JP6237432B2 - ハイブリッド自動車の制御装置 - Google Patents
ハイブリッド自動車の制御装置 Download PDFInfo
- Publication number
- JP6237432B2 JP6237432B2 JP2014083829A JP2014083829A JP6237432B2 JP 6237432 B2 JP6237432 B2 JP 6237432B2 JP 2014083829 A JP2014083829 A JP 2014083829A JP 2014083829 A JP2014083829 A JP 2014083829A JP 6237432 B2 JP6237432 B2 JP 6237432B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- engine
- rotational speed
- torque
- upper limit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Description
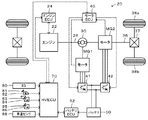
エンジンと、第1モータと、車軸に連結された駆動軸と前記エンジンの出力軸と前記第1モータの回転軸とに3つの回転要素が接続されたプラネタリギヤと、前記駆動軸に回転軸が接続された第2モータと、前記第1モータおよび前記第2モータと電力をやりとりするバッテリと、を備えるハイブリッド自動車の制御装置であって、
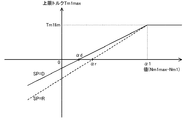
前記第1モータの過回転判定用回転数より低い範囲内で且つシフトポジションが後進走行用ポジションのときに前進走行用ポジションのときより高くなるように前記第1モータの上限回転数に設定し、
前記第1モータの回転数が前記上限回転数に接近したときに、該第1モータの回転数を前記上限回転数に対して低下させるように前記第1モータを制御し、
その低下量は、シフトポジションが後進走行用ポジションのときに、前進走行用ポジションのときより大きい、
ことを特徴とする。
Tm2tmp=Tr*+Tm1*/ρ (2)
Claims (1)
- エンジンと、第1モータと、車軸に連結された駆動軸と前記エンジンの出力軸と前記第1モータの回転軸とに3つの回転要素が接続されたプラネタリギヤと、前記駆動軸に回転軸が接続された第2モータと、前記第1モータおよび前記第2モータと電力をやりとりするバッテリと、を備えるハイブリッド自動車の制御装置であって、
前記第1モータの過回転判定用回転数より低い範囲内で且つシフトポジションが後進走行用ポジションのときに前進走行用ポジションのときより高くなるように前記第1モータの上限回転数を設定し、
前記第1モータの回転数が前記上限回転数に接近したときに、接近していないときに比して、前記第1モータの上限トルクを低下させることにより該第1モータの回転数を前記上限回転数に対して低下させるように前記第1モータを制御し、
更に、前記上限トルクの低下量は、シフトポジションが後進走行用ポジションのときに、前進走行用ポジションのときより大きい、
ことを特徴とするハイブリッド自動車の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014083829A JP6237432B2 (ja) | 2014-04-15 | 2014-04-15 | ハイブリッド自動車の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014083829A JP6237432B2 (ja) | 2014-04-15 | 2014-04-15 | ハイブリッド自動車の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015202815A JP2015202815A (ja) | 2015-11-16 |
| JP6237432B2 true JP6237432B2 (ja) | 2017-11-29 |
Family
ID=54596524
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014083829A Expired - Fee Related JP6237432B2 (ja) | 2014-04-15 | 2014-04-15 | ハイブリッド自動車の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6237432B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106515707B (zh) * | 2016-12-09 | 2018-12-18 | 中国矿业大学(北京) | 一种智能可选择恒速安全倒车装置 |
| JP7580218B2 (ja) * | 2020-07-30 | 2024-11-11 | 株式会社Subaru | 電動車両 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3514818B2 (ja) * | 1994-06-01 | 2004-03-31 | ヤンマー農機株式会社 | 無段変速式走行車輌の急発進防止機構 |
| JP4325732B2 (ja) * | 1999-03-29 | 2009-09-02 | トヨタ自動車株式会社 | ハイブリッド型の車両用駆動システム |
| JP2005044531A (ja) * | 2003-07-22 | 2005-02-17 | Daihatsu Motor Co Ltd | 燃料電池システム |
| JP2008265652A (ja) * | 2007-04-24 | 2008-11-06 | Toyota Motor Corp | ハイブリッド自動車およびその制御方法 |
| JP2012040928A (ja) * | 2010-08-18 | 2012-03-01 | Aisin Aw Co Ltd | ハイブリッド車両用制御装置 |
-
2014
- 2014-04-15 JP JP2014083829A patent/JP6237432B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015202815A (ja) | 2015-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6392653B2 (ja) | ハイブリッド自動車 | |
| JP6090273B2 (ja) | ハイブリッド自動車 | |
| US9139108B2 (en) | Control device and control method for electric powered vehicle | |
| CN107458370A (zh) | 混合动力汽车及用于混合动力汽车的控制方法 | |
| JP6156404B2 (ja) | ハイブリッド自動車 | |
| JP2014217112A (ja) | 車両の制御装置 | |
| JP5895353B2 (ja) | ハイブリッド車 | |
| JP6146292B2 (ja) | ハイブリッド自動車 | |
| JP6237432B2 (ja) | ハイブリッド自動車の制御装置 | |
| JP2011079444A (ja) | ハイブリッド自動車 | |
| JP2016060319A (ja) | ハイブリッド自動車 | |
| JP2015199411A (ja) | ハイブリッド車 | |
| JP6036546B2 (ja) | ハイブリッド自動車 | |
| JP6133721B2 (ja) | 自動車 | |
| JP5502702B2 (ja) | ハイブリッド自動車 | |
| JP5387487B2 (ja) | ハイブリッド自動車 | |
| JP2010208480A (ja) | ハイブリッド車両 | |
| JP2017178013A (ja) | ハイブリッド自動車 | |
| JP2014083853A (ja) | ハイブリッド車 | |
| JP2015107715A (ja) | ハイブリッド車両 | |
| JP2015202790A (ja) | ハイブリッド自動車 | |
| JP6269191B2 (ja) | ハイブリッド自動車 | |
| JP2015098217A (ja) | ハイブリッド自動車の制御装置 | |
| JP6747375B2 (ja) | ハイブリッド自動車 | |
| CN108528435A (zh) | 混合动力汽车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160516 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170328 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171016 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6237432 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |