JP6444129B2 - 記録装置および記録方法 - Google Patents
記録装置および記録方法 Download PDFInfo
- Publication number
- JP6444129B2 JP6444129B2 JP2014209954A JP2014209954A JP6444129B2 JP 6444129 B2 JP6444129 B2 JP 6444129B2 JP 2014209954 A JP2014209954 A JP 2014209954A JP 2014209954 A JP2014209954 A JP 2014209954A JP 6444129 B2 JP6444129 B2 JP 6444129B2
- Authority
- JP
- Japan
- Prior art keywords
- recording
- image
- recording medium
- recorded
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Landscapes
- Ink Jet (AREA)
- Controlling Sheets Or Webs (AREA)
Description
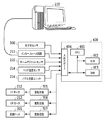
図1(a)は、本実施形態におけるインクジェット記録装置の構成の説明図である。
V=a−(x1−x2) ・・・・ (1)
この傾き量Vは、記録媒体Sの搬送ずれGによって生じる誤差を考慮しているため、調整パターンPのみから得られる傾き量aよりも正確である。
本実施形態においては、記録媒体の搬送方向における位置が異なる複数の記録ヘッドを用いる場合に、それらの記録ヘッド間の記録位置を調整する。
Vp=Vm−(x1−x2) ・・・・ (2)
このずれ量Vpには、記録媒体Sの搬送ずれGによって生じる誤差が含まれないため、調整パターンPから得られる調整量Vmよりも正確に、記録ヘッド901,902間の記録位置のずれ量を示している。このように、記録媒体Sの端部SAの位置を検出して記録媒体Sの主走査方向の搬送ずれGを算出し、その搬送ずれGを調整パターンPから得られるずれ量Vmに反映することによって、2つの記録ヘッド間の記録位置のずれ量Vpをより正確に求めることができる。したがって、その正確な記録位置のずれ量Vpに対応する調整値によって、2つ記録ヘッドの記録タイミング(インクの吐出タイミング)を調整することにより、それらの記録位置を一致させることができる。
第1および第2の実施形態においては、調整パターンPの記録時に、記録媒体Sの搬送ずれを考慮することによって記録位置の正確な調整値を取得する。しかし、記録位置の正確な調整値が取得できたとしても、所望の画像(実画像)を実際に記録するときに(実際の記録動作時)、記録位置の調整値の取得時とは異なる記録媒体の搬送ずれが生じた場合には、画質の劣化を招く。本実施形態は、このような場合において、実際の記録動作時に生じる記録媒体の搬送ずれに応じて、記録位置の調整値を補正する。
Vp2=Vp1−(x1−x2) ・・・・ (3)
この調整値Vp2を用いて、記録ヘッド902の記録位置を調整することにより、記録ヘッド901による実画像の記録後に記録媒体Sの搬送ずれが生じたとしても、それらの記録ヘッド901.902間の記録位置を一致させることができる。
第3の実施形態3においては、通常の実画像の記録時に、2つの記録ヘッド間の記録位置の調整値を記録走査毎に補正する。本実施形態では、1つの記録ヘッドによる記録位置の調整値を記録走査毎に補正する。
Xn=Xs−(x1−x2) ・・・・ (4)
3回目の記録走査(第3の記録走査)においては、記録媒体Sの左端部SAの位置を検出し、その左端部SAの位置と、第2の記録走査時における左端部SAの位置と、を比較し、上式4を用いて3回目の記録走査時における記録開始位置を算出する。4回目の記録走査(第3の記録走査)においても同様である。上式(4)における補正対象の記録開始位置Xsは、先に記録走査時において用いた補正後の記録開始位置となるため、上式(4)は漸化式である。記録媒体の左端部の位置を検出し、その記録媒体が搬送された際の主走査方向の搬送ずれG1を算出して、記録開始位置を補正することにより、異なる記録走査間における記録位置のずれを小さく抑えることができる。
記録媒体の搬送ずれの取得方法は、前述した実施形態のように、記録媒体の左端部の位置の検出結果を用いる手法のみに限定されず、記録媒体の搬送ずれを取得できれば他の手法を用いてもよい。例えば、搬送方向に複数の濃度センサを設置し、記録媒体に記録したパターンに関して、記録媒体の搬送の前後における主走査方向の位置を検出することによって、搬送ずれを取得することも可能である。また、記録ヘッドの構成、および配備数、吐出口列の形成数、さらに、インク色の種類および数などは、上述した実施形態のみに限定されず任意である。例えば、上述した実施形態のようにブラック,シアン,マゼンタ,イエローの4色のインクを用いる形態の他、濃度の低い淡シアンおよび淡マゼンタのインク、あるいはレッドやグリーンなどの特色のインクを用いてもよい。また、上述した実施形態においては、記録ヘッドからインクを吐出することによって記録媒体に画像を記録するインクジェット記録装置に対して、本発明を適用した場合について説明した。しかし本発明は、記録ヘッドと記録媒体との相対移動を伴って画像を記録する種々の方式の記録装置に対して、広く適用可能である。例えば、記録ヘッドに備わる記録素子は、前述したように、吐出エネルギー発生素子を用いて吐出口からインクを吐出する構成のみに特定されず、記録媒体に画像を記録することができる構成であればよい。
500 光学センサ
P 調整パターン
PA 基準パターン
PB ずらしパターン
S 記録媒体
Claims (10)
- 記録ヘッドを第1の方向に移動させつつ、前記第1の方向と交差する方向に延在する記録素子列を成すように前記記録ヘッドに複数配備された記録素子によって記録媒体に画像を記録する記録走査と、前記記録媒体を前記第1の方向と交差する第2の方向に搬送する搬送動作と、を繰り返すことによって、前記記録媒体に画像を記録する記録装置であって、
前記記録走査によって記録した第1の画像と、前記第1の画像の記録後に前記記録媒体を前記第2の方向に所定量搬送してから前記記録走査によって記録した第2の画像と、の前記第1の方向のずれ量を取得する第1取得手段と、
前記所定量搬送によって前記記録媒体に生じる前記第1の方向のずれ量を取得する第2取得手段と、
前記第1取得手段によって取得した前記第1および第2の画像のずれ量と、前記第2取得手段によって取得した前記記録媒体のずれ量と、に基づいて、前記記録走査における画像の記録位置を補正する補正手段と、
を備えることを特徴とする記録装置。 - 前記第2取得手段は、前記第1の方向における前記記録媒体の端部の位置を光学的に検出するセンサを含むことを特徴とする請求項1に記載の記録装置。
- 前記第1および第2の画像は、複数組の調整パターンを形成するために重ねて記録される複数の第1および第2のパターンを含み、前記複数組の調整パターンは、前記第1の方向における前記第1のパターンと前記第2のパターンのずれ量が異なることを特徴とする請求項1または2に記載の記録装置。
- 前記第1のパターンは、前記記録素子列の中央よりも前記第2の方向の上流側に位置する記録素子によって記録され、
前記第2のパターンは、前記記録素子列の中央よりも前記第2の方向の下流側に位置する記録素子によって記録される
ことを特徴とする請求項3に記載の記録装置。 - 前記記録素子列は、前記第2の方向の上流側に位置する第1の記録素子列と、前記第2の方向の下流側に位置する第2の記録素子列と、を含み、
前記第1のパターンは前記第1の記録素子列によって記録され、
前記第2のパターンは前記第2の記録素子列によって記録される
ことを特徴とする請求項3に記載の記録装置。 - 前記補正手段は、前記所定量搬送の前の前記記録走査による画像の記録位置に対して、前記所定量搬送の後の前記記録走査による画像の記録位置を補正することを特徴とする請求項1から5のいずれか1項に記載の記録装置。
- 前記補正手段は、前記第1および第2の画像の記録位置の前記第1の方向のずれを光学的に検出するセンサを含むことを特徴とする請求項1から6のいずれか1項に記載の記録装置。
- 前記第2取得手段は、前記第1および第2の画像の記録位置の前記第1の方向のずれに関する情報が入力される入力部を含むことを特徴とする請求項1から6のいずれか1項に記載の記録装置。
- 前記記録素子は、吐出口からインクを吐出可能であることを特徴とする請求項1から8のいずれか1項に記載の記録装置。
- 記録ヘッドを第1の方向に移動させつつ、前記第1の方向と交差する方向に延在する記録素子列を成すように前記記録ヘッドに複数配備された記録素子によって記録媒体に画像を記録する記録走査と、前記記録媒体を前記第1の方向と交差する第2の方向に搬送する搬送動作と、を繰り返すことによって、前記記録媒体に画像を記録する記録方法であって、
前記記録走査によって記録した第1の画像と、前記第1の画像の記録後に前記記録媒体を前記第2の方向に所定量搬送してから前記記録走査によって記録した第2の画像と、の前記第1の方向のずれ量を取得する第1取得工程と、
前記所定量搬送によって前記記録媒体に生じる前記第1の方向のずれ量を取得する第2取得工程と、
前記第1取得工程によって取得した前記第1および第2の画像のずれ量と、前記第2取得工程によって取得した前記記録媒体のずれ量と、に基づいて、前記記録走査における画像の記録位置を補正する補正工程と、
を含むことを特徴とする記録方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014209954A JP6444129B2 (ja) | 2014-10-14 | 2014-10-14 | 記録装置および記録方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014209954A JP6444129B2 (ja) | 2014-10-14 | 2014-10-14 | 記録装置および記録方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016078279A JP2016078279A (ja) | 2016-05-16 |
| JP2016078279A5 JP2016078279A5 (ja) | 2017-11-09 |
| JP6444129B2 true JP6444129B2 (ja) | 2018-12-26 |
Family
ID=55957257
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014209954A Active JP6444129B2 (ja) | 2014-10-14 | 2014-10-14 | 記録装置および記録方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6444129B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6997526B2 (ja) * | 2017-03-30 | 2022-01-17 | 株式会社Screenホールディングス | インクジェット印刷装置の補正値取得方法及びインクジェット印刷装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002331648A (ja) * | 2001-05-09 | 2002-11-19 | Fuji Xerox Co Ltd | 画像記録装置 |
| JP2007268946A (ja) * | 2006-03-31 | 2007-10-18 | Canon Inc | インクジェット記録ヘッドの記録位置ずれ補正方法およびその機能を備えたインクジェット記録装置 |
| JP5171736B2 (ja) * | 2009-06-08 | 2013-03-27 | キヤノン株式会社 | 記録装置および記録位置調整方法 |
| US8104861B2 (en) * | 2009-09-29 | 2012-01-31 | Eastman Kodak Company | Color to color registration target |
-
2014
- 2014-10-14 JP JP2014209954A patent/JP6444129B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016078279A (ja) | 2016-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8424988B2 (en) | Recording apparatus and recording position adjustment method | |
| US8033630B2 (en) | Liquid ejecting method and liquid ejecting apparatus | |
| US8636334B2 (en) | Printing apparatus and adjustment pattern printing method | |
| US8628163B2 (en) | Ink jet printing apparatus and printing method | |
| US9358790B2 (en) | Printing apparatus and landing position determination method | |
| JP6021872B2 (ja) | 記録装置および記録位置調整方法 | |
| JP6061550B2 (ja) | 記録装置及びその制御方法 | |
| JP5656480B2 (ja) | 記録装置及びその記録位置調整方法 | |
| US7758139B2 (en) | Liquid ejecting apparatus and transport method | |
| JP2014061599A (ja) | 記録装置及びレジストレーション調整値の取得方法 | |
| JP5489424B2 (ja) | 記録装置および記録装置の記録位置を調整するための調整値取得方法 | |
| US20080079766A1 (en) | Correction value determining method, correction value determining apparatus, and storage medium having program stored thereon | |
| JP2022161140A (ja) | インクジェット記録装置および記録方法 | |
| JP5383267B2 (ja) | インクジェット記録装置、インクジェット記録装置の記録方法および記録方法 | |
| JP5748803B2 (ja) | 記録装置および記録位置調整方法 | |
| JP6319948B2 (ja) | 記録装置 | |
| JP6444129B2 (ja) | 記録装置および記録方法 | |
| JP5312122B2 (ja) | インクジェット記録装置 | |
| JP5603703B2 (ja) | 記録装置及びその記録位置調整方法 | |
| JP2005132066A (ja) | インク着弾位置調整方法及びインクジェットプリンタ | |
| JP2009039958A (ja) | 記録装置 | |
| JP4270799B2 (ja) | 画像記録装置 | |
| JP5733896B2 (ja) | インクジェット記録装置及び記録方法 | |
| JP7366590B2 (ja) | 記録装置および記録方法 | |
| JP5915166B2 (ja) | 印刷装置、及び、補正方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170926 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170926 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180710 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180724 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181030 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181127 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6444129 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |