JP6286182B2 - 推定方法およびそれを利用した推定装置 - Google Patents
推定方法およびそれを利用した推定装置 Download PDFInfo
- Publication number
- JP6286182B2 JP6286182B2 JP2013225824A JP2013225824A JP6286182B2 JP 6286182 B2 JP6286182 B2 JP 6286182B2 JP 2013225824 A JP2013225824 A JP 2013225824A JP 2013225824 A JP2013225824 A JP 2013225824A JP 6286182 B2 JP6286182 B2 JP 6286182B2
- Authority
- JP
- Japan
- Prior art keywords
- node
- variable node
- factor
- sensor
- variable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
Description

Claims (3)
- 対象となる無線装置からの信号が複数のセンサのそれぞれにおいて受信されており、各センサから、当該センサにて測定された信号の到来方向の角度を取得する第1取得部と、
各センサから、当該センサにて測定された信号の受信電力を取得する第2取得部と
前記第1取得部において取得した角度をガウス分布にしたがうと近似することによって、センサ毎の第1変数ノードθ i を導出する第1処理部と、
前記第2取得部において取得した受信電力をガウス分布にしたがうと近似することによって、センサ毎の第6変数ノードp i を導出する第2処理部と、
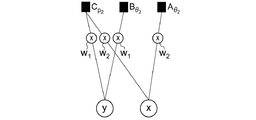
(1)一方において第1変数ノードθ i に接続されるとともに、他方において第2変数ノードΔx θi 、第3変数ノードΔy θi に接続されるセンサ毎の第1因子ノードと、(2)一方において複数のセンサにわたった第2変数ノードΔx θi に接続されるとともに、他方において第4変数ノードXに接続される第2因子ノードと、(3)一方において複数のセンサにわたった第3変数ノードΔy θi に接続されるとともに、他方において第5変数ノードYに接続される第3因子ノードと、(4)一方において複数のセンサにわたった第6変数ノードp i に接続されるとともに、他方において第4変数ノードX、第5変数ノードYに接続される第4因子ノードとが含まれた因子グラフであって、かつ(1)第1因子ノードは、平均をmと示し、標準偏差をσと示す場合に、
前記第3処理部において、第2因子ノードからの出力と第4因子ノードからの出力とが重みづけ加算されることによって、第4変数ノードXが導出されるとともに、第3因子ノードからの出力と第4因子ノードからの出力とが重みづけ加算されることによって、第5変数ノードYが導出され、
前記第3処理部において導出される第4変数ノードXと第5変数ノードYの組合せは、対象となる無線装置の位置座標を示し、
前記第3処理部における第1因子ノードでは、正接のテイラー展開のうち、一定次数までの項を使用することによって、第1変数ノードθ i から第2変数ノードΔx θi の平均値と分散値を導出するとともに、第1変数ノードθ i から第3変数ノードΔy θi の平均値と分散値を導出することを特徴とする推定装置。 - 前記第3処理部は、第4変数ノードXと第5変数ノードYとの収束の程度に応じて、反復処理の回数を決定することを特徴とする請求項1に記載の推定装置。
- 対象となる無線装置からの信号が複数のセンサのそれぞれにおいて受信されており、各センサから、当該センサにて測定された信号の到来方向の角度を取得するステップと、
各センサから、当該センサにて測定された信号の受信電力を取得するステップと
取得した角度をガウス分布にしたがうと近似することによって、センサ毎の第1変数ノードθ i を導出するステップと、
取得した受信電力をガウス分布にしたがうと近似することによって、センサ毎の第6変数ノードp i を導出するステップと、
(1)一方において第1変数ノードθ i に接続されるとともに、他方において第2変数ノードΔx θi 、第3変数ノードΔy θi に接続されるセンサ毎の第1因子ノードと、(2)一方において複数のセンサにわたった第2変数ノードΔx θi に接続されるとともに、他方において第4変数ノードXに接続される第2因子ノードと、(3)一方において複数のセンサにわたった第3変数ノードΔy θi に接続されるとともに、他方において第5変数ノードYに接続される第3因子ノードと、(4)一方において複数のセンサにわたった第6変数ノードp i に接続されるとともに、他方において第4変数ノードX、第5変数ノードYに接続される第4因子ノードとが含まれた因子グラフであって、かつ(1)第1因子ノードは、平均をmと示し、標準偏差をσと示す場合に、
第2因子ノードからの出力と第4因子ノードからの出力とが重みづけ加算されることによって、第4変数ノードXが導出されるとともに、第3因子ノードからの出力と第4因子ノードからの出力とが重みづけ加算されることによって、第5変数ノードYが導出され、
第4変数ノードXと第5変数ノードYの組合せは、対象となる無線装置の位置座標を示し、
第1因子ノードでは、正接のテイラー展開のうち、一定次数までの項を使用することによって、第1変数ノードθ i から第2変数ノードΔx θi の平均値と分散値を導出するとともに、第1変数ノードθ i から第3変数ノードΔy θi の平均値と分散値を導出することを特徴とする推定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013225824A JP6286182B2 (ja) | 2013-10-30 | 2013-10-30 | 推定方法およびそれを利用した推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013225824A JP6286182B2 (ja) | 2013-10-30 | 2013-10-30 | 推定方法およびそれを利用した推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015087245A JP2015087245A (ja) | 2015-05-07 |
| JP6286182B2 true JP6286182B2 (ja) | 2018-02-28 |
Family
ID=53050176
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013225824A Active JP6286182B2 (ja) | 2013-10-30 | 2013-10-30 | 推定方法およびそれを利用した推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6286182B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6433386B2 (ja) * | 2015-07-10 | 2018-12-05 | 株式会社光電製作所 | 推定方法およびそれを利用した推定装置 |
| JP2022015782A (ja) * | 2020-07-10 | 2022-01-21 | 株式会社日立国際電気 | 測位システム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001091622A (ja) * | 1999-09-24 | 2001-04-06 | Mitsubishi Electric Corp | 目標位置観測装置 |
| WO2008115209A2 (en) * | 2006-10-25 | 2008-09-25 | Massachusetts Institute Of Technology | Cooperative localization for wireless networks |
| JP5235560B2 (ja) * | 2008-08-15 | 2013-07-10 | 日本電信電話株式会社 | 端末位置推定システム及び方法ならびに位置推定装置 |
| TW201043995A (en) * | 2009-06-03 | 2010-12-16 | Ralink Technology Corp | Method and apparatus of positioning for a wireless communication system |
-
2013
- 2013-10-30 JP JP2013225824A patent/JP6286182B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015087245A (ja) | 2015-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7301156B2 (ja) | 量子系をシミュレートするための量子変分法、装置及び記憶媒体 | |
| Dai et al. | Sparse Bayesian learning approach for outlier-resistant direction-of-arrival estimation | |
| Soares et al. | Simple and fast convex relaxation method for cooperative localization in sensor networks using range measurements | |
| US8204714B2 (en) | Method and computer program product for finding statistical bounds, corresponding parameter corners, and a probability density function of a performance target for a circuit | |
| US11620530B2 (en) | Learning method, and learning apparatus, and recording medium | |
| JP6395677B2 (ja) | 到来方向推定装置 | |
| US10951982B2 (en) | Signal processing apparatus, signal processing method, and computer program product | |
| JP7235534B2 (ja) | マイクロホンアレイ位置推定装置、マイクロホンアレイ位置推定方法、およびプログラム | |
| JP2014215822A (ja) | 状態推定装置、方法、及びプログラム | |
| JP6396037B2 (ja) | データ解析装置及び方法 | |
| WO2020230214A1 (ja) | 深度推定装置、深度推定モデル学習装置、深度推定方法、深度推定モデル学習方法、及び深度推定プログラム | |
| Zaeemzadeh et al. | Robust target localization based on squared range iterative reweighted least squares | |
| JP6286182B2 (ja) | 推定方法およびそれを利用した推定装置 | |
| CN103237320A (zh) | 无线传感器网络基于混合量化卡尔曼融合的目标跟踪方法 | |
| JP6617771B2 (ja) | 線形パラメータ変動モデル推定システム、方法およびプログラム | |
| CN111175692A (zh) | 基于分层合成Lasso先验模型的离格稀疏贝叶斯DOA估计方法 | |
| Panwar et al. | Robust multistatic target localization in the presence of NLOS errors and outliers | |
| JP6396765B2 (ja) | 推定方法およびそれを利用した推定装置 | |
| CN111965593B (zh) | 一种信号的波达方向确定方法及装置 | |
| JP2016057165A (ja) | 無線通信装置及び推定方法 | |
| JP2016125854A (ja) | ノード位置推定方法、ノード位置推定装置、物理量分布検出方法及び物理量分布検出装置 | |
| CN113721191A (zh) | 自适应栅格化提升矩阵补全性能的信号源定位方法和系统 | |
| US9251436B2 (en) | Method for localizing sources of signals in reverberant environments using sparse optimization | |
| CN111880167A (zh) | 一种基于先随机后优化的波达方向估计方法 | |
| US11455372B2 (en) | Parameter estimation apparatus, parameter estimation method, and computer-readable recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160726 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20161011 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170704 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170901 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180130 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6286182 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |