JP6227165B2 - 画像処理装置及び車載表示システム及び表示装置及び画像処理方法及び画像処理プログラム - Google Patents
画像処理装置及び車載表示システム及び表示装置及び画像処理方法及び画像処理プログラム Download PDFInfo
- Publication number
- JP6227165B2 JP6227165B2 JP2016563338A JP2016563338A JP6227165B2 JP 6227165 B2 JP6227165 B2 JP 6227165B2 JP 2016563338 A JP2016563338 A JP 2016563338A JP 2016563338 A JP2016563338 A JP 2016563338A JP 6227165 B2 JP6227165 B2 JP 6227165B2
- Authority
- JP
- Japan
- Prior art keywords
- objects
- unit
- extraction unit
- image
- image processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 98
- 238000003672 processing method Methods 0.000 title claims description 4
- 238000000605 extraction Methods 0.000 claims description 115
- 241001465754 Metazoa Species 0.000 claims description 30
- 238000000034 method Methods 0.000 claims description 29
- 238000003384 imaging method Methods 0.000 claims description 19
- 239000000284 extract Substances 0.000 claims description 7
- 238000004148 unit process Methods 0.000 claims 1
- 238000013500 data storage Methods 0.000 description 21
- 241000282412 Homo Species 0.000 description 15
- 238000010586 diagram Methods 0.000 description 8
- 230000000694 effects Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 230000006399 behavior Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 238000004040 coloring Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000013598 vector Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 235000005282 vitamin D3 Nutrition 0.000 description 1
- 239000011647 vitamin D3 Substances 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/02—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof
- B60R11/0229—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof for displays, e.g. cathodic tubes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/23—Clustering techniques
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/762—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using clustering, e.g. of similar faces in social networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/307—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing virtually distinguishing relevant parts of a scene from the background of the scene
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Data Mining & Analysis (AREA)
- Multimedia (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- General Engineering & Computer Science (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Computational Biology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Databases & Information Systems (AREA)
- Computing Systems (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Psychiatry (AREA)
- Social Psychology (AREA)
- Human Computer Interaction (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Description
移動する対象物を少なくとも1つ含む複数の対象物を撮影した撮影画像から当該複数の対象物を抽出する抽出部と、
前記抽出部により抽出された複数の対象物の間の将来の距離を予測する予測部と、
前記予測部により予測された将来の距離に基づいて、前記抽出部により抽出された複数の対象物をグループに分類する分類部と、
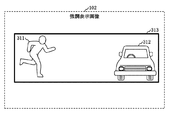
前記撮影画像を、前記分類部により分類された複数の対象物をグループごとに強調表示した強調表示画像に加工する処理部とを備える。
まず、本実施の形態の概要について説明する。
図1は、本実施の形態に係る車載表示システム100の構成を示すブロック図である。
図2は、本実施の形態に係る表示方法に相当する、車載表示システム100の動作を示すフローチャートである。図3は、対象物データ131の例を示す表である。
本実施の形態では、対象物の間の現在の距離Dcに関わらず、対象物の間の将来の距離Dfに基づいて、対象物がグループに分類される。このため、本実施の形態によれば、グループごとに強調表示される対象物について、別々に視認すべき対象物とまとめて視認すべき対象物とを適切に分類することが可能となる。
本実施の形態について、主に実施の形態1との差異を説明する。
本実施の形態に係る車載表示システム100の構成は、図1に示した実施の形態1のものと同じである。
以下、本実施の形態に係る表示方法に相当する、車載表示システム100の動作について、図2を用いて説明する。
本実施の形態では、過去に同じグループに分類されていた2つ以上の対象物のうち、少なくとも1つの対象物が残りの対象物と異なるグループに分類された場合に、強調表示の形式として当該少なくとも1つの対象物と当該残りの対象物とで異なる形式が用いられる。このため、本実施の形態によれば、他の対象物とまとめて視認していた対象物が個別に視認すべき対象物に変わったことを明示することが可能となる。
Claims (15)
- 移動する対象物を少なくとも1つ含む複数の対象物を撮影した撮影画像から当該複数の対象物を抽出する抽出部と、
前記抽出部により抽出された複数の対象物の間の将来の距離を予測する予測部と、
前記予測部により予測された将来の距離に基づいて、前記抽出部により抽出された複数の対象物をグループに分類する分類部と、
前記撮影画像を、前記分類部により分類された複数の対象物をグループごとに強調表示した強調表示画像に加工する処理部と
を備える画像処理装置。 - 前記分類部は、前記抽出部により抽出された複数の対象物のうち、前記予測部により予測された互いの間の将来の距離が閾値より大きい対象物を異なるグループに分類する、請求項1に記載の画像処理装置。
- 前記分類部は、前記抽出部により抽出された複数の対象物のうち、前記予測部により予測された互いの間の将来の距離が閾値より小さい対象物を同じグループに分類する、請求項1に記載の画像処理装置。
- 前記抽出部は、抽出した複数の対象物のそれぞれの種別を判定し、
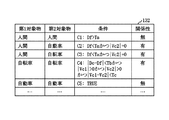
前記分類部は、前記予測部により予測された将来の距離と前記抽出部により判定された種別とに基づいて、前記抽出部により抽出された複数の対象物の間の関係性を推定し、推定した関係性によって当該複数の対象物をグループに分類する、請求項1に記載の画像処理装置。 - 前記抽出部は、種別が車両であると判定した対象物の現在の速度を推定し、
前記分類部は、前記抽出部により抽出された複数の対象物に、前記抽出部により種別が人間であると判定された第1対象物と、前記抽出部により種別が車両であると判定された第2対象物とが含まれ、前記予測部により予測された前記第1対象物と前記第2対象物との間の将来の距離が閾値より小さく、前記抽出部により推定された前記第2対象物の現在の速度の大きさが0である場合に、前記第1対象物と前記第2対象物とを同じグループに分類する、請求項4に記載の画像処理装置。 - 前記抽出部は、抽出した複数の対象物の間の現在の距離を算出するとともに、種別が移動する対象物であると判定した対象物の現在の速度を推定し、
前記分類部は、前記抽出部により抽出された複数の対象物に、前記抽出部により種別が移動する対象物であると判定された第1対象物と第2対象物とが存在し、前記抽出部により算出された前記第1対象物と前記第2対象物との間の現在の距離と、前記予測部により予測された前記第1対象物と前記第2対象物との間の将来の距離との差が閾値より小さく、前記抽出部により推定された前記第1対象物と前記第2対象物との現在の速度の大きさが0より大きく、前記抽出部により推定された前記第1対象物と前記第2対象物との現在の速度の大きさの差が他の閾値より小さい場合に、前記第1対象物と前記第2対象物とを同じグループに分類する、請求項4に記載の画像処理装置。 - 前記第1対象物及び前記第2対象物は、前記抽出部により種別が自転車であると判定された対象物である、請求項6に記載の画像処理装置。
- 前記抽出部は、種別が子供又は動物であると判定した対象物の動きの変化量を算出し、
前記分類部は、前記抽出部により抽出された複数の対象物に、前記抽出部により種別が人間であると判定された第1対象物と、前記抽出部により種別が子供又は動物であると判定された第2対象物とが含まれ、前記抽出部により算出された前記第2対象物の動きの変化量が閾値より大きい場合に、前記第1対象物と前記第2対象物とを異なるグループに分類する、請求項4に記載の画像処理装置。 - 前記処理部は、前記分類部により過去に同じグループに分類されていた2つ以上の対象物のうち、少なくとも1つの対象物が前記分類部により残りの対象物と異なるグループに分類された場合に、前記強調表示画像における強調表示の形式として当該少なくとも1つの対象物と当該残りの対象物とで異なる形式を用いる、請求項1から8のいずれか1項に記載の画像処理装置。
- 前記抽出部は、抽出した複数の対象物のそれぞれの種別を判定し、
前記予測部は、前記抽出部により種別が人間であると判定された対象物の姿勢が走り出す姿勢であるかどうかを判断し、判断結果に基づいて、前記抽出部により種別が人間であると判定された対象物と前記抽出部により抽出された他の対象物との間の将来の距離を予測する、請求項1から3のいずれか1項に記載の画像処理装置。 - 前記強調表示画像は、前記分類部により分類された複数の対象物をグループごとに1つの枠で囲んだ画像である、請求項1から10のいずれか1項に記載の画像処理装置。
- 請求項1から11のいずれか1項に記載の画像処理装置と、
車両に搭載され、前記車両の周辺を撮影して前記撮影画像を得る撮像装置と、
前記車両に搭載され、前記強調表示画像を出力する表示装置と
を備える車載表示システム。 - 移動する対象物を少なくとも1つ含む複数の対象物を撮影した撮影画像が加工されて得られる強調表示画像であって、予測された当該複数の対象物の間の将来の距離に基づいてグループに分類された当該複数の対象物をグループごとに強調表示した強調表示画像が入力される入力部と、
前記入力部に入力された強調表示画像を出力する出力部と
を備える表示装置。 - 抽出部が、移動する対象物を少なくとも1つ含む複数の対象物を撮影した撮影画像から当該複数の対象物を抽出し、
予測部が、前記抽出部により抽出された複数の対象物の間の将来の距離を予測し、
分類部が、前記予測部により予測された将来の距離に基づいて、前記抽出部により抽出された複数の対象物をグループに分類し、
処理部が、前記撮影画像を、前記分類部によりグループに分類された複数の対象物をグループごとに強調表示した強調表示画像に加工する画像処理方法。 - コンピュータに、
移動する対象物を少なくとも1つ含む複数の対象物を撮影した撮影画像から当該複数の対象物を抽出する抽出処理と、
前記抽出処理により抽出された複数の対象物の間の将来の距離を予測する予測処理と、
前記予測処理により予測された将来の距離に基づいて、前記抽出処理により抽出された複数の対象物をグループに分類する分類処理と、
前記撮影画像を、前記分類処理により分類された複数の対象物をグループごとに強調表示した強調表示画像に加工する画像処理と
を実行させる画像処理プログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2014/082679 WO2016092650A1 (ja) | 2014-12-10 | 2014-12-10 | 画像処理装置及び車載表示システム及び表示装置及び画像処理方法及び画像処理プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016092650A1 JPWO2016092650A1 (ja) | 2017-04-27 |
| JP6227165B2 true JP6227165B2 (ja) | 2017-11-08 |
Family
ID=56106901
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016563338A Active JP6227165B2 (ja) | 2014-12-10 | 2014-12-10 | 画像処理装置及び車載表示システム及び表示装置及び画像処理方法及び画像処理プログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10235768B2 (ja) |
| JP (1) | JP6227165B2 (ja) |
| CN (1) | CN107004363B (ja) |
| DE (1) | DE112014007249B4 (ja) |
| WO (1) | WO2016092650A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11371851B2 (en) * | 2018-12-21 | 2022-06-28 | Volkswagen Aktiengesellschaft | Method and system for determining landmarks in an environment of a vehicle |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017056385A1 (ja) * | 2015-09-29 | 2017-04-06 | ソニー株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| EP3358546A4 (en) | 2015-09-29 | 2019-05-01 | Sony Corporation | INFORMATION PROCESSING DEVICE, INFORMATION PROCESSING METHOD, AND PROGRAM |
| US10200581B2 (en) * | 2016-03-31 | 2019-02-05 | Peter G. Hartwell | Heads down intelligent display and processing |
| RU2714091C1 (ru) * | 2016-06-27 | 2020-02-11 | Ниссан Мотор Ко., Лтд. | Способ отслеживания объектов и устройство отслеживания объектов |
| CN118781305A (zh) * | 2017-03-17 | 2024-10-15 | 麦克赛尔株式会社 | Ar显示装置和ar显示方法 |
| US10000153B1 (en) * | 2017-08-31 | 2018-06-19 | Honda Motor Co., Ltd. | System for object indication on a vehicle display and method thereof |
| US10713940B2 (en) | 2017-10-31 | 2020-07-14 | Waymo Llc | Detecting and responding to traffic redirection for autonomous vehicles |
| AU2018358932B2 (en) | 2017-10-31 | 2020-12-03 | Waymo Llc | Semantic object clustering for autonomous vehicle decision making |
| US10401862B2 (en) * | 2017-10-31 | 2019-09-03 | Waymo Llc | Semantic object clustering for autonomous vehicle decision making |
| CN110110189A (zh) * | 2018-02-01 | 2019-08-09 | 北京京东尚科信息技术有限公司 | 用于生成信息的方法和装置 |
| GB201804195D0 (en) | 2018-03-15 | 2018-05-02 | Blue Vision Labs Uk Ltd | Visual vehicle tracking through noise and occlusions using crowd-sourced maps |
| US10497161B1 (en) * | 2018-06-08 | 2019-12-03 | Curious Company, LLC | Information display by overlay on an object |
| DE102018005561A1 (de) | 2018-07-09 | 2020-01-09 | AKO Vermittlungs- und Beratungsgesellschaft UG | Verfahren zur Verkehrsinformation |
| US10650600B2 (en) | 2018-07-10 | 2020-05-12 | Curious Company, LLC | Virtual path display |
| US10818088B2 (en) | 2018-07-10 | 2020-10-27 | Curious Company, LLC | Virtual barrier objects |
| WO2020026381A1 (ja) * | 2018-08-01 | 2020-02-06 | 楽天株式会社 | 警告装置、警告方法、プログラム、ならびに、非一時的なコンピュータ読取可能な情報記録媒体 |
| US10902678B2 (en) | 2018-09-06 | 2021-01-26 | Curious Company, LLC | Display of hidden information |
| JP7211674B2 (ja) * | 2018-09-27 | 2023-01-24 | 株式会社Subaru | 移動体監視装置、並びにこれを用いる車両制御システムおよび交通システム |
| JP7203563B2 (ja) * | 2018-10-29 | 2023-01-13 | 日立Astemo株式会社 | 移動体挙動予測装置 |
| US11055913B2 (en) | 2018-12-04 | 2021-07-06 | Curious Company, LLC | Directional instructions in an hybrid reality system |
| US10970935B2 (en) | 2018-12-21 | 2021-04-06 | Curious Company, LLC | Body pose message system |
| CN109624858B (zh) * | 2019-01-04 | 2021-02-02 | 斑马网络技术有限公司 | 外后视镜的图像显示方法及装置 |
| CN109886335B (zh) * | 2019-02-21 | 2021-11-26 | 厦门美图之家科技有限公司 | 分类模型训练方法及装置 |
| US10872584B2 (en) | 2019-03-14 | 2020-12-22 | Curious Company, LLC | Providing positional information using beacon devices |
| US11320830B2 (en) * | 2019-10-28 | 2022-05-03 | Deere & Company | Probabilistic decision support for obstacle detection and classification in a working area |
| JP7198232B2 (ja) * | 2020-01-28 | 2022-12-28 | 株式会社デンソー | 物体検出装置 |
| FR3107349B1 (fr) * | 2020-02-14 | 2022-01-14 | Amadeus Sas | Procédé et système de carte et de navigation assistées par caméra |
| JP7561535B2 (ja) | 2020-06-04 | 2024-10-04 | キヤノン株式会社 | 撮像装置及びその制御方法、プログラム、記憶媒体 |
| US11514618B2 (en) * | 2020-11-06 | 2022-11-29 | Adobe Inc. | Generation of object hierarchies for logical selection of groups of objects in vector designs |
| JP7347464B2 (ja) * | 2021-03-16 | 2023-09-20 | トヨタ自動車株式会社 | 画像処理装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3450189B2 (ja) | 1998-06-16 | 2003-09-22 | ダイハツ工業株式会社 | 歩行者検知システム及びその制御方法 |
| JP2006224740A (ja) | 2005-02-16 | 2006-08-31 | Advics:Kk | 車両用走行支援装置 |
| JP2007172541A (ja) | 2005-12-26 | 2007-07-05 | Toyota Motor Corp | 運転支援装置 |
| US7671725B2 (en) | 2006-03-24 | 2010-03-02 | Honda Motor Co., Ltd. | Vehicle surroundings monitoring apparatus, vehicle surroundings monitoring method, and vehicle surroundings monitoring program |
| WO2008029802A1 (fr) | 2006-09-04 | 2008-03-13 | Panasonic Corporation | Dispositif fournissant des informations de voyage |
| CN101681244B (zh) * | 2007-05-09 | 2012-02-29 | 松下电器产业株式会社 | 显示装置、显示方法、显示程序 |
| JP2009040107A (ja) | 2007-08-06 | 2009-02-26 | Denso Corp | 画像表示制御装置及び画像表示制御システム |
| JP5338273B2 (ja) | 2008-11-24 | 2013-11-13 | 株式会社デンソー | 画像生成装置、ヘッドアップディスプレイ装置および車両用表示装置 |
| JP5198346B2 (ja) * | 2009-04-23 | 2013-05-15 | 本田技研工業株式会社 | 車両周辺監視装置 |
| JP2011150475A (ja) | 2010-01-20 | 2011-08-04 | Toyota Motor Corp | 周辺監視装置 |
| CN102782740B (zh) * | 2010-03-01 | 2015-04-15 | 本田技研工业株式会社 | 车辆周围监测装置 |
| US9073484B2 (en) | 2010-03-03 | 2015-07-07 | Honda Motor Co., Ltd. | Surrounding area monitoring apparatus for vehicle |
| JP2012153256A (ja) | 2011-01-26 | 2012-08-16 | Toyota Motor Corp | 画像処理装置 |
| JP2012169826A (ja) | 2011-02-14 | 2012-09-06 | Fujitsu Ten Ltd | 画像処理装置、画像表示システム及び画像処理方法 |
| JP5533766B2 (ja) | 2011-04-05 | 2014-06-25 | 株式会社デンソー | 車両用表示装置 |
| JP5859741B2 (ja) * | 2011-04-15 | 2016-02-16 | トヨタ自動車株式会社 | 運転支援装置 |
| JP5895728B2 (ja) * | 2012-06-15 | 2016-03-30 | 株式会社デンソー | 車群管理装置 |
| KR101405583B1 (ko) * | 2012-10-30 | 2014-06-10 | 현대자동차주식회사 | 차량 속도 추정 장치 및 방법 |
| JP5578254B2 (ja) | 2013-05-14 | 2014-08-27 | 株式会社デンソー | 画像生成装置 |
-
2014
- 2014-12-10 WO PCT/JP2014/082679 patent/WO2016092650A1/ja active Application Filing
- 2014-12-10 US US15/514,187 patent/US10235768B2/en active Active
- 2014-12-10 JP JP2016563338A patent/JP6227165B2/ja active Active
- 2014-12-10 DE DE112014007249.4T patent/DE112014007249B4/de active Active
- 2014-12-10 CN CN201480083771.XA patent/CN107004363B/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11371851B2 (en) * | 2018-12-21 | 2022-06-28 | Volkswagen Aktiengesellschaft | Method and system for determining landmarks in an environment of a vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2016092650A1 (ja) | 2017-04-27 |
| CN107004363B (zh) | 2020-02-18 |
| CN107004363A (zh) | 2017-08-01 |
| US10235768B2 (en) | 2019-03-19 |
| DE112014007249T5 (de) | 2017-08-31 |
| WO2016092650A1 (ja) | 2016-06-16 |
| DE112014007249B4 (de) | 2022-11-03 |
| US20170301107A1 (en) | 2017-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6227165B2 (ja) | 画像処理装置及び車載表示システム及び表示装置及び画像処理方法及び画像処理プログラム | |
| Bila et al. | Vehicles of the future: A survey of research on safety issues | |
| CN107380164B (zh) | 基于计算机视觉的驾驶员辅助系统和支持系统 | |
| US9881221B2 (en) | Method and system for estimating gaze direction of vehicle drivers | |
| CN106611512B (zh) | 前车起步的处理方法、装置和系统 | |
| CN103448653B (zh) | 车辆碰撞报警系统和方法 | |
| EP3367363A1 (en) | Parking support method and parking support device | |
| EP3367365A1 (en) | Parking support information display method and parking support device | |
| CN105719311B (zh) | 用于检测目标的车辆系统及其操作方法 | |
| US20140354684A1 (en) | Symbology system and augmented reality heads up display (hud) for communicating safety information | |
| JP2009037622A (ja) | 画像を評価するための方法および装置 | |
| CN101269635A (zh) | 视场监视设备 | |
| US20190340448A1 (en) | Event prediction system, event prediction method, program, and recording medium having same recorded therein | |
| JP2007249841A (ja) | 画像認識装置 | |
| JP5267330B2 (ja) | 画像処理装置および方法 | |
| CN107924265B (zh) | 显示装置、显示方法以及存储介质 | |
| EP3681151A1 (en) | Image processing device, image processing method, and image display system | |
| WO2019193928A1 (ja) | 車両システム、空間領域推測方法及び空間領域推測装置 | |
| Rajendar et al. | Prediction of stopping distance for autonomous emergency braking using stereo camera pedestrian detection | |
| JP5811918B2 (ja) | 注視対象物推定装置、方法、及びプログラム | |
| Rill et al. | Collision avoidance using deep learning-based monocular vision | |
| US20120189161A1 (en) | Visual attention apparatus and control method based on mind awareness and display apparatus using the visual attention apparatus | |
| JP2013069045A (ja) | 画像認識装置、画像認識方法および画像認識プログラム | |
| JP7269694B2 (ja) | 事象発生推定のための学習データ生成方法・プログラム、学習モデル及び事象発生推定装置 | |
| Bhagat et al. | Driver gaze fixation and pattern analysis in safety critical events |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161031 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170912 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171010 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6227165 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |