以下、本発明に係る内燃機関の制御装置の実施形態を図面に基づいて説明する。
この実施形態では、4ストローク燃焼サイクルガソリン仕様の単気筒内燃機関01に適用したものであり、後述するように、気筒の機械圧縮比と機械膨張比をそれぞれ異なって変化させることのできるピストン位置可変機構1が設けられている点が特徴となっている。
〔第1実施形態〕
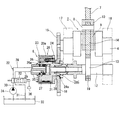
図1(リヤビュ−)及び図2は本発明の第1実施形態を示し、内燃機関01は、シリンダブロック02内形成されたシリンダボア03に沿って上下方向へ往復運動するピストン2と、該ピストン2の上下運動によって、ピストンピン3やピストン位置可変機構1の後述するリンク機構5を介して回転駆動するクランクシャフト4と、を備えている。図1中のピストン2の冠面2a上に一点鎖線で示す燃焼室境界線との間に隔成された空間は気筒内容積Vである。
前記ピストン位置可変機構1は、複数のリンクからなる前記リンク機構5や、該リンク機構5の姿勢を変化させる位相変更機構6などから構成されている。
前記リンク機構5は、前記ピストン1にピストンピン3を介して連結された第1リンクであるアッパリンク7と、該アッパリンク7に第1連結ピン8を介して揺動可能に連結されると共にクランクシャフト4のクランクピン9に回転可能に連結された第2リンクであるロアリンク10と、該ロアリンク10に第2連結ピン11を介して揺動可能に連結されると共にコントロ−ルシャフト12の偏心カム部13に回転可能に連結された第3リンクであるコントロ−ルリンク14と、から構成されている。
また、クランクシャフト4の前端部には、図1及び図2に示すように、駆動回転体である小径な第1ギヤ歯車15が固定されている一方、前記コントロールシャフト12の前端部側に従動回転体である大径な第2ギヤ歯車16が設けられ、前記第1ギヤ歯車15と第2ギヤ歯車16が噛み合ってクランクシャフト4の回転力が前記位相変更機構6を介してコントロールシャフト12に伝達されるようになっている。
前記第1ギヤ歯車15は、外径が第2ギヤ歯車16の外径の約半分の大きさになっており、したがって、前記前記クランクシャフト4の回転速度は、第1ギヤ歯車15と第2ギヤ歯車16の外径差によってコントロールシャフト12に半分の角速度に減速して伝達されるようになっている。
前記コントロールシャフト12は、前記位相変更機構6によって、前記第2ギヤ歯車16に対する位相が変化し、つまり前記クランクシャフト4に対して相対回転位相が変更されるようになっている。
前記クランクシャフト4とコントロールシャフト12は、シリンダブロックに設けられた共通の前後2つの軸受17,18によって回転自在に支持されている。また、前記偏心カム部13は、前記コントロ−ルリンク14の下端部に形成された大径部にニードルベアリング19を介して回転自在に連結されている。
前記位相変更機構6は、例えば先に本出願人が出願した特開2012−225287号公報に記載された油圧式(ベーンタイプ)の位相変更機構と同じ構造であるから簡単に説明する。
すなわち、この位相変更機構6は、図2及び図3A,B(フロントビュ−)に示すように、前記第2ギヤ歯車16が固定されたハウジング20と、該ハウジング20内に相対回転自在に収容され、前記コントロールシャフト12の一端部に固定されたベーンロータ21と、該ベーンロータ21を油圧によって正逆回転させる油圧回路22と、を備えている。
該ハウジング20は、円筒状のハウジング本体20aの前端開口が円板状のフロントカバー23によって閉塞されていると共に、後端開口が円盤状のリアカバー24によって閉塞されている。また、ハウジング本体20aの内周面の周方向の約90°位置には、4つの隔壁であるシュー20bが内方に向かって突設されている。
前記リアカバー24は、前記第2ギヤ歯車16の中央位置に両者一体に設けられ、外周部が4本のボルト25によって前記ハウジング本体20aとフロントカバー23に共締め固定されている。また、前記リアカバー24のほぼ中央には、前記ベーンロータ21の円筒部に外周に軸受される大径な軸受孔24aが軸方向に貫通形成されている。
前記ベーンロータ21は、中央にボルト挿通孔を有する円筒状のロータ26と、該ロータ26の外周面の周方向のほぼ90°位置に一体に設けられた4枚のベーン27とを備えている。
前記ロータ26は、前端側の小径筒部26aが前記フロントカバー23の中央支持孔に回転自在に支持されている一方、後端側の小径な円筒部26bが前記リアカバー24の軸受孔24aに回転自在に支持されている。
また、ベーンロータ21は、前記ロータ26のボルト挿通孔に軸方向から挿通した固定ボルト28によってコントロールシャフト12の前端部に軸方向から固定されている。
また、前記各ベーン27は、各シュー20b間に配置されていると共に、各外面の軸方向に形成された細長い保持溝内に前記ハウジング本体20aの内周面に摺接するシール部材及び該シール部材をハウジング本体内周面方向に押圧する板ばねが夫々嵌着保持されている。
また、この各ベーン27の両側と各シュー20bの両側面との間に、それぞれ4つの進角室40と遅角室41がそれぞれ隔成されている。
前記油圧回路22は、図2に示すように、前記各進角室40に対して作動油の油圧を給排する第1油圧通路28と、前記各遅角室41に対して作動油の油圧を給排する第2油圧通路29との2系統の油圧通路を有し、この両油圧通路28,29には、供給通路30とドレン通路31とが夫々通路切換用の電磁切換弁32を介して接続されている。前記供給通路30には、オイルパン33内の油を圧送する一方向のオイルポンプ34が設けられている一方、ドレン通路31の下流端がオイルパン33に連通している。
前記第1、第2油圧通路28,29は、前記フロントカバー23側に設けられた通路構成部の内部に形成されており、各一端部が前記通路構成部の前記ロータ26の小径筒部26aから内部の支持穴内に挿通配置された円柱部35を介して前記ロータ26内に連通している一方、他端部が前記電磁切換弁32に接続されている。
前記第1油圧通路28は、各進角室40と連通する図外の4本の分岐路とを備えている一方、第2油圧通路29は、各遅角室41と連通する第2油路とを備えている。
前記電磁切換弁32は、4ポート3位置型であって、内部の弁体が各油圧通路28,29と供給通路30及びドレン通路31とを相対的に切り替え制御するようになっていると共に、コントロールユニット36からの制御信号によって切り替え作動されるようになっている。
そして、前記電磁切換弁32の切り換え作動によって、前記各進角室40と各遅角室41に作動油を選択的に供給することによって前記ベーンロータ21(コントロールシャフト12)を前記クランクシャフト4に対して相対回転位相を変更させるようになっている。
また、前記各遅角室41内には、前記ベーンロータ21を遅角方向へ常時付勢する4本のコイルスプリング42がそれぞれ装着されている。
図4A〜D(リヤビュ−)は第2ギヤ歯車16とコントロ−ルシャフト12との相対回転位相を変化させた場合を示している。なお、この図では第1、第2ギヤ歯車15,16などは省略してある。
この相対回転位相は、本実施形態では、前述の位相変更機構6による相対回転位相変換制御により変化できるようになっているが、前記第2ギヤ歯車16とコントロ−ルシャフト12(偏心カム部13)との取り付け関係を相対的に変えることによって行うこともできる。
この図4では、図1に示す第2ギヤ歯車16とコントロ−ルシャフト12の相対位相を変えない状態でクランクシャフト4を時計方向に回転して行き、クランクピン9が真上を向いた位置(クランク角X=0°;吸気(排気)上死点付近)からさらに1回転して再度クランクピン9が真上を向いた位置(X=360°;圧縮上死点付近)での姿勢を示す。このとき、ピストン2の位置(高さ)は圧縮上死点付近なので高い位置になっている。またこのとき、例えば、図3Aに示すように、偏心カム部13の偏心方向は、真上方向よりα1(例えば137°)だけ時計方向に遅角した位置となっている。
すなわち、図4(リヤビュ−)における偏心カム部13の回転方向はクランクシャフトとは逆の反時計方向なので、図4Aに示す場合は真上方向よりα1だけ遅角しているのである。このような場合、制御位相α1と呼ぶことにする。
図4Bは、図4Aに対してコントロ−ルシャフト12(偏心カム部13)の位相をさらに遅角側のα2(例えば180°)まで遅角させた位置、すなわち、偏心カム部13の偏心方向が真下付近になっている。(制御位相α2)
また、図4Cに示す場合は制御位相α3(例えば222°)、図4Dでは制御位相α4(例えば240°)と、さらにコントロ−ルシャフト12(偏心カム部13)の位相を時計方向に遅角させていった位置となっている。
ここで、例えば、図4Cに示す制御位相α3と図4Dに示す制御位相α4の間を変換できる位相変更機構6の作動について図3A,Bに基づいて考察する。
この図3はフロントビュ−なので、第2ギヤ歯車16の回転方向は図3中では時計方向となる。図3Aが位相変更機構6のベーンロータ21の最遅角位置(制御位相α4と対応)、同図Bが最進角位置(制御位相α3と対応)を示しており、この最遅角、最進角位置ともに最大拡巾のベーン27(27a)の両側部が隣接する各シュー20bの一側面と他側面に当接してストッパ(遅角側ストッパ、進角側ストッパ)により規制されるようになっている。
ここで、前記ベーンロータ21は、各コイルスプリング42のばね力によって図3Aに示すように、最遅角位置付近で機械的に安定するようになっている。(つまり、デフォルト位置は最遅角位置)
位相変更機構6の位相変換角αTを、αT=α4−α3、例えば18°(=240°−222°)とすれば、α3⇔α4の変換での所望の変換角αT(18°)を実現できる。
さらに、前述の最遅角位置(デフォルト位置)が、図4Dに示すα4と一致するように、ベーンロータ21とコントロ−ルシャフト12との取り付け位相を設定すると、所望の図4C⇔図4Dの位相変換(α3⇔α4)が実現できるのである。
図5はピストン位置変化特性を示している。ここで、クランク角Xが0°では、クランクピン9が真上に位置しており、この付近で、ピストン2の吸気(または排気)上死点となっている。
クランク角Xが0°から時計方向に回転し始めると、図外の排気弁は完全に閉じ、図外の吸気弁が開作動を開始し、図外の吸気ポ−トより新気(混合気)の吸入を行う。次に、クランク角Xが180°となった付近でピストン吸気下死点となり、この付近で吸気弁は閉じられる。ここで、吸気上死点から吸気下死点までを吸気行程という。
さらに、クランクシャフト4が回転すると、吸気弁は完全に閉じられると共に、筒内混合気が圧縮されて、クランク角Xが360°となった位置(クランクピン9が再度真上位置)の付近で、ピストン圧縮上死点になる。ここで、吸気下死点から圧縮上死点までを圧縮行程という。
その後、火花点火(または圧縮着火)が行なわれて燃焼が開始され、その燃焼圧がピストン2を押し下げていき、クランク角Xが540°付近で膨張下死点となる。ここで、圧縮上死点から膨張下死点までを膨張行程という。
この膨張下死点付近で、排気弁が開作動を開始し、ピストン2の再上昇とともに燃焼ガス(排気ガス)を図外の排気ポ−トより排出し、再び排気(吸気)上死点付近であるクランク角Xが720°(0°)の位置(クランクピン9が真上位置)に戻るのである。(ここで、膨張下死点から排気(吸気)上死点までを排気行程と呼ぶ。)
以上のように、4サイクル機関としての作動が行われ、クランク角(X)720°を1周期とする周期的な作動になっている。
図5において、実線は図4Cの制御位相α3でのピストン位置特性(α3特性)を示し、破線は図4Dの制御位相α4でのピストン位置特性(α4特性)を示している。両特性とも、圧縮上死点でのピストン位置は略同一(Y0)で、吸気下死点位置は両特性で異なる。すなわち、圧縮上死点での気筒内容積Vは、両特性とも前記Y0により決まり、ほぼ同一(V0)となっている。
このV0とは、圧縮上死点において、シリンダヘッド側の燃焼室内面形状と、ピストン2の冠面2aの形状と、シリンダブロック02の内径と、図外のヘッドガスケット内径などに囲まれた容積、つまり、圧縮上死点における気体(混合気)の容積になる。
図5に示すα3特性では、吸気下死点のピストン位置はYC3であり、そこから圧縮上死点への長さ(圧縮ストロ−ク)はLC3であり、膨張下死点のピストン位置はYE3で、そこへの圧縮上死点からの長さ(膨張ストロ−ク)はLE3である。
ここで、α3特性での機械圧縮比CであるC3と、同機械膨張比EであるE3について考察する。
ボア(シリンダ内径)の面積をSとすると、吸気下死点での気筒内容積VC3は、VC3=V0+S×LC3 となる。
したがって、機械圧縮比C3=VC3÷V0=(V0+S×LC3)÷V0となる。
一方、機械膨張比E3=VE3÷V0=(V0+S×LE3)÷V0となる。
ここで、VE3とは膨張下死点での気筒内容積である。
なお、α3特性の場合は、図5に示すように、LC3≒LE3であるため、機械圧縮比C3≒機械膨張比E3となっている。ここで、相対比D=機械膨張比E÷機械圧縮比Cと定義する。
前記α3特性での相対比D3は、E3÷C3≒1となり、機械膨張比Eと機械圧縮比Cはほぼ同一のほぼ標準的な特性となっている。
すなわち、α3特性では、一般的な機関の通常のピストン位置変化特性(E=C、D=1)に近くなっている。
次に、前記α4特性での機械圧縮比CであるC4と、同機械膨張比EであるE4について考察する。
前記α3特性と同様に、機械圧縮比C4=VC4÷V0=(V0+S×LC4)÷V0となり、機械膨張比E4=VE4÷V0=(V0+S×LE4)÷V0 となる。
ここで、α4特性の場合は、図5に示すように、LC4>LE4であるため、機械圧縮比C4>機械膨張比E4となっている。すなわち、相対比D4=LE4÷LC4<1であり、これは、機械圧縮比が機械膨張比より、相対的に大きいことを意味する。また、α3特性との対比でみると、C4>C3と機械圧縮比は大きく、E4<E3と機械膨張比は小さくなっている。
図6A〜Dに制御位相α4(ベーンロータ21の最遅角デフォルト位置、例えば240°)でのクランク角を変化した場合、図6E〜Hに制御位相α3(ベーンロータ21の最進角位置、例えば222°)でのクランク角を変化した場合の、それぞれの機構姿勢変化図を示している。(全てリアビュー)
ここで、図6のA及びEは吸気(排気)上死点での姿勢、B及びFは吸気下死点での姿勢、C及びGは圧縮上死点での姿勢、D及びHは膨張下死点での姿勢をそれぞれ示している。
図6E〜Hのα3特性の場合は、前述のように、LC3≒LE3であるため、機械圧縮比C3≒機械膨張比E3 (相対比D3≒1)となっている。
図6A〜Dのα4特性の場合は、前述のように、LC4>LE4であるため、機械圧縮比C4>機械膨張比E4 (相対比D4<1)となっている。そして、図6E〜Hのα3特性と比較すると、前述のように、LC4>LC3、LE4<LE3 となっている。
なぜこのようなピストン位置変化特性になるかを考察する。吸気下死点における偏心カム部13の偏心回転方向αCについてみてみると、図6Bに示すα4特性でのαC4は、図6Fに示すα3特性でのαC3に対して、時計方向(遅角方向)に位相変化しており、つまり偏心カム部13の偏心円中心は、α3特性に対して相対的に、右上方に移動しており、これによりコントロールリンク14は第2連結ピン11を右上方に押し上げ、ロアリンク10を、クランクピン9を支点として時計方向に回転させ、それにより第1連結ピン8の位置は下がり、もってアッパリンク7によりピストン2は下方に引き下げられる。これにより、LC4>LC3となる。
一方、膨張下死点における偏心カム部13の偏心回転方向αEについてみてみると、図6Dに示すα4特性でのαE4は、図6Hに示すα3特性でのαE3に対して、同様に時計方向(遅角方向)に変化しており、つまり偏心円中心は相対的に下方に移動しており、これによりコントロールリンク14は第2連結ピン11を左下方に引き下げ、ロアリンク10を、クランクピン9を支点として反時計方向に回転させ、これによって第1連結ピン8の位置は上がり、もってアッパリンク7によりピストン2は上方に押し上げられる。これにより、LE4<LE3 となる。
すなわち、図5に示す制御位相α3と制御位相α4のピストン位置変化特性の差は、図6に示す偏心カム部13の偏心位相の違いによるリンク姿勢の違いにより生み出されるのである。
一方、圧縮上死点位置についてみてみると、制御位相α3と制御位相α4のピストン2の位置はほぼ同じ位置であることは、前述の通りであるが、これは以下の理由による。すなわち、図6C、Gに示す圧縮上死点姿勢に示すように、α3特性とα4特性とも、クランクピン9と第1連結ピン8とピストンピン3がほぼ一直線に配置されており、この配置によりロアリンク10の回動により第1連結ピン8が回動してもピストンピン2の位置変化は僅かに抑えられるためである。
このため、α3特性の圧縮上死点のピストン位置(図5のY03)、α4特性の圧縮上死点ピストン位置(図5のY04)は実質ほぼ同じ位置となり、それを前述のY0としたのである。
しかしながら、Y03とY04で有意差がでた場合は、気筒内容積を各々V03、V04として前述のV0のかわりに用いて、各々の機械圧縮比C3、C4、各々の機械膨張比E3、E4、各々の総対比D3、D4を求めれば良い。
〔本実施形態の性能効果〕
機関停止時には、位相変更機構6のベーンロータ21は、図3Aに示す最遅角位置(反時計方向)に各コイルスプリング42のばね力によって押し付けられ安定しており(デフォルト位置)、その時、制御位相は前述のα4となっている。
したがって、冷機始動時には、予めベーンロータ21の最遅角位置であるα4の特性(図5の破線)になっており、この特性による排気エミッションの低減効果が、前記デフォルト設定によって始動燃焼のまさに初期から得られる。(また位相変更機構6の電磁切換弁32の電気系統が断線などの故障があった場合にもこの位置を維持できるので、その場合でも前述の排気エミッション低減効果が得られるので所謂メカニカルフェールセーフ効果も持つ。)
すなわち、この特性による排気エミッション低減効果については、まず1つ目として、機械膨張比E4が小さくなっているので、膨張仕事が減った分、内燃機関から排出される排気ガス温度が高まるので、下流の触媒の暖機が促進されて、エミッション転化率が向上する。(ア)
一方、2つ目として、機械圧縮比C4は大きくなっているので、圧縮上死点での筒内ガス温度は上昇し、冷機運転時において問題となる燃焼不良を改善し、もって内燃機関そのものから排出されるエミッションを低減できる。(イ)
以上のE4小、C4大、D4小(=E4÷C4)により、(ア)の効果と(イ)の効果の相乗効果として、触媒下流のテールパイプから大気に放出される排気エミッション量を低減できる。
ここで、相対比D4は1未満の小さな値となっており、これが小さいほど、機械膨張比が相対的に小さく、機械圧縮比が相対的に大きいことを意味しており、冷機時における排気エミッション性能の良さを示す指標とみることができる。
ところで、機関の暖機が完了すると、C4、E4、D4のままの状態では燃費が悪化する。なぜなら、機械膨張比E4が低いので、ピストン2による膨張仕事が低下し(ウ)、また機械圧縮比C4が高いので、暖機後では圧縮上死点温度が過度に高くなり、いわゆる冷却損失が増加し(エ)、もって以上の(ウ)(エ)による損失により燃費が悪化するのである。
また、機関運転状態が高負荷であれば、さらにノッキングやプレイグニッションという異常燃焼も誘発してしまい、一層燃費が悪化すると共に、トルクも低下するのである。
したがって、暖機後においては、位相変更機構6の電磁切換弁32からの制御油圧によりベーンロータ21が最進角位置に変換し、α3の特性(図5の実線)に切替えるのである。
これにより、標準的な機械膨張比E3、標準的な機械圧縮比C3に復帰し、相対比D3はほぼ1となり通常のピストン位置変化特性と同等となるので、上記(ウ)(エ)による損失により燃費悪化したり、さらには異常燃焼が誘発されるのを抑制できる。
なお、機関温度が冷機と暖機完了と中間にある場合は、その温度に応じて、低温になるほどベーンロータ21を遅角側へ変更して行き(α4に近づけて行き)、高温になるほど位相変更機構6によって進角側へ変更させていく(α3に近づけていく)ことによって、温度の変化毎に、排気エミッション性能と燃費性能を最適にバランスさせることができるのである。例えば、エミッションを充分に低い所定値に抑えつつ、可及的に燃費悪化を抑制することができる。
なお、ピストン2の位置変化特性は、前述のように、クランク角720°を周期とする周期的な作動が行なわれ、上死点としては、クランク角が0°付近と360°付近の2度あらわれる。
クランク角360°付近の上死点(前述したY0)は、吸気弁、排気弁とも完全に閉弁された前述の圧縮上死点となっており、クランク角0°付近の上死点(Y’03、Y’04)は、排気弁が閉じ吸気弁作動が開始される、もうひとつの上死点である吸気(排気)上死点となっている。
この吸気(排気)上死点位置(Y’03、Y’04)は、圧縮上死点(Y0)より低くなっている。これは、図6A、Eの吸気上死点姿勢で示すように、α3とα4とも、クランクピン9と第1連結ピン8とピストンピン3が一直線上ではなく、逆く字形状に折れ曲がって配置されており、この配置によりピストン2の位置が前述のY0より低下し、またα3とα4との間のコントロ−ルシャフト12の位相差により、つまり逆く字の角度の差により、ピストン2の上死点位置にY’03、Y’04という有意差が生じているのである。(図5)
なお、ここで、吸排気弁の作動タイミングをクランク角で360°設定をずらした場合を想定してみると、圧縮上死点と吸気(排気)上死点が入れ替わったことになり、すなわち圧縮上死点でのピストン2の位置変化特性と、吸気(排気)上死点でのピストン2の位置変化特性とが入れ替わることになるが、こうした場合であっても、前述してきたような本発明の基本的効果を得ることができる。
一方、この設定をずらさない場合、つまり前述してきた第1実施形態(図1〜図6)そのものについては、以下の格別な効果が得られる。
すなわち、圧縮上死点では、Y0という高いピストン上死点位置となることから、機械圧縮比C、機械膨張比Eを大きく設定できるので、本発明の効果を充分高めることができる。
しかも、このような高いピストン位置に設定しても、圧縮上死点では吸排気弁が作動せず閉止状態が継続するため、ピストン2と吸排気弁が干渉する問題は発生しない。
また、吸気(排気)上死点では、この付近で排気弁の閉作動および吸気弁の開作動が行なわれるので、仮にピストン位置がY0並に高いとこれら吸排気弁とピストン2との干渉が懸念されることになるが、前述のように、ピストン2の吸気(排気)上死点位置(Y’03、Y’04)が、圧縮上死点位置Y0より低いことから同干渉を回避できるのである。
また、本実施形態では、図2に示すように、減速されるコントロールシャフト12側の大径な第2ギヤ歯車16に位相変更機構6が設置されているため、クランクシャフト4側の小径な第1ギヤ歯車15に位相変更機構6が設置したと想定した場合に対して、ベーンロータ21の外径などを適宜大きく設定することが可能になり、位相変更機構6によるベーンロータ21の変換動力を高めることができ、変換応答性を向上させたり、耐負荷能力を高めることも可能となる。
〔第2実施形態〕
図7から図8は本発明の第2実施形態を示し、第1実施形態に対して、ベーンロータ21の変換角とベーンロータ21とコントロ−ルシャフト12との相対回転位相を変更し、図4B、Cに示す制御位相α2と制御位相α3との間を変換できるようにしている。
前記図3における変換角αTは、α3−α2(例えば、222°−180°=42°)とし、同様にベーンロータ21を遅角側に付勢するコイルスプリング42が設けられている。
ちなみに、第2実施形態では第1実施形態に対して、ベーンロータ21の変換角が拡大するが、ハウジング本体20aの突部であるストッパ部付近や拡巾ベーン27aの側面部を肉抜することによって対応すれば良い。あるいは、ベーン27の枚数を4枚から3枚に減少させても、変換角拡大を実現できる。
そして、遅角側ストッパと拡巾ベーン27aが当接する最遅角位置(デフォルト位置)が、図4Cに示すα3の位置と一致するように、ベーンロータ21とコントロ−ルシャフト12の取り付け位相を設定すれば良い。
しかし、このように、ベーンロータ21の変換角拡大に伴い、ベーン27の枚数を減らしたりすると、位相変更機構6の油圧による変換動力(駆動力)が減少し、変換応答性悪化が懸念される。
ところが、前述のように、減速される側の大径な第2ギヤ歯車16の方に位相変更機構6が設けられているため、ベーン27の外径などを適宜大きく設定することも可能になり、位相変更機構6によるベーンロータ21の変換動力を確保し、変換応答性の低下やベーンロータ21の位相保持能力の低下を抑制できるのである。
図7はピストン位置変化特性を示し、実線は第1実施形態の図4Cの制御位相α3と同じ特性(α3特性)を示すが、本実施形態ではベーンロータ21の最遅角(デフォルト)位置での特性となる。図7の一点鎖線は図4Bに示す制御位相α2の特性(α2特性)で、これが本実施形態のベーンロータ21の最進角位置での特性となる。
前記図4Bのα2の特性も、圧縮上死点のピストン2の位置はほぼ同一(前述のY0)であるが、吸気下死点位置と膨張下死点位置は、α3特性とは異なっている。
すなわち、図7に示すように、LC2<LE2であるため、機械圧縮比C2<機械膨張比E2となっており、相対比D2=LE2÷LC2>1であり、これは、機械膨張比が機械圧縮比よりも相対的に大きいことを意味する。
また、α3との対比でみると、C2<C3と機械圧縮比は小さく、LE2>LE3と機械膨張比は大きくなっている。
図8A〜Dは、制御位相α2での機構姿勢変化図を示している。前述のように、LC2<LE2であるため、機械圧縮比C2<機械膨張比E2、すなわち、相対比D2>1となっている。
そして、図8E〜Hに記載した制御位相α3と比較すると、前述のように、LC2<LC3、LE2>LE3 となっている。
なぜこのような特性になるかを以下で考察する。図8B,Fに示す吸気下死点姿勢における偏心カム部13の偏心回転方向αCについて比較してみてみると、図8Bに示すα2特性でのαC2は、図8Fに示すα3特性でのαC3に対して、反時計方向(進角方向)に位相変化しており、つまり偏心円中心は左下方に移動しており、これによりコントロールリンク14は第2連結ピン11を相対的に左下方に引き下げ、ロアリンク10を、クランクピン9を支点として反時計方向に回転させ、それにより第1連結ピン8の位置は上がり、もってアッパリンク7によりピストン2は上方に押し上げられる。これにより、LC2<LC3 となる。
一方、図8D、Hに示す膨張下死点姿勢における偏心カム部13の偏心回転方向αEについてみてみると、図8Dに示すα2特性でのαE2は、図8Hに示すα3特性でのαE3に対して、同様に反時計方向(進角方向)に変化しており、つまり偏心円中心は相対的に上方に移動しており、これによりコントロールリンク14は第2連結ピン11を右上方に押し、ロアリンク10を、クランクピン9を支点に時計方向に回転させ、それにより第1連結ピン8の位置は下がり、もってアッパリンク7によりピストンは下方に引き下げられる。これにより、LE2>LE3 となる。
すなわち、図7に示す制御位相α3と制御位相α2のピストン位置変化特性の違いは、図8に示す偏心カム部13の偏心回転方向の違いによるリンク姿勢の違いにより生み出されるのである。
〔本実施形態の性能効果〕
機関の暖機後には、位相変更機構6のベーンロータ21は電磁切換弁32からの制御油圧により最進角位置に変換され、α2の特性、すなわち、機械圧縮比C2は小さく、機械膨張比E2が大きい特性となる。
ここで、機械膨張比E2が大きいことから、燃焼圧がピストンを押し下げることで行なう仕事を増やすことができ、これにより燃費を向上させることができる。
一方、このような機関の暖機後においては、機械圧縮比が高いと圧縮上死点での筒内ガス温度が過度に高くなって冷却損失が増えてしまう懸念があるが、本実施形態のように、機械圧縮比C2が低下しているので、このような冷却損失の発生を抑制することで一層燃費(熱効率)を向上させることができる。
また、機関高負荷ではこの高機械圧縮比によりノッキングなどの異常燃焼が生じ易いが、これも機械圧縮比低下によって回避することができるのである。
ここで、前述した従来の技術(特開2002−276446号公報)でも機械圧縮比を低下制御することでノッキングを防止できるが、追随して機械膨張比も低下してしまい、燃費悪化やトルク低下を伴う。さらには、機械膨張比低下による排温上昇に伴い、触媒が熱劣化してしまうという問題が生じる。
これに対して、本実施形態では高機械膨張比のため、これらの問題を回避できる。
ところで、本実施形態において、仮に冷機時においても、このようなピストン位置変化特性であったとすると、排気エミッション面から不都合が生じる。すなわち、機械膨張比E2が大きいので、膨張仕事が増える分、機関本体から排出される排気ガス温度が低下してしまい、下流の触媒の暖気が進まず、触媒による排気エミッション転化性能が低下する(カ)。
さらに、機械圧縮比が低いので、冷機時において圧縮上死点での筒内ガス温度も相対的に低く、燃焼が悪いので機関本体そのものから排出されるエミッションも増加する(キ)。
以上の2つの(カ)(キ)により、触媒下流のテ−ルパイプからの大気に排出エミッションが増加してしまう。
そこで、冷機時は、α3特性のような通常のピストン位置変化特性にするのである。これにより、冷機時において大気に排出される排気エミッション増加を回避しつつ、前記暖機後の燃費低減などの効果を得ることができるのである。
なお、冷機時と暖機後の間の中間の温度(暖機途中)においては、位相変更機構6のベーンロータ21の回転位相を制御し、低温になるほどα3に近づけていき、高温になるほどα2に近づけていくように制御するのである。
これにより、温度毎に燃費性能と排気エミッション性能を最適にバランスされることができる。例えば、排気エミッションを抑えつつ可及的に燃費を向上することができる。
〔第3実施形態〕
図9及び図10は本発明の第3実施形態を示し、第1実施形態や第2実施形態に対して、ベーンロータ21の変換角とベーンロータ21とコントロ−ルシャフト12の相対回転位相をさらに変更し、図4における制御位相α1と制御位相α4との間を変換できるようにした。
図3における変換角αTは、α4−α1(例えば、240°−137°=103°)と一層大きくなる。ベーン27の枚数を2枚に減少させて変換角拡大をしても良いが、本実施形態では、位相変更機構として、特開2012−197755号公報や特開2012−180816号公報に記載されているような電動式のものを用いたものである。
前記2つの公報に記載の位相変更機構によれば、電動モータの回転により減速機構を介して、カムシャフトとタイミングスプロケットとの位相を変換する機構となっているが、本実施形態では、このカムシャフトの代わりに前記コントロールシャフト12を、タイミングスプロケットの代わりに前記第2ギヤ歯車16を用いている。このように構成することによって、ベーンとハウジングの干渉などの機構レイアウトからの変換角制約はなくなり、前記2つの公報に記載されているように、自在に設定したストッパ凸部とストッパ凹部の関係のみで最遅角と最進角の回動規制が可能になる。
本実施形態では、これにより、電動式位相変更機構の出力軸の最進角位相をα1、最遅角位相をα4に設定している。
また、第1・第2実施形態と同様にコントロ−ルシャフト12を遅角方向に付勢する図外の付勢手段も設けられている。
図9にはピストン位置変化特性を示し、破線は制御位相α4での特性(最遅角)を示し、これは第1実施形態の図5のα4特性と同じ特性で、実線の方は制御位相α1での特性(最進角)で、図4の制御位相α1に対応している。
この図9から分かるように、制御位相α1のピストン位置変化特性では、圧縮ストロ−クLC1は充分小さく、膨張ストロ−クLE1は充分大きくなっている。したがって、機械圧縮比C1は充分小さく、機械膨張比E1は充分大きくなっており、相対比D1(E1÷C1)が1を充分超えた大きな値になっている。
図10A〜Dは制御位相α1での機構姿勢変化図を示し、図6、図8同様に、Aは吸気(排気)上死点、Bは吸気下死点、Cは圧縮上死点、Dは膨張下死点での各姿勢を示す。
同図Bに示す吸気下死点姿勢での偏心カム部13の偏心回転方向αC1についてみてみると、コントロールリンク14の方向とほぼ逆方向になっている。このため、コントロールリンク14及び第2連結ピン11はほぼ最大限左下方向に引き下げられ、ロアリンク10はクランクピン9を中心に反時計方向にほぼ最大限位相変化し、それに伴い、第1連結ピン8はほぼ最大限上方に移動し、もってアッパリンク7によりピストン2はほぼ最大限上方に押し上げられる。
これにより、LC1は充分小さく、且つほぼ最大限小さくなる。(LC1<LC2<LC3<LC4)
一方、図10Dに示す膨張下死点姿勢で偏心カム部13の偏心回転方向αE1についてみてみると、コントロールリンク14の方向とほぼ同方向になっている。このため、コントロールリンク14及び第2連結ピン11はほぼ最大限右上方向に押し上げられ、ロアリンク10はクランクピン3を中心に時計方向にほぼ最大限界位相変化し、それに伴い、第1連結ピン8はほぼ最大限下方に移動し、もってアッパリンク7によりピストン2はほぼ最大限下方に引き下げられる。これにより、LE1は充分に大きく、且つほぼ最大限に大きくなる。(LE1>LE2>LE3>LE4)
すなわち、相対比D1(=LE1/LC1)も充分大きく、かつほぼ最大限大きくなる。(D1>D2>D3>D4)
これらの特徴は、偏心カム部13の偏心回転方向によるリンク姿勢の違いにより生み出されるのである。
〔本実施形態の性能効果〕
内燃機関の暖機完了後には、電動式の位相変更機構により偏心カム部13は最進角位置に変換され、α1の特性、すなわち、機械圧縮比C1は充分に、かつほぼ最大限に小さく、機械膨張比E1は充分に、かつほぼ最大限に大きい特性に制御される。
ここで、機械膨張比E1がほぼ最大限に大きいことから、燃焼圧がピストンを押し下げることで行なう仕事をほぼ最大限増やすことができる。
一方、このような暖機完了後においては、圧縮上死点での筒内ガス温度が過度に高くなって、冷却損失が増えてしまう懸念があるが、本実施形態のように、機械圧縮比C1がほぼ最大限低下できるので、このような冷却損失の発生を充分に抑制することができる。
また、機関高負荷でのノッキングなどの異常燃焼も、ほぼ最小の機械圧縮比C1により充分抑制しつつ、ほぼ最大の機械膨張比E1により、燃費を充分向上できる。さらには、ほぼ最大の機械膨張比E1により排温(高温の高負荷排温)を充分低下させ、触媒の熱劣化を充分に抑制できる。
以上のような、十分な膨張仕事と冷却損失低減により、燃費(熱効率)を十分向上させたり、高負荷においては、さらに十分に排温を低下させ触媒熱劣化を防止したりできる。
ここで、相対比D1(=E1÷C1)について見てみると、前述のように、1を超えた充分大きな値になっており、これが大きいほど、機械膨張比が相対的に高く、機械圧縮比が相対的に低いことを意味しており、燃費性能などにおける前述の効果の高さを示す指標とみることができる。
冷機時においては、仮にこのようなピストン位置変化特性(ほぼ最小機械圧縮比、ほぼ最大機械膨張比、ほぼ最大相対比)であったとすると、排気エミッション面から大きな不都合が生じる。
すなわち、機械膨張比E1がほぼ最大なので、膨張仕事が充分に増加する分、機関本体から排出される排気ガス温度が過度に低下してしまい、後流の触媒での暖気が進まずエミッション転化性能が著しく低下する。
さらに、機械圧縮比がほぼ最小なので、冷機時において圧縮上死点での筒内ガス温度が過度に低下し、燃焼が著しく悪化し、機関本体から排出されるエミッションも著しく増加する。これらにより、触媒下流のテールパイプからの大気に排出エミッションが著しく増加してしまうのである。
そこで、冷機時は、α4のように逆に機械圧縮比Cが大きく、機械膨張比Eが小さなピストン位置変化特性に変換するのである。これによって、第1実施形態と同様に、燃焼改善及び排温向上の効果により、大気に排出される排気エミッションを逆に大幅に低減し、且つ通常の一般的なピストン位置変化特性(例えばα3のような 機械圧縮比C=機械膨張比E となる特性)よりも、さらに排気エミッションを低減できる。すなわち、相対比D4は、1より低い値であり、これが小さいほど、膨張比が相対的に小さく、圧縮比が相対的に大きいことを意味しており、排気エミッション性能の良さを示す指標とみることができるのは前述の通りである。
以上により、第1実施形態と同じく、暖機後の燃費をほぼ最大限向上できるとともに、冷機時の排気エミッションも低減できるのである。
この効果は言い換えると、暖機後には相対比を1より大きなD1まで高めて燃費効果を高め、冷機時には相対比を1より小さなD4まで下げて冷機時排気エミッションを向上させているのである。
なお、冷機時と暖機完了後の間の中間の温度(暖機中)においては、電動式位相変更機構の出力軸位相(偏心カム部13の位相)を高変換角制御し、低温になるほど制御位相α4に近づけていき、高温になるほど制御位相 α1に近づけていくように制御するのである。
これにより、温度毎に燃費性能とエミッション性能を高次元でバランスさせることができる。この場合、温度によらず高応答変換が可能な電動式位相変更機構を用いているので、油圧式の位相変更機構に対して変換遅れがなく、安定的な効果が得られるのである。
例えば、温度の変化毎に安定的に排気エミッションを低下させつつ、燃費を最大限向上することができる。
さらに、本実施形態では、過渡運転状態においても、電動式の位相変更機構による高応答大変換角位相制御を行うことによって種々の機関性能を高めることができ、例えば急加速時における、過渡トルクを向上できる。
機械圧縮比低減により耐ノック性向上ができることは前述の通りだが、機械圧縮比低減に伴って吸入ストロ−ク(≒圧縮ストロ−ク)が低下する傾向があり、充填効率が低下してしまう場合も考えられる。
したがって、過渡トルクを向上させるためには、ノッキングを抑制しつつ可及的に最大限充填効率を高める必要があることから、加速過渡の瞬時において、最適に、すなわち瞬時の過渡トルクが最大になるように機械圧縮比を適宜補正制御することが求められる場合もある。
ここで、近年増加してきたタ−ボなどの過給器を用いる場合には、さらに過給圧(大きいノッキングも発生し易い)も過渡変化するので、これも考慮してノッキングを抑制しつつ可及的に最大限充填効率高めることができる機械圧縮比に瞬時に制御することが求められる場合がある。
これらの要求に対し、本実施形態では、前述のように電動式位相変更機構を用いているので、機関油圧や機関温度によらず高応答の変換ができるため過渡トルク向上効果を充分に得ることができるのである。
また、例えば、このように加速して高負荷域になった後、低負荷域に移行した場合でも、電動式位相変更機構により瞬時に高機械膨張比にできるので、燃費効果も素早く得られる。
以上のように、大変換角の位相変更機構の高応答位相制御を行うことで、種々の機関性能を高めることができるのである。
〔第4実施形態〕
図11は第4実施形態を示し、リンク機構5を変更したものであって、前記コントロ−ルシャフト12の偏心カム部13と連結したコントロールリンク14に、2つの第1連結ピン8と第2連結ピン11が設けられている点などが第1〜第3実施形態と異なっている。
すなわち、このリンク機構5は、前記ピストン2にピストンピン3を介して連結されたアッパリンク7と、前記アッパリンク7に第1連結ピン8を介して揺動可能に連結されると共にコントロ−ルシャフト12の偏心カム部13に揺動可能に連結されたコントロールリンク14と、該コントロールリンク14に第2連結ピン11を介して揺動可能に連結されると共にクランクシャフト4のクランクピン9に回転可能に連結されたロアリンク10と、から構成されている。
そして、クランクシャフト4の回転は、第1〜第3実施形態と同様に、第1ギヤ歯車15を介して第2ギヤ歯車16(コントロールシャフト12)に半分の角速度に減速されて伝達される。
この第2ギヤ歯車16とコントロ−ルシャフト12は、第1〜第3実施形態と同様の位相可変機構6によって相対回転位相を変化できるようになっている。
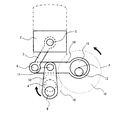
図11はピストン2の吸気下死点付近の姿勢、すなわちクランクピン9が真下を向いた位置を示している。
ここで、偏心カム部13の偏心回転方向はほぼ真上であり、クランクピン9、第2連結ピン11、ピストンピン3はほぼ一直線上に真上を向いている。これにより、ピストン2の位置はやや下方にシフトしており、吸入ストロ−ク及び圧縮ストロ−クが増大している。
何故なら、偏心カム部13の上方移動により、コントロールリンク14は、第2連結ピン11を支点として反時計方向に傾き、もって第1連結ピン8は相対的に下方に移動し、アッパリンク7はピストン2を引き下げるからである。
ここで、前記ピストン下死点付近は、膨張下死点側でなく吸気下死点側になるように吸排気弁タイミングが設定されており、前述の圧縮ストロ−ク増大により、高機械圧縮比に設定することができる。
次に、膨張下死点について考察すると、クランクシャフト4が時計方向に360°(1回転)回転すると、クランクピン9は再び真下を向いた位置、すなわち膨張下死点付近となる。偏心カム部13は、一対の第1、第2ギヤ歯車15,16を介して、半分の角速度で反時計方向に180°(360°の半分)に回転することから、偏心カム部13の偏心回転方向が今度はほぼ真下となる。
これにより、ピストン位置は、今度はやや上方にシフトすることになる。(膨張ストロ−ク減少)。何故なら、偏心カム部13の下方移動により、コントロールリンク14は、第2連結ピン11を支点として時計方向に傾き、もって第1連結ピン8は相対的に上方に移動し、アッパリンク7はピストン2を押し上げるからである。
このようにして、膨張ストロ−ク減少により、低機械膨張比に設定することができる。
ここでいう膨張ストロ−クや圧縮ストロ−クとは、圧縮上死点でのピストン位置からのストロ−クであり、したがって、第1実施形態のα4特性と同様に、高機械圧縮比で低機械膨張比となるのである。
以上説明してきたように、実施形態1〜3と異なるリンク機構5であっても、機械圧縮比と機械膨張比を異ならせることができる。
さらに前述の位相変更機構による種々の位相変換や取り付け位相の変更を行なえば、機械圧縮比と機械膨張比の両方を異ならせつつ適宜変化できるのは、第1〜第3実施形態と同様である。
本発明は、前記各実施形態の構成に限定されるものではなく、例えば各実施形態では単一気筒の内燃機関を示したが、2気筒や3気筒や4気筒などの多気筒に適用しても構わない。その場合、全気筒のピストン作動特性を単一ないし複数の位相変更機構により変化でき、もって全気筒を所望の機械圧縮比、機械膨張比に制御することが可能である。さらに、ガソリン機関のような火花点火エンジンだけでなく、ディ−ゼル機関のような圧縮着火エンジンに適用できるのが言うまでもない。
また、前記各実施形態では、ピストン2からクランクシャフト4までのリンク機構5として2つの機構タイプを示したが、このリンク機構などの構成は本発明の主旨から逸脱しない範囲で適宜選択すれば良く、特に限定されるものではない。
前記クランクシャフト4の回転を半分の角速度に減速して偏心カム部13に伝える減速機構として一対の第1、第2ギヤ歯車15,16の例を示したが、これに限定されるものではない。
また、各実施形態では、クランクシャフト4の回転方向と偏心カム部13の回転方向が逆方向になるが、同方向としても良い。例えば、クランクシャフト4側の第1ギヤ歯車15の回転をタイミングベルト(タイミングチェ−ン)を介して、半分の角速度に減速して、偏心カム部13側の第2ギヤ歯車16に伝達するようにしても良い。
この場合は、クランクシャフト4の回転方向と偏心カム部13の回転方向が同方向となり、クランクシャフト4の回転(横軸)に対するピストン位置変化特性(縦軸)は左右に裏返るが、本発明の主旨を実現できる。
以上説明してきたように、本発明の主旨から逸脱しない範囲であれば構成は特に限定されるものではない。