JP6192483B2 - 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 - Google Patents
情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 Download PDFInfo
- Publication number
- JP6192483B2 JP6192483B2 JP2013217534A JP2013217534A JP6192483B2 JP 6192483 B2 JP6192483 B2 JP 6192483B2 JP 2013217534 A JP2013217534 A JP 2013217534A JP 2013217534 A JP2013217534 A JP 2013217534A JP 6192483 B2 JP6192483 B2 JP 6192483B2
- Authority
- JP
- Japan
- Prior art keywords
- virtual object
- marker
- image
- captured image
- information processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000010365 information processing Effects 0.000 title claims description 100
- 238000003672 processing method Methods 0.000 title claims description 4
- 238000001514 detection method Methods 0.000 claims description 90
- 238000003384 imaging method Methods 0.000 claims description 81
- 230000009471 action Effects 0.000 claims description 13
- 230000008859 change Effects 0.000 claims description 13
- 239000003550 marker Substances 0.000 description 373
- 238000000034 method Methods 0.000 description 120
- 230000008569 process Effects 0.000 description 112
- 238000012545 processing Methods 0.000 description 45
- 238000005259 measurement Methods 0.000 description 31
- 239000002131 composite material Substances 0.000 description 13
- 230000003190 augmentative effect Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 12
- 230000006870 function Effects 0.000 description 12
- 238000005516 engineering process Methods 0.000 description 11
- 230000000007 visual effect Effects 0.000 description 7
- 101100534512 Homo sapiens STMN1 gene Proteins 0.000 description 5
- 102100024237 Stathmin Human genes 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000008921 facial expression Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/222—Studio circuitry; Studio devices; Studio equipment
- H04N5/262—Studio circuits, e.g. for mixing, switching-over, change of character of image, other special effects ; Cameras specially adapted for the electronic generation of special effects
- H04N5/265—Mixing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/006—Mixed reality
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/222—Studio circuitry; Studio devices; Studio equipment
- H04N5/2224—Studio circuitry; Studio devices; Studio equipment related to virtual studio applications
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Graphics (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Processing Or Creating Images (AREA)
- User Interface Of Digital Computer (AREA)
Description
例えば、カードに印刷された2次元バーコードを用いる技術がある。この技術では、カメラの撮像画像からAR用のマーカとして2次元バーコードが識別され、該マーカに対応付けられた3次元画像データが2次元バーコードの位置に重畳して表示装置に表示される。
として機能させる情報処理プログラムである。
に富んだ拡張現実技術を提供することができる。
である。
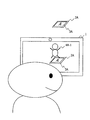
図1は、第1実施形態に係る情報処理システム100の構成の一例を示す図である。情報処理システム100には、情報処理装置1、カード2A、2Y(但し、カードの種類を区別しない場合には、単に「カード2」と称する)が含まれる。
13、補助記憶装置14、前面撮像装置15A、背面撮像装置15B、ディスプレイ(表示装置)16、および各種ボタンやタッチパネル等の入力装置17が電気的に接続された情報処理装置である。なお、情報処理装置1の具体的なハードウェア構成に関しては、実施の形態毎に適宜構成要素の省略や置換、追加が行われてよい。例えば、情報処理装置1が、据え置き型のゲーム装置である場合には、撮像装置、ディスプレイ16、入力装置17等はそれぞれ独立した装置であり、周辺装置として情報処理装置1に接続される。
及びデータを処理することで、RAM12、補助記憶装置14等の、情報処理装置1に備えられた各構成要素を制御する。また、RAM12は、主記憶装置であり、CPU11によって制御され、各種命令やデータが書き込まれ、読み出される。即ち、CPU11、RAM12、およびROM13は、情報処理装置1の制御部を構成する。
対して着脱可能に装着される可搬媒体が用いられてもよい。可搬媒体の例としては、EEPROM等によるメモリーカード、CD(Compact Disc)、DVD(Digital Versatile Disc)およびBD(Blu-ray(登録商標) Disc)等が挙げられる。可搬媒体による補助記憶装置14と、可搬型ではない補助記憶装置14とは、組み合わせて用いることも可能である。
いて、撮像画像内の対応付けられたマーカ3に対して所定位置に配置されて撮像画像に対して合成表示される。また、仮想オブジェクトは、上下、前後、および左右の方向を有する。そのため、マーカ3は、仮想オブジェクトの表示姿勢を特定することが可能なものであることが好ましい。即ち、マーカ3は、撮像装置15を用いて撮像されることで、撮像装置15に対する位置および姿勢を特定可能な記号、文字、図形、絵、およびそれらの組み合わせ等であることが好ましい。なお、第1実施形態において、姿勢は、直交する3軸によって構成される座標系において特定される。
されたかを判定することが可能となる。
含む仮想空間画像と、を重畳した合成画像を生成する。
次に、第1実施形態において実行される処理の流れを説明する。なお、第1実施形態に
係るフローチャートに示された処理の具体的な内容および処理順序は、本発明を実施するための一例である。具体的な処理内容および処理順序は、本発明の実施の形態毎に適宜選択されてよい。
5は、該当のマーカ3の計測経過時間を削除する。処理OP3において、処理対象のマーカ3の計測経過時間が記録されていない場合には、オブジェクト決定部25は、処理対象マーカ3の計測経過時間が第1の時間閾値未満である(OP3:NO)、と判定する。
第1実施形態の第1のAR処理では、マーカ3の認識状況に応じて、該マーカ3に対応する位置に配置される仮想オブジェクトが変化する。これによって、AR処理を視覚的変化に富んだエンターテイメント性の高いものとすることができる。
第1のAR処理では、マーカ3の前回の検出からの経過時間が第1の時間閾値以上第2の時間閾値未満の範囲内で今回の検出が発生する度に、マーカ3に基づく所定の位置に配置される仮想オブジェクトが変化する。これに代えて、マーカ3が連続して検出される時間又は回数に応じて、マーカ3に基づく所定の位置に配置される仮想オブジェクトが変化するようにしてもよい。
は、マーカ3の前回の検出からの計測経過時間が第1の時間閾値以上第2の時間閾値未満の範囲内での検出が発生する度に、該キャラクタの表情、服装などの外観が変化したり、該キャラクタの姿勢やポーズなどが変わったり、眠ったり走ったりという動作が変化したりしてもよい。
第2実施形態では、情報処理装置は、第2のAR処理を行う。第2のAR処理では、現実空間の撮像手段に応じて、表示される仮想オブジェクトが変化する。第2実施形態では、第1実施形態と重複する説明は省略される。
100内で用いられる全てのマーカ3について用意されていなくてもよい。例えば、オブジェクト決定部25は、前面カメラ15Aで撮像されて、前面カメラ対応情報に検出されたマーカ3の情報が保持されていない場合には、背面カメラ対応情報を参照して、仮想オブジェクトを決定する。ただし、これに限られず、前面カメラ対応情報が情報処理システム100内で用いられる全マーカ3について用意されており、背面カメラ対応情報は、全てのマーカ3について用意されていなくてもよい。または、背面カメラ対応情報及び前面カメラ対応情報のいずれも、全てのマーカ3について用意されていなくてもよい。撮像画像から検出されたマーカ3に該当する情報が、背面カメラ対応情報及び前面カメラ対応情報のいずれにもない場合には、該マーカ3に基づく所定の位置には仮想オブジェクトが表示されない。
図7は、第2のAR処理のフローチャートの一例である。図7に示されるフローチャートは、情報処理装置1において、AR機能を起動するユーザ操作が受け付けられたことを契機として開始される。
背面カメラ15Bが用いられることが多く、前面カメラ15Aを用いてARマーカを撮像することは少ない。そのため、前面カメラ15Aでマーカ3を撮像した際に、背面カメラ15Bで撮像している間には表示されなかった仮想オブジェクトが表示されることによって、該仮想オブジェクトを隠しキャラクタとしてユーザに提示することができ、ユーザに驚き、興奮等を与えることができる。
第2のAR処理では、マーカ3の検出手段が前面カメラ15A、背面カメラ15Bのいずれであるかによって、該マーカ3に対応する位置に配置される仮想オブジェクトが変化する。これによって、AR処理を視覚的変化に富んだエンターテイメント性の高いものとすることができる。
第2のAR処理では、前面カメラ15A、背面カメラ15Bのいずれで撮像されたかによって、マーカ3に基づく所定の位置に配置される仮想オブジェクトが変化する。前面カメラ15A、背面カメラ15Bが、それぞれ複数備えられる場合には、各撮像装置について対応情報を用意することで、いずれの撮像装置で撮像されたかによって、マーカ3に対応する位置に表示される仮想オブジェクトを切り替えることができる。例えば、立体視用に、背面カメラ15Bが、右目用カメラと左目用カメラとを備える場合に、右目用カメラ対応情報と、左目用カメラ対応情報とを用意することで、右目用カメラで撮像された場合と、左目用カメラで撮像された場合とで、マーカ3に基づく所定の位置に表示される仮想オブジェクトを切り替えることができる。
処理、すなわち、撮像画像からのマーカ検出の処理、表示基準情報の更新を無効にすることによって達成される。これによって、前面カメラ15Aでマーカ3を撮像した場合に表示される仮想オブジェクトを、背面カメラ15Bで撮像することができる。また、同様にして、背面カメラ15Bでマーカ3を撮像した場合に表示される仮想オブジェクトを、前面カメラ15Aで撮像することも可能である。
第3実施形態では、情報処理装置1は、第3のAR処理を実行する。第3のAR処理では、基準マーカ3Yが検出されることによって、基準マーカ3Y以外の検出されたマーカ3に関連付けられていた仮想オブジェクトが、基準マーカ3Yに関連付けられる。第3実施形態では、第1、第2実施形態と重複する説明は省略される。
図10A及び図10Bは、第3のAR処理のフローチャートの一例である。図10A及び図10Bに示されるフローチャートは、情報処理装置1において、AR機能を起動するユーザ操作が受け付けられたことを契機として開始される。
情報の初期状態は、空である。次に処理がOP33に進む。
第3のAR処理では、基準マーカ3Yとノーマルマーカ3とがともに検出されることによって、ノーマルマーカ3に関連付けられる仮想オブジェクトが基準マーカ3Yに関連付けられる。これによって、AR処理を視覚的変化に富んだエンターテイメント性の高いものとすることができる。
第3のAR処理において、基準マーカ3Yに基づく仮想オブジェクトの配置ポイントがあらかじめ複数設定されており、ノーマルマーカ3に基づく所定の位置に配置される仮想オブジェクトに、最寄りの配置ポイントに移動させる命令を実行させるようにしてもよい。すでに、最寄りの配置ポイントに別の仮想オブジェクトが配置されている場合には、空いている配置ポイントのうちノーマルマーカ3に基づく所定の位置に最も近い配置ポイントに移動させるようにする。また、ノーマルマーカ3に基づく所定の位置に配置される仮想オブジェクトが最寄りの配置ポイントへ移動中に、撮像画像内での基準マーカ3Yの位置が変わり、移動先であった最寄りの配置ポイントも移動した場合には、新たに仮想オブジェクトから最寄りの配置ポイントを検出して、該検出した配置ポイントを該仮想オブジェクトの移動先としてもよい。仮想オブジェクトの制御は、例えば、専用のプログラムによって行われており、該プログラムに最寄りの配置ポイントに移動させる命令を実行させる。
、所定時間経過後に行われてもよい。
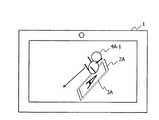
第4実施形態では、情報処理装置は、第4のAR処理を行う。第4のAR処理では、マーカ3の姿勢に応じて、表示される仮想オブジェクトの態様が変化する。第4実施形態では、第1〜第3実施形態と重複する説明は省略される。
。
第4実施形態では、検出されたマーカ3の姿勢に応じて、表示される仮想オブジェクトの態様が変化する。これによって、視覚的変化に富んだAR処理を提供することができる。また、ユーザに対して、マーカ3の姿勢変化への探究心を煽ることができる。
上記説明した実施形態において、表示制御部27は、撮像画像に仮想空間の画像を重畳
した合成画像を表示装置に表示させることで、ユーザが、仮想空間の画像が現実空間に重畳されて視認可能とする。但し、表示制御部27は、仮想空間の画像が現実空間に重畳されてユーザから視認されるように、表示装置に画像を表示させればよく、合成画像を表示する方式に限定されない。例えば、本発明は、HUD(Head−Up Display)や、ユーザが装着しているメガネに仮想空間画像を映写する方式等、ユーザの視界に仮想空間画像を映写することで仮想空間の画像が現実空間に重畳されてユーザから視認されるタイプの拡張現実技術に適用されてもよい。
2A、2Y カード
3A、3Y マーカ
21 撮像画像取得部
22 特徴検出部
23 姿勢検出部
24 表示基準情報記憶部
25 オブジェクト決定部
26 画像生成部
27 表示制御部
Claims (10)
- 撮像手段として同一の筐体に複数のカメラを備えるコンピュータを、
現実空間の撮像画像を取得する画像取得手段と、
前記撮像画像から特徴を検出する特徴検出手段と、
前記撮像画像が取得された際の前記撮像手段の状況として、前記撮像画像が前記複数のカメラのいずれによって撮像されたかに応じて、仮想オブジェクト又は仮想オブジェクトと該仮想オブジェクトの態様とを決定する決定手段と、
前記決定された仮想オブジェクト又は前記決定された態様の仮想オブジェクトが前記特徴に基づいて配置された仮想空間の画像を生成する画像生成手段と、
前記仮想空間の画像が現実空間に重畳されてユーザから視認されるように、表示装置に画像を表示させる表示制御手段と、
として機能させる情報処理プログラム。 - 前記コンピュータは、表示装置を同一の筐体に備え、
前記複数のカメラの一部は、前記表示装置の表示画面と略同一の面に備えられ、
前記複数のカメラの他の一部は、前記表示装置の表示画面と略同一の面以外の面に備えられ、
前記決定手段は、前記撮像画像が取得された際の前記撮像手段の状況として、当該撮像画像が、前記表示画面と略同一の面に備えられているカメラによる撮像画像であるか、前記表示画面と略同一の面以外の面に備えられているカメラによる撮像画像であるかによって、仮想オブジェクト又は仮想オブジェクトと該仮想オブジェクトの態様とを決定する、請求項1に記載の情報処理プログラム。 - 前記複数のカメラの前記一部と、前記他の一部とは、前記コンピュータの姿勢を基準にした撮像方向が略逆方向である、
請求項2に記載の情報処理プログラム。 - 前記決定手段は、前記撮像画像が取得された際の前記撮像画像の撮像手段の状況として、前記撮像画像の撮像手段の変化に応じて、仮想オブジェクト又は仮想オブジェクトと該仮想オブジェクトの態様とを変化させる、
請求項1に記載の情報処理プログラム。 - 前記仮想オブジェクトの前記態様は、該仮想オブジェクトの外観で定義される、
請求項1から4のいずれか一項に記載の情報処理プログラム。 - 前記仮想オブジェクトの前記態様は、該仮想オブジェクトの姿勢で定義される、
請求項1から5のいずれか一項に記載の情報処理プログラム。 - 前記仮想オブジェクトの前記態様は、該仮想オブジェクトに実行させる動作で定義される、
請求項1から6のいずれか一項に記載の情報処理プログラム。 - 撮像手段としての複数のカメラと、
現実空間の撮像画像を取得する画像取得手段と、
前記撮像画像から特徴を検出する特徴検出手段と、
前記撮像画像が取得された際の前記撮像手段の状況として、前記撮像画像が前記複数のカメラのいずれによって撮像されたかに応じて、仮想オブジェクト又は仮想オブジェクトと該仮想オブジェクトの態様とを決定する決定手段と、
前記決定された仮想オブジェクト又は前記決定された態様の仮想オブジェクトが前記特徴に基づいて配置された仮想空間の画像を生成する画像生成手段と、
前記仮想空間の画像が現実空間に重畳されてユーザから視認されるように、表示装置に画像を表示させる表示制御手段と、
を備える情報処理装置。 - コンピュータと、
撮像手段として同一の筐体に備えられる複数のカメラと、
表示装置と、
現実空間に配置された特徴と、
を含む情報処理システムであって、
前記コンピュータは、
前記現実空間の撮像画像を取得する画像取得手段と、
前記撮像画像から前記特徴を検出する特徴検出手段と、
前記撮像画像が取得された際の前記撮像手段の状況として、前記撮像画像が前記複数のカメラのいずれによって撮像されたかに応じて、仮想オブジェクト又は仮想オブジェクトと該仮想オブジェクトの態様とを決定する決定手段と、
前記決定された仮想オブジェクト又は前記決定された態様の仮想オブジェクトが前記特徴に基づいて配置された仮想空間の画像を生成する画像生成手段と、
前記仮想空間の画像が現実空間に重畳されてユーザから視認されるように、前記表示装置に画像を表示させる表示制御手段と、
を含む情報処理システム。 - 撮像手段として複数のカメラを備えるコンピュータが、
現実空間の撮像画像を取得し、
前記撮像画像から特徴を検出し、
前記撮像画像が取得された際の前記撮像手段の状況として、前記撮像画像が前記複数のカメラのいずれによって撮像されたかに応じて、仮想オブジェクト又は仮想オブジェクトと該仮想オブジェクトの態様と、を決定し、
前記決定された仮想オブジェクト又は前記決定された態様の仮想オブジェクトが前記特徴に基づいて配置された仮想空間の画像を生成し、
前記仮想空間の画像が現実空間に重畳されてユーザから視認されるように、表示装置に画像を表示させる、
情報処理方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013217534A JP6192483B2 (ja) | 2013-10-18 | 2013-10-18 | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 |
| US14/270,726 US9602740B2 (en) | 2013-10-18 | 2014-05-06 | Computer-readable recording medium recording information processing program, information processing apparatus, information processing system, and information processing method for superimposing a virtual image on a captured image of real space |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013217534A JP6192483B2 (ja) | 2013-10-18 | 2013-10-18 | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015079444A JP2015079444A (ja) | 2015-04-23 |
| JP2015079444A5 JP2015079444A5 (ja) | 2016-11-10 |
| JP6192483B2 true JP6192483B2 (ja) | 2017-09-06 |
Family
ID=52825865
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013217534A Active JP6192483B2 (ja) | 2013-10-18 | 2013-10-18 | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9602740B2 (ja) |
| JP (1) | JP6192483B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI755768B (zh) * | 2019-11-29 | 2022-02-21 | 大陸商北京市商湯科技開發有限公司 | 圖像處理方法、圖像處理設備及儲存介質 |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140067869A1 (en) * | 2012-08-30 | 2014-03-06 | Atheer, Inc. | Method and apparatus for content association and history tracking in virtual and augmented reality |
| TWI533240B (zh) * | 2014-12-31 | 2016-05-11 | 拓邁科技股份有限公司 | 資料顯示方法及系統,及相關電腦程式產品 |
| US20170061700A1 (en) * | 2015-02-13 | 2017-03-02 | Julian Michael Urbach | Intercommunication between a head mounted display and a real world object |
| US9934594B2 (en) * | 2015-09-09 | 2018-04-03 | Spell Disain Ltd. | Textile-based augmented reality systems and methods |
| JP5988286B1 (ja) * | 2016-04-01 | 2016-09-07 | 株式会社Cygames | プログラム及び画像処理装置 |
| JP2018078475A (ja) * | 2016-11-10 | 2018-05-17 | 富士通株式会社 | 制御プログラム、制御方法および制御装置 |
| US9754397B1 (en) * | 2017-04-07 | 2017-09-05 | Mirage Worlds, Inc. | Systems and methods for contextual augmented reality sharing and performance |
| CN109218630B (zh) * | 2017-07-06 | 2022-04-12 | 腾讯科技(深圳)有限公司 | 一种多媒体信息处理方法及装置、终端、存储介质 |
| US10504288B2 (en) | 2018-04-17 | 2019-12-10 | Patrick Piemonte & Ryan Staake | Systems and methods for shared creation of augmented reality |
| US10812736B2 (en) * | 2018-12-24 | 2020-10-20 | Polarr, Inc. | Detected object based image and video effects selection |
| US11816757B1 (en) * | 2019-12-11 | 2023-11-14 | Meta Platforms Technologies, Llc | Device-side capture of data representative of an artificial reality environment |
| CN111866391B (zh) * | 2020-07-30 | 2022-07-22 | 努比亚技术有限公司 | 一种视频拍摄方法、设备及计算机可读存储介质 |
| US11361519B1 (en) | 2021-03-29 | 2022-06-14 | Niantic, Inc. | Interactable augmented and virtual reality experience |
| JP2023091953A (ja) * | 2021-12-21 | 2023-07-03 | 株式会社セガ | プログラム及び情報処理装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000322602A (ja) | 1999-05-12 | 2000-11-24 | Sony Corp | 画像処理装置および方法、並びに媒体 |
| JP2006260602A (ja) * | 2006-06-13 | 2006-09-28 | Sony Computer Entertainment Inc | 画像処理装置 |
| JP4804256B2 (ja) * | 2006-07-27 | 2011-11-02 | キヤノン株式会社 | 情報処理方法 |
| JP2011203824A (ja) * | 2010-03-24 | 2011-10-13 | Sony Corp | 画像処理装置、画像処理方法及びプログラム |
| US8384770B2 (en) * | 2010-06-02 | 2013-02-26 | Nintendo Co., Ltd. | Image display system, image display apparatus, and image display method |
| JP5646263B2 (ja) * | 2010-09-27 | 2014-12-24 | 任天堂株式会社 | 画像処理プログラム、画像処理装置、画像処理システム、および、画像処理方法 |
| JP5738569B2 (ja) * | 2010-10-15 | 2015-06-24 | 任天堂株式会社 | 画像処理プログラム、装置、システムおよび方法 |
| JP5827007B2 (ja) * | 2010-10-15 | 2015-12-02 | 任天堂株式会社 | ゲームプログラム、画像処理装置、画像処理システム、および画像処理方法 |
| JP5948842B2 (ja) * | 2011-12-14 | 2016-07-06 | ソニー株式会社 | 情報処理装置、情報処理方法およびプログラム |
-
2013
- 2013-10-18 JP JP2013217534A patent/JP6192483B2/ja active Active
-
2014
- 2014-05-06 US US14/270,726 patent/US9602740B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI755768B (zh) * | 2019-11-29 | 2022-02-21 | 大陸商北京市商湯科技開發有限公司 | 圖像處理方法、圖像處理設備及儲存介質 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015079444A (ja) | 2015-04-23 |
| US20150109481A1 (en) | 2015-04-23 |
| US9602740B2 (en) | 2017-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6192483B2 (ja) | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 | |
| JP6202981B2 (ja) | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 | |
| JP6202980B2 (ja) | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 | |
| US10796467B2 (en) | Systems and methods for utilizing a living entity as a marker for augmented reality content | |
| JP5697487B2 (ja) | 画像処理システム、画像処理方法、画像処理装置、および画像処理用プログラム | |
| JP7079231B2 (ja) | 情報処理装置及び情報処理システム及び制御方法、プログラム | |
| JP6224327B2 (ja) | 情報処理システム、情報処理装置、情報処理方法、および情報処理用プログラム | |
| JP6021592B2 (ja) | 情報処理用プログラム、情報処理装置、情報処理システム、および情報処理方法 | |
| US9064335B2 (en) | System, method, device and computer-readable medium recording information processing program for superimposing information | |
| EP2491989A2 (en) | Information processing system, information processing method, information processing device and information processing program | |
| CN111610998A (zh) | Ar场景内容的生成方法、展示方法、装置及存储介质 | |
| JP2012178069A (ja) | 情報処理プログラム、情報処理方法、情報処理装置、及び情報処理システム | |
| US9478068B2 (en) | Computer-readable medium, image processing device, image processing system, and image processing method | |
| JP2016122392A (ja) | 情報処理装置、情報処理システム、その制御方法及びプログラム | |
| JP6283168B2 (ja) | 情報保持媒体および情報処理システム | |
| KR101308184B1 (ko) | 윈도우 형태의 증강현실을 제공하는 장치 및 방법 | |
| JP6099448B2 (ja) | 画像処理用プログラム、情報処理装置、情報処理システム、および画像処理方法 | |
| JP6514386B1 (ja) | プログラム、記録媒体及び画像生成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160921 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170613 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170703 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170711 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170808 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6192483 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |