JP6350923B2 - 変位検出装置および変位検出方法 - Google Patents
変位検出装置および変位検出方法 Download PDFInfo
- Publication number
- JP6350923B2 JP6350923B2 JP2016220944A JP2016220944A JP6350923B2 JP 6350923 B2 JP6350923 B2 JP 6350923B2 JP 2016220944 A JP2016220944 A JP 2016220944A JP 2016220944 A JP2016220944 A JP 2016220944A JP 6350923 B2 JP6350923 B2 JP 6350923B2
- Authority
- JP
- Japan
- Prior art keywords
- displacement
- unit
- extraction
- detection
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Image Analysis (AREA)
Description
以下、図1〜9を用いて、実施の形態を説明する。
[1−1−1.対象物の撮像]
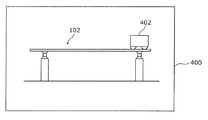
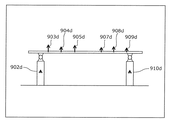
図1は、実施の形態における変位検出システム1の一構成例を示す外観図である。変位検出システム1は、撮像装置101と変位検出装置200で構成される。撮像装置101は対象物102を所定期間に複数回撮像する。撮像装置101は、例えば、所定の時間間隔で対象物102を撮像する。撮像装置101が撮像した複数の撮像画像は変位検出装置200に入力される。変位検出装置200は、入力された複数の撮像画像から対象物102全体の変位を示す全体変位を算出する。本実施の形態では、撮像装置101がカメラ、対象物102が橋梁である場合を例として説明を行う。
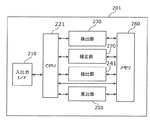
図2は、実施の形態における変位検出装置200の一構成例を示すブロック図である。図2に示すように、変位検出装置200は、入出力I/F210、CPU220、検出部230、抽出部240、算出部250及びメモリ260を備える。
カメラ101が撮像した複数の撮像画像において、橋梁102が同じ位置に撮像されるとは限らない。このような場合、検出部230が検出した変位に誤差が生じる。それを解消するために、変位検出装置に検出部230が検出した変位を補正する機能を備えてもよい。
[1−2−1.補正をしない場合の動作]
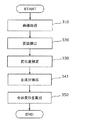
図4は、実施の形態における変位検出装置200の動作を示すフローチャートである。
CPU220は、撮像画像を取得する。CPU220は、入出力I/F210を介して、カメラ101が橋梁102を所定期間撮像した撮像画像を取得してメモリ260に格納させる。
CPU220は、検出部230に橋梁102上に設定された複数の計測点における時間的な変位を検出させる。検出部230は、メモリ260が記憶している複数の撮像画像を撮像時刻順に取出し、撮像画像毎に橋梁102の変位を検出する。検出部230は、検出した変位をメモリ260に記憶させる(検出ステップ)。
CPU220は、抽出部240に、検出部230が検出した複数の計測点における変位に対して、空間的な主成分を抽出させる。抽出部240は、メモリ260が記憶している複数の計測点における変位を読み出し、空間的な主成分を抽出する。抽出部240は、抽出した主成分をメモリ260に記憶させる(主成分抽出ステップ)。
CPU220は、算出部250に、抽出部240が抽出した主成分を用いて、橋梁102の全体変位を算出させる。算出部250は、メモリ260が記憶している主成分を読み出し、橋梁102の全体変位を算出し、メモリ260に記憶させる。CPU220は、メモリ260が記憶している全体変位を入出力I/F210を介して、出力する(算出ステップ)。
図5は、実施の形態における変位検出装置の他の動作を示すフローチャートである。図5は、変位検出装置201の動作を示す。
CPU220は、補正部270に、検出部230が検出した複数の計測点における変位を補正させる。補正部270は、メモリ260が記憶している複数の計測点における時間的な変位を読み出し、複数の撮像画像に含まれる構造物を基準にして、各変位を補正する。補正部270は、補正した変位をメモリ260に記憶させる。
CPU220は、抽出部241に、補正部270が補正した複数の計測点における変位に対して、空間的な主成分を抽出させる。抽出部241は、メモリ260が記憶している複数の計測点における変位を読み出し、空間的な主成分を抽出する。抽出部241は、抽出した主成分をメモリ260に記憶させる。
ここでは、変位検出装置201の動作例を説明する。
Di(x,y,t)=Pi(x,y,t)−Pi(x,y,t−1)
Di(x,y,t)=Pi(x,y,t)−Pi(x,y,0)
ここで、Pi(x、y、0)は、基準撮像画像における位置座標である。
ここでは、例えば、mは5であり、抽出部241は、固有値の大きい順において上位5つの主成分をメモリに記憶させるとして説明する。
以上のように、本実施の形態の変化量検出装置において、検出部230は、橋梁102を所定期間撮像した複数の撮像画像において、橋梁102上に設定された複数の計測点における時間的な変化量を検出し、抽出部240は複数の計測点における時間的な変化量に対して、空間的な主成分を抽出し、算出部250は抽出した主成分から橋梁102の全体の変化量を算出する。
以上のように、本出願において開示する技術の例示として、実施の形態を説明した。しかしながら、本開示における技術は、これに限定されず、変更、置き換え、付加、省略などを行った実施の形態にも適用できる。また、上記実施の形態で説明した各構成要素を組み合わせて、新たな実施の形態とすることも可能である。
101 撮像装置(カメラ)
102 対象物(橋梁)
200、201 変位検出装置
210 入出力I/F
220、221 CPU
230 検出部
240、241 抽出部
250 算出部
260 メモリ
270 補正部
Claims (13)
- 複数の時刻において対象物が撮像された複数の撮像画像を用いて、当該対象物に設定された複数の計測点それぞれについて、時間経過に伴う空間的な変位を検出する検出部と、
前記検出部によって検出された変位から、前記対象物に特徴的な変位を示す特徴的変位を抽出する抽出部と、
前記抽出部によって抽出された特徴的変位から、前記対象物全体の変位を示す全体変位を算出する算出部とを備え、
前記抽出部は、前記検出部によって検出された変位に対して、主成分分析を行って主成分を抽出することで、前記抽出を行う
変位検出装置。 - 前記算出部は、前記抽出部によって抽出された主成分のうち、固有値が大きい順における最下位側の1以上の主成分を除く主成分を合成することで、前記算出を行う
請求項1に記載の変位検出装置。 - 前記算出部は、前記算出の対象となる各主成分に対して、当該主成分の時間的強度変化を算出することで、前記算出を行う
請求項1又は2に記載の変位検出装置。 - 前記算出部は、前記算出の対象となる各主成分に対して、当該主成分の時間的強度変化の周波数特性を算出することで、前記算出を行う
請求項1又は2に記載の変位検出装置。 - さらに、前記検出部によって検出された、前記複数の計測点のうちの少なくとも1つ以上の基準計測点についての変位に基づいて、前記検出部によって検出された、前記複数の計測点についての変位を補正する補正部を備え、
前記抽出部は、前記補正部によって補正された変位を利用して、前記抽出を行う
請求項1〜4のいずれか1項に記載の変位検出装置。 - 前記検出部は、前記複数の撮像画像における変位を、前記変位として検出し、
さらに、前記検出部によって検出された、前記複数の計測点それぞれについての変位を、前記複数の計測点において実際に変位した距離の比率が反映されるようにスケール補正するスケーリング部を備え
前記算出部は、前記スケーリング部によってスケーリングされた変位を利用して、前記算出を行う
請求項1〜5のいずれか1項に記載の変位検出装置。 - 前記複数の撮像画像のそれぞれは、加速度を示す加速度画像であり、
前記検出部は、検出する変位が加速度を用いて表現されるように前記検出を行い、
前記抽出部は、抽出する特徴的変位が加速度を用いて表現されるように前記抽出を行う
請求項1〜6のいずれか1項に記載の変位検出装置。 - 前記複数の撮像画像のそれぞれは、速度を示す速度画像であり、
前記検出部は、検出する変位が速度を用いて表現されるように前記検出を行い、
前記抽出部は、抽出する特徴的変位が速度を用いて表現されるように前記抽出を行う
請求項1〜6のいずれか1項に記載の変位検出装置。 - 前記複数の撮像画像のそれぞれは、距離を示す距離画像であり、
前記検出部は、3次元空間における変位を、前記変位として検出する
請求項1〜6のいずれか1項に記載の変位検出装置。 - さらに、前記算出部によって算出された変位に基づく画像を、前記複数の撮像画像のうちの少なくとも1つに対して重畳させた重畳画像を生成する重畳画像生成部を備える
請求項1〜9のいずれか1項に記載の変位検出装置。 - 前記複数の撮像画像は、複数の撮像装置によって、前記対象物が同期撮像された画像を含む
請求項1〜10のいずれか1項に記載の変位検出装置。 - 検出部と抽出部と算出部とを備える変位検出装置が行う変位算出方法であって、
前記検出部が、複数の時刻において対象物が撮像された複数の撮像画像を用いて、当該対象物に設定された複数の計測点について、時間経過に伴う空間的な変位を検出する検出ステップと、
前記抽出部が、前記検出ステップによって検出された変化量から、前記対象物に特徴的な変位を示す特徴的変位を抽出する抽出ステップと、
前記算出部が、前記抽出ステップによって抽出された特徴的変位から、前記対象物全体の変位を示す全体変位を算出する算出ステップとを有し、
前記抽出ステップでは、前記検出ステップによって検出された変位に対して、主成分分析を行って主成分を抽出することで、前記抽出を行う
変位検出方法。 - 複数の時刻において対象物が撮像された複数の撮像画像を用いて、当該対象物に設定された複数の計測点それぞれについて、時間経過に伴う空間的な変位を検出する検出部と、
前記検出部によって検出された変位から、前記対象物に特徴的な変位を示す特徴的変位を抽出する抽出部と、
前記抽出部によって抽出された特徴的変位から、前記対象物全体の変位を示す全体変位を算出する算出部とを備え、
前記複数の撮像画像のそれぞれは、加速度を示す加速度画像であり、
前記検出部は、検出する変位が加速度を用いて表現されるように前記検出を行い、
前記抽出部は、抽出する特徴的変位が加速度を用いて表現されるように前記抽出を行う
変位検出装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/352,907 US10062176B2 (en) | 2016-02-24 | 2016-11-16 | Displacement detecting apparatus and displacement detecting method |
| JP2018099692A JP6970893B2 (ja) | 2016-02-24 | 2018-05-24 | 変位検出装置および変位検出方法 |
| US16/044,754 US10311591B2 (en) | 2016-02-24 | 2018-07-25 | Displacement detecting apparatus and displacement detecting method |
| US16/385,646 US10733751B2 (en) | 2016-02-24 | 2019-04-16 | Displacement detecting apparatus and displacement detecting method |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016032648 | 2016-02-24 | ||
| JP2016032648 | 2016-02-24 | ||
| JP2016105988 | 2016-05-27 | ||
| JP2016105988 | 2016-05-27 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018099692A Division JP6970893B2 (ja) | 2016-02-24 | 2018-05-24 | 変位検出装置および変位検出方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017215306A JP2017215306A (ja) | 2017-12-07 |
| JP2017215306A5 JP2017215306A5 (ja) | 2018-05-24 |
| JP6350923B2 true JP6350923B2 (ja) | 2018-07-04 |
Family
ID=60575534
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016220944A Active JP6350923B2 (ja) | 2016-02-24 | 2016-11-11 | 変位検出装置および変位検出方法 |
| JP2018099692A Active JP6970893B2 (ja) | 2016-02-24 | 2018-05-24 | 変位検出装置および変位検出方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018099692A Active JP6970893B2 (ja) | 2016-02-24 | 2018-05-24 | 変位検出装置および変位検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP6350923B2 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101966666B1 (ko) * | 2017-12-27 | 2019-04-09 | 부산대학교 산학협력단 | 교량의 내하력 평가 장치 및 방법 |
| WO2019181059A1 (ja) * | 2018-03-22 | 2019-09-26 | パナソニックIpマネジメント株式会社 | 軸重計測装置および軸重計測方法 |
| JP7249538B2 (ja) * | 2018-03-26 | 2023-03-31 | パナソニックIpマネジメント株式会社 | 計測装置及び計測方法 |
| JP6965806B2 (ja) * | 2018-03-29 | 2021-11-10 | トヨタ自動車株式会社 | 挙動測定装置 |
| JP7054641B2 (ja) * | 2018-03-30 | 2022-04-14 | 株式会社Nttドコモ | 構造物特性評価システム |
| JPWO2020039688A1 (ja) * | 2018-08-24 | 2021-08-26 | パナソニックIpマネジメント株式会社 | 符号化装置及び符号化方法 |
| JP2020060394A (ja) * | 2018-10-05 | 2020-04-16 | 株式会社Ihi | 非接触計測装置の計測範囲拡大方法 |
| CN112313472B (zh) * | 2018-10-29 | 2023-12-26 | 松下知识产权经营株式会社 | 信息提示方法、信息提示装置、以及信息提示系统 |
| CN112368540A (zh) * | 2018-10-29 | 2021-02-12 | 松下知识产权经营株式会社 | 点检装置及点检方法 |
| JP7235242B2 (ja) * | 2019-04-01 | 2023-03-08 | 学校法人五島育英会 | 監視システム及び監視方法 |
| KR102180872B1 (ko) * | 2019-05-17 | 2020-11-19 | 주식회사 누림 | 레이저와 광학 영상을 접목한 3차원 변위측정계 |
| CN114450552A (zh) * | 2019-10-10 | 2022-05-06 | 松下知识产权经营株式会社 | 校正参数计算方法、位移量计算方法、校正参数计算装置及位移量计算装置 |
| CN114502913A (zh) * | 2019-10-17 | 2022-05-13 | 松下知识产权经营株式会社 | 修正参数计算方法及装置、位移量计算方法及装置 |
| JP2021148622A (ja) * | 2020-03-19 | 2021-09-27 | 株式会社Nttドコモ | 構造物判定システム |
| CN116997821A (zh) * | 2021-03-17 | 2023-11-03 | 索尼半导体解决方案公司 | 感测系统 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4630137B2 (ja) * | 2005-06-24 | 2011-02-09 | 大成建設株式会社 | 対象物監視システム、対象物監視方法および対象物監視プログラム |
| JP4742270B2 (ja) * | 2006-10-16 | 2011-08-10 | 国立大学法人山口大学 | 変形特性を測定する方法及びそのための装置 |
| JP4958610B2 (ja) * | 2007-04-06 | 2012-06-20 | キヤノン株式会社 | 画像防振装置、撮像装置及び画像防振方法 |
| JP2010145231A (ja) * | 2008-12-18 | 2010-07-01 | Sumitomo Heavy Ind Ltd | 対象物の変位測定装置及び方法 |
| JP4948660B2 (ja) * | 2010-05-14 | 2012-06-06 | 西日本旅客鉄道株式会社 | 構造物変位量測定方法 |
| US8692880B2 (en) * | 2010-10-05 | 2014-04-08 | Mitutoyo Corporation | Image correlation displacement sensor |
| JP6323929B2 (ja) * | 2014-01-30 | 2018-05-16 | 国立大学法人 和歌山大学 | 計測装置及び橋梁検査方法 |
-
2016
- 2016-11-11 JP JP2016220944A patent/JP6350923B2/ja active Active
-
2018
- 2018-05-24 JP JP2018099692A patent/JP6970893B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP6970893B2 (ja) | 2021-11-24 |
| JP2017215306A (ja) | 2017-12-07 |
| JP2018138930A (ja) | 2018-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6350923B2 (ja) | 変位検出装置および変位検出方法 | |
| US10733751B2 (en) | Displacement detecting apparatus and displacement detecting method | |
| JP6507380B2 (ja) | 剛性測定装置および剛性測定方法 | |
| US11009436B2 (en) | Rigidity measurement apparatus and rigidity measurement method | |
| AU2016308995B2 (en) | Method, device, and program for measuring displacement and vibration of object by single camera | |
| EP3594618B1 (en) | Three-dimensional shape measurement device, three-dimensional shape measurement method, and program | |
| JP5384316B2 (ja) | 変位計測装置、変位計測方法、及び変位計測プログラム | |
| WO2020031950A1 (ja) | 計測校正装置、計測校正方法、及びプログラム | |
| JP5463584B2 (ja) | 変位計測方法、変位計測装置及び変位計測プログラム | |
| JP2018179577A (ja) | 位置計測装置 | |
| JP2020134242A (ja) | 計測方法、計測装置、およびプログラム | |
| JPWO2018158994A1 (ja) | 変位計測装置および変位計測方法 | |
| JP5727969B2 (ja) | 位置推定装置、方法、及びプログラム | |
| JP2011022084A (ja) | 三次元姿勢測定装置および三次元姿勢測定方法 | |
| JP5230354B2 (ja) | 位置特定装置及び異動建物検出装置 | |
| JP2012181063A (ja) | 計算装置、計算方法及び計算プログラム | |
| JP2017006468A (ja) | 放射線撮像装置および微分方向推定方法 | |
| US20230345142A1 (en) | Three-dimensional-measurement device and three-dimensional-measurement method | |
| WO2022091458A1 (ja) | 情報処理方法、情報処理装置および情報処理システム | |
| JP2012238163A (ja) | オプティカルフロー生成装置、生成方法、プログラム | |
| JP4674316B2 (ja) | 位置検出装置、位置検出方法及び位置検出プログラム | |
| JP2023082603A (ja) | 変位測定装置、画像補正装置、そのシステム、変位測定方法、画像補正方法およびそのプログラム | |
| JP5706190B2 (ja) | 計算装置、計算方法及び計算プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180402 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180402 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180402 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180413 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180424 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180524 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6350923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |