《第1の実施形態》
以下、第1の実施形態について、図1〜図12(B)に基づいて説明する。
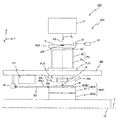
図1には、第1の実施形態に係る露光装置100の構成が概略的に示されている。この露光装置100は、ステップ・アンド・スキャン方式の投影露光装置、いわゆるスキャナである。後述するように、本実施形態では、投影光学系PLが設けられており、以下においては、この投影光学系PLの光軸AXと平行な方向をZ軸方向、これに直交する面内でレチクルとウエハとが相対走査される方向をY軸方向、Z軸及びY軸に直交する方向をX軸方向とし、X軸、Y軸、及びZ軸回りの回転(傾斜)方向をそれぞれθx、θy、及びθz方向として説明を行う。
露光装置100は、図1に示されるように、ベース盤12の+Y側端部近傍の上方に配置された露光部200と、露光部200から−Y側に所定距離離れて配置された搬入ユニット121を含む搬送システム120(図8参照)と、ベース盤12上で独立してXY平面内で2次元移動するウエハステージWSTと、これらの制御系等とを備えている。搬送システム120は、搬入ユニット121と搬出ユニット122(図8参照)とで構成される。
ベース盤12は、床F上に複数の防振装置(図示省略)によってほぼ水平に(XY平面に平行に)支持されている。ベース盤12は、平板状の外形を有する部材から成る。なお、図1において、ウエハステージWST(より詳細には後述するウエハテーブルWTB)上にウエハWが保持されている。
露光部200は、照明系10、レチクルステージRST及び投影ユニットPU等を備えている。
照明系10は、例えば米国特許出願公開第2003/0025890号明細書などに開示されるように、光源と、オプティカルインテグレータ等を含む照度均一化光学系、及びレチクルブラインド等(いずれも不図示)を有する照明光学系と、を含む。照明系10は、レチクルブラインド(マスキングシステムとも呼ばれる)で設定(制限)されたレチクルR上のスリット状の照明領域IARを、照明光(露光光)ILによりほぼ均一な照度で照明する。ここで、照明光ILとして、一例として、ArFエキシマレーザ光(波長193nm)が用いられている。
レチクルステージRST上には、そのパターン面(図1における下面)に回路パターンなどが形成されたレチクルRが、例えば真空吸着により固定されている。レチクルステージRSTは、例えばリニアモータ等を含むレチクルステージ駆動系11(図1では不図示、図8参照)によって、XY平面内で微小駆動可能であるとともに、走査方向(図1における紙面内左右方向であるY軸方向)に所定の走査速度で駆動可能となっている。
レチクルステージRSTのXY平面内の位置情報(θz方向の回転情報を含む)は、レチクルレーザ干渉計(以下、「レチクル干渉計」という)13によって、レチクルステージRSTに固定された移動鏡15(実際には、Y軸方向に直交する反射面を有するY移動鏡(あるいは、レトロリフレクタ)とX軸方向に直交する反射面を有するX移動鏡とが設けられている)を介して、例えば0.25nm程度の分解能で常時検出される。レチクル干渉計13の計測値は、主制御装置20(図1では不図示、図8参照)に送られる。
投影ユニットPUは、レチクルステージRSTの図1における下方に配置されている。投影ユニットPUは、ベース盤12の上方に水平に配置されたメインフレームBDによってその外周部に設けられたフランジ部FLGを介して支持されている。メインフレームBDは図1及び図3に示されるようにY軸方向の寸法がX軸方向の寸法より大きな平面視六角形状(矩形の2つの角を切り落としたような形状)の板部材から成り、床Fに支持された不図示の複数の支持部材によって除振装置をそれぞれ介して支持されている。
投影ユニットPUは、鏡筒40と、鏡筒40内に保持された投影光学系PLと、を含む。投影光学系PLとしては、例えば、Z軸と平行な光軸AXに沿って配列される複数の光学素子(レンズエレメント)から成る屈折光学系が用いられている。投影光学系PLは、例えば両側テレセントリックで、所定の投影倍率(例えば1/4倍、1/5倍又は1/8倍など)を有する。このため、照明系10からの照明光ILによってレチクルR上の照明領域IARが照明されると、投影光学系PLの第1面(物体面)とパターン面がほぼ一致して配置されるレチクルRを通過した照明光ILにより、投影光学系PL(投影ユニットPU)を介してその照明領域IAR内のレチクルRの回路パターンの縮小像(回路パターンの一部の縮小像)が、投影光学系PLの第2面(像面)側に配置される、表面にレジスト(感応剤)が塗布されたウエハW上の前記照明領域IARに共役な領域(以下、露光領域とも呼ぶ)IAに形成される。そして、レチクルステージRSTとウエハステージWST(より正しくは、ウエハWを保持する後述する微動ステージWFS)との同期駆動によって、照明領域IAR(照明光IL)に対してレチクルRを走査方向(Y軸方向)に相対移動させるとともに、露光領域IA(照明光IL)に対してウエハWを走査方向(Y軸方向)に相対移動させることで、ウエハW上の1つのショット領域(区画領域)の走査露光が行われ、そのショット領域にレチクルRのパターンが転写される。すなわち、本実施形態では照明系10、及び投影光学系PLによってウエハW上にレチクルRのパターンが生成され、照明光ILによるウエハW上の感応層(レジスト層)の露光によってウエハW上にそのパターンが形成される。
ウエハステージWSTは、図1からわかるように、粗動ステージWCSと、粗動ステージWCSに非接触状態で支持され、粗動ステージWCSに対して相対移動可能な微動ステージWFSとを有している。
粗動ステージWCSは、電磁力(ローレンツ力)駆動方式の平面モータ(米国特許第5,196,745号明細書参照)又はリニアモータ等から成る粗動ステージ駆動系51A(図8参照)により、X軸及びY軸方向に所定ストロークで駆動されるとともにθz方向に微小駆動される。
微動ステージWFSの内部には、図1では不図示であるが、後述するウエハテーブルWTB(及びウエハホルダ(図1では不図示、図2参照))に形成された不図示の孔に挿入され、上下動可能な複数(例えば3本)の上下動ピン140(図4(B)参照)が設けられている。3本の上下動ピン140それぞれの上面には、真空吸引用の吸引口(不図示)が形成されている。また、3本の上下動ピン140は、それぞれの下端面が台座部材141の上面に固定されている。3本の上下動ピン140は、それぞれ台座部材141の上面の平面視でほぼ正三角形の頂点の位置に配置されている。3本の上下動ピン140それぞれに形成された吸引口は、上下動ピン140(及び台座部材141)の内部に形成された管路及び不図示の真空配管を介して真空ポンプ(不図示)に連通されている。台座部材141は、下面の中央部に固定された軸143を介して駆動装置142に接続されている。すなわち、3本の上下動ピン140は、台座部材141と一体で駆動装置142によって上下方向に駆動される。本実施形態では、台座部材141と3本の上下動ピン140と軸143とによって、ウエハ下面の中央部領域の一部を下方から支持可能なウエハセンター支持部材(以下、センター支持部材と略記する)150が構成されている。ここで、3本の上下動ピン140(センター支持部材150)の基準位置からのZ軸方向の変位は、例えば駆動装置142に設けられたエンコーダシステム等の変位センサ145(図4では不図示、図8参照)によって検出されている。主制御装置20は、変位センサ145の計測値に基づいて、駆動装置142を介して3本の上下動ピン140(センター支持部材150)を上下方向に駆動する。
また、微動ステージWFSは、微動ステージ駆動系52A(図8参照)によって粗動ステージWCSに対して6自由度方向(X軸、Y軸、Z軸、θx、θy及びθzの各方向)に駆動される。微動ステージ駆動系52Aは、例えば、米国特許出願公開第2010/0073652号明細書及び米国特許出願公開第2010/0073653号明細書と同様に、不図示の磁石ユニットと不図示のコイルユニットとによって、微動ステージWFSを粗動ステージWCSに対して非接触状態で支持するとともに、非接触で6自由度方向へ駆動する。
微動ステージWFSは、本体部81と本体部81の上面に固定されたウエハテーブルWTBとを含む。ウエハテーブルWTBの上面の中央には、バキュームチャック(又は静電チャック)などを有するウエハホルダWH(図1では不図示、図2参照)を介して、ウエハWが真空吸着等によって固定されている。ウエハホルダWHはウエハテーブルWTBと一体に形成しても良いが、本実施形態ではウエハホルダWHとウエハテーブルWTBとを別々に構成し、例えば真空吸着などによってウエハホルダWHをウエハテーブルWTB上に固定している。また、ウエハテーブルWTBの上面には、図2に示されるように、+Y側の端部近傍に、計測プレート(基準マーク板とも呼ばれる)30が設けられている。この計測プレート30には、ウエハテーブルWTBのセンターラインCLと一致する中心位置に第1基準マークFMが設けられ、該第1基準マークFMを挟むように一対のレチクルアライメント用の第2基準マークRMが設けられている。
本実施形態では、微動ステージWFSが本体部81とウエハテーブルWTBとを有するものとしたが、例えば、本体部81を設けずに、前述の微動ステージ駆動系52AによってウエハテーブルWTBを駆動しても良い。また、微動ステージWFSは、その上面の一部にウエハWの載置領域を有していれば良く、ウエハステージWSTの保持部、あるいはテーブル、可動部などと呼ぶことができる。
ウエハテーブルWTB上には、ウエハホルダWHに近接して複数(例えば3つ)の反射鏡86が設けられている。3つの反射鏡86は、ウエハホルダWHの外側に近接してそれぞれ配置されている。3つの反射鏡86のうち1つは、センターラインCL上でウエハホルダWHの−Y側の位置(平面視においてウエハWの中心に対して6時の方向の位置、すなわちウエハWのノッチが対向する位置)に、残りの2つは、平面視においてウエハWの中心に対して2時、10時の方向のセンターラインCLに関して対称な位置に、それぞれ配置されている。なお、図2では、説明の便宜上からウエハホルダWHの外径がウエハWの直径よりも大きく図示されているが、実際には、ウエハホルダWHの外径は、ウエハWの直径と同じ若しくは幾分小さい。
ウエハテーブルWTBの−Y端面,−X端面には、それぞれ鏡面加工が施され、図2に示される反射面17a,反射面17bが形成されている。なお、上述の如く、本実施形態では、微動ステージWFSがウエハテーブルWTBを備えているので、以下の説明では、ウエハテーブルWTBを含む微動ステージWFSを、ウエハテーブルWTBとも表記する。
ウエハテーブルWTB(ウエハステージWST)の位置情報は、図1に示されるY干渉計16を含む干渉計システム70(図8参照)によって計測される。
干渉計システム70は、ウエハテーブルWTB(ウエハステージWST)の位置情報を計測する複数の干渉計、具体的には、図3に示される、Y干渉計16及び3つのX干渉計136、137、138等を含む。本実施形態では、上記各干渉計としては、一部を除いて、測長軸を複数有する多軸干渉計が用いられている。
Y干渉計16は、図1及び図3に示されるように、投影光学系PLの投影中心(光軸AX、本実施形態では前述の露光領域IAの中心とも一致)を通るY軸に平行な直線(以下、基準軸と呼ぶ)LVから同一距離−X側,+X側に離れたY軸方向の光路にそれぞれ沿って測長ビームB41,B42をウエハテーブルWTBの反射面17aに照射し、それぞれの反射光を受光する。また、Y干渉計16は、測長ビームB41,B42から−Z方向に離間し、かつ基準軸LV上を通るY軸方向の光路に沿って測長ビームB3を反射面17aに向けて照射し、反射面17aで反射した測長ビームB3を受光する。
X干渉計136は、投影光学系PLの光軸を通るX軸方向の直線(基準軸)LHから同一距離+Y側,−Y側に離れたX軸方向の光路にそれぞれ沿った測長ビームB51,B52、及び測長ビームB51又はB52から−Z方向に離間したX軸方向の光路に沿った測長ビームを含む3本のX軸方向の測長ビームをウエハテーブルWTBの反射面17bに照射し、それぞれの反射光を受光する。
X干渉計137は、後述するアライメント検出系ALGの検出中心を通るX軸に平行な直線LAに沿って測長ビームB6及び該測長ビームB6の−Z側の光路を通る測長ビームをウエハテーブルWTBの反射面17bに照射し、それぞれの反射光を受光する。
X干渉計138は、ウエハのロードが行われるローディングポジションLPを通るX軸に平行な直線LULに沿って測長ビームB7をウエハテーブルWTBの反射面17bに照射し、その反射光を受光する。
干渉計システム70の各干渉計の計測値(位置情報の計測結果)は、主制御装置20に供給されている(図8参照)。主制御装置20は、Y干渉計16の計測値に基づいて、ウエハテーブルWTBのY軸方向、θx方向及びθz方向に関する位置情報を求める。また、主制御装置20は、X干渉計136、137及び138のいずれかの計測値に基づいてウエハテーブルWTBのX軸方向に関する位置情報を求める。また、主制御装置20は、X干渉計136の計測値に基づいて、ウエハテーブルWTBのθy方向に関する位置情報を求める。なお、主制御装置20は、X干渉計136の計測値に基づいてウエハテーブルWTBのθz方向に関する位置情報を求めることとしても良い。
この他、干渉計システム70は、Z軸方向に離間した一対のY軸に平行な測長ビームを、粗動ステージWCSの−Y側の側面に固定された移動鏡(不図示)の上下一対の反射面をそれぞれ介して一対の固定鏡(不図示)に照射し、その一対の固定鏡からの上記反射面を介した戻り光を受光する、基準軸LVから同一距離−X側,+X側に離れて配置された一対のZ干渉計を備えていても良い。この一対のZ干渉計の計測値に基づいて、主制御装置20は、Z軸、θy、θzの各方向を含む少なくとも3自由度方向に関するウエハステージWSTの位置情報求めることができる。
なお、干渉計システム70の詳細な構成、及び計測方法の詳細の一例については、例えば米国特許出願公開第2008/0106722号明細書などに詳細に開示されている。
ウエハテーブルWTB(ウエハステージWST)の位置情報を計測するために本実施形態では干渉計システムを用いたが、別の手段を用いても良い。例えば、米国特許出願公開第2010/0297562号明細書に記載されているようなエンコーダシステムを使用することも可能である。
露光装置100では、さらに、図1に示されるように、投影ユニットPUの鏡筒40の下端部側面に、第1基準マークFM及びウエハW上のアライメントマークを検出するアライメント検出系ALGが設けられている。アライメント検出系ALGとしては、例えば、ウエハ上のレジストを感光させないブロードバンドな検出光束を対象マークに照射し、その対象マークからの反射光により受光面に結像された対象マークの像と不図示の指標(各アライメント系内に設けられた指標板上の指標パターン)の像とを撮像素子(CCD等)を用いて撮像し、それらの撮像信号を出力する画像処理方式のFIA(Field Image Alignment)系が用いられている。アライメント検出系ALGからの撮像信号は、主制御装置20に供給されるようになっている(図8参照)。
なお、アライメント検出系ALGに代えて、例えば米国特許出願公開第2009/0233234号明細書に開示されている5つのアライメント系を備えたアライメント装置を設けても良い。
この他、露光装置100では、投影光学系PLの近傍に、ウエハWの表面に複数の計測ビームを照射する照射系54aと、それぞれの反射ビームを受光する受光系54bとを有する多点焦点位置検出系(以下、多点AF系と称する)54(図8参照)が設けられている。多点AF系54の詳細構成については、例えば米国特許第5,448,332号明細書等に開示されている。
図1では不図示であるが、レチクルRの上方に、レチクルR上の一対のレチクルアライメントマークと、これに対応するウエハテーブルWTB上の計測プレート30上の一対の第2基準マークRMの投影光学系PLを介した像とを同時に観察するための露光波長の光を用いたTTR(Through The Reticle)方式の一対のレチクルアライメント検出系14(図8参照)が配置されている。この一対のレチクルアライメント検出系14の検出信号は、主制御装置20に供給されるようになっている。
次に、搬送システム120(図8参照)について説明する。搬送システム120の一部を構成する搬入ユニット121(図1参照)は、露光前のウエハを、ウエハテーブルWTB上にロードするのに先立ってローディングポジションLPの上方で保持し、ウエハテーブルWTB上にロードするためのものである。また、搬送システム120の一部を構成する搬出ユニット122(図8参照)は、露光後のウエハを、ウエハテーブルWTBからアンロードするためのものである。
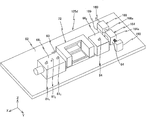
搬入ユニット121は、図3及び図4(A)に示されるように、ウエハWを上方から非接触で吸引するチャックユニット153、チャックユニット153を上下方向に駆動する複数、例えば3つのZボイスコイルモータ144、チャックユニット153の自重を支持する複数、例えば一対の重量キャンセル装置131、並びに3つのZボイスコイルモータ144及び一対の重量キャンセル装置131などが搭載されたベース部材22等を備えている。ベース部材22は、長手方向(X軸方向)両端部に接続された不図示の支持部材及び防振装置(いずれも図示せず)を介してメインフレームBD(図1参照)に吊下げ支持されている。
チャックユニット153は、図4(A)及び図4(B)に示されるように、例えば平面視(上方から見て)長手方向(X軸方向)の両端部に一対の張り出し部44a、44bが設けられた略円形の所定厚さの板部材(プレート)44、及び板部材44の下面に所定の配置で埋めこまれた複数のチャック部材124等を備えている。本実施形態に係るチャックユニット153は、さらに、板部材44に120°の間隔で形成された3つの段付き開口25内にそれぞれ収納された後述する3つのウエハ支持ユニット125をも備えている。
ここで、板部材44は、その内部に配管等が設けられ、その配管内に所定温度に温調された液体が流れることでウエハを所定温度に温調するためのクールプレートを兼ねている。ただし、板部材44は、必ずしもクールプレートを兼ねている必要はない。
前述のベース部材22は、図4(A)に示されるように、板部材44の形状に対応した形状の切欠き部22aが形成された板部材から成る。すなわち、板部材44は、ベース部材22の切欠き部22aに対して所定の隙間(ギャップ、クリアランス)を介して対向する状態で、配置されている。
板部材44には、複数のチャック部材124と干渉しない位置に複数の不図示の貫通孔が形成されている。また、板部材44には、図4(A)に示されるように、平面視において基準軸LV上に位置する中心に対して6時の方向の位置、2時の方向の位置、及び10時の方向の位置にそれぞれ段付き開口25が形成されている。それぞれの段付き開口25内には、後述するウエハ支持ユニット125の少なくとも一部が収納されている。なお、開口25(ウエハ支持ユニット125)の配置及び個数は、これに限られるものではない。
各チャック部材124としては、いわゆるベルヌーイ・チャック(ベルヌーイ・カップ)が用いられている。ベルヌーイ・チャックは、周知の如く、ベルヌーイ効果を利用し、噴き出される流体(例えば空気)の流速を局所的に大きくし、対象物を吸引(非接触で保持)するチャックである。ここで、ベルヌーイ効果とは、流体の圧力は流速が増すにつれ減少するというもので、ベルヌーイ・チャックでは、吸引(保持、固定)対象物の重さ、及びチャックから噴き出される流体の流速で吸引状態(保持/浮遊状態)が決まる。すなわち、対象物の大きさが既知の場合、チャックから噴き出される流体の流速に応じて、吸引の際のチャックと保持対象物との隙間の寸法が定まる。本実施形態では、チャック部材124は、ウエハWの周辺に気体の流れ(気体流)を発生させてウエハWを吸引するのに用いられる。吸引の力の度合いは適宜調整可能で、ウエハWを、複数のチャック部材124で吸引することで、Z軸方向,θx及びθy方向の移動を制限することができる。
複数のチャック部材124は、主制御装置20により、調整装置115(図8参照)を介して、それぞれのチャック部材124から噴き出される気体流の流速、流量及び噴き出しの向き(気体の噴出方向)等の少なくとも1つが制御されることで、各チャック部材124の吸引力が個別に任意の値に設定される。なお、複数のチャック部材124を、予め定めたグループ毎に、吸引力を設定可能に構成しても良い。なお、主制御装置20は、気体の温度を制御するようにしても良い。
ウエハWを、後述するように、チャック部材124で吸引する際にチャック部材124から噴き出された流体(例えば空気)は、板部材44に形成された不図示の貫通孔を介して外部(チャックユニット153の上方)に放出される。
ここで、チャック部材124に供給される気体(例えば圧縮空気)として、少なくとも温度が一定に調節され、塵埃、パーティクルなどが取り除かれたクリーンエアが供給される。すなわち、チャック部材124に吸引されたウエハWは、温調された圧縮空気により、所定の温度に保たれる。また、ウエハステージWST等が配置された空間の温度、清浄度等を設定範囲に保つことができる。
また、板部材44には、L字の棒状部材から成る複数、ここでは3つの支持部材241、242、243それぞれの一端が接続されている。
3つの支持部材241、242、243のそれぞれは、L字部の短い方の辺の端部である一端が、板部材44の上面に固定されている。2つの支持部材241、242それぞれの一端は、板部材44の張り出し部44a、44bの上面の所定位置、ここでは平面視において基準軸LV上に位置する板部材44の中心に対して3時、9時の方向の位置に固定されている。また、残りの支持部材243の一端は、平面視において板部材44の中心に対して6時の方向の位置(基準軸LV上に一致する位置)であって後述する段付き開口25よりも幾分+Y側の位置に固定されている。
2つの支持部材241、242それぞれの長い方の辺は、X軸方向に沿って配置され、それぞれの辺の他端部が、重量キャンセル装置131によって下方から支持されるとともに、Zボイスコイルモータ144に接続されている。この場合、重量キャンセル装置131の外側にZボイスコイルモータ144が配置されている。残りの支持部材243の長い方の辺はX軸及びY軸に対して所定角度傾斜した方向に沿って配置され、その辺の他端部の下面がZボイスコイルモータ144に接続されている。
3つのZボイスコイルモータ144のそれぞれは、チャックユニット153を上下方向(Z軸方向)に所定のストローク(チャックユニット153がウエハWの吸引を開始する第1位置と、チャックユニット153に吸引されたウエハWがウエハホルダWH(ウエハテーブルWTB)上に載置される第2位置とを含む範囲)で駆動する。ここで、3つのZボイスコイルモータ144のうち、支持部材243に接続されたZボイスコイルモータ144は、主にチャックユニット153の姿勢制御(θx方向の姿勢制御)に用いられる。3つのZボイスコイルモータ144のそれぞれは、主制御装置20によって制御される(図8参照)。
2つの重量キャンセル装置131のそれぞれは、一種の空気ばね装置であり、不図示のピストン部材と、ピストン部材がスライド自在に設けられた不図示のシリンダとを備えている。ピストン部材のピストンとシリンダとで区画されるシリンダ内部の空間の圧力は、チャックユニット153(板部材44、複数のチャック部材124及び後述する3つのウエハ支持ユニット125)、並びに支持部材241〜243の自重に応じた値に設定されている。これにより、2つの重量キャンセル装置131は、支持部材241、242に対して上向き(+Z方向)の力を与え、チャックユニット153の自重(又はその一部)が支持されている。重量キャンセル装置131のシリンダ内部に供給される気体の圧力及び量等は、主制御装置20(図8参照)によって制御されている。ここで、重量キャンセル装置131は、シリンダに沿って、上下方向に移動するピストン部材を備えているので、チャックユニット153の上下動の際のガイドを兼ねている。
3つのウエハ支持ユニット125は、上述したように、板部材44に形成された3つの段付き開口25内に個別に収納されている(図4(A)及び図4(B)参照)。図4(B)では、ウエハWを支持する後述する保持部の一部が板部材44の下面から露出した状態が示されている。
なお、3つのウエハ支持ユニット125は、配置が異なる点を除き同じ構成であるので、以下では、板部材44の中心に対して−Y方向に位置する段付き開口25内に収納されたウエハ支持ユニット125を代表的に取り上げて説明する。
ウエハ支持ユニット125は、図5(A)に示されるように、平板部材62と、平板部材62上にその長手方向に所定間隔で配置された2つの軸受部材661、662と、2つの軸受部材661、662によって回転可能に支持された保持ユニット72と、保持ユニット72にカップリング64を介して接続された回転モータ68と、を備えている。
平板部材62は、薄板状の部材から成り、中央部に矩形の開口63が形成されている。平板部材62は、板部材44の段付き開口25の段部に、XY平面とほぼ平行になる状態で、例えばボルト締結等によって固定されている。
2つの軸受部材661、662は、それぞれ直方体部材から成り、+X側に位置する軸受部材661が、−X側に位置する軸受部材662に比べ、幾分X軸方向に長い。2つの軸受部材661、662は、平板部材62に形成された開口63をX軸方向に挟むようにX軸方向に離間して配置され、平板部材62上面に、例えばボルト締結等で固定されている。図7に示されるように、一方の軸受部材661には、+X側の端面から−X側の端面に至る、円形の貫通孔801が形成されている。同様に、他方の軸受部材662には、+X側の端面から−X側の端面に至る、貫通孔801と同心で同一径の円形の貫通孔802が形成されている。
なお、本実施形態では軸受部材を2つ用意したが、2つに限るものではなく、軸部を支持できるのであれば1つとしても良い。
保持ユニット72は、図5(B)に取り出して示されるように、長手方向(X軸方向)に沿って配置された3つの部分、すなわち軸部731、732及び保持部74を有する。詳述すると、保持部74は、保持ユニット72の長手方向(X軸方向)の中央に設けられ、保持部74の長手方向一端面と他端面に同心かつ同径の2つの軸部(シャフト部)731、732の長手方向の一端面が固定されている。保持ユニット72は、図7に示されるように、軸部731が、軸受部材661の貫通孔801内に挿入され、軸部732が、軸受部材662の貫通孔802内に挿入されている。すなわち、保持ユニット72は、このようにして2つの軸受部材661、662によってX軸方向に平行な回転軸回りに回転可能に支持されている。保持ユニット72については、保持部74の構成を含めて後にさらに詳述する。
一方の軸受部材661には、図7に示されるように、貫通孔801の上側の部分に、軸受部材661の外部と貫通孔801の内部とを連通させる3つの管路811〜813がX軸方向に離間して形成されている。また、他方の軸受部材662には、貫通孔802の上側の部分に、軸受部材662の外部と貫通孔802の内部とを連通させる管路84が形成されている。
軸受部材661の3つの管路811〜813のうち、最も+X側に位置する管路811は、不図示の気体供給管を介して、所定の気体、例えば圧縮空気を供給する気体供給装置102に接続されている。気体供給装置102から供給される圧縮空気の流量等は、主制御装置20(図8参照)によって制御される。また、軸受部材661の貫通孔801は、+X半部の内径が他の部分より大きい。すなわち、貫通孔801は、段付きの円形開口である。貫通孔801の大径部、すなわち軸受部材661の+X半部の内周面には、円筒状の多孔質部材82が配置され、多孔質部材82の内周面は、貫通孔801の他の部分と同一面となっている。気体供給装置102から供給された圧縮空気は、管路811を通って多孔質部材82内に流入し、その多孔質部材82から、多孔質部材82と軸部731との対向面全域に向かって噴き出され、その噴き出された圧縮空気の静圧により、多孔質部材82と軸部731との間に、所定の隙間(ギャップ、クリアランス)、例えば数μm程度の隙間が形成されている。すなわち、軸受部材661の+X側端部と軸部731との間に静圧空気軸受(エアベアリング)が構成されている。
軸受部材661の3つの管路811〜813のうち、最も−X側に位置する管路813は、軸受部材661の−X側端部(管路812の−X側)に形成されている。管路813は、不図示の真空配管を介して真空ポンプ104に接続されている。真空ポンプ104は、主制御装置20(図8参照)によって制御されている。
軸受部材661の3つの管路811〜813のうち、中間に位置する管路812は、軸受部材661の貫通孔801内に配置された多孔質部材82より−X側の位置に形成されている。軸受部材661の軸部731との対向面(内周面)には、管路812が設けられた部分に、全周に渡る凹部83が形成され、これにより、軸受部材661と軸部731との間に円筒状(円環状)の空間(以下では、便宜上凹部83と同一の符号を用いて空間83と表記する)が形成されている。そして、この空間83は、管路812を介して軸受部材661の外部空間に連通している。すなわち、管路812は、大気開放口として機能している。このため、仮に、真空ポンプ104が作動中であっても、上述した気体供給装置102から供給され、多孔質部材82と軸部731との間に噴出され、−X側に流れる圧縮空気は、空間83内に流入し、管路812を通って外部(軸受部材661の外部空間)に排出される。従って、その圧縮空気が、凹部83より−X側に流入することは殆どない。
管路84は、軸受部材662の長手方向(X軸方向)の中央部に形成されている。管路84は、不図示の気体供給管を介して、所定の気体、例えば圧縮空気を供給する気体供給装置106(図8参照)に接続されている。軸受部材662の内周面(軸部732との対向面)には、軸受部材662のX軸方向全域にかけて円筒状の多孔質部材85が配置されている。すなわち、軸受部材662と軸部732との間には、軸受部材661と軸部731との間に構成された静圧空気軸受(エアベアリング)と同様の静圧空気軸受が構成されている。なお、気体供給装置106から供給される圧縮空気の流量等は、主制御装置20(図8参照)によって制御される。
保持ユニット72の説明に戻り、保持ユニット72の保持部74は、図5(B)に示されるように、平面視U字形状を有する本体部74aと、図4(B)及び図6(B)等に示されるウエハWを支持する支持位置に位置したときに、平板部材62の開口63から下方に突出するL字状のウエハ支持部74bとを有している。
保持ユニット72は、少なくとも図6(B)に示される、ウエハWを保持部74のウエハ支持部74bが支持する位置(すなわち、前述の支持位置)と、図6(A)に示される、支持位置から軸部731、732を回転軸として紙面内時計回りに90度回転し、ウエハ支持部74bとウエハWとが離間した位置(以下、離間位置と称する)との間で、回転モータ68によって駆動される。
本体部74aには、図5(B)に示されるように、U字部の底面(保持ユニット72(保持部74)が支持位置に位置したときのXZ平面に平行な面)の中央部に矩形の開口が形成されている。
ウエハ支持部74bには、図6(B)に示されるように、保持ユニット72(保持部74)が支持位置に位置したときに、ウエハを支持する支持面(ウエハ支持面)が、その+Y側半部に設けられ、そのウエハ支持面の+X側端部にウエハWを吸着する吸着部78が設けられている。吸着部78の中央には、開口78aが形成され、その開口78aにウエハ支持部74b及び本体部74aの内部に形成された管路91の一端が連通している。管路91は、図7に示されるように、他端が軸部731の内部に形成されたX軸方向に延びる管路92に連通している。また、軸部731は、支持位置に位置したとき(ウエハの保持が行われた状態にあるとき)は、ウエハの厚さ方向に沿った第1の方向(図6ではZ方向)と交差する第2の方向(図5及び図6ではX方向)に沿って延びた状態にある。
軸部731には、保持ユニット72が、支持位置に位置したとき、管路813と対向する位置に、管路92と軸部731の外部とを連通する管路93が形成されている。このため、保持ユニット72が、支持位置に位置したとき、管路93は、管路813に連通する。すなわち、保持ユニット72が支持位置に位置すると、管路813の外部(すなわち真空ポンプ104)とウエハ支持部74bに形成された開口78aとを連通する通路(流路)が形成される。この状態で、ウエハ支持部74bのウエハ支持面(吸着部78上面)にウエハWが支持され、主制御装置20により真空ポンプ104が作動されると、管路92及び管路91内が負圧(真空)状態となり、ウエハWがウエハ支持部74bの吸着部78に吸着保持される。
ここで、保持ユニット72が支持位置以外の位置、例えば離間位置に位置している場合、管路813と管路93とが連通しておらず、主制御装置20により真空ポンプ104が作動されても、吸着部78による吸引は、行われない。
また、一方(+X側)の軸部731には、図5(A)及び図5(B)に示されるように、+X端に+X方向から見て十字状の十字部材75が固定されている。また、十字部材75の+X側の面の十字部先端それぞれには、磁性体(例えば鉄)76が各1つ、合計4つ固定されている。一方、平板部材62には、図5(A)に示されるように、十字部材75に対向する位置にZ軸方向に延びる棒状の支持部材67が固定されている。支持部材67には、−X側の面の上端と下端部近傍に各1つ(合計2つ)の磁石61(永久磁石)が固定されている。2つの磁石61は、保持ユニット72が前述の支持位置、及び離間位置のそれぞれに位置したときに、4つの磁性体76のうちの2つと対向するよう位置決めされている。
回転モータ68は、平板部材62上に固定され、保持ユニット72の軸部732の−X端にカップリング64を介して接続されている。回転モータ68としては、一例としてブラシレスタイプのDCモータが用いられている。回転モータ68には、その回転軸の回転角度(回転方向の位置)を検出する絶対位置検出型のセンサ、一例としてアブソリュートエンコーダ101(図8参照)が設けられている。アブソリュートエンコーダ101は、使用するとき、又はその少し前、すなわち保持ユニット72が離間位置から支持位置に駆動されるとき、及び支持位置から離間位置に駆動されるときに、オフ状態からオン状態に設定される。主制御装置20(図8参照)は、アブソリュートエンコーダ101から供給された計測値(回転モータ68の回転軸の回転角度(回転方向の位置(絶対位置)))に基づいて、保持ユニット72を所定量回転駆動し、ウエハ支持部74bを所定位置に位置決めする。ここで、ウエハ支持部74bが支持位置又は離間位置に位置しているとき(アブソリュートエンコーダ101がオフ状態のとき)には、上述の2つの磁石61と、4つの磁性体76のうちの2つとが対向するので、磁石61と磁性体76との間に働く磁力によって保持ユニット72(ウエハ支持部74b)が固定(位置決め)される。また、保持ユニット72を駆動するときには、上述の磁力に打ち勝つ回転力を回転モータ68が発生することで、保持ユニット72(ウエハ支持部74b)が駆動される。
説明は前後するが、図5(B)に示されるように、ウエハ支持部74bには、保持ユニット72が支持位置に位置したときに上面となる面(ウエハ支持面)の中央部に反射鏡79が設けられている。本実施形態では、反射鏡79は、実際には、3つのウエハ支持ユニット125のそれぞれに各1つ設けられており、それら3つの反射鏡79のそれぞれに対して、上方から照明光を照射可能な落射照明方式の3つのエッジ位置検出系を含む計測系123(図8参照)が、設けられている。
計測系123を構成する各エッジ位置検出系としては、例えば照明光源、複数の反射鏡等の光路折り曲げ部材、レンズ等、及びCCD等の撮像素子などを含み、ウエハWのエッジ部の位置情報を検出する画像処理方式のエッジ位置検出系を用いることができる。計測系123により、ウエハWのエッジ検出が行われたとき、それらの撮像信号は、信号処理系116(図8参照)に送られる。
搬入ユニット121は、さらに、チャックユニット153のZ軸、θx、θyの各方向の位置を検出するチャックユニット位置検出系148(図8参照)を備えている。チャックユニット位置検出系148は、例えばメインフレームBDに固定された複数(例えば、3つ)のZ位置検出系(例えばレーザ変位計その他の光学式変位センサなど)によって構成されている。チャックユニット位置検出系148によって、チャックユニット153上面の複数箇所のZ位置が検出され、その検出結果は、主制御装置20(図8参照)に送られる。
この他、搬入ユニット121は、ウエハ平坦度検出系147(図8参照)を備えていても良い。ウエハ平坦度検出系147は、板部材44の複数箇所、例えばウエハWの外周部近傍の上方3箇所、中心部近傍の上方1箇所にそれぞれ配置された複数、例えば4つのウエハW表面(上面)のZ軸方向の位置(Z位置)を検出する不図示のZ位置検出系(例えば静電容量センサなどの変位センサなど)によって構成することができる。主制御装置20は、複数のZ位置検出系の計測値に基づいて、ウエハW上面の複数箇所のZ位置を検出し、その検出結果からウエハWの平坦度を求める。
図8には、露光装置100の制御系を中心的に構成し、構成各部を統括制御する主制御装置20の入出力関係を示すブロック図が示されている。主制御装置20は、ワークステーション(又はマイクロコンピュータ)等を含み、露光装置100の構成各部を統括制御する。
上述のようにして構成された本実施形態に係る露光装置100では、主制御装置20により、以下のような一連の処理が行われる。
すなわち、主制御装置20は、まず、レチクル搬送系(不図示)を用いてレチクルRをレチクルステージRST上にロードする。また、主制御装置20は、後述するようにしてウエハWをウエハステージWST(ウエハホルダWH)上にロードする。ロード後、一対のレチクルアライメント検出系14及び計測プレート30、並びにアライメント検出系ALGを用いて、レチクルアライメント、アライメント検出系ALGのベースライン計測、及びウエハアライメント(例えばEGA)等の準備作業を行う。なお、レチクルアライメント、ベースライン計測等については、例えば米国特許第5,646,413号明細書などに詳細に開示されている。また、EGAについては、例えば米国特許第4,780,617号明細書などに詳細に開示されている。ここで、EGAとは、ショット内の複数のウエハアライメントマークの位置検出データを用いて例えば上記米国特許明細書に開示される最小2乗法を利用した統計演算によりウエハW上の全てのショット領域の配列座標を求めるアライメント手法を意味する。
そして、主制御装置20は、レチクルアライメント、ベースライン計測、及びウエハアライメントの結果に基づいて、ウエハW上の各ショット領域の露光のための走査開始位置(加速開始位置)へウエハステージWSTを移動させるショット間移動動作と、各ショット領域に対しレチクルRのパターンを走査露光方式で転写する走査露光動作とを繰り返すことで、ステップ・アンド・スキャン方式でウエハW上の複数のショット領域に対する露光を行う。露光中のウエハWのフォーカス・レベリング制御は、前述の多点AF系54を用いてリアルタイムで行われる。
次に、ウエハステージWST上へのウエハWの搬入(ロード)手順について、図9(A)〜図11(B)に沿って、かつその他の図面を適宜参照しつつ説明する。
前提として、例えば、チャックユニット153は、図9(A)に示されるように、3つのZボイスコイルモータ144(図9(A)等では−Y側のZボイスコイルモータ144は不図示(図4(A)参照))により、ストローク範囲内の移動上限位置(+Z側の移動限界位置)近傍、すなわち前述した第1位置に移動され、その位置に維持されているものとする。また、このとき、3つのウエハ支持ユニット125は、それぞれの保持ユニット72が、離間位置に設定されているものとする(図6(A)参照)。
この状態で、まず、図9(A)に示されるように、ウエハWが搬送アーム149によってその下面が支持された状態で、チャックユニット153の下方(ローディングポジションLPの上方)に搬送される。ここで、ウエハWの搬送アーム149によるチャックユニット153の下方位置への搬送は、その搬送されるウエハWの1つ前に露光対象となるウエハ(以下、前ウエハと称する)に対する露光処理が、ウエハステージWST上で行われているときに行われても良いし、前ウエハに対するアライメント処理等が行われているときに行われても良い。
次に、主制御装置20は、調整装置115を介して、図9(A)に示されるように、複数のチャック部材124に対する流体(空気)の供給を開始することで、ウエハWが所定の距離(ギャップ)を保って非接触でチャックユニット153(複数のチャック部材124)に吸引される。なお、図9(A)等では、図中に簡略化してドットの塗りつぶしで示される、噴き出された空気の流れによって(より正確には、その流れによって生ずる負圧によって)、ウエハWが、チャックユニット153に吸引されているものとする。ただし、実際に噴き出された空気の状態は、必ずしもこれらに限定されるものではない。
次に、図6(A)及び図9(A)中にそれぞれ黒矢印で示されるように、主制御装置20は、3つのウエハ支持ユニット125のそれぞれが備える回転モータ68(図5(A)参照)を介してそれぞれの保持ユニット72を回転させ、それぞれ支持位置に位置させる。図9(A)には、X軸方向一側と他側の一対の保持ユニット72の回転駆動動作が、黒矢印で示されている。各保持ユニット72が支持位置まで駆動されると、各ウエハ支持部74bの吸着部78(開口78a)がウエハWの下面(裏面)に対向(接触)する(図9(B)及び図6(B)参照)。また、3つのウエハ支持ユニット125の保持ユニット72がそれぞれ支持位置に位置した状態では、ウエハ支持部74b上の反射鏡79がそれぞれウエハW裏面の外周縁の所定の位置(ノッチの位置を含む)に対向している(図6(B)参照)。
ウエハWの裏面が、各ウエハ支持部74bの吸着部78によって支持されると、主制御装置20は、各ウエハ支持部74bの軸受部材661に接続された真空ポンプ104(図7及び図8参照)を作動させて、真空吸引を行う。このとき、保持ユニット72(保持部74)が支持位置に位置しているので、真空ポンプ104が接続された各管路813からウエハ支持部74bに形成された開口78aまで至る流路が形成されている。このため、真空ポンプ104が作動されると、ウエハWの裏面は、各ウエハ支持部74bの吸着部78に吸着保持される。
このとき、ウエハWは、チャックユニット153による上方からの吸引によって、Z、θx、θyの3自由度方向の移動が制限されると共に、3つのウエハ支持ユニット125による下方からの吸着支持によって、X、Y、θzの3自由度方向の移動が制限され、これにより、6自由度方向の移動が制限されている。
ウエハWが、このときの状態、すなわちチャックユニット153による吸引(非接触保持)及び3つのウエハ支持ユニット125による吸着(支持)が行われた状態で、ローディングポジションLPの上方で待機するように、露光装置100の処理シーケンスが定められている。露光装置100では、ウエハWがローディングポジションLP上方で待機している間に、ウエハテーブルWTB上に保持された前ウエハに対する露光処理(及びそれに先立つアライメント処理)などが行われている。また、このとき搬送アーム149によるウエハWの真空吸着を停止した状態にしておいても良い。なお、上述したチャックユニット153(複数のチャック部材124)によるウエハWの吸引と、3つのウエハ支持ユニット125による下方からのウエハの支持とは、逆の順番に行われても良いし、両者の動作が一部並行して行われても良い。
ローディングポジションLP上方でのウエハWの待機中に、主制御装置20は、計測系123(図8参照)を用いてウエハWのエッジ検出を行う。計測系123の3つのエッジ位置検出系の検出信号(撮像信号)は、信号処理系116(図8参照)に送られる。信号処理系116は、例えば米国特許第6,624,433号明細書などに開示されている手法により、ウエハのノッチを含む周縁部の3箇所の位置情報を検出して、ウエハWのX軸方向、Y軸方向の位置ずれと回転(θz回転)誤差とを求める。そして、それらの位置ずれと回転誤差との情報は、主制御装置20に供給される(図8参照)。
上述のウエハWのエッジ検出の開始と前後して、主制御装置20は、図9(B)中に黒矢印で示されるように、搬送アーム149を下方に駆動し、搬送アーム149とウエハWとを離間させた後、搬送アーム149をローディングポジションLPの上方から退避させる。
前ウエハの露光処理が完了し、搬出ユニット122(図8参照)により前ウエハがウエハテーブルWTB上からアンロードされると、図10(A)に示されるように、主制御装置20により、粗動ステージ駆動系51A(図8参照)を介してウエハステージWSTがチャックユニット153の下方(ローディングポジションLP)に移動される。そして、図10(A)中に白抜き矢印で示されるように、主制御装置20は、3本の上下動ピン140を有するセンター支持部材150(図10(A)等では不図示、図4(B)参照)を、駆動装置142を介して上方に駆動する。この時点でも、計測系123によるウエハWのエッジ検出は続行されており、主制御装置20は、ウエハWがウエハステージWSTの所定位置に搭載されるよう、ウエハWの位置ずれ及び回転誤差情報に基づいて、ウエハステージWSTをウエハWのずれ量(誤差)と同じ量だけ同じ方向に微小駆動する。
そして、図10(B)に示されるように、3本の上下動ピン140の上面がチャックユニット153に吸引されたウエハWの下面に当接すると、主制御装置20は、センター支持部材150の上昇を停止する。これにより、ウエハWは、位置ずれ及び回転誤差が補正された状態で、3本の上下動ピン140によって支持される。
ここで、待機位置にあるチャックユニット153に吸引されたウエハWのZ位置は、ある程度正確にわかる。従って、主制御装置20は、変位センサ145の計測結果に基づいて、センター支持部材150を基準位置から所定量駆動することで、3本の上下動ピン140をチャックユニット153に吸引されたウエハWの下面に当接させることができる。しかし、これに限らず、センター支持部材150(3本の上下動ピン140)の上限移動位置で、3本の上下動ピン140がチャックユニット153に吸引されたウエハWの下面に当接するように、予め、設定しておいても良い。
その後、主制御装置20は、不図示のバキュームポンプを作動し、3本の上下動ピン140によるウエハW下面に対する真空吸着を開始する。なお、複数のチャック部材124によるウエハWの吸引は、この状態でも続行されている。すなわち、複数のチャック部材124による吸引と、3本の上下動ピン140の下方からの支持による摩擦力によりウエハWは、6自由度方向の移動が制限されている。従って、この状態では、ウエハ支持ユニット125のウエハ支持部74bによるウエハWの吸着(接触保持)を解除しても何ら問題は生じない。
そこで、ウエハWが3本の上下動ピン140に支持(吸着保持)されると、主制御装置20は、真空ポンプ104(図8参照)の作動を停止した後、図10(B)及び図12(A)中に黒矢印で示されるように、保持ユニット72を回転させ、3つのウエハ支持ユニット125が備える保持ユニット72を、支持位置から離間位置まで駆動する。これにより、図12(B)に示されるように、各保持ユニット72が離間位置に位置決めされ、各ウエハ支持部74bによるウエハWの支持が解除される。
次に、主制御装置20は、図11(A)中に黒矢印及び白矢印でそれぞれ示されるように、ウエハWを吸引及び支持しているチャックユニット153及び3本の上下動ピン140(センター支持部材150)を、それぞれ3つのZボイスコイルモータ144及び駆動装置142を介して、下方へ駆動する。これにより、ウエハWに対するチャックユニット153(複数のチャック部材124)による吸引状態と3本の上下動ピン140による支持状態とを維持して、チャックユニット153と3本の上下動ピン140(センター支持部材150)とが下方へ駆動される。チャックユニット153と3本の上下動ピン140(センター支持部材150)とは同期して駆動されても良いし、異なる速度で駆動されても良い。後者の場合、ウエハWの変形が抑制されるように、両者の速度が調整されることが望ましい。この場合のチャックユニット153の駆動は、主制御装置20が、チャックユニット位置検出系148の検出結果に基づいて、3つのZボイスコイルモータ144を駆動することで行われる。
上述のチャックユニット153と3本の上下動ピン140(センター支持部材150)との駆動は、図11(B)に示されるように、ウエハWの下面がウエハテーブルWTB上のウエハホルダWHの上面(ウエハ支持面)に当接するまで行われる。
そして、ウエハWの下面がウエハホルダWHに当接すると、主制御装置20は、調整装置115を介して全てのチャック部材124からの高圧空気流の流出を停止して、チャックユニット153によるウエハWの吸引を解除し、ウエハホルダWHによるウエハWの吸着を開始する。
次いで、主制御装置20は、図11(B)中に黒矢印で示されるように、3つのZボイスコイルモータ144を介してチャックユニット153を所定の待機位置(第1位置又はその近傍の位置)まで上昇させる。これにより、ウエハWのウエハテーブルWTB上へのロード(搬入)が終了する。
ここで、チャックユニット153が上方に駆動され、停止されると(又は上昇中に)、主制御装置20は、前述した計測系123を用いて、ウエハWのエッジ位置の検出を行う。この場合、ウエハWのエッジ検出は、ウエハテーブルWTB上の3つの反射鏡86に、計測系123の3つのエッジ位置検出系からの計測ビームがそれぞれ照射され、各反射鏡86からの反射ビームを3つのエッジ位置検出系の撮像素子が受光することで行われる。計測系123の3つのエッジ位置検出系の検出信号は、信号処理系116(図8参照)に送られ、ウエハWの位置ずれと回転誤差との情報が、主制御装置20に供給される。主制御装置20は、その位置ずれと回転誤差との情報とをオフセット量としてメモリに記憶しておき、後のウエハアライメント時、又は、露光の際などに、上記オフセット量を考慮してウエハテーブルWTBの位置を制御する。なお、前述の待機中にウエハWのエッジ検出が行われ、その結果得られた位置ずれと回転誤差が補正された状態で、ウエハWは、3本の上下動ピン140に支持された後、ウエハテーブルWTB上に搭載されているので、ウエハWのウエハテーブルWTB上へのロード後のウエハWのエッジ検出は必ずしも行わなくても良い。
以上説明したように、本実施形態に係る搬入ユニット121及びこれを備えた露光装置100によると、主制御装置20は、ウエハWをウエハテーブルWTB上にロードする際に、ウエハWをチャックユニット153を介して上方から吸引保持すると同時に、回転(例えば、起伏回動(水平面内の一軸回りの往復回転)ともいう)が可能な3つのウエハ支持ユニット125によって、ウエハW周縁部を下方から支持させる。これにより、ウエハWが、チャックユニット153を介して上方から吸引保持されているとき、3本の上下動ピン140(センター支持部材150)に渡されるまでの間に、鉛直方向は勿論、水平面内でも位置ずれすることがない。また、チャックユニット153が駆動装置によって、一軸回りに回転駆動され、第1位置に位置したとき、吸着部を含む保持部の一部がウエハWに下方から接触する。従って、このチャックユニット153を複数(例えば3組)用い、それぞれの吸着部によってウエハWの異なる位置を下方から保持することにより、ウエハWを小さいスペースで保持することが可能になる。
また、主制御装置20は、ウエハWをウエハステージWST上にロードする途中、具体的にはウエハWをチャックユニット153と3つのウエハ支持ユニット125とで支持している際に、計測系123を介してウエハWの位置ずれ及び回転ずれを計測し、その計測結果に基づいて、ウエハWの位置ずれ及び回転ずれが補正されるように、ウエハステージWSTを駆動する。従って、ウエハWを位置再現性良く、ウエハテーブルWTB上にロードすることができる。
また、回転が可能な3つのウエハ支持ユニット125を備えた上下動可能なチャックユニット153を用いるので、水平面内で回転するウエハ支持部材を用いる場合と異なり、狭い空間内であってもウエハWのウエハホルダWH上への搬入が可能となる。
また、主制御装置20は、ウエハWをウエハテーブルWTB上にロードする際に、ウエハWに対するチャックユニット153(複数のチャック部材124)による吸引状態と3本の上下動ピン140による支持状態とを維持して、チャックユニット153と上下動ピン140(センター支持部材150)とを、上下動させることができる。これにより、ウエハWの平坦度を所望の範囲内の値に維持した状態でウエハステージWST上にロードすることができる。
また、チャックユニット153とウエハ支持ユニット125とを共通のZボイスコイルモータ144を介してZ軸方向に駆動しているので、部品点数を減らすこともできる。
また、チャックユニット153の自重を一対の重量キャンセル装置131によって支持しているので、チャックユニット153を上下方向に駆動する際の力を小さくすることができ、各Zボイスコイルモータ144のサイズを小さくすることができる。
また、本実施形態に係る露光装置100によると、ウエハテーブルWTB上に平坦度が高い状態で、かつ位置再現性良くロードされたウエハWに対して、ステッピング・アンド・スキャン方式で露光が行われるので、ウエハW上の複数のショット領域のそれぞれに対し、重ね合わせ精度が良好で、かつデフォーカスのない露光が可能となり、複数のショット領域に対してレチクルRのパターンを良好に転写することができる。
なお、ウエハWをチャックユニット153で吸引保持している間に、3つのウエハ支持ユニット125によってXY平面内でのウエハWの位置ずれを効果的に抑制できるので、計測系123は、必ずしも設けなくても良い。
《第2の実施形態》
次に、第2の実施形態に係る露光装置について、図13及び図14(A)〜図14(C)に基づいて説明する。本第2の実施形態に係る露光装置では、搬入ユニット121のチャックユニット153が備える3つのウエハ支持ユニット125のそれぞれに代えて、図13に示されるウエハ支持ユニット125aが設けられている。チャックユニット153のその他の部分の構成、及び搬入ユニット121のその他の構成、搬入ユニット121以外の部分の構成などは、前述した第1の実施形態に係る露光装置100と同様である。従って、以下では、上記のウエハ支持ユニット125aを中心として、露光装置100との相違点について説明する。
図13と図5(A)とを比較するとわかるように、ウエハ支持ユニット125aは、前述のウエハ支持ユニット125と同様の構成部分に加えて、図13に示されるクリーナユニット152を備えている。クリーナユニット152は、吸着部78に付着したレジスト等を清掃するためのものである。なお、クリーナユニット152をそれぞれ有する3つのウエハ支持ユニット125aは、配置が異なる点を除き同じ構成であるので、以下では、板部材44の中心に対して−Y方向に位置する段付き開口25内に収納されたウエハ支持ユニット125aを代表的に取り上げて、クリーナユニット152を中心として説明する。
クリーナユニット152は、図13に示されるように、平板部材62上面の−Y側端部(前述の保持ユニット72等の−Y側)に配置されている。クリーナユニット152は、図13及び図14(A)等に示されるように、平板部材62の+X端から軸受部材662に対向する位置の近傍までX軸方向に延設されたガイド部材31、ガイド部材31上面に固定されたエアシリンダ32、エアシリンダ32のピストンロッド(不図示)の先端(+X側端)に固定され、ガイド部材31に沿ってエアシリンダ32によりX軸方向に駆動される平板部材33、及び平板部材33の−X側面に固定され、先端に砥石35が固定された棒状部材34等を備えている。
エアシリンダ32の制御(エアシリンダを構成するシリンダとその内部を摺動するピストンとで区画されるシリンダ内部の空間の圧力の制御)は、主制御装置20によって行われ、これにより、砥石35がX軸方向に関して保持部74の+X側に位置する待機位置(図14(A)及び図14(B)参照)と吸着部78の−X側に位置する研磨終了位置(図14(C)参照)とを含む所定ストローク範囲で駆動される。砥石35は、例えば、炭化ケイ素等から成る。
次に、本第2の実施形態に係る露光装置における搬入ユニット121による、特にローディングポジションLPの上方でウエハを保持して待機しているときの動作を、クリーナユニット152の動作を中心に、その待機中の前後の動作を含めて、図14(A)〜図14(C)に基づいて説明する。前提として、例えば、ウエハ支持ユニット125aは、図14(A)に示されるように、保持ユニット72が支持位置に位置し、ウエハW(図14(A)では不図示、図6(B)等参照)を下方から吸着支持しているものとする。このとき、主制御装置20は、エアシリンダ32を介して、砥石35を待機位置に位置させている。
上述の実施形態で説明したように、ウエハWが3本の上下動ピン140(図12(A)参照)により、下方から支持されると、ウエハ支持部74b(吸着部78)によるウエハWの吸着を解除し、図14(A)中に白抜き矢印で示されるように、主制御装置20は、回転モータ68を介して保持ユニット72を支持位置から離間位置まで駆動する。
そして、前述した手順で、ウエハWがウエハテーブルWTB上にロードされた後、ウエハステージWSTがローディングポジションLPから遠ざかると、主制御装置20は、図14(B)中に白抜き矢印で示されるように、エアシリンダ32を介して、砥石35を待機位置から研磨終了位置に向けて−X方向に駆動する。この移動の途中で、砥石35は、ウエハ支持部74bの吸着部78に接触し、その接触状態を維持しながら−X方向に駆動される。すなわち、砥石35は、吸着部78を含むウエハ支持部74bのウエハ支持面に沿って摺動しながら−Y方向に駆動される。この砥石35の摺動によりウエハ支持面が研磨される。従って、このとき、吸着部78にレジスト等が付着している場合には、砥石35によりレジスト等が吸着部78から剥がされる。なお、この砥石35による研磨作業は、上述したように、ローディングポジションLPにウエハステージWSTが位置していないとき、例えば、ウエハWに対するアライメント中又は露光中等に行われる。
そして、砥石35による吸着部78の研磨が終了すると、図14(C)中に白抜き矢印で示されるように、主制御装置20は、エアシリンダ32を介して砥石35を研磨終了位置から待機位置まで+X方向に駆動する。その後、新たなウエハが搬送アーム149によってローディングポジションLPの上方に搬送され、チャックユニット153によって上方から吸引されるとともに3つのウエハ支持ユニット125によって下方から吸着保持される。そして、この状態で、前ウエハWに対する露光(レチクルRのパターンの転写)が終了し、搬出ユニット122(図8参照)によって外部に搬出されて、ウエハテーブルWTB上へのその新たなウエハのロードが可能となるまで待機されることとなる。
本第2の実施形態に係る露光装置によると、前述した第1の実施形態と同等の効果を得られる他、ウエハWに塗布されたレジストがウエハWの下面にまで垂れ、そのレジストが3つのウエハ支持ユニット125aのウエハ支持部74bの吸着部78に付着した場合であっても、吸着部78は砥石35により研磨されるので、新たなウエハに吸着部78に付着したレジストを付着させるおそれがなく、露光精度を良好に保つことができる。また、砥石35による研磨作業は、ローディングポジションLP(チャックユニット153の下方)にウエハステージWSTが配置されていないときに行われるので、剥がれ落されたレジストがウエハホルダWH等に付着し、ウエハホルダWH上に新たに載置されるウエハWの平面度が悪化する等により、露光結果に悪影響を及ぼすおそれがない。
《第2の実施形態の変形例》
上記第2の実施形態に係る露光装置において、3つのウエハ支持ユニット125aのそれぞれに代えて、図15(A)〜図15(C)に示される変形例に係るウエハ支持ユニット125bを設けても良い。本変形例に係るウエハ支持ユニット125bでは、クリーナユニット152に代えてクリーナユニット152aが用いられている。クリーナユニット152aは、前述のクリーナユニット152の構成に加え、平板部材33を、−X方向に常時付勢する弾性体(弾性部材)、例えば圧縮ばね(圧縮コイルばね)36が設けられている。
圧縮ばね36は、平板部材33と、平板部材62上面の+X側端部に固定された支持部材37との間に設けられている。本変形例では、3つのウエハ支持ユニット125bの保持ユニット72がウエハ支持位置にあるとき、主制御装置20(図8参照)によりエアシリンダ32が制御され、圧縮ばね36の弾性力による−X方向の付勢力に抗して平板部材33が+X方向に駆動され、砥石35が前述した待機位置で待機する(図15(A)参照)。
3つのウエハ支持ユニット125bの保持ユニット72がウエハ支持位置にあり、かつ砥石35が待機位置にあるとき、何らかの原因で、エアシリンダ32内への圧縮空気の供給等を含み、ウエハ支持ユニット125bに対する用力の供給が停止した場合、図15(B)に示されるように、圧縮ばね36の付勢力により、平板部材33、棒状部材34及び砥石35が−X方向に駆動され、砥石35の−X側の面が本体部74aの+X側の面に圧接する。これにより、仮に、用力の供給停止の要因が、地震等であり、磁石61と磁性体76との間に働く磁力のみでは、ウエハの支持状態を維持することが困難な事態になっても、その磁力と、砥石35と本体部74aとの間の摩擦力とによって、3つのウエハ支持ユニット125bによるウエハWの支持状態を維持することができる。
一方、3つのウエハ支持ユニット125bの保持ユニット72が離間位置にあり、かつ砥石35が待機位置にあるとき、何らかの原因で、エアシリンダ32内への圧縮空気の供給等を含み、ウエハ支持ユニット125bに対する用力の供給が停止した場合、圧縮ばね36の付勢力により、平板部材33、棒状部材34及び砥石35が−X方向に駆動され、図15(C)に示されるように、棒状部材34及び砥石35が、ウエハ支持部74bと本体部74aとの間に挿入され、砥石35が研磨終了位置に位置する。すなわち、図15(C)の状態では、棒状部材34及び砥石35が、ウエハ支持部74bの吸着部78が設けられた面(ウエハ支持面)に接している。これにより、仮に、用力の供給停止の要因が、地震等であり、磁石61と磁性体76との間に働く磁力のみでは、保持ユニット72を離間位置に維持することが困難な事態になっても、圧縮ばね36の弾性力により砥石35が研磨終了位置にあり、棒状部材34及び砥石35が、ウエハ支持部74bのウエハ支持面に接した状態を維持することができ、保持ユニット72の不用意な回転を防止することができる。
上述のように、本変形例に係るウエハ支持ユニット125bでは、地震等その他の要因により用力の供給が停止し、エアシリンダ32内への圧縮空気の供給が停止された場合であっても、保持ユニット72を、その用力供給停止時の状態に維持することができる。従って、3つのウエハ支持ユニット125bの保持ユニット72がウエハ支持位置にあり、ウエハ支持部74bがウエハWを吸着支持しているときに、地震その他の要因により用力の供給が停止した場合であっても、ウエハWの落下を防止することができる。また、3つのウエハ支持ユニット125bの保持ユニット72が離間位置にあるとき、地震等なんらかの要因により用力の供給が停止した場合であっても、ウエハ支持部74b等がウエハステージWSTに接触し、損傷するおそれがない。
なお、本変形例では、研磨時の砥石35の駆動は、主制御装置20が、エアシリンダ32内の気室の内圧が、圧縮ばね36の不勢力より幾分小さくなるように、エアシリンダ32を制御することで行われる。
なお、上記変形例では、砥石35を圧縮ばね36の付勢力によって砥石35を本体部74aに圧接させることにより、砥石35と本体部74aとの摩擦力より、保持ユニット72の回転を防止していたが、砥石35とは異なる別の部材を用いて、その別の部材と本体部74aとの間の摩擦力により保持ユニット72の回転を防止することとしても良い。保持ユニット72が離間位置にあるとき、保持ユニット72の回転を防止するためには、棒状部材34のみであっても良く、砥石35を特に用いる必要はない。
また、上記変形例では、圧縮ばね36と本体部74aと間の摩擦力、又は砥石35がウエハ支持部74bと本体部74aとの間に挿入されることで、保持ユニット72の回転が防止されるものとしたが、これに限らず、例えば、地震等によりエアシリンダ32内への圧縮空気の供給が停止された場合に、磁石61と磁性体76との間の磁力によって、ウエハ支持部74bが回転しないのであれば、圧縮ばね36等を設けなくても良い。
《第3の実施形態》
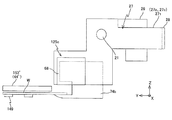
次に、第3の実施形態について図16(A)〜図17に基づいて説明する。ここで、前述した第1の実施形態に係る露光装置と同一又は同等の構成部分については、同一の符号を用いるとともにその説明を省略する。本第3の実施形態に係る露光装置は、搬入ユニット121の構成が、前述した第1の実施形態に係る露光装置100と一部相違するが、その他の部分の構成は、同様になっている。以下では、相違点を中心として説明する。
前述した第1の実施形態では、3つのウエハ支持ユニット125は、チャックユニット153の一部を構成する板部材44に固定され、チャックユニット153の一部を構成していた。しかし、本第3の実施形態では、3つのウエハ支持ユニット125cは、チャックユニットの一部を構成せず、図16(A)等に示されるように、チャックユニット153’の外部の支持部材26に、軸部材21を介して回転可能に支持された側面視S字状の回転部27に取付けられている。支持部材26は、メインフレームBDに不図示の支持部材を介して吊下げ支持されている。ウエハ支持ユニット125cは、基本的には、前述のウエハ支持ユニット125と同様に構成されているが、平板部材62は取り除かれている。チャックユニット153’は、前述のチャックユニット153から、3つのウエハ支持ユニット125が取り除かれたような構造となっている。チャックユニット153’の一部を構成する板部材44’には、ウエハ支持ユニットを収納するための3つの段付き開口は設けられていない。
3つのウエハ支持ユニット125cは、前述した第1実施形態と同様に、板部材44の中心に対して2時、6時、10時の方向の板部材44の外周縁から僅かに外側に離れた位置に配置されている。3つのウエハ支持ユニット125cは、配置が異なる点を除き、同じ構成であるので、以下では、板部材44の−Y側(中心に対して6時の方向)に位置するウエハ支持ユニット125cを代表的に取り上げて説明する。
ウエハ支持ユニット125cは、図16(A)に示されるように、回転部27の回転軸(軸部材21)の−Z側かつ+Y側の位置に取付けられている。また、軸部材21は、X軸方向を長手方向として支持部材26に固定されている。ここで、回転部27は、軸部材21に対し、その軸部材21回りに回転可能に取付けられている。
ウエハ支持ユニット125cは、前述のウエハ支持ユニット125と同様、2つの軸受部材661、662(図16(A)〜図17では不図示、図5(A)参照)と、該2つの軸受部材661、662によってX軸に平行な軸回りに回転可能に支持された保持ユニット72と、保持ユニット72にカップリング64(図16(A)〜図17では不図示、図5(A)参照)を介して接続された回転モータ68と、を備えている。
回転部27は、軸部材21に対して回転可能に取付けられ、それぞれの一端部にX軸方向に伸びる板部材から成る連結部材28が固定され、これにより一体化された3枚の側面視S字状の板部材271、272、273(図16(A)等では、板部材272、273は、板部材271の奥側に隠れている。)を有している。板部材271の−X側の面に回転モータ68の筐体の+X側の面が固定され、回転モータ68の回転軸は、板部材271に形成された開口を介して板部材271の+X側に先端部が露出している。この回転軸にカップリング64を介して保持ユニット72の一端(軸部731)が接続されている。そして、保持ユニット72を回転可能に支持する2つの軸受部材661、662が、それぞれ板部材272、273に形成された矩形開口内に挿入され、板部材272、273に個別に固定されている。すなわち、ウエハ支持ユニット125cでは、このようにして2つの軸受部材661、662及び回転モータ68が回転部27に対して固定されており、保持ユニット72が、回転モータ68の駆動力により、回転部27に対して回転モータ68の回転軸と同軸の軸回りに回転可能に構成されている。
本第3の実施形態に係る露光装置では、ウエハ支持ユニット125c及びチャックユニット153’以外の搬入ユニット121の他の部分の構成、及び搬入ユニット121以外の部分の構成は、前述した第1の実施形態に係る露光装置100と同様になっている。
本第3の実施形態に係る露光装置では、上述した構成の相違に対応して、ウエハステージWST上へのウエハWの搬入(ロード)手順の一部が、前述の第1の実施形態に係る露光装置100と相違する。以下、その相違部分について、図16(A)〜図17に基づいて説明する。前提として、チャックユニット153’は、ストローク範囲内の移動上限位置(+Z側の移動限界位置)近傍、すなわち前述した第1位置に移動され、その位置に維持されているものとする。また、このとき、3つのウエハ支持ユニット125cは、それぞれのウエハ支持部74bが離間位置に位置し、搬送アーム149によって、ウエハWがチャックユニット153’の下方に搬送されているものとする(図16(A)参照)。
この状態で、主制御装置20は、図16(A)中に黒矢印で示されるように、3つのウエハ支持ユニット125cのそれぞれが備える回転モータ68を介してそれぞれの保持ユニット72を、離間位置から、支持位置まで駆動する。本第3の実施形態では、各ウエハ支持ユニット125cを支持する回転部27が、軸部材21回りに回転可能であるため、各保持ユニット72が回転した際の慣性力によって、各ウエハ支持ユニット125c及び該ウエハ支持ユニット125cが取付けられた各回転部27(以下、単に各回転部27等という)は、図16(A)中に白抜き矢印で示されるように、軸部材21を中心として紙面内、反時計回りに僅かに回転する。
そして、各ウエハ支持ユニット125cの回転モータ68による回転駆動が停止すると、各回転部27等は、自重によるモーメント作用により、図16(B)中に白抜き矢印で示されるように、軸部材21を中心として紙面内時計回りに回転する。そして、図17に示されるように、ウエハ支持ユニット125c(吸着部78)と、ウエハW下面とが当接すると、主制御装置20は、上述の第1実施形態と同様に、吸着部78によるウエハWの吸着保持を開始する。以降、主制御装置20により、前述した第1の実施形態と同様のシーケンスが実行される。
以上説明した本第3の実施形態に係る露光装置によると、前述した第1の実施形態に係る露光装置100と同等の効果を得られる他、搬送アーム149によってチャックユニット153の下方に搬送されたウエハWの外縁部が、自重等の影響により下に反っているような場合でも、3つのウエハ支持ユニット125cによって、確実に安定的に、ウエハWを下方から支持することができる。
なお、上記第3の実施形態では、回転部27が、軸部材21に対して回転可能に支持されていたが、これに限らず、軸部材21は回転部27に固定され、その軸部材21がエアベアリング等を介して回転可能な状態で、支持部材26に支持されていても良い。かかる場合にも、3つのウエハ支持ユニット125cのそれぞれが備える回転モータ68を介してそれぞれの保持ユニット72を、離間位置から、支持位置まで駆動する際の、ウエハ支持ユニット125c及び回転部27の動作は、上記第3の実施形態と同様になる。
《第4の実施形態》
次に、第4の実施形態に係る露光装置について、図18〜図21に基づいて説明する。本第4の実施形態に係る露光装置では、搬入ユニット121のチャックユニット153が備える3つのウエハ支持ユニット125のそれぞれに代えて、図18〜図20に示されるウエハ支持ユニット125dが設けられている。チャックユニット153のその他の部分の構成、及び搬入ユニット121のその他の構成、搬入ユニット121以外の部分の構成などは、前述した第1の実施形態に係る露光装置100と同様である。したがって、以下では、上記のウエハ支持ユニット125dを中心として、露光装置100との相違点について説明する。なお、3つのウエハ支持ユニット125dは、配置が異なる点を除き同じ構成であるので、以下では、板部材44の中心に対して−Y方向に位置する段付き開口25内に収納されたウエハ支持ユニット125dを代表的に取り上げて説明する。
図18と図5(A)とを比較するとわかるように、ウエハ支持ユニット125dでは、ウエハ支持ユニット125dが備える保持ユニット72を回転駆動する駆動源として、前述の回転モータ68に代えて、エアシリンダ168が設けられている。また、保持ユニット72の軸部732の一端が、平板部材62上に設けられた運動変換部164に接続されている。
エアシリンダ168は、シリンダ部と、シリンダ部の長手方向に沿ってスライド移動するピストン部とを有し、平板部材62の−Y側端部の−X側端部近傍の位置に、Y軸方向を長手方向として、土台169を介して固定されている。ピストン部は、シリンダ部の内周面にその外周面がほぼ接する円形の板部材から成るピストンと、ピストンの一面の中心部に一端(−Y側端)が固定され、シリンダ部の長手方向(Y軸方向)に延びるピストンロッド168a(図18、図19(A)及び図19(B)参照)とを有する。
エアシリンダ168のシリンダ部の底部(−Y端部)には、チューブ180の一端が接続され、該チューブ180の他端は、ソレノイドバルブ201を介してコンプレッサ202(いずれも図18、図19(A)及び図19(B)では不図示、図21参照)に接続されている。ソレノイドバルブ201は、3つの出入口を有し、そのうちの2つの出入口(便宜上、第1の出入口、第2の出入口と呼ぶ)がソレノイドバルブ201が備える弁によって択一的に開閉される。残りの1つの出入口(以下、第3の出入口と呼ぶ)には、弁は設けられていないため、常時開放されている。
201が備えるソレノイドに電圧が印加されていない状態(以下、オフ状態と呼ぶ)では、弁は、ばね等の付勢部材の付勢力によって第1の出入口を閉鎖している。したがって、第2の出入口は、通常開放されている。一方、ソレノイドバルブ201が備えるソレノイドに電圧が印加されると、弁は、ばね等の付勢部材の付勢力に抗して駆動され、第2の出入口を閉鎖するとともに第1の出入口を開放する。以下では、ソレノイドに電圧が印加された状態を、オン状態と呼ぶ。
ソレノイドバルブ201の第1の出入口にコンプレッサ202が空気供給用のチューブ(不図示)を介して接続され、第3の出入口はチューブ180(図18等参照)を介してエアシリンダ168に接続されている。残りの第2の出入口は、大気に開放されている。以下では、この第2の出入口を大気開放口と呼ぶ。
したがって、ソレノイドバルブ201がオン状態で、コンプレッサ202が作動されると、コンプレッサ202が生成する圧縮空気が空気供給用のチューブ、ソレノイドバルブの内部空間及びチューブ180を介してエアシリンダ168のシリンダ部の内部に供給される。一方、ソレノイドバルブ201がオフ状態では、エアシリンダ168のシリンダ部の内部空間とソレノイドバルブ201の外部空間とが大気開放口を介して連通される。したがって、この状態で、後述するように、エアシリンダ168のピストン部が圧縮ばねの弾性力により−Y側に押圧されると、シリンダ部内部の空気が大気開放口から外部に排出される。
なお、3つのウエハ支持ユニット125dは、同じ構成であるので、3つのウエハ支持ユニット125dのそれぞれがエアシリンダ168を備えており、各エアシリンダ168に個別に接続された3つのソレノイドバルブ201が設けられている(図21参照)が、これら3つのソレノイドバルブ201は、空気供給用のチューブ(不図示)をそれぞれ介して同一のコンプレッサ202に接続されている。
運動変換部164は、エアシリンダ168のピストン部の直線運動を、保持ユニット72の回転運動に変換する。運動変換部164は、図19(A)に簡略化して示されるように、軸部732の外周部に一体的に固定されたカム165と、カム165に係合するスライド部材166とを有するカム機構を含む。カム165は、一端部に軸部732の外径より僅かに小さい(例えば数ミクロン程度小さい)直径の開口部が形成され、その開口部内に軸部732が挿入された状態で、軸部732と一体化されている。軸部732とカム165には、対向する面にそれぞれキー溝(不図示)が形成され、これらのキー溝に嵌合するキー(不図示)を介して軸部732にカム165が取付けられている。カム165の他端には、U字状の凹部165aが形成されている。
ウエハ支持ユニット125dでは、スライド部材166が、エアシリンダ168のピストンロッド168aの先端に一体的に設けられている。スライド部材166には、一面にカム165のU字状凹部165aに係合する円柱状の凸部166aが設けられている。このため、スライド部材166が、ピストン部と一体でエアシリンダ168の長手方向(Y軸方向)に駆動されると、カム165が、軸部732と一体で軸部732の中心軸回りに、回転する。これにより、保持ユニット72が、軸部732及び軸部731の中心軸回りに回転する。
カム165及びスライド部材166を含むカム機構が、運動変換部164の筐体164a(図18参照)の内部に収納されている。
ウエハ支持ユニット125dでは、図19(A)及び図19(B)に示されるように、平板部材62上面の運動変換部164を挟んでエアシリンダ168と反対側の位置には、支持ブロック190が固定されている。支持ブロック190とスライド部材166との間には、Y軸方向を伸縮方向とする圧縮コイルばね(圧縮ばね)192が、配置されている。圧縮ばね192は、一端が支持ブロック190の−Y側の面に接続され、他端がスライド部材166の+Y側端面に設けられた円筒状の凸部の内部に挿入されている。
ウエハ支持ユニット125dでは、ソレノイドバルブ201がオン状態に設定され、コンプレッサ202が作動すると、コンプレッサ202から空気供給用のチューブ、ソレノイドバルブ201及びチューブ180を介してエアシリンダ168のシリンダ部の内部に加圧空気が供給され、シリンダ部内の圧力が上昇するとスライド部材166が圧縮ばね192の付勢力に抗して、+Y方向に駆動される。シリンダ部内に加圧空気が供給され続け、その圧力が上昇する間は、スライド部材166は、+Y方向に駆動されるが、運動変換部164の筐体164aの内部に設けられたストッパ部材(不図示)にスライド部材166が当接する第1の移動限界位置で停止する。その後、加圧空気が供給される間は、スライド部材166はその第1の移動限界位置に位置決めされた状態が維持される。図19(A)には、上記の第1の移動限界位置にスライド部材166が位置決めされた状態が示されている。この図19(A)の状態では、保持ユニット72は、ウエハ支持部74bとウエハWとが離間した前述の離間位置にある。
一方、ウエハ支持ユニット125dでは、スライド部材166が、第1の移動限界位置に位置決めされた状態にあるとき、ソレノイドバルブ201がオン状態からオフ状態に切り換えられ、コンプレッサ202が停止されると、コンプレッサ202からのシリンダ部への加圧空気の供給が停止されるとともに、エアシリンダ168のシリンダ部の内部空間とソレノイドバルブ201の外部空間とが大気開放口を介して連通される。これにより、図19(A)中に白抜き矢印で示されるように、スライド部材166及びエアシリンダ168のピストン部が、圧縮ばね192の弾性力により−Y側に押圧され、シリンダ部内部の空気がソレノイドバルブ201の大気開放口から外部に排出される。スライド部材166は、運動変換部164の筐体164aの内部に設けられたストッパ部材(不図示)にスライド部材166が当接する第2の移動限界位置で停止する。スライド部材166及びエアシリンダ168のピストン部の−Y側への移動により、保持ユニット72は、図19(A)に示される、前述の離間位置から軸部731、732を回転軸として図19(A)中の黒矢印で示されるように紙面内時計回りに90度回転し、図19(B)に示される、ウエハWを保持部74のウエハ支持部74bが支持する位置(すなわち、前述の支持位置)に位置決めされる。すなわち、スライド部材166の第2の移動限界位置は、保持ユニット72の支持位置に対応する。
このように、ウエハ支持ユニット125dでは、エアシリンダ168、運動変換部164、及び圧縮ばね192によって、保持ユニット72が、図19(A)に示される離間位置と、図19(B)に示される支持位置との間で、回転駆動される。
さらに、ウエハ支持ユニット125dでは、図20に示されるように、軸受部材661、662には、ヒータ300が設けられている。軸受部材661と軸部731との間、及び軸受部材662と軸部732との間には、それぞれ静圧空気軸受(エアベアリング)が形成されるため、気体供給装置102及び気体供給装置106からそれぞれ供給され、多孔質部材82、85から軸部731、732に向かってそれぞれ噴き出された圧縮空気が、断熱膨張することで軸部731、732及び軸部731、732に接続された保持部74(すなわち保持ユニット72)の温度を低下させる場合がある。本実施形態では、ヒータ300によって、軸部731、732をそれぞれ加熱することで温度を調節し、保持部74の温度が、例えば、所定の許容値を超えて低下するのを防止することができる。なお、保持部74の温度を調整する機構は、ヒータに限定されるものではない。また、本実施形態では保持部74の温度低下に対してヒータで加熱するように構成したが、保持部74の温度が上昇してしまう場合には、ペルチェ素子などの冷却装置で保持部を冷却するようにしてもよい。
なお、ウエハ支持ユニット125dでは、保持ユニット72の回転駆動部を、上述のようにして構成した関係から、前述したウエハ支持ユニット125とは異なり、磁石61及び磁性体76は、設けられていない。
なお、ウエハ支持ユニット125dのその他の構成は、ウエハ支持ユニット125と同様になっている。
上述したコンプレッサ202の作動及び停止、並びに3つのソレノイドバルブ201のオン状態とオフ状態との切り換え設定は、主制御装置50によって行われる(図21参照)。
このようにして構成された本第4の実施形態に係る露光装置では、前述した第1の実施形態と同等の効果を得ることができる他、3つのウエハ支持ユニット125dでは、エアシリンダ168が力を発生しない状態でウエハの支持状態を維持することができる。また、保持ユニット72の温度が許容値を超えて低下するのを防止することができる。
なお、構成が相互に矛盾しない限りにおいて、上で説明した第1、第2、第3及び第4の各実施形態、第2実施形態の変形例(以下、上記各実施形態という)を任意に組み合わせて採用しても良い。
また、上記各実施形態では、ウエハ支持部74bに反射鏡79を設けたが、これに限らず、導光板を設けても良い。この場合、落射照明方式の計測系123に替えて、例えば水平面に平行な方向に測定光を照射する計測系を採用することができる。また、ウエハ支持部74bは、真空吸着に限らず、静電吸着によってウエハを保持しても良いし、摩擦力を利用してウエハを保持しても良い。
また、上記各実施形態では、露光装置が、液体(水)を介さずにウエハWの露光を行うドライタイプの露光装置である場合について説明したが、これに限らず、光学系と液体とを介してウエハの露光を行う液浸型の露光装置に上記各実施形態を適用しても勿論良い。
また、上記各実施形態では、投影光学系の近傍にアライメント検出系ALG及び多点AF系が設けられる場合について説明したが、これに限らず、例えば投影光学系が設けられる露光ステーションとアライメント検出系ALG及び多点AF系が設けられる計測ステーションとを離間させて、計測ステーション内又はその近傍に上記各実施形態に係る搬入ユニットを設けても良い。この場合、例えば米国特許出願公開第2008/0088843号明細書などに開示されるように、ウエハステージの他に、各種計測部材が設けられた計測ステージを備え、ウエハステージと計測ステージとの間で液浸領域の受け渡しを行うことしても良い。この場合において、計測ステージに代えて、ウエハステージをもう1つ設けても良い。このようにすると、一方のウエハステージ上のウエハに対する露光処理と、他方のウエハステージを用いたアライメント計測等の所定の計測処理との並行処理が可能となる。ウエハステージと計測ステージ、又は2つのウエハステージを備える露光装置は、ドライタイプの露光装置であっても良い。
なお、上記各実施形態では、露光装置が、スキャニング・ステッパである場合について説明したが、これに限らず、ステッパなどの静止型露光装置に上記実施形態を適用しても良い。また、ショット領域とショット領域とを合成するステップ・アンド・スティッチ方式の縮小投影露光装置にも上記各実施形態は適用することができる。
また、上記各実施形態の投影露光装置の投影光学系は縮小系のみならず等倍及び拡大系のいずれでも良いし、投影光学系は屈折系のみならず、反射系及び反射屈折系のいずれでも良いし、この投影像は倒立像及び正立像のいずれでも良い。
また、照明光ILは、ArFエキシマレーザ光(波長193nm)に限らず、KrFエキシマレーザ光(波長248nm)などの紫外光や、F2レーザ光(波長157nm)などの真空紫外光であっても良い。例えば米国特許第7,023,610号明細書に開示されているように、真空紫外光としてDFB半導体レーザ又はファイバーレーザから発振される赤外域、又は可視域の単一波長レーザ光を、例えばエルビウム(又はエルビウムとイッテルビウムの両方)がドープされたファイバーアンプで増幅し、非線形光学結晶を用いて紫外光に波長変換した高調波を用いても良い。
また、上記各実施形態では、露光装置の照明光ILとしては波長100nm以上の光に限らず、波長100nm未満の光を用いても良いことはいうまでもない。例えば、軟X線領域(例えば5〜15nmの波長域)のEUV(Extreme Ultraviolet)光を用いるEUV露光装置にも上記実施形態を適用することができる。その他、電子線又はイオンビームなどの荷電粒子線を用いる露光装置にも、上記各実施形態は適用できる。
また、上記各実施形態においては、光透過性の基板上に所定の遮光パターン(又は位相パターン・減光パターン)を形成した光透過型マスク(レチクル)を用いたが、このレチクルに代えて、例えば米国特許第6,778,257号明細書に開示されているように、露光すべきパターンの電子データに基づいて、透過パターン又は反射パターン、あるいは発光パターンを形成する電子マスク(可変成形マスク、アクティブマスク、あるいはイメージジェネレータとも呼ばれ、例えば非発光型画像表示素子(空間光変調器)の一種であるDMD(Digital Micro-mirror Device)などを含む)を用いても良い。
また、例えば国際公開第2001/035168号に開示されているように、干渉縞をウエハW上に形成することによって、ウエハW上にライン・アンド・スペースパターンを形成する露光装置(リソグラフィシステム)にも上記各実施形態を適用することができる。
さらに、例えば米国特許第6,611,316号明細書に開示されているように、2つのレチクルパターンを、投影光学系を介してウエハ上で合成し、1回のスキャン露光によってウエハ上の1つのショット領域をほぼ同時に二重露光する露光装置にも上記各実施形態を適用することができる。
なお、上記各実施形態でパターンを形成すべき物体(エネルギビームが照射される露光対象の物体)はウエハに限られるものでなく、ガラスプレート、セラミック基板、フィルム部材、あるいはマスクブランクスなど他の物体でも良い。
露光装置の用途としては半導体製造用の露光装置に限定されることなく、例えば、角型のガラスプレートに液晶表示素子パターンを転写する液晶用の露光装置や、有機EL、薄膜磁気ヘッド、撮像素子(CCD等)、マイクロマシン及びDNAチップなどを製造するための露光装置にも広く適用できる。また、半導体素子などのマイクロデバイスだけでなく、光露光装置、EUV露光装置、X線露光装置、及び電子線露光装置などで使用されるレチクル又はマスクを製造するために、ガラス基板又はシリコンウエハなどに回路パターンを転写する露光装置にも上記各実施形態を適用できる。
半導体素子などの電子デバイスは、デバイスの機能・性能設計を行うステップ、この設計ステップに基づいたレチクルを製作するステップ、シリコン材料からウエハを製作するステップ、前述した各実施形態に係る露光装置(パターン形成装置)及びその露光方法によりマスク(レチクル)のパターンをウエハに転写するリソグラフィステップ、露光されたウエハを現像する現像ステップ、レジストが残存している部分以外の部分の露出部材をエッチングにより取り去るエッチングステップ、エッチングが済んで不要となったレジストを取り除くレジスト除去ステップ、デバイス組み立てステップ(ダイシング工程、ボンディング工程、パッケージ工程を含む)、検査ステップ等を経て製造される。この場合、リソグラフィステップで、上記各実施形態の露光装置を用いて前述の露光方法が実行され、ウエハ上にデバイスパターンが形成されるので、高集積度のデバイスを生産性良く製造することができる。