JP6258552B1 - 情報処理装置、情報処理方法、プログラム、ならびに、端末 - Google Patents
情報処理装置、情報処理方法、プログラム、ならびに、端末 Download PDFInfo
- Publication number
- JP6258552B1 JP6258552B1 JP2017196334A JP2017196334A JP6258552B1 JP 6258552 B1 JP6258552 B1 JP 6258552B1 JP 2017196334 A JP2017196334 A JP 2017196334A JP 2017196334 A JP2017196334 A JP 2017196334A JP 6258552 B1 JP6258552 B1 JP 6258552B1
- Authority
- JP
- Japan
- Prior art keywords
- input
- information processing
- area
- region
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Processing Or Creating Images (AREA)
Abstract
【解決手段】複数の領域に分割されたマップを参照する情報処理装置101において、学習部102は、物理エンジンの管理下で、複数の領域のうち第1領域内の第1代表点に存在するオブジェクトを複数の領域のうち第2領域内の第2代表点に到達させるために、第1代表点においてオブジェクトに対して与えるべき入力を学習する。算定部103は、物理エンジンの管理下で、第1領域内の任意の位置に存在するオブジェクトに対して学習された入力を与えると、オブジェクトが第2領域内のいずれかの位置に到達する到達確率を算定する。
【選択図】 図1
Description
物理エンジンの管理下で、前記複数の領域のうち第1領域内の第1代表点に存在するオブジェクトを前記複数の領域のうち第2領域内の第2代表点に到達させるために、前記第1代表点において前記オブジェクトに対して与えるべき入力を学習し、
前記物理エンジンの管理下で、前記第1領域内の任意の位置に存在する前記オブジェクトに対して前記学習された入力を与えると、前記オブジェクトが前記第2領域内のいずれかの位置に到達する到達確率を算定する。
前記情報処理装置により学習された前記入力、ならびに、前記情報処理装置により算定された前記到達確率を、コンピュータ通信網、もしくは、非一時的なコンピュータ読取可能な情報記録媒体を介して取得し、
前記第2領域に設定された有利度から前記第1領域に設定された有利度を減算して得られる差と、前記算定された到達確率と、の積を、前記第1領域のいずれかの位置に存在するオブジェクトに対して前記学習された入力を与えたときの利得の期待値とすることにより、前記物理エンジンの管理下で前記第1領域のいずれかの位置に存在するオブジェクトに対して与える入力として、前記学習された入力を採用するか否かを決定する
ように構成することができる。
本実施形態に係る情報処理装置および端末は、典型的には、プログラムをコンピュータが実行することによって実現される。ここで、コンピュータとしては、サーバコンピュータ、デスクトップ型コンピュータ、ノート型コンピュータ、タブレット型コンピュータ等のように、コンピュータとして製造、販売等されているもののほか、携帯電話、スマートホン、タブレット型電話等のように、電話機として製造、販売等されているもの、携帯ゲーム機、家庭用エンターテインメント装置等のように、ゲーム機やマルチメディア端末として製造、販売等されているものも含まれる。典型的には、本実施形態に係る情報処理装置は、高性能な据置型コンピュータやクラウド型コンピュータ等の上に実現され、端末は、スマートホンや携帯ゲーム機等の上に実現される。
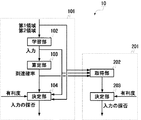
以下では、本実施形態に係る情報処理システムの概要について説明する。図1は、本発明の実施形態に係る情報処理システムの一例を示す説明図である。以下、本図を参照して説明する。
以下では、本実施形態にて情報処理装置101および端末201が参照するオブジェクトとマップについて説明する。
(a)オブジェクトに対する外力。現実世界や、現実を模した仮想空間においては、外力によって、オブジェクトの加速度が決められる。
(b)オブジェクトに対する撃力。現実世界や仮想空間においては、撃力によって、オブジェクトの運動量の変化が決められる。
(c)オブジェクトをゲームのプレイヤーが操作していると仮定した際のコントローラに対する操作。たとえば、コントローラにおいて、どのボタンやキーをどの強さで押圧等したか、どのスティックをどの強さでどちらへ傾けたか、タッチスクリーンをどの速さでどちらへどれだけの時間フリックしたか、などによって、上記の外力や撃力が決まる態様である。
本実施形態に係る事前処理は、情報処理装置101において実行される。図5は、本発明の実施形態に係る算定処理の制御の流れを示すフローチャートである。以下、本図を参照して説明する。
以下では、オブジェクトの移動戦略を決めるための決定処理について説明する。図11は、本発明の実施形態に係る決定処理の制御の流れを示すフローチャートである。以下、本図を参照して説明する。
以上説明したように、本実施形態に係る情報処理装置は、複数の領域に分割されたマップを参照し、
物理エンジンの管理下で、前記複数の領域のうち第1領域内の第1代表点に存在するオブジェクトを前記複数の領域のうち第2領域内の第2代表点に到達させるために、前記第1代表点において前記オブジェクトに対して与えるべき入力を学習する学習部、
前記物理エンジンの管理下で、前記第1領域内の任意の位置に存在する前記オブジェクトに対して前記学習された入力を与えると、前記オブジェクトが前記第2領域内のいずれかの位置に到達する到達確率を算定する算定部
を備える。
前記算定部は、
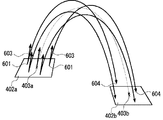
前記第1領域をなす第1凸包の各頂点に存在するオブジェクトに対して前記学習された入力を与えることによって、当該オブジェクトが到達する到達点を包含する第2凸包を求め、前記第2凸包において前記第2領域と共通する部分の割合を、前記到達確率とする
ように構成することができる。
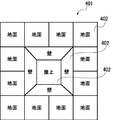
前記マップを分割する領域は、立体物を構成するポリゴンもしくは当該ポリゴンをさらに分割したサブポリゴンからなり、
前記算定部は、
前記第1領域をなす第1凸包の各頂点に存在するオブジェクトに対して前記学習された入力を与えることによって、当該オブジェクトが到達する到達点を求め、
前記オブジェクトが前記学習された入力によって前記第1代表点から前記第2代表点へ到達したときの前記オブジェクトの速度ベクトルに直交する投影面を設定し、
前記投影面に、前記第2領域と、前記到達点と、を、当該速度ベクトルの方向に平行投影し、
前記投影面において、前記投影された到達点を包含する第2凸包を求め、前記第2凸包において前記投影された第2領域と共通する部分の割合を、前記到達確率とする
ように構成することができる。
前記物理エンジンは決定的、もしくは、非決定的に動作し、
前記到達確率は、前記共通する部分の面積の、前記第2凸包の面積に対する比により定められる
ように構成することができる。
前記物理エンジンは非決定的に動作し、
前記学習部は、前記第1代表点に存在するオブジェクトを前記第2代表点の所定近傍内に到達させるために前記第1代表点において前記オブジェクトに対して与えるべき入力と、当該入力の信頼度と、を学習し、
前記算定部は、前記学習された入力の信頼度により、前記到達確率を算定する
ように構成することができる。
前記学習部は、焼きなまし法により、前記入力を学習する
ように構成することができる。
前記第2領域に設定された有利度から前記第1領域に設定された有利度を減算して得られる差と、前記算定された到達確率と、の積を、前記第1領域のいずれかの位置に存在するオブジェクトに対して前記学習された入力を与えたときの利得の期待値とすることにより、前記物理エンジンの管理下で前記第1領域のいずれかの位置に存在するオブジェクトに対して与える入力として、前記学習された入力を採用するか否かを決定する決定部
をさらに備えるように構成することができる。
前記情報処理装置が、物理エンジンの管理下で、前記複数の領域のうち第1領域内の第1代表点に存在するオブジェクトを前記複数の領域のうち第2領域内の第2代表点に到達させるために、前記第1代表点において前記オブジェクトに対して与えるべき入力を学習する学習ステップ、
前記情報処理装置が、前記物理エンジンの管理下で、前記第1領域内の任意の位置に存在する前記オブジェクトに対して前記学習された入力を与えると、前記オブジェクトが前記第2領域内のいずれかの位置に到達する到達確率を算定する算定ステップ
を備える。
物理エンジンの管理下で、前記複数の領域のうち第1領域内の第1代表点に存在するオブジェクトを前記複数の領域のうち第2領域内の第2代表点に到達させるために、前記第1代表点において前記オブジェクトに対して与えるべき入力を学習する学習部、
前記物理エンジンの管理下で、前記第1領域内の任意の位置に存在する前記オブジェクトに対して前記学習された入力を与えると、前記オブジェクトが前記第2領域内のいずれかの位置に到達する到達確率を算定する算定部
として機能させる。
上記の情報処理装置により算定された前記到達確率を、コンピュータ通信網、もしくは、非一時的なコンピュータ読取可能な情報記録媒体を介して取得する取得部、
前記第2領域に設定された有利度から前記第1領域に設定された有利度を減算して得られる差と、前記算定された到達確率と、の積を、前記第1領域のいずれかの位置に存在するオブジェクトに対して前記学習された入力を与えたときの利得の期待値とすることにより、前記物理エンジンの管理下で前記第1領域のいずれかの位置に存在するオブジェクトに対して与える入力として、前記学習された入力を採用するか否かを決定する決定部
を備えるように構成することができる。
101 情報処理装置
102 学習部
103 算定部
104 決定部
201 端末
202 取得部
203 決定部
301 仮想空間
401 マップ
402,402a,402b 領域
403a,403b 代表点
405 近傍
601 出発点
603 代表点に対して学習された入力
604 到達点
605 凸包
701 速度ベクトル
702 投影面
703 投影領域
704 投影到達点
705 投影凸包
Claims (10)
- 複数の領域に分割されたマップを参照する情報処理装置であって、
物理エンジンの管理下で、前記複数の領域のうち第1領域内の第1代表点に存在するオブジェクトを前記複数の領域のうち第2領域内の第2代表点に到達させるために、前記第1代表点において前記オブジェクトに対して与えるべき入力を学習する学習部、
前記物理エンジンの管理下で、前記第1領域内の任意の位置に存在する前記オブジェクトに対して前記学習された入力を与えると、前記オブジェクトが前記第2領域内のいずれかの位置に到達する到達確率を算定する算定部
を備えることを特徴とする情報処理装置。 - 前記算定部は、
前記第1領域をなす第1凸包の各頂点に存在するオブジェクトに対して前記学習された入力を与えることによって、当該オブジェクトが到達する到達点を包含する第2凸包を求め、前記第2凸包において前記第2領域と共通する部分の割合を、前記到達確率とする
ことを特徴とする請求項1に記載の情報処理装置。 - 前記マップを分割する領域は、立体物を構成するポリゴンもしくは当該ポリゴンをさらに分割したサブポリゴンからなり、
前記算定部は、
前記第1領域をなす第1凸包の各頂点に存在するオブジェクトに対して前記学習された入力を与えることによって、当該オブジェクトが到達する到達点を求め、
前記オブジェクトが前記学習された入力によって前記第1代表点から前記第2代表点へ到達したときの前記オブジェクトの速度ベクトルに直交する投影面を設定し、
前記投影面に、前記第2領域と、前記到達点と、を、当該速度ベクトルの方向に平行投影し、
前記投影面において、前記投影された到達点を包含する第2凸包を求め、前記第2凸包において前記投影された第2領域と共通する部分の割合を、前記到達確率とする
ことを特徴とする請求項1に記載の情報処理装置。 - 前記物理エンジンは決定的、もしくは、非決定的に動作し、
前記到達確率は、前記共通する部分の面積の、前記第2凸包の面積に対する比により定められる
ことを特徴とする請求項2または3に記載の情報処理装置。 - 前記物理エンジンは非決定的に動作し、
前記学習部は、前記第1代表点に存在するオブジェクトを前記第2代表点の所定近傍内に到達させるために前記第1代表点において前記オブジェクトに対して与えるべき入力と、当該入力の信頼度と、を学習し、
前記算定部は、前記学習された入力の信頼度により、前記到達確率を算定する
ことを特徴とする請求項1に記載の情報処理装置。 - 前記学習部は、焼きなまし法により、前記入力を学習する
ことを特徴とする請求項1に記載の情報処理装置。 - 前記第2領域に設定された有利度から前記第1領域に設定された有利度を減算して得られる差と、前記算定された到達確率と、の積を、前記第1領域のいずれかの位置に存在するオブジェクトに対して前記学習された入力を与えたときの利得の期待値とすることにより、前記物理エンジンの管理下で前記第1領域のいずれかの位置に存在するオブジェクトに対して与える入力として、前記学習された入力を採用するか否かを決定する決定部
をさらに備えることを特徴とする請求項1から6のいずれか1項に記載の情報処理装置。 - 複数の領域に分割されたマップを参照する情報処理装置が実行する情報処理方法であって、
前記情報処理装置が、物理エンジンの管理下で、前記複数の領域のうち第1領域内の第1代表点に存在するオブジェクトを前記複数の領域のうち第2領域内の第2代表点に到達させるために、前記第1代表点において前記オブジェクトに対して与えるべき入力を学習する学習ステップ、
前記情報処理装置が、前記物理エンジンの管理下で、前記第1領域内の任意の位置に存在する前記オブジェクトに対して前記学習された入力を与えると、前記オブジェクトが前記第2領域内のいずれかの位置に到達する到達確率を算定する算定ステップ
を備えることを特徴とする情報処理方法。 - 複数の領域に分割されたマップを参照するコンピュータを、
物理エンジンの管理下で、前記複数の領域のうち第1領域内の第1代表点に存在するオブジェクトを前記複数の領域のうち第2領域内の第2代表点に到達させるために、前記第1代表点において前記オブジェクトに対して与えるべき入力を学習する学習部、
前記物理エンジンの管理下で、前記第1領域内の任意の位置に存在する前記オブジェクトに対して前記学習された入力を与えると、前記オブジェクトが前記第2領域内のいずれかの位置に到達する到達確率を算定する算定部
として機能させることを特徴とするプログラム。 - 請求項1から6のいずれか1項に記載された情報処理装置により学習された前記入力、ならびに、前記情報処理装置により算定された前記到達確率を、コンピュータ通信網、もしくは、非一時的なコンピュータ読取可能な情報記録媒体を介して取得する取得部、
前記第2領域に設定された有利度から前記第1領域に設定された有利度を減算して得られる差と、前記算定された到達確率と、の積を、前記第1領域のいずれかの位置に存在するオブジェクトに対して前記学習された入力を与えたときの利得の期待値とすることにより、前記物理エンジンの管理下で前記第1領域のいずれかの位置に存在するオブジェクトに対して与える入力として、前記学習された入力を採用するか否かを決定する決定部
を備えることを特徴とする端末。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017196334A JP6258552B1 (ja) | 2017-10-06 | 2017-10-06 | 情報処理装置、情報処理方法、プログラム、ならびに、端末 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017196334A JP6258552B1 (ja) | 2017-10-06 | 2017-10-06 | 情報処理装置、情報処理方法、プログラム、ならびに、端末 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6258552B1 true JP6258552B1 (ja) | 2018-01-10 |
| JP2019068948A JP2019068948A (ja) | 2019-05-09 |
Family
ID=60940239
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017196334A Expired - Fee Related JP6258552B1 (ja) | 2017-10-06 | 2017-10-06 | 情報処理装置、情報処理方法、プログラム、ならびに、端末 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6258552B1 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102160086B (zh) * | 2008-07-22 | 2016-04-27 | 黎明游戏有限责任公司 | 用于仿真中的物理交互的系统和方法 |
| JP5864406B2 (ja) * | 2012-12-18 | 2016-02-17 | 株式会社コナミデジタルエンタテインメント | ゲーム装置、ゲーム制御プログラム、及びゲーム制御装置 |
| JP5704770B2 (ja) * | 2013-11-25 | 2015-04-22 | 任天堂株式会社 | ゲーム装置、ゲームプログラム、ゲームシステム、および、ゲーム処理方法 |
| JP6081638B1 (ja) * | 2016-04-11 | 2017-02-15 | 株式会社コロプラ | ゲーム制御方法、および、ゲームプログラム |
| JP6190018B1 (ja) * | 2016-08-12 | 2017-08-30 | 株式会社コロプラ | ゲームの実行方法、プログラム、および記録媒体 |
-
2017
- 2017-10-06 JP JP2017196334A patent/JP6258552B1/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019068948A (ja) | 2019-05-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5887458B1 (ja) | プレイヤの移動履歴に基づいてノンプレイヤキャラクタの経路探索を行うゲームシステム等 | |
| KR101398086B1 (ko) | 온라인 게임에서의 유저 제스처 입력 처리 방법 | |
| JP6671901B2 (ja) | プログラム、ゲーム装置およびサーバシステム | |
| JP7456644B2 (ja) | マップ生成方法、装置、電子機器及びコンピュータ記憶媒体 | |
| JP2016539668A (ja) | 拡張現実装置、方法およびプログラム | |
| CN108211354A (zh) | 3d游戏场景中虚拟资源的生成方法及装置 | |
| JP5498437B2 (ja) | 情報処理装置、情報処理方法、情報処理プログラム、情報処理プログラムを記憶したコンピュータ読み取り可能な記録媒体、厚み領域設定装置、厚み領域設定方法、厚み領域設定プログラム、厚み領域設定プログラムを記憶したコンピュータ読み取り可能な記録媒体、仮想空間における面に関するデータ構造 | |
| CN112915542A (zh) | 一种碰撞数据处理方法、装置、计算机设备及存储介质 | |
| KR102310107B1 (ko) | 게임 콘텐츠 생성 방법 및 장치 | |
| US9259646B2 (en) | Object control device, computer readable storage medium storing object control program, and object control method | |
| CN111921195A (zh) | 三维场景的生成方法和装置、存储介质和电子装置 | |
| JP6258552B1 (ja) | 情報処理装置、情報処理方法、プログラム、ならびに、端末 | |
| KR102920229B1 (ko) | 게임 애플리케이션 환경 내 월드 예측 | |
| JP2019010338A5 (ja) | ||
| KR20190038730A (ko) | 가상의 크리켓 경기를 제어하는 제어 장치, 제어 방법 및 컴퓨터 프로그램 | |
| CN116966549A (zh) | 虚拟场景中瞄准点的确定方法、装置、设备及存储介质 | |
| KR101400536B1 (ko) | 온라인 게임 서비스에서의 캐릭터간 충격 반응 표시 방법 및 서버, 및 충격 반응 표시 기능을 가지는 온라인 게임 시스템 | |
| KR101400631B1 (ko) | 온라인 게임 서비스에서의 콤보 기술 구현 방법 및 서버, 및 콤보 기술 구현 기능을 가지는 온라인 게임 시스템 | |
| JP2013196648A (ja) | 情報処理装置、情報処理方法、プログラムおよびコンピュータ読取り可能な記憶媒体 | |
| JP6576544B2 (ja) | 情報処理装置、情報処理方法、コンピュータ読み取り可能な記憶媒体 | |
| KR20160146089A (ko) | 물리엔진이 적용된 시뮬레이션 방식의 게임프로그램 및 게임진행방법 | |
| KR101492248B1 (ko) | 온라인 게임에 출현하는 객체를 타겟팅하는 방법 및 장치. | |
| JP2010117900A (ja) | プログラム、情報記憶媒体、ポリゴンモデル生成装置、及びポリゴンモデル生成方法 | |
| WO2024199200A1 (zh) | 碰撞事件的确定方法、装置、存储介质、电子设备及程序产品 | |
| KR20190106096A (ko) | 온라인 게임의 퀘스트 생성 장치 및 그 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171006 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20171006 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20171114 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171206 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6258552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D04 |
|
| LAPS | Cancellation because of no payment of annual fees |