JP6290012B2 - 工作機械 - Google Patents
工作機械 Download PDFInfo
- Publication number
- JP6290012B2 JP6290012B2 JP2014125248A JP2014125248A JP6290012B2 JP 6290012 B2 JP6290012 B2 JP 6290012B2 JP 2014125248 A JP2014125248 A JP 2014125248A JP 2014125248 A JP2014125248 A JP 2014125248A JP 6290012 B2 JP6290012 B2 JP 6290012B2
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- main shaft
- spindle
- sensor group
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q17/00—Arrangements for observing, indicating or measuring on machine tools
- B23Q17/22—Arrangements for observing, indicating or measuring on machine tools for indicating or measuring existing or desired position of tool or work
- B23Q17/2233—Arrangements for observing, indicating or measuring on machine tools for indicating or measuring existing or desired position of tool or work for adjusting the tool relative to the workpiece
- B23Q17/2275—Arrangements for observing, indicating or measuring on machine tools for indicating or measuring existing or desired position of tool or work for adjusting the tool relative to the workpiece of a tool-axis relative to a workpiece-axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B39/00—General-purpose boring or drilling machines or devices; Sets of boring and/or drilling machines
- B23B39/14—General-purpose boring or drilling machines or devices; Sets of boring and/or drilling machines with special provision to enable the machine or the drilling or boring head to be moved into any desired position, e.g. with respect to immovable work
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B41/00—Boring or drilling machines or devices specially adapted for particular work; Accessories specially adapted therefor
- B23B41/16—Boring or drilling machines or devices specially adapted for particular work; Accessories specially adapted therefor for boring holes with high-quality surface
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B49/00—Measuring or gauging equipment on boring machines for positioning or guiding the drill; Devices for indicating failure of drills during boring; Centering devices for holes to be bored
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/50—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism
- B23Q1/54—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only
- B23Q1/545—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces
- B23Q1/5462—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces with one supplementary sliding pair
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q15/00—Automatic control or regulation of feed movement, cutting velocity or position of tool or work
- B23Q15/007—Automatic control or regulation of feed movement, cutting velocity or position of tool or work while the tool acts upon the workpiece
- B23Q15/12—Adaptive control, i.e. adjusting itself to have a performance which is optimum according to a preassigned criterion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q15/00—Automatic control or regulation of feed movement, cutting velocity or position of tool or work
- B23Q15/007—Automatic control or regulation of feed movement, cutting velocity or position of tool or work while the tool acts upon the workpiece
- B23Q15/14—Control or regulation of the orientation of the tool with respect to the work
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q17/00—Arrangements for observing, indicating or measuring on machine tools
- B23Q17/24—Arrangements for observing, indicating or measuring on machine tools using optics or electromagnetic waves
- B23Q17/2428—Arrangements for observing, indicating or measuring on machine tools using optics or electromagnetic waves for measuring existing positions of tools or workpieces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2215/00—Details of workpieces
- B23B2215/76—Components for turbines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2270/00—Details of turning, boring or drilling machines, processes or tools not otherwise provided for
- B23B2270/48—Measuring or detecting
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T408/00—Cutting by use of rotating axially moving tool
- Y10T408/16—Cutting by use of rotating axially moving tool with control means energized in response to activator stimulated by condition sensor
- Y10T408/175—Cutting by use of rotating axially moving tool with control means energized in response to activator stimulated by condition sensor to control relative positioning of Tool and work
Description
Claims (9)
- ワークに所望の大きさの孔を加工するための工作機械であって、
本体部と、
前記本体部に支持され、ワークを保持するワーク保持部と、
工具を保持する主軸と、
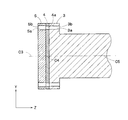
前記主軸を回転軸の周りで回転可能に保持するスピンドル、及び、前記スピンドルの周りを覆うハウジングを有するスピンドルユニットと、
前記スピンドルユニットに保持された前記主軸の前記ワークに対する傾きを変更可能となるように当該スピンドルユニットを保持し、且つ、前記スピンドルユニットを前記本体部に対して相対移動させる軸傾け並進駆動手段と、
前記ハウジングに固定され、当該ハウジングから前記主軸の周りを取り囲むように延び出るセンサマウントと、
前記センサマウントに保持され各々が計測対象との距離を計測可能な複数のセンサからなるセンサ群と、
前記センサ群による計測結果に基づいて前記軸傾け並進駆動手段を制御して、前記主軸の前記ワークに対する傾きを補正する制御部と、
を備え、
前記制御部は、前記軸傾け並進駆動手段を制御して、前記センサ群と共に前記主軸を前記回転軸の軸方向に沿って送って、前記センサ群を、前記ワークに設けられた孔、又は、前記ワークの前記主軸側を向く面に取り付けられる基準孔プレートに設けられた孔に挿入するようになっており、
前記センサ群は、前記ワークに設けられた孔に挿入された際に前記ワークに設けられた孔を規定する壁面との距離を計測するか、又は、前記基準孔プレートに設けられた孔に挿入された際に前記基準孔プレートに設けられた孔を規定する壁面との距離を計測するようになっている、工作機械。 - 前記センサ群は、前記回転軸の回転方向に並べられた複数の前記センサからなる小センサ群を複数含み、
前記複数の小センサ群が、前記回転軸の軸方向に並べて配置されている、請求項1に記載の工作機械。 - 前記制御部は、前記軸傾け並進駆動手段を制御して、前記センサ群と共に前記主軸を前記回転軸の軸方向に沿って少なくとも或る送り位置まで送り、
前記主軸が前記或る送り位置に位置するときに、前記センサ群は、前記回転軸の軸方向に沿ってずれた複数の位置にて、前記ワークに設けられた孔を規定する壁面との距離を計測するようになっており、
前記制御部は、前記主軸が前記或る送り位置に位置するときに前記センサ群が前記回転軸の軸方向に沿ってずれた複数の位置にて前記ワークに設けられた孔を規定する壁面との距離を計測した計測結果から、前記主軸の前記ワークに対する傾きを特定することができるようになっている、請求項1または2に記載の工作機械。 - 前記制御部は、前記軸傾け並進駆動手段を制御して、前記センサ群と共に前記主軸を前記回転軸の軸方向に沿って各送り位置を通過するように送り、
前記主軸が各送り位置に位置するときの各々において、前記センサ群は、前記回転軸の軸方向に沿ってずれた複数の位置にて、前記ワークに設けられた孔を規定する壁面との距離を計測するようになっており、
前記制御部は、前記主軸が各送り位置に位置するときに前記センサ群が前記回転軸の軸方向に沿ってずれた複数の位置にて前記ワークに設けられた孔を規定する壁面との距離を計測した計測結果から、当該送り位置における前記主軸の前記ワークに対する傾きを他の送り位置における前記傾きと独立して特定することができるようになっている、請求項1または2に記載の工作機械。 - 前記制御部は、前記軸傾け並進駆動手段を制御して、前記センサ群と共に前記主軸を前記回転軸の軸方向に沿って少なくとも或る送り位置まで送り、
前記主軸が前記或る送り位置に位置するときに、前記センサ群は、前記回転軸の軸方向に沿ってずれた複数の位置にて、前記ワークの前記主軸側を向く面に取り付けられる基準孔プレートに設けられた孔を規定する壁面との距離を計測するようになっており、
前記制御部は、前記主軸が前記或る送り位置に位置するときに前記センサ群が前記回転軸の軸方向に沿ってずれた複数の位置にて前記基準孔プレートに設けられた孔を規定する壁面との距離を計測した計測結果から、前記主軸の前記ワークに対する傾きを特定することができるようになっている、請求項1乃至4のいずれか一項に記載の工作機械。 - 前記制御部は、前記軸傾け並進駆動手段を制御して、前記センサ群と共に前記主軸を前記回転軸の軸方向に沿って各送り位置を通過するように送り、
前記主軸が各送り位置に位置するときの各々において、前記センサ群は、前記回転軸の軸方向に沿ってずれた複数の位置にて、前記ワークの前記主軸側を向く面に取り付けられる基準孔プレートに設けられた孔を規定する壁面との距離を計測するようになっており、
前記制御部は、前記主軸が各送り位置に位置するときに前記センサ群が前記回転軸の軸方向に沿ってずれた複数の位置にて前記基準孔プレートに設けられた孔を規定する壁面との距離を計測した計測結果から、当該送り位置における前記主軸の前記ワークに対する傾きを他の送り位置における前記傾きと独立して特定することができるようになっている、請求項1乃至5のいずれか一項に記載の工作機械。 - 前記回転軸の軸方向に沿って前記主軸を送った各送り位置において、前記主軸の前記ワークに対する傾きを補正する量は、前記センサ群が当該送り位置にて前記基準孔プレートに設けられた孔を規定する壁面との距離を計測した計測結果から特定された前記主軸の前記ワークに対する傾き量の大きさに相当する、請求項6に記載の工作機械。
- 前記制御部は、前記回転軸の軸方向に沿った前記主軸の送り量に応じて、前記主軸の前記ワークに対する傾きを補正するようになっている、請求項3乃至7のいずれか一項に記載の工作機械。
- 前記軸傾け並進駆動手段は、前記スピンドルユニットに保持された前記主軸の前記ワークに対する傾きを変更可能となるように当該スピンドルユニットを保持し、且つ、前記スピンドルユニットを前記ワークに対して接離させる軸傾け部と、前記軸傾け部を前記本体部に対して相対移動させる並進駆動部と、を有する請求項1乃至8のいずれか一項に記載の工作機械。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014125248A JP6290012B2 (ja) | 2014-06-18 | 2014-06-18 | 工作機械 |
| US14/729,744 US9636794B2 (en) | 2014-06-18 | 2015-06-03 | Machine tool |
| EP15171241.1A EP2957383B1 (en) | 2014-06-18 | 2015-06-09 | Machine tool |
| KR1020150084914A KR20150145187A (ko) | 2014-06-18 | 2015-06-16 | 공작 기계 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014125248A JP6290012B2 (ja) | 2014-06-18 | 2014-06-18 | 工作機械 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016003985A JP2016003985A (ja) | 2016-01-12 |
| JP2016003985A5 JP2016003985A5 (ja) | 2017-03-30 |
| JP6290012B2 true JP6290012B2 (ja) | 2018-03-07 |
Family
ID=53489788
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014125248A Expired - Fee Related JP6290012B2 (ja) | 2014-06-18 | 2014-06-18 | 工作機械 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9636794B2 (ja) |
| EP (1) | EP2957383B1 (ja) |
| JP (1) | JP6290012B2 (ja) |
| KR (1) | KR20150145187A (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5675415B2 (ja) * | 2011-02-16 | 2015-02-25 | 三菱重工業株式会社 | 穴加工方法及び穴加工工具 |
| US10183371B2 (en) * | 2015-01-21 | 2019-01-22 | Breton Spa | Sensing and positioning device for a machining head of a machine tool, machine tool comprising such a device, and associated machining method |
| JP6921511B2 (ja) * | 2016-12-02 | 2021-08-18 | 株式会社東京精密 | 自動工具交換装置付き工作機械及び自動測定方法 |
| CN106938400A (zh) * | 2016-12-20 | 2017-07-11 | 青岛约克运输设备有限公司 | 一种简易镗床用调刀装置 |
| CN107544023B (zh) * | 2017-07-28 | 2019-06-04 | 中广核核电运营有限公司 | 发电机转子抽穿测控系统 |
| CN109317717A (zh) * | 2017-08-01 | 2019-02-12 | 上海电气电站设备有限公司 | 用于汽轮机的数控镗缸机 |
| CN109317712A (zh) * | 2017-08-01 | 2019-02-12 | 上海电气电站设备有限公司 | 用于加工汽轮机转子联轴器孔的镗孔机 |
| CN112296383A (zh) * | 2020-10-23 | 2021-02-02 | 湖南乔伟生态科技新材料有限公司 | 一种长条板材连续等距打孔装置 |
| CN116276242B (zh) * | 2023-03-29 | 2024-05-03 | 宁波迈拓斯数控机械有限公司 | 一种叶轮数控铣床加工中心 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57156512A (en) * | 1981-03-20 | 1982-09-27 | Tokyo Daigaku | Detector for turning angle of inspection table |
| JP3412208B2 (ja) * | 1992-12-03 | 2003-06-03 | 松下電器産業株式会社 | バイト移動式切削装置 |
| US6074139A (en) | 1998-12-02 | 2000-06-13 | General Electric Co. | Process for boring bolt holes in mating coupling flanges |
| JP2002096232A (ja) | 2000-09-21 | 2002-04-02 | Toyoda Mach Works Ltd | 工作機械の制御方法 |
| DE10250326A1 (de) * | 2001-10-31 | 2003-05-15 | Grob Werke Burkhart Grob Ek | Werkzeugmaschine und Verfahren zur Justage der Spindelposition dieser Werkzeugmaschine |
| US20040011149A1 (en) * | 2002-04-03 | 2004-01-22 | David Carroll | Integrated angular and radial position sensor |
| US7938602B2 (en) * | 2006-03-31 | 2011-05-10 | Jtekt Corporation | Three degree of freedom parallel mechanism, multi-axis control machine tool using the mechanism and control method for the mechanism |
| JP4962757B2 (ja) | 2006-03-31 | 2012-06-27 | 株式会社ジェイテクト | 空間3自由度パラレル機構の制御方法および空間3自由度パラレル機構 |
| JP2011121157A (ja) * | 2009-12-14 | 2011-06-23 | Mitsubishi Heavy Ind Ltd | 横中ぐり盤 |
| DE102010014817A1 (de) * | 2010-04-13 | 2011-10-13 | Stotz Feinmesstechnik Gmbh | Verfahren und Vorrichtung zur Rundheitsmessung |
-
2014
- 2014-06-18 JP JP2014125248A patent/JP6290012B2/ja not_active Expired - Fee Related
-
2015
- 2015-06-03 US US14/729,744 patent/US9636794B2/en not_active Expired - Fee Related
- 2015-06-09 EP EP15171241.1A patent/EP2957383B1/en not_active Not-in-force
- 2015-06-16 KR KR1020150084914A patent/KR20150145187A/ko not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| US9636794B2 (en) | 2017-05-02 |
| US20150367474A1 (en) | 2015-12-24 |
| EP2957383B1 (en) | 2017-08-30 |
| KR20150145187A (ko) | 2015-12-29 |
| EP2957383A1 (en) | 2015-12-23 |
| JP2016003985A (ja) | 2016-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6290012B2 (ja) | 工作機械 | |
| US9448552B2 (en) | Numerically-controlled machine tool and spindle error compensating method thereof | |
| US10073435B2 (en) | Reducing errors of a rotatory device, in particular for the determination of coordinates of a workpiece or the machining of a workpiece | |
| CN103365246B (zh) | 用于数控机床的误差校正的装置 | |
| US6973738B2 (en) | Measuring method and device, machine tool having such device, and work processing method | |
| US8152422B2 (en) | Control method for a machine tool with numerical control | |
| CN102639289B (zh) | 加工工具及其操作方法 | |
| JP5051925B2 (ja) | 運転中に位置合わせ可能なスピンドルを有するスピンドルユニット及びそれを備える工作機械 | |
| JP2016083729A (ja) | 幾何誤差同定システム、及び幾何誤差同定方法 | |
| EP3511677A1 (en) | Measurement method and apparatus | |
| JP2020196051A (ja) | 工作機械対象物の位置計測方法及び位置計測システム | |
| JP5355037B2 (ja) | 精度測定方法及び数値制御工作機械の誤差補正方法並びに誤差補正機能を有した数値制御工作機械 | |
| JP5496029B2 (ja) | 放電加工装置 | |
| JP4302380B2 (ja) | 深穴加工装置および深穴加工方法、深穴評価装置および深穴評価方法ならびに位置ずれ評価方法、深穴加工装置および深穴評価装置の光軸調整装置、光軸調整方法 | |
| JP6824798B2 (ja) | 内径測定装置およびそれを用いた内径測定方法 | |
| JP5581825B2 (ja) | 工作機械の基準位置検出装置および基準位置検出方法 | |
| JP2003159607A5 (ja) | ||
| JP2011093068A (ja) | 工作機械および変位計測器 | |
| ES2381928T3 (es) | Máquinas herramienta y métodos de funcionamiento de las mismas | |
| JP3337996B2 (ja) | 深穴加工装置及び深穴測定装置 | |
| CN102630192B (zh) | 用于钻削复杂面板的设备 | |
| CN113001259B (zh) | 用于测量钻孔的测量方法和测量系统以及具有测量系统的精密机床 | |
| JP6623061B2 (ja) | 工作機械及び工作機械の制御方法 | |
| JP6735735B2 (ja) | ワークピースを検査するための座標測定方法および同装置であって、理想的な形態から実質的に逸脱していないことが判っている基準形状を使用して測定補正値を生成するステップを含む、ワークピースを検査するための座標測定方法および同装置 | |
| JP2021051096A (ja) | 内径測定装置およびそれを用いた内径測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170224 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20171120 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20171121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180207 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6290012 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |