JP6185929B2 - Mpiにおけるバックグラウンド信号の除去 - Google Patents
Mpiにおけるバックグラウンド信号の除去 Download PDFInfo
- Publication number
- JP6185929B2 JP6185929B2 JP2014546723A JP2014546723A JP6185929B2 JP 6185929 B2 JP6185929 B2 JP 6185929B2 JP 2014546723 A JP2014546723 A JP 2014546723A JP 2014546723 A JP2014546723 A JP 2014546723A JP 6185929 B2 JP6185929 B2 JP 6185929B2
- Authority
- JP
- Japan
- Prior art keywords
- field
- selection
- coil
- magnetic
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005291 magnetic effect Effects 0.000 claims description 151
- 238000005259 measurement Methods 0.000 claims description 80
- 239000006249 magnetic particle Substances 0.000 claims description 57
- 230000005415 magnetization Effects 0.000 claims description 49
- 238000000034 method Methods 0.000 claims description 41
- 238000001514 detection method Methods 0.000 claims description 29
- 239000000696 magnetic material Substances 0.000 claims description 21
- 238000009826 distribution Methods 0.000 claims description 17
- 230000008859 change Effects 0.000 claims description 15
- 238000001228 spectrum Methods 0.000 claims description 8
- 230000000007 visual effect Effects 0.000 claims description 7
- 238000004590 computer program Methods 0.000 claims description 6
- 230000000295 complement effect Effects 0.000 claims description 3
- 238000011017 operating method Methods 0.000 claims 1
- 238000007689 inspection Methods 0.000 description 30
- 230000006870 function Effects 0.000 description 22
- 238000012545 processing Methods 0.000 description 15
- 230000004907 flux Effects 0.000 description 14
- 238000003384 imaging method Methods 0.000 description 12
- 239000000463 material Substances 0.000 description 11
- 238000002059 diagnostic imaging Methods 0.000 description 10
- 239000002245 particle Substances 0.000 description 10
- 230000007423 decrease Effects 0.000 description 9
- 229920006395 saturated elastomer Polymers 0.000 description 8
- 230000008901 benefit Effects 0.000 description 7
- 238000012937 correction Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 238000004088 simulation Methods 0.000 description 7
- 239000002122 magnetic nanoparticle Substances 0.000 description 6
- 238000013461 design Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 238000009499 grossing Methods 0.000 description 5
- 239000010410 layer Substances 0.000 description 5
- 238000002595 magnetic resonance imaging Methods 0.000 description 5
- 229910002555 FeNi Inorganic materials 0.000 description 4
- 229910045601 alloy Inorganic materials 0.000 description 4
- 239000000956 alloy Substances 0.000 description 4
- 238000001816 cooling Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000005284 excitation Effects 0.000 description 4
- 230000006698 induction Effects 0.000 description 4
- 230000005855 radiation Effects 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 230000003595 spectral effect Effects 0.000 description 4
- 230000036962 time dependent Effects 0.000 description 4
- 229910005347 FeSi Inorganic materials 0.000 description 3
- 241001465754 Metazoa Species 0.000 description 3
- 238000005481 NMR spectroscopy Methods 0.000 description 3
- 238000004422 calculation algorithm Methods 0.000 description 3
- 239000004020 conductor Substances 0.000 description 3
- 239000010949 copper Substances 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 3
- 229910052734 helium Inorganic materials 0.000 description 3
- 239000001307 helium Substances 0.000 description 3
- SWQJXJOGLNCZEY-UHFFFAOYSA-N helium atom Chemical compound [He] SWQJXJOGLNCZEY-UHFFFAOYSA-N 0.000 description 3
- 238000013178 mathematical model Methods 0.000 description 3
- 229910000889 permalloy Inorganic materials 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 229910002546 FeCo Inorganic materials 0.000 description 2
- 229910052688 Gadolinium Inorganic materials 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 2
- 239000002872 contrast media Substances 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 239000003814 drug Substances 0.000 description 2
- 229940079593 drug Drugs 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000700 radioactive tracer Substances 0.000 description 2
- 239000000243 solution Substances 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 229910052692 Dysprosium Inorganic materials 0.000 description 1
- 206010020843 Hyperthermia Diseases 0.000 description 1
- 229910001030 Iron–nickel alloy Inorganic materials 0.000 description 1
- 241000218737 Mycobacterium phage Power Species 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- 229910000993 Vacoflux 48 Inorganic materials 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 239000002253 acid Substances 0.000 description 1
- 150000007513 acids Chemical class 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 239000011247 coating layer Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 239000012809 cooling fluid Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000001066 destructive effect Effects 0.000 description 1
- 238000002405 diagnostic procedure Methods 0.000 description 1
- 239000003302 ferromagnetic material Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000036031 hyperthermia Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 239000002105 nanoparticle Substances 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000009747 swallowing Effects 0.000 description 1
- 238000003325 tomography Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/12—Measuring magnetic properties of articles or specimens of solids or fluids
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/72—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/0515—Magnetic particle imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7203—Signal processing specially adapted for physiological signals or for diagnostic purposes for noise prevention, reduction or removal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/12—Measuring magnetic properties of articles or specimens of solids or fluids
- G01R33/1276—Measuring magnetic properties of articles or specimens of solids or fluids of magnetic particles, e.g. imaging of magnetic nanoparticles
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2576/00—Medical imaging apparatus involving image processing or analysis
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- General Physics & Mathematics (AREA)
- Pathology (AREA)
- Chemical & Material Sciences (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Signal Processing (AREA)
- Radiology & Medical Imaging (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Artificial Intelligence (AREA)
- Nanotechnology (AREA)
- Psychiatry (AREA)
- Physiology (AREA)
- Biochemistry (AREA)
- Electrochemistry (AREA)
- Analytical Chemistry (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Immunology (AREA)
- Quality & Reliability (AREA)
- Theoretical Computer Science (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
- Investigating Or Analyzing Materials By The Use Of Magnetic Means (AREA)
- Measuring Magnetic Variables (AREA)
Description
特許文献2は、無磁場点を有する傾斜磁場を生成する磁石、無磁場点内に高周波磁場を生成する励起場電磁石、励起場に対する無磁場点内の磁気粒子の応答を検出する高Q受信コイルを備える磁気粒子画像装置を開示する。磁場変換電磁石は、作像領域をスキャニングにより走査可能にし、スキャニング時間、スキャニング電力、増幅器加熱、SAR、dB/dt、および/またはスルーレートを最適化する、視野域を通じて無磁場点を移動させる均一な磁場を生成する。効果的な多重解像度のスキャニング技術もまた、提供する。相互変調された低および高周波数励起信号が処理され、作像領域内で磁気ナノ粒子の分布の画像を生成する。単一の合成画像は、異なる調波で複数の信号の逆重畳積分を使用して算出される。
磁気粒子の磁化が飽和状態とならない低い磁場強度を有する第1のサブゾーンおよび磁気粒子の磁化が飽和状態に達する磁場強度であるより高い磁場強度を有する第2のサブゾーンが視野域内に形成されるように、空間内での磁場強度の分布パターンを有する選択磁場を生成するための、選択場信号生成器ユニットおよび選択場要素を備える選択手段と、
磁気材料の磁化が局所的に変化するよう、磁気駆動場によって視野域内の前記2つのサブゾーンの空間内における位置を変化させるための、駆動場信号生成器ユニットおよび駆動場コイルを備える駆動手段と、
検出信号を取得するために、少なくとも1つの信号受信ユニットおよび少なくとも1つの受信コイルを備える受信手段であって、検出信号は視野域内の磁化状態に左右され、前記磁化状態は第1および第2のサブゾーンの空間内における位置の変化によって影響される、受信手段と、
検出信号からの視野域の画像を再構成する再構成手段であって、前記検出信号のスペクトルが複数の周波数成分を含み、前記周波数成分の1つまたは複数が、バックグラウンド信号の測定結果から取得された周波数成分の特定の信号品質ファクタを使用することで選択および/または重み付けされ、前記選択および/または重み付けされた周波数成分のみが、画像の再構成に使用される、再構成手段とを備える。
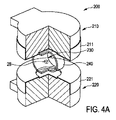
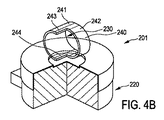
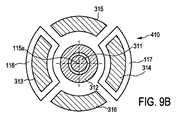
i)磁気粒子の磁化が飽和状態とならない低い磁場強度を有する第1のサブゾーンと、磁気粒子の磁化が飽和状態に達する磁場強度であるより高い磁場強度を有する第2のサブゾーンとが視野域内に形成されるように、磁場強度の空間内における分布パターンを有する磁気選択−収束場を生成し、検査領域内の視野域の空間内における位置を変更するための選択−収束手段であって、前記選択−収束手段は、少なくとも1組の選択−収束場コイル、および前記磁気選択−収束場の生成を制御するための前記少なくとも1組の選択−収束場コイルに設けられる選択−収束場電流を生成するための選択−収束場生成器ユニットを備える選択−収束手段を備え、
前記少なくとも1組の選択−収束場コイルは、
内側コイル軸の周りの閉ループとして形成される、少なくとも1つの内側選択−収束場コイルと、
前記少なくとも1つの内側選択−収束場コイルよりも前記内側コイル軸から大きな距離で、異なる角度位置で配置され、それぞれが関連する外側コイル軸の周りに閉ループを形成する少なくとも2つの外側選択−収束場コイルのグループとを備え、
本装置はさらに、
ii)磁気材料の磁化が局所的に変化するよう、駆動磁場によって視野域内における前記2つのサブゾーンの空間内における位置および/またはサイズを変化させるための、駆動場信号生成器ユニットおよび駆動場コイルを備える駆動手段と、
iii)検出信号を取得するための、少なくとも1つの信号受信ユニットおよび少なくとも1つの受信コイルを備える受信手段であって、前記検出信号は視野域内の磁化状態に左右され、前記磁化状態は第1および第2のサブゾーンの空間内における位置の変化によって影響される、受信手段と、
iv)検出信号からの視野域の画像を再構成する再構成手段であって、前記検出信号のスペクトルが複数の周波数成分を含み、前記周波数成分の1つまたは複数が、バックグラウンド信号の測定結果から取得された周波数成分の特定の信号品質ファクタを使用することで選択および/または重み付けされ、前記選択および/または重み付けされた周波数成分のみが、画像の再構成に使用される、再構成手段と
を備える。
i1)選択−収束場コイルから成る第1の組、
i2)選択−収束場コイルの少なくとも1つから成る第2の組、
i3)前記磁気選択−収束場の生成を制御するための選択−収束場コイルの前記第1および第2の組に与えられる選択−収束場電流を生成するための選択−収束場生成器、
を備える。好ましくは、検査領域が少なくとも1つの側からアクセス可能である場合には、選択−収束場コイルの前記第1の組よりも、検査領域の反対側に配置された選択−収束場コイルの第2の組の1つの方が、結果として装置内で使用されることとなる。これにより、例えば、搬送用ベッドから、検査領域内に配置された検査寝台に患者を単純に移すことによって、検査領域内での患者の位置決めを容易にすることが可能となる。これにより、検査領域周辺において、同軸上に多くのコイルを配置する必要も無くなり、その結果、検査領域は、トンネル型を有し、そのトンネル内で、患者は、従来のMRIスキャナ内で移動させられる際ように移動させられる。したがって、患者は、従来のMRIスキャナ内よりも、不快さを感じることが少なくなるだろう。

Claims (14)
- 視野域内の磁気粒子を検出するための装置であって、前記装置は、
前記磁気粒子の磁化が飽和状態に達しない低い磁場強度を有する第1のサブゾーンおよび前記磁気粒子の前記磁化が飽和状態に達する強度であるより高い磁場強度を有する第2のサブゾーンが前記視野域内に形成されるように磁場強度の空間内における分布パターンを有する選択磁場を生成するための、選択場信号生成器ユニットおよび選択場要素を備える選択手段と、
磁気材料の前記磁化が局所的に変化するよう、磁気駆動場によって前記視野域内の前記2つのサブゾーンの空間内における位置を変化させるための、駆動場信号生成器ユニットおよび駆動場コイルを備える駆動手段と、
検出信号を取得するための、少なくとも1つの信号受信ユニットおよび少なくとも1つの受信コイルを備える受信手段であって、検出信号は前記視野域内の前記磁化の状態に左右され、前記磁化の状態は前記第1のサブゾーンおよび前記第2のサブゾーンの空間内における前記位置の前記変化によって影響される、受信手段と、
検出信号からの前記視野域の画像を再構成する再構成手段であって、前記検出信号のスペクトルが複数の周波数成分を含み、前記周波数成分の1つまたは複数が、バックグラウンド信号測定から取得された周波数成分の特定の信号品質ファクタを使用することにより選択されおよび/または重み付けされ、前記選択されおよび/または重み付けされた周波数成分のみが、前記画像の再構成に使用される、再構成手段と、
を備える、装置。 - 前記再構成手段は、信号品質閾値を使用することにより、周波数成分を選択するように適合され、それらの周波数成分のみが、前記信号品質閾値を超える信号品質ファクタを有して選択される、請求項1に記載の装置。
- 前記再構成手段は、周波数成分の特定の信号品質ファクタによる、すべての、または選択された周波数成分を重み付けするように適合された、請求項1に記載の装置。
- 前記装置は、システム関数測定に点在したバックグラウンド信号測定を実行し、および前記バックグラウンド信号測定から前記信号品質ファクタを導出するように適合された、請求項1に記載の装置。
- 前記装置は、システム関数測定よりも長い時間間隔の間、バックグラウンド測定を実行するように適合された、請求項4に記載の装置。
- 前記再構成手段は、前記バックグラウンド信号測定から得られた周波数固有のバックグラウンド信号を判別することによって、さらに前記システム関数測定の対応する周波数成分からの、周波数固有のバックグラウンド信号を取り去ることによって、システム関数測定から、ゆっくりと変化するバックグラウンド信号を除去するように適合された、請求項4または5に記載の装置。
- 前記再構成手段は、前記バックグラウンド信号測定を補完し、前記補完されたバックグラウンド信号の測定結果を使用して前記周波数固有のバックグラウンド信号を判別するように適合された、請求項6に記載の装置。
- 前記装置が、システム関数測定に点在した前記バックグラウンド信号測定動作を繰り返し、前記取得されたバックグラウンド信号の測定値を平均するように適合され、前記再構成手段は、前記平均されたバックグラウンド信号の測定値から得られた前記周波数固有のバックグラウンド信号を判別するように適合された、請求項6に記載の装置。
- 前記装置は、異なる時間スケールで、前記バックグラウンド信号の測定動作を繰り返すように適合された、請求項4に記載の装置。
- 前記装置は、前記視野域の画像を再構成するための検出信号を受信する前に、および/または前記検出信号を受信した後に、前記バックグラウンド信号の測定動作を実行するように適合された、請求項4に記載の装置。
- 前記装置は、較正測定を実施するように適合され、第1の較正測定は、磁気サンプルが前記視野域を通って移動する間に実行され、第2の較正測定は、前記視野域内に何らの磁気材料無しに実行される、請求項1に記載の装置。
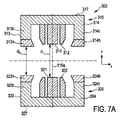
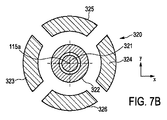
- 前記第1のサブゾーンと、前記第2のサブゾーンとが前記視野域内に形成されるように、磁場強度の空間内における分布パターンを有する磁気選択−収束場を生成し、検査領域内の前記視野域の空間内における前記位置を変化させるための前記選択手段を備える選択−収束手段であって、前記選択−収束手段は、少なくとも1組の選択−収束場コイル、および前記磁気選択−収束場の前記生成を制御するための前記少なくとも1つの組の選択−収束場コイルに与えられる選択−収束場電流を生成するための収束場生成器ユニットを備える選択−収束手段を備え、
前記少なくとも1組の選択−収束場コイルは、
内側コイル軸の周りの閉ループとして形成される、少なくとも1つの内側選択−収束場コイルと、第1の内側選択−収束場コイルと、少なくとも2つの外側選択−収束場コイルのグループとを備え、
前記少なくとも2つの外側選択−収束場コイルは、前記少なくとも1つの内側選択−収束場コイルよりも前記内側コイル軸から大きな距離で、異なる角度位置で配置され、それぞれが関連する外側コイル軸の周りに閉ループを形成する、請求項1に記載の装置。 - 視野域内の磁気粒子を検出するための、選択手段と、駆動手段と、受信手段と、再構成手段と、制御手段とを有する装置の作動方法であって、前記作動方法は、前記制御手段が、
前記選択手段に、前記磁気粒子の磁化が飽和状態に達しない低い磁場強度を有する第1のサブゾーンおよび前記磁気粒子の前記磁化が飽和状態に達する強度であるより高い磁場強度を有する第2のサブゾーンが前記視野域内に形成されるよう磁場強度の空間内における分布パターンを有する選択磁場を生成させるステップと、
前記駆動手段に、磁気材料の前記磁化が局所的に変化するよう、駆動磁場によって前記視野域内の前記2つのサブゾーンの空間内における位置を変化させるステップと、
前記受信手段に、検出信号を取得させるステップであって、検出信号は前記視野域内の前記磁化の状態に左右され、前記磁化の状態は、前記第1のサブゾーンおよび前記第2のサブゾーンの空間内における前記位置の前記変化によって影響される、ステップと、
前記再構成手段に、検出信号からの前記視野域の画像を再構成させるステップであって、前記検出信号のスペクトルが複数の周波数成分を含み、前記周波数成分の1つまたは複数が、バックグラウンド信号測定から取得された周波数成分の特定の信号品質ファクタを使用することで選択されおよび/または重み付けされ、前記選択されおよび/または重み付けされた周波数成分のみが、前記画像の再構成に使用される、ステップと
を備える、作動方法。 - コンピュータに、請求項13に記載の方法の各ステップを、前記制御手段として実行させるコンピュータプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161570854P | 2011-12-15 | 2011-12-15 | |
| US61/570,854 | 2011-12-15 | ||
| PCT/IB2012/057350 WO2013088413A1 (en) | 2011-12-15 | 2012-12-14 | Removal of background in mpi |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015504705A JP2015504705A (ja) | 2015-02-16 |
| JP2015504705A5 JP2015504705A5 (ja) | 2016-01-21 |
| JP6185929B2 true JP6185929B2 (ja) | 2017-08-23 |
Family
ID=48611942
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014546723A Expired - Fee Related JP6185929B2 (ja) | 2011-12-15 | 2012-12-14 | Mpiにおけるバックグラウンド信号の除去 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9903837B2 (ja) |
| EP (1) | EP2790574B1 (ja) |
| JP (1) | JP6185929B2 (ja) |
| CN (1) | CN103997958B (ja) |
| BR (1) | BR112014014284A2 (ja) |
| RU (1) | RU2622481C2 (ja) |
| WO (1) | WO2013088413A1 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5837268B2 (ja) * | 2012-10-12 | 2015-12-24 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | Mpiにおける動的バックグラウンド補正 |
| EP3038525B1 (en) * | 2013-08-30 | 2017-05-10 | Koninklijke Philips N.V. | Coil arrangement of a mpi system or apparatus |
| EP2957220B1 (de) * | 2014-06-16 | 2019-04-24 | Universität zu Lübeck | Computertomographie mit simultanem Magnetic Particle Imaging |
| CN105158712B (zh) * | 2015-10-23 | 2017-11-03 | 河海大学 | 一种精确定位mri系统中梯度场中心的方法 |
| JP7097879B2 (ja) | 2016-07-12 | 2022-07-08 | マグネティック・インサイト・インコーポレイテッド | 磁気粒子イメージング |
| US10478087B2 (en) | 2017-02-16 | 2019-11-19 | Aselsan Elektronik Sanayi Ve Ticaret A.S. | Open bore field free line magnetic particle imaging system |
| DE102018203786B4 (de) | 2018-03-13 | 2024-02-22 | Bruker Biospin Mri Gmbh | Verfahren zur Ermittlung und/oder Reduktion von Artefakten, Verfahren zur Ermittlung einer örtlichen Konzentrationsverteilung, System zur visuellen Darstellung eines korrigierten Gesamtbilddatensatzes |
| DE102018203783B3 (de) | 2018-03-13 | 2019-02-21 | Bruker Biospin Mri Gmbh | MPI-Verfahren und System zur visuellen Darstellung von MPI-Bilddaten |
| US11585882B2 (en) * | 2018-04-11 | 2023-02-21 | Mars Sciences Limited | Superparamagnetic particle imaging and its applications in quantitative multiplex stationary phase diagnostic assays |
| US20210244309A1 (en) * | 2018-05-11 | 2021-08-12 | Aselsan Elektronik Sanayi Ve Ticaret Anonim Sirketi | Method of calibrating magnetic particle imaging system |
| EP3702796A1 (en) * | 2019-02-28 | 2020-09-02 | Julius-Maximilians-Universität Würzburg | System for the one-sided generation of magnetic fields for the multidimensional encoding of magnetic particles and method of operation thereof |
| CN113747938A (zh) | 2019-03-13 | 2021-12-03 | 马格内蒂克因赛特公司 | 磁性粒子致动器 |
| DE102019106665A1 (de) * | 2019-03-15 | 2020-09-17 | Rheinisch-Westfälische Technische Hochschule (Rwth) Aachen | Verfahren und Signalübertragungsanordnung zur Durchführung einer Magnetic-Particle-Imaging-Signalerfassung |
| CN110420026B (zh) * | 2019-07-15 | 2020-05-19 | 中国科学院自动化研究所 | 基于ffl的磁粒子成像三维立体重建方法、系统、装置 |
| CN110940945B (zh) * | 2019-12-02 | 2020-11-03 | 浙江大学 | 具有高时域信号稳定性的磁共振成像射频线圈组件 |
| CN116019436B (zh) * | 2023-03-29 | 2023-06-09 | 中国科学院自动化研究所 | 基于多频驱动的磁粒子三维成像系统及方法 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB8929300D0 (en) * | 1989-12-29 | 1990-02-28 | Instrumentarium Corp | Apparatus |
| JPH0898823A (ja) | 1994-09-09 | 1996-04-16 | Ctf Syst Inc | 微弱磁界測定装置および方法 |
| DE10151778A1 (de) | 2001-10-19 | 2003-05-08 | Philips Corp Intellectual Pty | Verfahren zur Ermittlung der räumlichen Verteilung magnetischer Partikel |
| WO2004091390A2 (en) | 2003-04-15 | 2004-10-28 | Philips Intellectual Property & Standards Gmbh | Device and method for examination and use of an electrical field in an object under examination containing magnetic particles |
| US9107581B2 (en) | 2003-04-15 | 2015-08-18 | Koninklijke Philips N.V. | Elastography device and method for determining and imaging of mechanical and elastic parameters of an examination object |
| WO2004091395A2 (en) | 2003-04-15 | 2004-10-28 | Philips Intellectual Property & Standards Gmbh | Method for spatially resolved determination of magnetic particle distribution in an area of examination |
| US20060248945A1 (en) | 2003-04-15 | 2006-11-09 | Koninklijke Philips Electronics N.V. | Method and apparatus for improved determination of spatial non-agglomerated magnetic particle distribution in an area of examination |
| ATE543428T1 (de) | 2003-04-15 | 2012-02-15 | Koninkl Philips Electronics Nv | Anordnung sowie verfahren zur räumlich aufgelösten bestimmung von zustandsgrössen in einem untersuchungsbereich |
| US20060210986A1 (en) | 2003-04-15 | 2006-09-21 | Koninklijke Philips Electronics N.V. | Method of determining state variables and changes in state variables |
| WO2004091394A2 (en) | 2003-04-15 | 2004-10-28 | Philips Intellectual Property & Standards Gmbh | Method to determine the spatial distribution of magnetic particles and magnetic particle administering compositions |
| ATE546091T1 (de) | 2003-04-15 | 2012-03-15 | Koninkl Philips Electronics Nv | Verfahren zur räumlich aufgelösten bestimmung physikalischer, chemischer und biologischer eigenschaften oder zustandsgrössen |
| US20040249257A1 (en) * | 2003-06-04 | 2004-12-09 | Tupin Joe Paul | Article of manufacture for extracting physiological data using ultra-wideband radar and improved signal processing techniques |
| US7482807B2 (en) * | 2004-09-28 | 2009-01-27 | Koninklijke Philips Electronics N.V. | Method of determining a spatial distribution of magnetic particles |
| CN101479590A (zh) | 2006-06-28 | 2009-07-08 | 皇家飞利浦电子股份有限公司 | 感测磁性颗粒的磁传感器装置和方法 |
| CN101563031A (zh) * | 2006-12-20 | 2009-10-21 | 皇家飞利浦电子股份有限公司 | 用于影响和/或检测作用区域中的磁性粒子的布置和产生盘状线圈的方法 |
| JP5100212B2 (ja) * | 2007-06-15 | 2012-12-19 | 株式会社東芝 | 磁性微粒子イメージング装置、検出コイル配設方法および磁束検出装置 |
| WO2010008478A2 (en) * | 2008-06-23 | 2010-01-21 | The Regents Of The University Of California, Berkeley | Improved techniques for magnetic particle imaging |
| JP5262371B2 (ja) | 2008-07-11 | 2013-08-14 | 日本電気株式会社 | 通報装置、通報システム、通報装置のデータ処理方法、およびそのプログラム |
| DE102008049709B4 (de) | 2008-09-30 | 2019-12-12 | Siemens Healthcare Gmbh | Verfahren zur selektiven Darstellung einer Bewegung der Lunge, Computerprogramm, Bildverarbeitungseinheit und Magnetresonanzgerät |
| BRPI0917033A2 (pt) | 2008-12-08 | 2019-09-03 | Koninl Philips Electronics Nv | configuração para detectar e/ou localizar um material magnético em uma região de ação, processador, método para detectar e/ou localizar um material magnético em uma região de ação, método de processamento e programa de computador |
| JP5234787B2 (ja) | 2009-01-28 | 2013-07-10 | 学校法人明治大学 | 磁性ナノ粒子の磁化応答信号を利用した画像再構成装置及び画像再構成方法 |
| RU2550660C2 (ru) * | 2009-09-14 | 2015-05-10 | Конинклейке Филипс Электроникс Н.В. | Устройство и способ неинвазивной интракардиальной электрокардиографии с формированием изображения с использованием магнитных частиц |
| DE102009053293B4 (de) | 2009-11-13 | 2012-08-02 | Siemens Aktiengesellschaft | Abbildung eines Teilchens, in das magnetisch aktive Stoffe integriert sind, mit einer bildgebenden Magnetresonanzmessung |
| WO2011121487A1 (en) | 2010-04-01 | 2011-10-06 | Koninklijke Philips Electronics N.V. | Apparatus and method for forming a concentration image of the concentration of magnetic particles arranged in a field of view |
| JP5837268B2 (ja) * | 2012-10-12 | 2015-12-24 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | Mpiにおける動的バックグラウンド補正 |
| US10168408B2 (en) * | 2013-09-11 | 2019-01-01 | Koninklijke Philips N.V. | MPI apparatus with fast field of view motion |
| EP3240476B1 (en) * | 2014-12-29 | 2018-08-22 | Koninklijke Philips N.V. | Cabling arrangement, coil apparatus and apparatus for influencing and/or detecting magnetic particles |
-
2012
- 2012-12-14 US US14/364,954 patent/US9903837B2/en active Active
- 2012-12-14 CN CN201280061250.5A patent/CN103997958B/zh not_active Expired - Fee Related
- 2012-12-14 RU RU2014128811A patent/RU2622481C2/ru not_active IP Right Cessation
- 2012-12-14 JP JP2014546723A patent/JP6185929B2/ja not_active Expired - Fee Related
- 2012-12-14 WO PCT/IB2012/057350 patent/WO2013088413A1/en active Application Filing
- 2012-12-14 EP EP12823097.6A patent/EP2790574B1/en not_active Not-in-force
- 2012-12-14 BR BR112014014284A patent/BR112014014284A2/pt not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| EP2790574A1 (en) | 2014-10-22 |
| CN103997958A (zh) | 2014-08-20 |
| CN103997958B (zh) | 2017-03-29 |
| RU2622481C2 (ru) | 2017-06-15 |
| WO2013088413A1 (en) | 2013-06-20 |
| RU2014128811A (ru) | 2016-02-10 |
| EP2790574B1 (en) | 2018-03-21 |
| BR112014014284A2 (pt) | 2017-06-13 |
| JP2015504705A (ja) | 2015-02-16 |
| US9903837B2 (en) | 2018-02-27 |
| US20150300987A1 (en) | 2015-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6185929B2 (ja) | Mpiにおけるバックグラウンド信号の除去 | |
| JP6106184B2 (ja) | Mpiのためのコイル配置 | |
| JP6246129B2 (ja) | 広視野を有する、磁性粒子に影響を及ぼし、且つ/又は磁性粒子を検出する装置及び方法 | |
| JP5993866B2 (ja) | 磁性粒子に影響を及ぼす及び/又は磁性粒子を検出するための装置及び方法 | |
| RU2556967C2 (ru) | Устройство и способ воздействия на магнитные частицы и/или их обнаружения в поле зрения с использованием матрицы наборов односторонних передающихся катушек | |
| JP5608236B2 (ja) | 撮像領域内の磁性粒子に影響及び/又は磁性粒子を検出する装置及び方法 | |
| JP6318306B2 (ja) | 磁性粒子に作用し及び/又は該磁性粒子を検出するケーブル布線構造、コイル装置、及び装置 | |
| JP5837268B2 (ja) | Mpiにおける動的バックグラウンド補正 | |
| JP6232140B2 (ja) | 高速な視野動作を備えたmpi装置 | |
| WO2016023743A2 (en) | Apparatus and method for targeted drug delivery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151127 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151211 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160921 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161101 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170728 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6185929 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |