 B2 JP6514188 B2 JP 6514188B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- parameter
- period
- identification
- electrosurgical system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001356 surgical procedure Methods 0.000 title claims description 6
- 239000003990 capacitor Substances 0.000 claims description 28
- 238000001514 detection method Methods 0.000 claims description 24
- 238000000034 method Methods 0.000 claims description 13
- 230000010354 integration Effects 0.000 claims description 9
- 230000010355 oscillation Effects 0.000 description 12
- 239000004020 conductor Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 239000000523 sample Substances 0.000 description 4
- 238000001035 drying Methods 0.000 description 3
- 238000001704 evaporation Methods 0.000 description 3
- 230000008020 evaporation Effects 0.000 description 3
- 230000005284 excitation Effects 0.000 description 3
- 238000010348 incorporation Methods 0.000 description 3
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 238000002955 isolation Methods 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000002674 endoscopic surgery Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 238000004659 sterilization and disinfection Methods 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1402—Probes for open surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B18/1233—Generators therefor with circuits for assuring patient safety
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1477—Needle-like probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00601—Cutting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/0091—Handpieces of the surgical instrument or device
- A61B2018/00916—Handpieces of the surgical instrument or device with means for switching or controlling the main function of the instrument or device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/0091—Handpieces of the surgical instrument or device
- A61B2018/00916—Handpieces of the surgical instrument or device with means for switching or controlling the main function of the instrument or device
- A61B2018/00928—Handpieces of the surgical instrument or device with means for switching or controlling the main function of the instrument or device by sending a signal to an external energy source
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/0091—Handpieces of the surgical instrument or device
- A61B2018/00916—Handpieces of the surgical instrument or device with means for switching or controlling the main function of the instrument or device
- A61B2018/0094—Types of switches or controllers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00982—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combined with or comprising means for visual or photographic inspections inside the body, e.g. endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00988—Means for storing information, e.g. calibration constants, or for preventing excessive use, e.g. usage, service life counter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B2018/128—Generators therefor generating two or more frequencies
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1495—Electrodes being detachable from a support structure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Otolaryngology (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Electromagnetism (AREA)
- Surgical Instruments (AREA)
Description
a)電源、
b)無線周波出力を発生させるRF発振回路、及び
c)RF出力を前記電極アセンブリに供給するように構成されている出力部、
を備え、
前記第2のユニットが、第1の期間について第1の有限の非ゼロ値を持つパラメータと、第2の期間について第2の有限の値を持つパラメータとを前記第1のユニットに交互に提供する識別回路を備え、前記第1のユニットが、前記識別回路の特性を検出して出力信号を提供するように構成されている検知回路を含み、前記第1のユニットが、前記検知回路に接続され、前記出力信号を受信するコントローラを更に含み、前記コントローラが前記検知回路からの前記出力信号に応じて前記RF出力を前記特定の電極アセンブリに適するように調節するよう構成されている;電気手術システムが提供される。

本発明の第1の局面に係る電気手術システムは、
少なくとも、第1のユニットと第2のユニットとを備え、前記第2のユニットは前記第1のユニットに取り外し可能に接続可能であり、電極アセンブリに連結されており、
前記第1のユニットは、
a)電源、
b)無線周波出力を発生させるRF発振回路、及び
c)RF出力を前記電極アセンブリに供給するように構成されている出力部、
を備え、
前記第2のユニットが、第1の期間について第1の有限の非ゼロ値を持つパラメータと、第2の期間について第2の有限の値を持つパラメータとを前記第1のユニットに交互に提供する識別回路を備え、
前記第1のユニットが、前記識別回路の特性を検出して出力信号を提供するように構成されている検知回路を含み、前記第1のユニットが、前記検知回路に接続され、前記出力信号を受信するコントローラを更に含み、前記コントローラが前記検知回路からの前記出力信号に応じて前記RF出力を前記電極アセンブリに適するように調節するよう構成されている。
また、本発明の第2の局面に係る電気手術システムは、第1の局面において、
前記第1のユニットが、前記第1の期間と前記第2の期間との交番の頻度を検出するように構成されている。
また、本発明の第3の局面に係る電気手術システムは、第1の局面において、
前記第1のユニットが、前記第1の期間と前記第2の期間との比率を検出するように構成されている。
また、本発明の第4の局面に係る電気手術システムは、第1の局面において、
前記第1のユニットが、前記第1の期間の前記パラメータの値を検出するように構成されている。
また、本発明の第5の局面に係る電気手術システムは、第1の局面において、
前記第1のユニットが、前記第2の期間の前記パラメータの値を検出するように構成されている。
また、本発明の第6の局面に係る電気手術システムは、第1の局面において、
前記第1のユニットが、前記第1の期間のパラメータの値と前記第2の期間のパラメータの値との差を検出するように構成されている。
また、本発明の第7の局面に係る電気手術システムは、第1ないし第6のいずれかの局面において、
前記識別回路が、少なくとも有限の非ゼロ値のパラメータを有する第1及び第2の受動電気的識別構成部品を含み、前記第1の識別構成部品の値が前記第2の識別構成部品の値とは異なる。
また、本発明の第8の局面に係る電気手術システムは、第7の局面において、
前記識別回路が、前記第1及び第2の識別構成部品の第1及び第2の組合せを切り替えるためのスイッチング手段を更に含む。
また、本発明の第9の局面に係る電気手術システムは、第8の局面において、
前記スイッチング手段が、前記第1の識別構成部品のみの第1の組合せと前記第2の識別構成部品のみの第2の組合せ間を切り替える。
また、本発明の第10の局面に係る電気手術システムは、第8の局面において、
前記スイッチング手段が、前記第1の識別構成部品のみの第1の組合せと前記第1及び第2の識別構成部品の両方の第2の組合せとを切り替える。
また、本発明の第11の局面に係る電気手術システムは、第1ないし第10のいずれかの局面において、
前記第1及び第2の有限の値を持つ前記パラメータがリアクタンスである。
また、本発明の第12の局面に係る電気手術システムは、第8ないし第11のいずれかの局面において、
前記スイッチング手段がトランジスタを備える。
また、本発明の第13の局面に係る電気手術システムは、第7ないし第12のいずれかの局面において、
前記第1及び第2の識別構成部品がコンデンサであり、前記第1及び第2の有限の値を有する前記パラメータがキャパシタンスである。
また、本発明の第14の局面に係る電気手術システムは、第1ないし第13のいずれかの局面において、
前記第1のユニットが電気手術用発電器であり、前記第2のユニットが前記発電器に取り外し可能に接続された電気手術器具である。
また、本発明の第15の局面に係る電気手術システムは、第1ないし第14のいずれかの局面において、
前記第1のユニットがハンドヘルド式の電気手術用ハンドピースであり、前記第2のユニットが前記電気手術用ハンドピースに取り外し可能に接続された電極ユニットである。
また、本発明の第16の局面に係る電気手術器具又は電気手術器具用の電極アセンブリは、
接続インターフェース;及び、
前記接続インターフェースにおいて時間的に変化する電気的パラメータを提示するように配設された識別回路を備え、前記時間的に変化する電気的パラメータが前記電気手術器具又は電極アセンブリの少なくとも1つの特質を決定するような識別シグネチャとして機能する。
また、本発明の第17の局面に係る電気手術器具又は電気手術器具用の電極アセンブリは、第16の局面において、
前記識別回路が、
電気的構成部品の回路網と、
一以上の前記電気的構成部品の前記回路網への組込みと組込みの解除とを切り替えることによって電気的パラメータを変化させるスイッチング素子とを備える。
また、本発明の第18の局面に係る電気手術器具又は電気手術器具用の電極アセンブリは、第17の局面において、
前記電気的構成部品の前記回路網が一以上のリアクティブな構成部品を備え、前記スイッチング素子が前記一以上のリアクティブな構成部品の前記回路網への組込みと組込みの解除を切り替えると、前記回路網の共振周波数が切り替わる。
また、本発明の第19の局面に係る電気手術器具又は電気手術器具用の電極アセンブリは、第18の局面において、
前記回路網は並列に配設された少なくとも2つのリアクティブな構成部品を備え、前記スイッチング素子、好ましくはトランジスタが、前記構成部品の一つの前記回路網への組込みと組込みの解除とを周期的に切り替えるために配設されることによって前記時間的に変化する電気的パラメータが高リアクタンスと低リアクタンスとの間、又は高インピーダンスと低インピーダンスとの間で切り替わる。
また、本発明の第20の局面に係る電気手術システムを操作する方法は、
少なくとも、第1のユニットと第2のユニットとを備え、前記第2のユニットが前記第1のユニットに取り外し可能に接続可能であり、電極アセンブリに連結されており、前記第1のユニットがRF出力信号を前記第2のユニットに提供し、
第1の期間についての第1の有限の非ゼロ値を持つパラメータと、第2の期間についての第2の有限の値を持つパラメータを時間的に変化する方式で前記第2のユニットから前記第1のユニットに提供するステップと、
前記第1のユニットにおける前記パラメータを検出するステップと、前記パラメータの検出に応じて前記第1のユニットの前記RF出力信号を特定の電極アセンブリに適するように調節するステップとを備え、
前記パラメータの前記時間的に変化する性質が、前記電極アセンブリの識別を提供する。
また、本発明の第21の局面に係る電気手術システムを操作する方法は、第20の局面において、
前記提供するステップは、提供される一以上の電気的構成部品を電気的構成部品の回路網への組込みと組込みの解除とを切り替えるステップを含み、それにより提供されるパラメータの値を変化させる。
また、本発明の第22の局面に係る電気手術システムを操作する方法は、第21の局面において、
前記電気的構成部品の回路網が一以上のリアクティブな構成部品を備え、前記一以上のリアクティブな構成部品が前記回路網への組込みと組込みの解除とで切り替えられると前記回路網の共振周波数が変化する。
また、本発明の第23の局面に係る電気手術システムを操作する方法は、第22の局面において、
前記回路網が並列に配設された少なくとも2つのリアクティブな構成部品を備え、前記方法が、前記構成部品の1つを前記回路網への組込みと組込みの解除とを周期的に切り替えるステップを含みことにより、前記時間的に変化する電気的パラメータが、高リアクタンスと低リアクタンスとの間又は高インピーダンスと低インピーダンスとの間で切り替わる。
2 出力ソケット
3 器具
4 接続コード
5 スイッチユニット
5a,5b フットスイッチ
7a,7b 押しボタン
8 ディスプレイ
9 押しボタン
10 電源
11 RF発振器
12 コントローラ
13 出力部
14 ハンドピース
15 電極アセンブリ
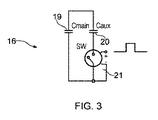
16 識別回路
17 導線
18 検知回路
19 第1のコンデンサ
20 第2のコンデンサ
21 スイッチング回路
22 一次導線
23 二次導線
24 オペアンプ(発振回路)
25 ハンドル
26 プローブ
40 スイッチ制御発振回路
42 リアクティブ出力部
50 回路
50C 出力端子
52 オペアンプ
52I 反転入力
54 絶縁変圧器
54A 一次コイル(励磁コイル)
54‘ 二次コイル
54B 検知コイル
56 緩衝アンプ
Claims (18)
- 少なくとも、第1のユニットと第2のユニットとを備え、前記第2のユニットは前記第1のユニットに取り外し可能に接続可能であり、電極アセンブリに連結されており、
前記第1のユニットは、
a)電源、
b)無線周波出力を発生させるRF発振回路、及び
c)RF出力を前記電極アセンブリに供給するように構成されている出力部、
を備え、
前記第2のユニットが、第1の期間について第1の有限の非ゼロ値を持つパラメータと、第2の期間について第2の有限の値を持つパラメータとを前記第1のユニットに交互に提供する識別回路を備え、
前記第1のユニットが、前記識別回路の特性を検出して出力信号を提供するように構成されている検知回路を含み、前記第1のユニットが、前記検知回路に接続され、前記出力信号を受信するコントローラを更に含み、前記コントローラが前記検知回路からの前記出力信号に応じて前記RF出力を前記電極アセンブリに適するように調節するよう構成されており;
前記識別回路の特性が、前記第1の期間と前記第2の期間との交番の周波数である、
電気手術システム。 - 前記第1のユニットが、前記第1の期間と前記第2の期間との比率を検出するように構成されている、
請求項1に記載の電気手術システム。 - 前記第1のユニットが、前記第1の期間の前記パラメータの値を検出するように構成されている、
請求項1に記載の電気手術システム。 - 前記第1のユニットが、前記第2の期間の前記パラメータの値を検出するように構成されている、
請求項1に記載の電気手術システム。 - 前記第1のユニットが、前記第1の期間のパラメータの値と前記第2の期間のパラメータの値との差を検出するように構成されている、
請求項1に記載の電気手術システム。 - 前記識別回路が、少なくとも有限の非ゼロ値のパラメータを有する第1及び第2の受動電気的識別構成部品を含み、前記第1の識別構成部品の値が前記第2の識別構成部品の値とは異なる、
請求項1ないし請求項5のいずれか1項に記載の電気手術システム。 - 前記識別回路が、前記第1及び第2の識別構成部品の第1及び第2の組合せを切り替えるためのスイッチング手段を更に含む、
請求項6に記載の電気手術システム。 - 前記スイッチング手段が、前記第1の識別構成部品のみの第1の組合せと前記第2の識別構成部品のみの第2の組合せ間を切り替える、
請求項6に記載の電気手術システム。 - 前記スイッチング手段が、前記第1の識別構成部品のみの第1の組合せと前記第1及び第2の識別構成部品の両方の第2の組合せとを切り替える、
請求項7に記載の電気手術システム。 - 前記スイッチング手段がトランジスタを備える、
請求項7ないし請求項9のいずれか1項に記載の電気手術システム。 - 前記第1及び第2の有限の値を持つ前記パラメータがリアクタンスである、
請求項1ないし請求項10のいずれか1項に記載の電気手術システム。 - 前記第1及び第2の識別構成部品がコンデンサであり、前記第1及び第2の有限の値を有する前記パラメータがキャパシタンスである、
請求項6ないし請求項11のいずれか1項に記載の電気手術システム。 - 前記第1のユニットが電気手術用発電器であり、前記第2のユニットが前記発電器に取り外し可能に接続された電気手術器具である、
請求項1ないし請求項12のいずれか1項に記載の電気手術システム。 - 前記第1のユニットがハンドヘルド式の電気手術用ハンドピースであり、前記第2のユニットが前記電気手術用ハンドピースに取り外し可能に接続された電極ユニットである、
請求項1ないし請求項13のいずれか1項に記載の電気手術システム。 - 少なくとも、第1のユニットと第2のユニットとを備え、前記第2のユニットが前記第1のユニットに取り外し可能に接続可能であり、電極アセンブリに連結されており、前記第1のユニットがRF出力信号を前記第2のユニットに提供し、
第1の期間についての第1の有限の非ゼロ値を持つパラメータと、第2の期間についての第2の有限の値を持つパラメータを時間的に変化する方式で前記第2のユニットから前記第1のユニットに提供するステップと、
前記第1のユニットにおける前記パラメータを検出するステップと、前記パラメータの検出に応じて前記第1のユニットの前記RF出力信号を特定の電極アセンブリに適するように調節するステップとを備え、
前記パラメータの前記時間的に変化する性質が、前記第1の期間と前記第2の期間との交番の周波数であり、前記特定の電極アセンブリの識別を提供する;
電気手術システムを操作する方法。 - 前記提供するステップは、提供される一以上の電気的構成部品を電気的構成部品の回路網への組込みと組込みの解除とを切り替えるステップを含み、それにより提供されるパラメータの値を変化させる、
請求項15に記載の電気手術システムを操作する方法。 - 前記電気的構成部品の回路網が一以上のリアクティブな構成部品を備え、前記一以上のリアクティブな構成部品が前記回路網への組込みと組込みの解除とで切り替えられると前記回路網の共振周波数が変化する、
請求項16に記載の電気手術システムを操作する方法。 - 前記回路網が並列に配設された少なくとも2つのリアクティブな構成部品を備え、前記方法が、前記構成部品の1つを前記回路網への組込みと組込みの解除とを周期的に切り替えるステップを含むことにより、前記時間的に変化する電気的パラメータが、高リアクタンスと低リアクタンスとの間又は高インピーダンスと低インピーダンスとの間で切り替わる、
請求項17に記載の電気手術システムを操作する方法。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB201305987A GB201305987D0 (en) | 2013-04-03 | 2013-04-03 | Electrosurgical system |
| GB1305987.8 | 2013-04-03 | ||
| US14/020,240 | 2013-09-06 | ||
| US14/020,240 US9066735B2 (en) | 2013-04-03 | 2013-09-06 | Electrosurgical system |
| GB1318618.4 | 2013-10-22 | ||
| GB1318618.4A GB2512683B (en) | 2013-04-03 | 2013-10-22 | Electrosurgical system |
| PCT/GB2014/051034 WO2014162132A1 (en) | 2013-04-03 | 2014-04-02 | Electrosurgical system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016514561A JP2016514561A (ja) | 2016-05-23 |
| JP2016514561A5 JP2016514561A5 (ja) | 2017-05-18 |
| JP6514188B2 true JP6514188B2 (ja) | 2019-05-15 |
Family
ID=48445177
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016505889A Active JP6514188B2 (ja) | 2013-04-03 | 2014-04-02 | 電気手術システム |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US9066735B2 (ja) |
| EP (1) | EP2981221A1 (ja) |
| JP (1) | JP6514188B2 (ja) |
| CN (1) | CN105307588B (ja) |
| AU (1) | AU2014246876B2 (ja) |
| CA (1) | CA2907701C (ja) |
| GB (1) | GB201305987D0 (ja) |
| WO (1) | WO2014162132A1 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| CN107106228B (zh) | 2014-10-31 | 2020-05-05 | 美敦力先进能量有限公司 | 用于减少rf发生器中的泄漏电流的功率监测电路与方法 |
| US11446078B2 (en) | 2015-07-20 | 2022-09-20 | Megadyne Medical Products, Inc. | Electrosurgical wave generator |
| US11058475B2 (en) | 2015-09-30 | 2021-07-13 | Cilag Gmbh International | Method and apparatus for selecting operations of a surgical instrument based on user intention |
| CN105455904B (zh) * | 2015-12-25 | 2020-03-24 | 珠海市司迈科技有限公司 | 一种医用手术电极的识别电路 |
| US10299821B2 (en) | 2016-01-15 | 2019-05-28 | Ethicon Llc | Modular battery powered handheld surgical instrument with motor control limit profile |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US10376305B2 (en) * | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US20180303542A1 (en) * | 2016-10-14 | 2018-10-25 | Eclipse Aesthetics, LLC | RF Energy Delivery Device for Vaginal Tightening |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11723716B2 (en) | 2019-12-30 | 2023-08-15 | Cilag Gmbh International | Electrosurgical instrument with variable control mechanisms |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11986201B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11786294B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Control program for modular combination energy device |
| CN112274242B (zh) * | 2020-10-22 | 2023-06-30 | 四川大学华西第四医院 | 一种便于功率调节的射频电波刀 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9526627D0 (en) * | 1995-12-29 | 1996-02-28 | Gyrus Medical Ltd | An electrosurgical instrument and an electrosurgical electrode assembly |
| BR9612395A (pt) * | 1995-12-29 | 1999-07-13 | Gyrus Medical Ltd | Instrumento eletrocirúrgico e um conjunto de eltrodo eletrocirúrgico |
| GB0221707D0 (en) * | 2002-09-18 | 2002-10-30 | Gyrus Medical Ltd | Electrical system |
| EP1695597A1 (en) * | 2003-12-11 | 2006-08-30 | Koninklijke Philips Electronics N.V. | Electronic ballast with lamp type determination |
| GB0709993D0 (en) * | 2007-05-24 | 2007-07-04 | Gyrus Medical Ltd | An electrosurgical system and an electrode assembly for an electrosurgical system |
| US20090254077A1 (en) | 2008-04-08 | 2009-10-08 | Tyco Healthcare Group Lp | Arc Generation in a Fluid Medium |
| CN202526295U (zh) * | 2011-12-29 | 2012-11-14 | 瑞奇外科器械(中国)有限公司 | 电医疗器械 |
-
2013
- 2013-04-03 GB GB201305987A patent/GB201305987D0/en not_active Ceased
- 2013-09-06 US US14/020,240 patent/US9066735B2/en active Active
-
2014
- 2014-04-02 JP JP2016505889A patent/JP6514188B2/ja active Active
- 2014-04-02 AU AU2014246876A patent/AU2014246876B2/en active Active
- 2014-04-02 CA CA2907701A patent/CA2907701C/en active Active
- 2014-04-02 CN CN201480031787.6A patent/CN105307588B/zh active Active
- 2014-04-02 EP EP14716383.6A patent/EP2981221A1/en not_active Withdrawn
- 2014-04-02 WO PCT/GB2014/051034 patent/WO2014162132A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| CA2907701C (en) | 2022-04-12 |
| AU2014246876B2 (en) | 2018-10-04 |
| CN105307588A (zh) | 2016-02-03 |
| CN105307588B (zh) | 2018-07-24 |
| EP2981221A1 (en) | 2016-02-10 |
| GB201305987D0 (en) | 2013-05-15 |
| CA2907701A1 (en) | 2014-10-09 |
| US20140303612A1 (en) | 2014-10-09 |
| US9066735B2 (en) | 2015-06-30 |
| AU2014246876A1 (en) | 2015-10-22 |
| JP2016514561A (ja) | 2016-05-23 |
| WO2014162132A1 (en) | 2014-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6514188B2 (ja) | 電気手術システム | |
| JP6483130B2 (ja) | 医療器具 | |
| JP5815694B2 (ja) | 高周波外科装置 | |
| EP3212102B1 (en) | Fingerswitch circuitry to reduce rf leakage current | |
| JP6298598B2 (ja) | 周波数応答のモニタリングからの超音波ディセクターの温度推定および組織検出 | |
| JP2017192743A (ja) | 周波数応答のモニタリングからの超音波ディセクターの温度推定および組織検出 | |
| JP2010527674A5 (ja) | ||
| JP2013255793A (ja) | 周波数応答のモニタリングからの超音波ディセクターの温度推定および組織検出 | |
| RU2464950C2 (ru) | Схема для радиочастотных устройств, применяемых для живых тканей, и устройство, содержащее эту схему | |
| JP2010221029A (ja) | 戻り電極モニタリングのためのシステムおよび方法 | |
| JP2009183708A (ja) | 戻り電極モニタリングのためのシステムおよび方法 | |
| JP4897682B2 (ja) | 外科用器具の位置を測定するための装置 | |
| US20140066818A1 (en) | Ultrasonic treatment device | |
| JP2023116459A (ja) | 外科用システムに駆動信号を供給する制御コンソール | |
| KR20190125523A (ko) | 전기 수술 기구 내의 절연 파괴 방지 시스템 및 방법 | |
| US9820805B2 (en) | Electrosurgical instrument and system | |
| US10908187B2 (en) | Current sensor with reduced voltage coupling | |
| CN107847265B (zh) | 用于对人或动物患者的身体进行组织切割的电外科装置 | |
| US11051879B2 (en) | Control device for surgical instrument, and surgical system | |
| GB2512683A (en) | Electrosurgical system | |
| JP2014007898A (ja) | 医療用無線給電システム | |
| JP2009261935A (ja) | 手術用電源供給装置及び共振周波数探査方法 | |
| JP2013512056A (ja) | 電気外科用発電機 | |
| JP2022159001A (ja) | 電気外科用器具 | |
| JP2004305628A (ja) | 電気手術装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170329 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180223 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180524 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180720 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180824 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190110 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20190226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190319 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190411 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6514188 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |