JP6465294B2 - 駆動回路、振動デバイス、電子機器及び移動体 - Google Patents
駆動回路、振動デバイス、電子機器及び移動体 Download PDFInfo
- Publication number
- JP6465294B2 JP6465294B2 JP2015053143A JP2015053143A JP6465294B2 JP 6465294 B2 JP6465294 B2 JP 6465294B2 JP 2015053143 A JP2015053143 A JP 2015053143A JP 2015053143 A JP2015053143 A JP 2015053143A JP 6465294 B2 JP6465294 B2 JP 6465294B2
- Authority
- JP
- Japan
- Prior art keywords
- circuit
- node
- signal
- oscillation
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/02—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy
- B06B1/0207—Driving circuits
- B06B1/0223—Driving circuits for generating signals continuous in time
- B06B1/0238—Driving circuits for generating signals continuous in time of a single frequency, e.g. a sine-wave
- B06B1/0246—Driving circuits for generating signals continuous in time of a single frequency, e.g. a sine-wave with a feedback signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5705—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis
- G01C19/5712—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using masses driven in reciprocating rotary motion about an axis the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/097—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by vibratory elements
Description
本適用例に係る駆動回路は、振動子に接続されることで帰還発振回路を構成し、かつ、ハイパスフィルターを備えている帰還発振用回路と、周期信号を出力する第3ノードを備えている発振回路と、前記帰還発振回路が動作している状態で前記帰還発振用回路に前記周期信号を供給するか否かを制御し、かつ、前記帰還発振用回路に前記周期信号を供給する時に前記ハイパスフィルターの出力ノードである第1ノードと接地されている第2ノードとの間を非導通の状態にし、前記帰還発振用回路に前記周期信号を供給しない時に前記第1ノードと前記第2ノードとの間を導通の状態にするように制御する制御回路と、を含む。
上記適用例に係る駆動回路において、前記ハイパスフィルターは、コンデンサーと抵抗を含み、前記制御回路は、前記抵抗と前記第2ノードとの間にあって、前記第1ノードと前記第2ノードとの間を非導通の状態または前記抵抗を介して導通の状態にする第1スイッチ回路を含んでもよい。
上記適用例に係る駆動回路において、前記ハイパスフィルターは、コンデンサーと第1抵抗を含み、前記制御回路は、前記第1ノードと前記第1抵抗との間にあって、前記第1ノードと前記第2ノードとの間を非導通の状態または前記第1抵抗を介して導通の状態にする第1スイッチ回路と、前記第3ノードと前記第1ノードとの間にある第2抵抗と、を含んでもよい。
上記適用例に係る駆動回路において、前記制御回路は、前記第3ノードと前記第1ノードとの間にあって、前記帰還発振用回路に前記周期信号が供給される状態又は供給されない状態にする第2スイッチ回路を含んでもよい。
上記適用例に係る駆動回路において、前記制御回路は、前記帰還発振回路の発振状態に基づいて、前記帰還発振用回路に前記周期信号を供給するか否かを制御し、かつ、前記第
1ノードと前記第2ノードとの間を非導通の状態または導通の状態にするように制御する発振監視回路を含んでもよい。
上記適用例に係る駆動回路において、前記制御回路は、前記帰還発振回路から供給される信号を整流する整流回路を含み、前記発振監視回路は、前記整流回路の出力信号に基づいて、前記帰還発振用回路に前記周期信号を供給するか否かを制御し、かつ、前記第1ノードと前記第2ノードとの間を非導通の状態または導通の状態にするように制御してもよい。
本適用例に係る振動デバイスは、上記のいずれかの駆動回路と、前記振動子と、を備えている。
本適用例に係る電子機器は、上記のいずれかの駆動回路を備えている。
本適用例に係る移動体は、上記のいずれかの駆動回路を備えている。
以下では、物理量として角速度を検出する物理量検出装置(角速度検出装置)を例にとり説明する。
図1は、本実施形態の物理量検出装置(角速度検出装置)の機能ブロック図である。本実施形態の物理量検出装置1は、振動子(センサー素子)100と信号処理集積回路(IC:Integrated Circuit)2を含んで構成されている。
近と離間を繰り返す屈曲振動(励振振動)をする。
る。また、駆動回路20は、駆動信号と位相が同じ検波信号SDETを生成し、検出回路30に出力する。また、駆動回路20は、検波信号SDETをマスタークロック信号MCLKとしてデジタル演算回路40に供給する。
次に、検出回路30について説明する。図5は、検出回路30の構成例を示す図である。図5に示すように、本実施形態の検出回路30は、チャージアンプ31,32、差動アンプ33、ハイパスフィルター(HPF)34、ACアンプ35、同期検波回路36、可変ゲインアンプ37、スイッチトキャパシタフィルター(SCF)38、出力バッファー39を含んで構成されている。なお、本実施形態の検出回路30は、これらの要素の一部
を省略又は変更し、あるいは他の要素を追加した構成としてもよい。
次に、デジタル演算回路40について説明する。図6は、デジタル演算回路40の構成例を示す図である。図6に示すように、本実施形態のデジタル演算回路40は、A/D変換回路41、デジタルフィルター42、デジタル補正回路43及び分周回路44を含んで構成されている。なお、本実施形態のデジタル演算回路40は、これらの要素の一部を省略又は変更し、あるいは他の要素を追加した構成としてもよい。
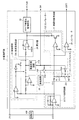
次に、駆動回路20について説明する。図7は、駆動回路20の構成例を示す図である。図7に示すように、本実施形態の駆動回路20は、帰還発振用回路21、発振回路22、制御回路23、積分器24、コンパレーター25及びAGC下限監視回路26を含んで構成されている。なお、本実施形態の駆動回路20は、これらの要素の一部を省略又は変更し、あるいは他の要素を追加した構成としてもよい。
ノードN1と接地ノードN2との間を非導通の状態にするとともに、スイッチ232がオンして、ハイパスフィルター211の抵抗R1を介して出力ノードN1に発振回路22が出力する周期信号(発振信号)が供給される状態にする。
図7〜図9のように構成されたいずれの駆動回路20でも、その起動開始時(信号処理IC2の電源投入時等)には、帰還発振回路の発振振幅(振動子100の発振振幅)が基準値よりも小さいので監視信号SWはハイレベルとなり、スイッチ232がオンしてハイパスフィルター211の出力ノードN1に発振回路22の出力信号(発振信号)が供給される。ハイパスフィルター211の出力ノードN1に供給された発振信号は、コンパレーター212によって増幅されて駆動信号となり、DS端子を介して振動子100に供給される。この時、スイッチ231はオフするので、ハイパスフィルター211の出力ノードN1と接地ノードN2との間は非導通であり、ハイパスフィルター211の出力ノードN1に供給された発振信号の一部が接地ノードN2に流れることがない。従って、本実施形態の物理量検出装置1(駆動回路20)によれば、発振回路22が出力する発振信号を効率的に利用し、振動子100の所望の共振周波数での発振動作を開始するまでの時間を短縮することができるので、振動子100が安定して発振するまでの起動時間を従来よりも短くすることができる。
図10は、本実施形態の電子機器の構成の一例を示す機能ブロック図である。また、図11は、本実施形態の電子機器の一例であるスマートフォンの外観の一例を示す図である。
Unit)320、操作部330、ROM(Read Only Memory)340、RAM(Random Access Memory)350、通信部360、表示部370を含んで構成されている。なお、本実施形態の電子機器は、図17の構成要素(各部)の一部を省略又は変更し、あるいは、他の構成要素を付加した構成としてもよい。
信号を送信する処理等を行う。
図12は、本実施形態の移動体の一例を示す図(上面図)である。図12に示す移動体400は、物理量検出装置410,420,430、コントローラー440,450,460、バッテリー470、ナビゲーション装置480を含んで構成されている。なお、本実施形態の移動体は、図12の構成要素(各部)の一部を省略し、あるいは、他の構成要素を付加した構成としてもよい。
,430が出力する物理量信号の一部又は全部を用いて、姿勢制御システム、横転防止システム、ブレーキシステム等の各種の制御を行う。
えば、各実施形態および各変形例を適宜組み合わせることも可能である。
Claims (9)
- 振動子に接続されることで帰還発振回路を構成し、かつ、ハイパスフィルターを備えている帰還発振用回路と、
周期信号を出力する第3ノードを備えている発振回路と、
前記帰還発振回路が動作している状態で前記帰還発振用回路に前記周期信号を供給するか否かを制御し、かつ、前記帰還発振用回路に前記周期信号を供給する時に前記ハイパスフィルターの出力ノードである第1ノードと接地されている第2ノードとの間を非導通の状態にし、前記帰還発振用回路に前記周期信号を供給しない時に前記第1ノードと前記第2ノードとの間を導通の状態にするように制御する制御回路と、を含む、駆動回路。 - 前記ハイパスフィルターは、コンデンサーと抵抗を含み、
前記制御回路は、
前記抵抗と前記第2ノードとの間にあって、前記第1ノードと前記第2ノードとの間を非導通の状態または前記抵抗を介して導通の状態にする第1スイッチ回路を含む、請求項1に記載の駆動回路。 - 前記ハイパスフィルターは、コンデンサーと第1抵抗を含み、
前記制御回路は、
前記第1ノードと前記第1抵抗との間にあって、前記第1ノードと前記第2ノードとの間を非導通の状態または前記第1抵抗を介して導通の状態にする第1スイッチ回路と、
前記第3ノードと前記第1ノードとの間にある第2抵抗と、を含む、請求項1に記載の駆動回路。 - 前記制御回路は、
前記第3ノードと前記第1ノードとの間にあって、前記帰還発振用回路に前記周期信号が供給される状態又は供給されない状態にする第2スイッチ回路を含む、請求項1乃至3のいずれか一項に記載の駆動回路。 - 前記制御回路は、
前記帰還発振回路の発振状態に基づいて、前記帰還発振用回路に前記周期信号を供給するか否かを制御し、かつ、前記第1ノードと前記第2ノードとの間を非導通の状態または導通の状態にするように制御する発振監視回路を含む、請求項1乃至4のいずれか一項に記載の駆動回路。 - 前記制御回路は、
前記帰還発振回路から供給される信号を整流する整流回路を含み、
前記発振監視回路は、
前記整流回路の出力信号に基づいて、前記帰還発振用回路に前記周期信号を供給するか否かを制御し、かつ、前記第1ノードと前記第2ノードとの間を非導通の状態または導通の状態にするように制御する、請求項5に記載の駆動回路。 - 請求項1乃至6のいずれか一項に記載の駆動回路と、
前記振動子と、を備えている、振動デバイス。 - 請求項1乃至6のいずれか一項に記載の駆動回路を備えている、電子機器。
- 請求項1乃至6のいずれか一項に記載の駆動回路を備えている、移動体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015053143A JP6465294B2 (ja) | 2015-03-17 | 2015-03-17 | 駆動回路、振動デバイス、電子機器及び移動体 |
| US15/070,403 US9987662B2 (en) | 2015-03-17 | 2016-03-15 | Drive circuit, vibrator device, electronic apparatus, and moving object |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015053143A JP6465294B2 (ja) | 2015-03-17 | 2015-03-17 | 駆動回路、振動デバイス、電子機器及び移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016173292A JP2016173292A (ja) | 2016-09-29 |
| JP6465294B2 true JP6465294B2 (ja) | 2019-02-06 |
Family
ID=56924398
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015053143A Active JP6465294B2 (ja) | 2015-03-17 | 2015-03-17 | 駆動回路、振動デバイス、電子機器及び移動体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9987662B2 (ja) |
| JP (1) | JP6465294B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6828544B2 (ja) * | 2017-03-23 | 2021-02-10 | セイコーエプソン株式会社 | センサー素子制御装置、物理量センサー、電子機器、移動体及び物理量センサーの故障診断方法 |
| CN112213060B (zh) * | 2020-09-25 | 2022-11-04 | 中国直升机设计研究所 | 一种旋翼气弹稳定性试验旋翼整体振型激振方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5596311A (en) * | 1995-05-23 | 1997-01-21 | Preco, Inc. | Method and apparatus for driving a self-resonant acoustic transducer |
| JP4449262B2 (ja) | 2001-07-09 | 2010-04-14 | セイコーエプソン株式会社 | 振動子を用いた測定方法、測定装置および振動子の駆動装置 |
| JP4882975B2 (ja) * | 2006-11-27 | 2012-02-22 | セイコーエプソン株式会社 | 駆動装置、物理量測定装置及び電子機器 |
| JP2010261900A (ja) | 2009-05-11 | 2010-11-18 | Renesas Electronics Corp | 半導体装置 |
| EP2336717B1 (en) * | 2009-12-21 | 2012-09-19 | STMicroelectronics Srl | Microelectromechanical device having an oscillating mass, and method for controlling a microelectromechanical device having an oscillating mass |
| JP5752441B2 (ja) * | 2011-02-25 | 2015-07-22 | セイコーエプソン株式会社 | 駆動回路、物理量検出装置、角速度検出装置、集積回路装置及び電子機器 |
| JP2012220310A (ja) * | 2011-04-07 | 2012-11-12 | Seiko Epson Corp | 駆動回路、集積回路装置及びセンサー装置 |
| US9238249B2 (en) * | 2012-08-21 | 2016-01-19 | Texas Instruments Incorporated | Ultrasound transmitter |
-
2015
- 2015-03-17 JP JP2015053143A patent/JP6465294B2/ja active Active
-
2016
- 2016-03-15 US US15/070,403 patent/US9987662B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9987662B2 (en) | 2018-06-05 |
| US20160271649A1 (en) | 2016-09-22 |
| JP2016173292A (ja) | 2016-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6222426B2 (ja) | 物理量検出回路、物理量検出装置、電子機器及び移動体 | |
| US10302431B2 (en) | Physical quantity detection circuit, electronic device, and moving object | |
| JP6834581B2 (ja) | 物理量センサー、電子機器及び移動体 | |
| CN104122411B (zh) | 物理量检测电路、物理量检测装置、电子设备以及移动体 | |
| JP2018159630A (ja) | センサー素子制御装置、物理量センサー、電子機器、移動体及び物理量センサーの故障診断方法 | |
| CN108291932B (zh) | 诊断电路、电子电路、电子设备以及移动体 | |
| JP2021185356A (ja) | 物理量検出回路、物理量検出装置、電子機器及び移動体 | |
| JP6465294B2 (ja) | 駆動回路、振動デバイス、電子機器及び移動体 | |
| JP2023105141A (ja) | 物理量検出回路、物理量センサー、電子機器、及び移動体物理量センサー | |
| JP6222423B2 (ja) | 物理量センサー、電子機器及び移動体 | |
| JP7456284B2 (ja) | 物理量検出回路、物理量検出装置、電子機器及び移動体 | |
| JP2017092684A (ja) | 複合スイッチ回路、物理量検出装置、電子機器および移動体 | |
| JP6521236B2 (ja) | 物理量処理回路、物理量処理装置、電子機器及び移動体 | |
| JP6478034B2 (ja) | 角速度検出装置の評価方法、信号処理回路、角速度検出装置、電子機器及び移動体 | |
| JP7322718B2 (ja) | 物理量検出回路、物理量センサー、電子機器、移動体及び物理量検出回路の動作方法 | |
| CN108351210B (zh) | 物理量检测装置、电子设备以及移动体 | |
| JP6508460B2 (ja) | 物理量検出用回路、物理量検出装置、電子機器及び移動体 | |
| JP2017090209A (ja) | 物理量検出回路、電子機器および移動体 | |
| JP6756175B2 (ja) | 整流回路、駆動回路、物理量検出装置、電子機器及び移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181225 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6465294 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |