JP6167111B2 - 電気外科器具とそのジョー部 - Google Patents
電気外科器具とそのジョー部 Download PDFInfo
- Publication number
- JP6167111B2 JP6167111B2 JP2014550685A JP2014550685A JP6167111B2 JP 6167111 B2 JP6167111 B2 JP 6167111B2 JP 2014550685 A JP2014550685 A JP 2014550685A JP 2014550685 A JP2014550685 A JP 2014550685A JP 6167111 B2 JP6167111 B2 JP 6167111B2
- Authority
- JP
- Japan
- Prior art keywords
- instrument
- spacer
- leg
- electrode
- legs
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00059—Material properties
- A61B2018/00071—Electrical conductivity
- A61B2018/00083—Electrical conductivity low, i.e. electrically insulating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/0016—Energy applicators arranged in a two- or three dimensional array
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00482—Digestive system
- A61B2018/00494—Stomach, intestines or bowel
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/033—Abutting means, stops, e.g. abutting on tissue or skin
Description
以下の項目は、国際出願時の特許請求の範囲に記載の要素である。
(項目1)
相互に動作可能な器具レッグ(4,6)から成るジョー部を含み、
前記器具レッグ(4,6)は、一つまたは複数の電極域(20)が配置/形成されている対向面をそれぞれ有し、
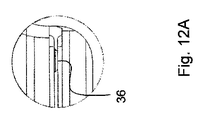
前記器具レッグ(4,6)の相対的動作は前記器具レッグ(4,6)の近位端部で作用する少なくとも一つの第1スペーサ(24;36;48,50,52,54)と、器具レッグ(4,6)の遠位端部で作用する少なくとも一つの第2スペーサ(22;32,34;32)によって制限され、
少なくとも1つの電極(360)上にあるスペーサ(300)のうちの少なくとも1つは導電性物質で形成されており、通電可能に電極(300)に接続されており、非導電性物質で形成されるとともに少なくとも1つの対向する電極(370)に電気的に絶縁されて配置されているスペーサ当接面(350)と協働することを特徴とする、電気外科器具(2)。
(項目2)
前記スペーサ当接面(350)は、全方位において電極面における面積が前記スペーサ(300)を超えて突出するパッド形状もしくはピン形状の構成物からなり、
前記スペーサ(300)が前記スペーサ当接面(250)を含む電極(370)と電気的接触しないように構成されていることを特徴とする、項目1に記載の電気外科器具(2)。
(項目3)
前記スペーサ当接面(350)を含む前記電極(370)は、その表面に少なくとも1つのくぼみ(372)を有するように形成されており、
前記くぼみ(372)にはパッドもしくはピン形状の前記スペーサ当接面(350)が挿入され、もしくは固化後に前記スペーサ当接面(350)を形成する電気絶縁材料で鋳造されることを特徴とする、項目1または2に記載の電気外科器具(2)。
(項目4)
前記スペーサ当接面(350)が、電極域に対して水平である、もしくは前記電極域に対して凹面を有するか、もしくはへこんでいることを特徴とする、項目3に記載の電気外科器具(2)。
(項目5)
前記くぼみ(372,374)は、長手方向断面においてきのこ形状もしくはT字形状であることを特徴とする、項目3または4に記載の電気外科器具(2)。
(項目6)
導電性スペーサとして作用する多くても1つの突出物(32,34;32,36;32,46)が、それぞれの電極域(20)に配置/固定されていることを特徴とする、項目1から5のいずれか一項に記載の電気外科器具(2)。
(項目7)
前記スペーサ(22,24,32,34,48,50,52,54)は、組織処置のための領域の外側にのみ配置されることを特徴とする、項目1から6のいずれかの項目に記載の電気外科器具(2)。
(項目8)
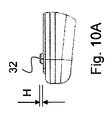
少なくとも一つのスペーサ、特に第1のスペーサがスペーサモジュール(24)で形成されており、
前記スペーサモジュール(24)は、前記器具レッグ(4,6)から分離可能に形成されており、閉止位置において前記器具レッグ(4、6)の間に保持される少なくとも一つの非導電性の舌部(28)を含んでおり、
前記舌部(28)の高さ(H)が前記閉止位置における前記器具レッグ(4、6)間の所定の最小距離(S)と一致することを特徴とする、項目1から7のいずれかの項目に記載の電気外科器具(2)。
(項目9)
前記スペーサモジュール(24)が、回動可能な器具レッグ(4)のスイベルジョイント(16)に回転可能に支持されており、
前記スペーサモジュール(24)のための収容キャビティを画定する、回動可能な前記器具レッグ(4)のフランジ形のジョイント部に特に囲まれていることを特徴とする、項目8に記載の電気外科器具(2)。
(項目10)
少なくとも一つの前記器具レッグ(4,6)は、好ましくはその他方の器具レッグ(6,4)の側面にあるスロット型のガイド(52,54)によって案内される回転制限ピン(48,50)を含んでおり、
前記回転制限ピン(48,50)と前記スロット型のガイド(52,54)との協働がスペーサ、特に第1のスペーサを構成もしくは模擬しており、
前記回転制限ピン(48,50)が前記スロット型のガイド(52,54)の端部に到達するときに、前記器具レッグ(4,6)が互いに対しての所定の最小限の距離(S)を有することを特徴とする、項目1から8のいずれかの項目に記載の電気外科器具(2)。
(項目11)
少なくとも一つの前記器具レッグ(4,6)の近位端と遠位端の間に、その他方の器具レッグ(6,4)に指向する一つ以上のリッジ(38,40,42,44)が好ましくは等間隔に形成されており、
前記リッジ(38,40,42,44)の高さ(h)は、前記スペーサ(24,32,34,36,46;48,50,52,54)の高さ(H)よりも低く、好ましくは前記スペーサ(24,32,34,36,46;48,50,52,54)の高さ(H)の10%から75%であることを特徴とする、項目1から10のいずれかの項目に記載の電気外科器具(2)。
Claims (13)
- 相互に動作可能な器具レッグ(4,6)から成るジョー部を含み、
前記器具レッグ(4,6)は、一つまたは複数の電極域(20)が配置/形成されている対向面をそれぞれ有し、
前記器具レッグ(4,6)の相対的動作は前記器具レッグ(4,6)の近位端部で作用する少なくとも一つの第1スペーサ(24;36;48,50,52,54)と、器具レッグ(4,6)の遠位端部で作用する少なくとも一つの第2スペーサ(22;32,34;32)によって制限されており、
少なくとも1つの電極(360)上にあるスペーサ(300)のうちの少なくとも1つは導電性物質で形成されており、通電可能に電極(360)に接続されており、非導電性物質で形成されるとともに少なくとも1つの対向する電極(370)に電気的に絶縁されて配置されているスペーサ当接面(350)と協働し、
前記スペーサ当接面(350)は、前記スペーサ(300)に向かって指向している凹面を有するか、または前記電極域に対してへこんでおり、
前記スペーサ当接面(350)を含む前記電極(370)は、その表面に少なくとも1つのくぼみ(372,374)を有するように形成されており、
前記くぼみ(372,374)にはパッドもしくはピン形状の前記スペーサ当接面(350)が挿入され、もしくは、固化後に前記スペーサ当接面(350)を形成する電気絶縁材料で鋳造されており、
前記くぼみ(372,374)は、長手方向断面においてきのこ形状もしくはT字形状であることを特徴とする、電気外科器具(2)。 - 前記スペーサ当接面(350)は、全方位において電極面における面積が前記スペーサ(300)を超えて突出するパッド形状もしくはピン形状の構成物からなり、
前記スペーサ(300)が前記スペーサ当接面(350)を含む電極(370)と電気的接触しないように構成されていることを特徴とする、請求項1に記載の電気外科器具(2)。 - 導電性スペーサとして作用する多くても1つの突出物(32,34;32,36;32,46)が、それぞれの電極域(20)に配置/固定されていることを特徴とする、請求項1又は2のいずれか一項に記載の電気外科器具(2)。
- 少なくとも一つのスペーサがスペーサモジュール(24)で形成されており、
前記スペーサモジュール(24)は、前記器具レッグ(4,6)から分離可能に形成されており、閉止位置において前記器具レッグ(4、6)の間に保持される少なくとも一つの非導電性の舌部(28)を含んでおり、
前記舌部(28)の高さ(H)が前記閉止位置における前記器具レッグ(4、6)間の所定の最小距離(S)と一致することを特徴とする、請求項1から3のいずれか一項に記載の電気外科器具(2)。 - 前記スペーサモジュール(24)が、回動可能な器具レッグ(4)のスイベルジョイント(16)に回転可能に支持されており、
前記スペーサモジュール(24)のための収容キャビティを画定する、回動可能な前記器具レッグ(4)のフランジ形のジョイント部に囲まれていることを特徴とする、請求項4に記載の電気外科器具(2)。 - 相互に動作可能な器具レッグ(4,6)から成るジョー部を含み、
前記器具レッグ(4,6)は、一つまたは複数の電極域(20)が配置/形成されている対向面をそれぞれ有し、
前記器具レッグ(4,6)の相対的動作は前記器具レッグ(4,6)の近位端部で作用する少なくとも一つの第1スペーサ(24;36;48,50,52,54)と、器具レッグ(4,6)の遠位端部で作用する少なくとも一つの第2スペーサ(22;32,34;32)によって制限されており、
スペーサとして作用する多くても1つの突出物(32,34;32,36;32,46)が、それぞれの電極域(20)に配置/固定されており、
少なくとも一つのスペーサがスペーサモジュール(24)で形成されており、
前記スペーサモジュール(24)は、前記器具レッグ(4,6)から分離可能に形成されており、閉止位置において前記器具レッグ(4,6)の間に保持される少なくとも一つの非導電性の舌部(28)を含んでおり、
前記舌部(28)の高さ(H)が前記閉止位置における前記器具レッグ(4,6)間の所定の最小距離(S)と一致し、
前記スペーサモジュール(24)が、
回動可能な器具レッグ(4)のスイベルジョイント(16)に回転可能に支持されており、
前記スペーサモジュール(24)のための収容キャビティを画定する、回動可能な前記器具レッグ(4)のフランジ形のジョイント部に囲まれていることを特徴とする、電気外科器具(2)。 - 前記1つの器具レッグ(4)の近位端部が、径方向側において、前記他の器具レッグ(6)または前記他の器具レッグ(6)のキャリア部(18)に囲まれることで、前記1つの器具レッグ(4)は、前記1つの器具レッグ(4)の近位端部において、前記他の器具レッグ(6)の取付開口、または前記他の器具レッグ(6)のキャリア部(18)の取付開口に回動可能に案内され、
前記回動可能に案内されている器具レッグ(4)のフランジ形のジョイント部が、スペーサモジュール(24)と他の器具レッグ(6)の間に配置されるように、前記スペーサモジュール(24)の収容キャビティは、回動可能に案内されている前記1つの器具レッグ(4)に形成されている、請求項6に記載の電気外科器具(2)。 - 前記スペーサ(22,24,32,34,48,50,52,54)は、組織処置のための領域の外側にのみ配置されることを特徴とする、請求項1から7のいずれか一項に記載の電気外科器具(2)。
- 少なくとも一つの前記器具レッグ(4,6)は、その他方の器具レッグ(6,4)の側面にあるスロット型のガイド(52,54)によって案内される回転制限ピン(48,50)を含んでおり、
前記回転制限ピン(48,50)と前記スロット型のガイド(52,54)との協働がスペーサを構成しており、
前記回転制限ピン(48,50)が前記スロット型のガイド(52,54)の端部に到達するときに、前記器具レッグ(4,6)が互いに対しての所定の最小限の距離(S)を有することを特徴とする、請求項1から3のいずれか一項に記載の電気外科器具(2)。 - 少なくとも一つの前記器具レッグ(4,6)の近位端と遠位端の間に、その他方の器具レッグ(6,4)に指向する一つ以上のリッジ(38,40,42,44)が等間隔に形成されており、
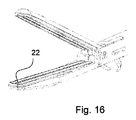
前記リッジ(38,40,42,44)の高さ(h)は、前記スペーサ(24,32,34,36,46;48,50,52,54)の高さ(H)よりも低く、前記スペーサ(24,32,34,36,46;48,50,52,54)の高さ(H)の10%から75%であることを特徴とする、請求項1から9のいずれか一項に記載の電気外科器具(2)。 - スペーサは、前記器具レッグ(6)の2つの電極域(20−3,20−4)の間の前記器具レッグ(6)の遠位端部に配置されている突起物(22)によって形成されており、他の器具レッグ(4)に向かって指向している、
または、
スペーサは、電極域(20−3)に設けられている突起物、もしくは、それぞれ異なる電極域(20−3,20−4)に設けられている複数の突起物(32;32,34)によって形成されている、請求項6に記載の電気外科器具(2)。 - 少なくとも1つの第3のスペーサは、前記器具レッグ(4、6)の中央部分で動作し、
前記第3のスペーサは、突起物として形成されており、1つの電極領域(20−2)に配置/形成されるスペーサの数が1を超えないように配置されている、請求項6に記載の電気外科器具(2)。 - 少なくとも1つの前記器具レッグ(4,6)の近位端と遠位端の間において、他の器具レッグ(6,4)に向かって指向する一つ以上のリッジ(38,40,42,44)が等間隔に形成されており、
前記リッジの高さ(H)は、前記スペーサ(24,32,34,36,46;48,50,52,54)の高さ(H)よりも低く、前記スペーサ(24,32,34,36,46;48,50,52,54)の高さ(H)の10%から75%であり、
別体のスペーサモジュール(24)の舌部(28)は、非導電性材料で形成されている、請求項11または12に記載の電気外科器具(2)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012100040.9 | 2012-01-04 | ||
| DE102012100040A DE102012100040A1 (de) | 2012-01-04 | 2012-01-04 | Elektrochirurgisches Instrument und Maulteil hierfür |
| PCT/EP2012/076945 WO2013102602A2 (de) | 2012-01-04 | 2012-12-27 | Elektrochirurgisches instrument und maulteil hierfür |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015504734A JP2015504734A (ja) | 2015-02-16 |
| JP2015504734A5 JP2015504734A5 (ja) | 2016-02-18 |
| JP6167111B2 true JP6167111B2 (ja) | 2017-07-19 |
Family
ID=47557117
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014550685A Active JP6167111B2 (ja) | 2012-01-04 | 2012-12-27 | 電気外科器具とそのジョー部 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10092350B2 (ja) |
| EP (1) | EP2800533B1 (ja) |
| JP (1) | JP6167111B2 (ja) |
| DE (1) | DE102012100040A1 (ja) |
| ES (1) | ES2729552T3 (ja) |
| WO (1) | WO2013102602A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022115164A1 (de) | 2022-06-16 | 2023-12-21 | Olympus Winter & Ibe Gmbh | Chirurgisches Werkzeug und elektrochirurgisches Handinstrument sowie Verfahren zur Erkennung eines chirurgischen Werkzeugs |
Families Citing this family (152)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10835307B2 (en) | 2001-06-12 | 2020-11-17 | Ethicon Llc | Modular battery powered handheld surgical instrument containing elongated multi-layered shaft |
| US8182501B2 (en) | 2004-02-27 | 2012-05-22 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical shears and method for sealing a blood vessel using same |
| EP1802245B8 (en) | 2004-10-08 | 2016-09-28 | Ethicon Endo-Surgery, LLC | Ultrasonic surgical instrument |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US7621930B2 (en) | 2006-01-20 | 2009-11-24 | Ethicon Endo-Surgery, Inc. | Ultrasound medical instrument having a medical ultrasonic blade |
| US8142461B2 (en) | 2007-03-22 | 2012-03-27 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| US8911460B2 (en) | 2007-03-22 | 2014-12-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8523889B2 (en) | 2007-07-27 | 2013-09-03 | Ethicon Endo-Surgery, Inc. | Ultrasonic end effectors with increased active length |
| US8808319B2 (en) | 2007-07-27 | 2014-08-19 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8430898B2 (en) | 2007-07-31 | 2013-04-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8512365B2 (en) | 2007-07-31 | 2013-08-20 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US9044261B2 (en) | 2007-07-31 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Temperature controlled ultrasonic surgical instruments |
| AU2008308606B2 (en) | 2007-10-05 | 2014-12-18 | Ethicon Endo-Surgery, Inc. | Ergonomic surgical instruments |
| US10010339B2 (en) | 2007-11-30 | 2018-07-03 | Ethicon Llc | Ultrasonic surgical blades |
| US9089360B2 (en) | 2008-08-06 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| US9700339B2 (en) | 2009-05-20 | 2017-07-11 | Ethicon Endo-Surgery, Inc. | Coupling arrangements and methods for attaching tools to ultrasonic surgical instruments |
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US9039695B2 (en) | 2009-10-09 | 2015-05-26 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US10441345B2 (en) | 2009-10-09 | 2019-10-15 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US10172669B2 (en) | 2009-10-09 | 2019-01-08 | Ethicon Llc | Surgical instrument comprising an energy trigger lockout |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US8486096B2 (en) | 2010-02-11 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Dual purpose surgical instrument for cutting and coagulating tissue |
| US8951272B2 (en) | 2010-02-11 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Seal arrangements for ultrasonically powered surgical instruments |
| US8469981B2 (en) | 2010-02-11 | 2013-06-25 | Ethicon Endo-Surgery, Inc. | Rotatable cutting implement arrangements for ultrasonic surgical instruments |
| US8834518B2 (en) | 2010-04-12 | 2014-09-16 | Ethicon Endo-Surgery, Inc. | Electrosurgical cutting and sealing instruments with cam-actuated jaws |
| GB2480498A (en) | 2010-05-21 | 2011-11-23 | Ethicon Endo Surgery Inc | Medical device comprising RF circuitry |
| US8795327B2 (en) | 2010-07-22 | 2014-08-05 | Ethicon Endo-Surgery, Inc. | Electrosurgical instrument with separate closure and cutting members |
| US9192431B2 (en) | 2010-07-23 | 2015-11-24 | Ethicon Endo-Surgery, Inc. | Electrosurgical cutting and sealing instrument |
| US9259265B2 (en) | 2011-07-22 | 2016-02-16 | Ethicon Endo-Surgery, Llc | Surgical instruments for tensioning tissue |
| US9044243B2 (en) | 2011-08-30 | 2015-06-02 | Ethcon Endo-Surgery, Inc. | Surgical cutting and fastening device with descendible second trigger arrangement |
| JP6234932B2 (ja) | 2011-10-24 | 2017-11-22 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 医療用器具 |
| DE102012100040A1 (de) | 2012-01-04 | 2013-07-04 | Aesculap Ag | Elektrochirurgisches Instrument und Maulteil hierfür |
| WO2013119545A1 (en) | 2012-02-10 | 2013-08-15 | Ethicon-Endo Surgery, Inc. | Robotically controlled surgical instrument |
| DE102012101257A1 (de) | 2012-02-16 | 2013-08-22 | Aesculap Ag | Elektrochirurgisches Instrument |
| US9439668B2 (en) | 2012-04-09 | 2016-09-13 | Ethicon Endo-Surgery, Llc | Switch arrangements for ultrasonic surgical instruments |
| US9265514B2 (en) | 2012-04-17 | 2016-02-23 | Miteas Ltd. | Manipulator for grasping tissue |
| US20140005705A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulating shafts |
| US9351754B2 (en) | 2012-06-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US9226767B2 (en) | 2012-06-29 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Closed feedback control for electrosurgical device |
| US9326788B2 (en) | 2012-06-29 | 2016-05-03 | Ethicon Endo-Surgery, Llc | Lockout mechanism for use with robotic electrosurgical device |
| US20140005702A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with distally positioned transducers |
| US9198714B2 (en) | 2012-06-29 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Haptic feedback devices for surgical robot |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9820768B2 (en) | 2012-06-29 | 2017-11-21 | Ethicon Llc | Ultrasonic surgical instruments with control mechanisms |
| WO2014052181A1 (en) | 2012-09-28 | 2014-04-03 | Ethicon Endo-Surgery, Inc. | Multi-function bi-polar forceps |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| US20140135804A1 (en) | 2012-11-15 | 2014-05-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic and electrosurgical devices |
| US10226273B2 (en) | 2013-03-14 | 2019-03-12 | Ethicon Llc | Mechanical fasteners for use with surgical energy devices |
| US9814514B2 (en) | 2013-09-13 | 2017-11-14 | Ethicon Llc | Electrosurgical (RF) medical instruments for cutting and coagulating tissue |
| US9265926B2 (en) | 2013-11-08 | 2016-02-23 | Ethicon Endo-Surgery, Llc | Electrosurgical devices |
| GB2521228A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| GB2521229A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| US9795436B2 (en) | 2014-01-07 | 2017-10-24 | Ethicon Llc | Harvesting energy from a surgical generator |
| US9554854B2 (en) | 2014-03-18 | 2017-01-31 | Ethicon Endo-Surgery, Llc | Detecting short circuits in electrosurgical medical devices |
| US10463421B2 (en) | 2014-03-27 | 2019-11-05 | Ethicon Llc | Two stage trigger, clamp and cut bipolar vessel sealer |
| US10092310B2 (en) | 2014-03-27 | 2018-10-09 | Ethicon Llc | Electrosurgical devices |
| US10524852B1 (en) | 2014-03-28 | 2020-01-07 | Ethicon Llc | Distal sealing end effector with spacers |
| US9737355B2 (en) | 2014-03-31 | 2017-08-22 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| US9980769B2 (en) | 2014-04-08 | 2018-05-29 | Ethicon Llc | Methods and devices for controlling motorized surgical devices |
| US9913680B2 (en) | 2014-04-15 | 2018-03-13 | Ethicon Llc | Software algorithms for electrosurgical instruments |
| US9757186B2 (en) | 2014-04-17 | 2017-09-12 | Ethicon Llc | Device status feedback for bipolar tissue spacer |
| DE102014108914A1 (de) * | 2014-06-25 | 2015-12-31 | Aesculap Ag | Elektrochirurgisches Instrument und Maulteil hierfür |
| US10285724B2 (en) | 2014-07-31 | 2019-05-14 | Ethicon Llc | Actuation mechanisms and load adjustment assemblies for surgical instruments |
| US10194976B2 (en) | 2014-08-25 | 2019-02-05 | Ethicon Llc | Lockout disabling mechanism |
| US9877776B2 (en) | 2014-08-25 | 2018-01-30 | Ethicon Llc | Simultaneous I-beam and spring driven cam jaw closure mechanism |
| US10194972B2 (en) | 2014-08-26 | 2019-02-05 | Ethicon Llc | Managing tissue treatment |
| US10639092B2 (en) | 2014-12-08 | 2020-05-05 | Ethicon Llc | Electrode configurations for surgical instruments |
| US9848937B2 (en) | 2014-12-22 | 2017-12-26 | Ethicon Llc | End effector with detectable configurations |
| US10159524B2 (en) | 2014-12-22 | 2018-12-25 | Ethicon Llc | High power battery powered RF amplifier topology |
| US10111699B2 (en) | 2014-12-22 | 2018-10-30 | Ethicon Llc | RF tissue sealer, shear grip, trigger lock mechanism and energy activation |
| US10092348B2 (en) | 2014-12-22 | 2018-10-09 | Ethicon Llc | RF tissue sealer, shear grip, trigger lock mechanism and energy activation |
| GB2535003B (en) * | 2015-01-14 | 2018-12-12 | Gyrus Medical Ltd | Electrosurgical instrument |
| GB2535627B (en) * | 2015-01-14 | 2017-06-28 | Gyrus Medical Ltd | Electrosurgical system |
| US10245095B2 (en) | 2015-02-06 | 2019-04-02 | Ethicon Llc | Electrosurgical instrument with rotation and articulation mechanisms |
| US10342602B2 (en) | 2015-03-17 | 2019-07-09 | Ethicon Llc | Managing tissue treatment |
| US10321950B2 (en) | 2015-03-17 | 2019-06-18 | Ethicon Llc | Managing tissue treatment |
| US10595929B2 (en) | 2015-03-24 | 2020-03-24 | Ethicon Llc | Surgical instruments with firing system overload protection mechanisms |
| US10314638B2 (en) | 2015-04-07 | 2019-06-11 | Ethicon Llc | Articulating radio frequency (RF) tissue seal with articulating state sensing |
| US10117702B2 (en) | 2015-04-10 | 2018-11-06 | Ethicon Llc | Surgical generator systems and related methods |
| US10130410B2 (en) | 2015-04-17 | 2018-11-20 | Ethicon Llc | Electrosurgical instrument including a cutting member decouplable from a cutting member trigger |
| US9872725B2 (en) | 2015-04-29 | 2018-01-23 | Ethicon Llc | RF tissue sealer with mode selection |
| DE102015108078A1 (de) * | 2015-05-21 | 2016-11-24 | Aesculap Ag | Elektrochirurgisches Koagulationsinstrument |
| US11020140B2 (en) | 2015-06-17 | 2021-06-01 | Cilag Gmbh International | Ultrasonic surgical blade for use with ultrasonic surgical instruments |
| US11141213B2 (en) | 2015-06-30 | 2021-10-12 | Cilag Gmbh International | Surgical instrument with user adaptable techniques |
| US11129669B2 (en) | 2015-06-30 | 2021-09-28 | Cilag Gmbh International | Surgical system with user adaptable techniques based on tissue type |
| US10357303B2 (en) | 2015-06-30 | 2019-07-23 | Ethicon Llc | Translatable outer tube for sealing using shielded lap chole dissector |
| US10034704B2 (en) | 2015-06-30 | 2018-07-31 | Ethicon Llc | Surgical instrument with user adaptable algorithms |
| US10898256B2 (en) | 2015-06-30 | 2021-01-26 | Ethicon Llc | Surgical system with user adaptable techniques based on tissue impedance |
| US11051873B2 (en) | 2015-06-30 | 2021-07-06 | Cilag Gmbh International | Surgical system with user adaptable techniques employing multiple energy modalities based on tissue parameters |
| US10154852B2 (en) | 2015-07-01 | 2018-12-18 | Ethicon Llc | Ultrasonic surgical blade with improved cutting and coagulation features |
| US10194973B2 (en) | 2015-09-30 | 2019-02-05 | Ethicon Llc | Generator for digitally generating electrical signal waveforms for electrosurgical and ultrasonic surgical instruments |
| US10959771B2 (en) | 2015-10-16 | 2021-03-30 | Ethicon Llc | Suction and irrigation sealing grasper |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| US10959806B2 (en) | 2015-12-30 | 2021-03-30 | Ethicon Llc | Energized medical device with reusable handle |
| US10179022B2 (en) | 2015-12-30 | 2019-01-15 | Ethicon Llc | Jaw position impedance limiter for electrosurgical instrument |
| US10575892B2 (en) | 2015-12-31 | 2020-03-03 | Ethicon Llc | Adapter for electrical surgical instruments |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US11129670B2 (en) | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US11051840B2 (en) | 2016-01-15 | 2021-07-06 | Ethicon Llc | Modular battery powered handheld surgical instrument with reusable asymmetric handle housing |
| US10716615B2 (en) | 2016-01-15 | 2020-07-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with curved end effectors having asymmetric engagement between jaw and blade |
| US10555769B2 (en) | 2016-02-22 | 2020-02-11 | Ethicon Llc | Flexible circuits for electrosurgical instrument |
| US10856934B2 (en) | 2016-04-29 | 2020-12-08 | Ethicon Llc | Electrosurgical instrument with electrically conductive gap setting and tissue engaging members |
| US10485607B2 (en) | 2016-04-29 | 2019-11-26 | Ethicon Llc | Jaw structure with distal closure for electrosurgical instruments |
| US10702329B2 (en) * | 2016-04-29 | 2020-07-07 | Ethicon Llc | Jaw structure with distal post for electrosurgical instruments |
| US10646269B2 (en) | 2016-04-29 | 2020-05-12 | Ethicon Llc | Non-linear jaw gap for electrosurgical instruments |
| US10987156B2 (en) | 2016-04-29 | 2021-04-27 | Ethicon Llc | Electrosurgical instrument with electrically conductive gap setting member and electrically insulative tissue engaging members |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| US10245064B2 (en) | 2016-07-12 | 2019-04-02 | Ethicon Llc | Ultrasonic surgical instrument with piezoelectric central lumen transducer |
| US10893883B2 (en) | 2016-07-13 | 2021-01-19 | Ethicon Llc | Ultrasonic assembly for use with ultrasonic surgical instruments |
| US10842522B2 (en) | 2016-07-15 | 2020-11-24 | Ethicon Llc | Ultrasonic surgical instruments having offset blades |
| US10376305B2 (en) | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US10285723B2 (en) | 2016-08-09 | 2019-05-14 | Ethicon Llc | Ultrasonic surgical blade with improved heel portion |
| USD847990S1 (en) | 2016-08-16 | 2019-05-07 | Ethicon Llc | Surgical instrument |
| US10828056B2 (en) | 2016-08-25 | 2020-11-10 | Ethicon Llc | Ultrasonic transducer to waveguide acoustic coupling, connections, and configurations |
| US10952759B2 (en) | 2016-08-25 | 2021-03-23 | Ethicon Llc | Tissue loading of a surgical instrument |
| US10751117B2 (en) | 2016-09-23 | 2020-08-25 | Ethicon Llc | Electrosurgical instrument with fluid diverter |
| US10603064B2 (en) | 2016-11-28 | 2020-03-31 | Ethicon Llc | Ultrasonic transducer |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| US11033325B2 (en) | 2017-02-16 | 2021-06-15 | Cilag Gmbh International | Electrosurgical instrument with telescoping suction port and debris cleaner |
| US10799284B2 (en) | 2017-03-15 | 2020-10-13 | Ethicon Llc | Electrosurgical instrument with textured jaws |
| US11497546B2 (en) | 2017-03-31 | 2022-11-15 | Cilag Gmbh International | Area ratios of patterned coatings on RF electrodes to reduce sticking |
| US10603117B2 (en) | 2017-06-28 | 2020-03-31 | Ethicon Llc | Articulation state detection mechanisms |
| US10820920B2 (en) | 2017-07-05 | 2020-11-03 | Ethicon Llc | Reusable ultrasonic medical devices and methods of their use |
| US11490951B2 (en) | 2017-09-29 | 2022-11-08 | Cilag Gmbh International | Saline contact with electrodes |
| US11484358B2 (en) | 2017-09-29 | 2022-11-01 | Cilag Gmbh International | Flexible electrosurgical instrument |
| US11033323B2 (en) | 2017-09-29 | 2021-06-15 | Cilag Gmbh International | Systems and methods for managing fluid and suction in electrosurgical systems |
| GB2567654B (en) * | 2017-10-18 | 2022-10-05 | Gyrus Medical Ltd | Electrosurgical instrument |
| US11813017B2 (en) | 2019-03-11 | 2023-11-14 | Microline Surgical, Inc. | Reusable minimally invasive surgical instrument |
| JP1660090S (ja) * | 2019-10-04 | 2020-05-25 | ||
| JP1660086S (ja) * | 2019-10-04 | 2020-05-25 | ||
| JP1660087S (ja) * | 2019-10-04 | 2020-05-25 | ||
| JP1660089S (ja) * | 2019-10-04 | 2020-05-25 | ||
| US20210196349A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with flexible wiring assemblies |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11786294B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Control program for modular combination energy device |
| US11911063B2 (en) | 2019-12-30 | 2024-02-27 | Cilag Gmbh International | Techniques for detecting ultrasonic blade to electrode contact and reducing power to ultrasonic blade |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11707318B2 (en) | 2019-12-30 | 2023-07-25 | Cilag Gmbh International | Surgical instrument with jaw alignment features |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US20210196362A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical end effectors with thermally insulative and thermally conductive portions |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| JP1702878S (ja) * | 2021-04-09 | 2021-12-20 | ||
| US11957342B2 (en) | 2021-11-01 | 2024-04-16 | Cilag Gmbh International | Devices, systems, and methods for detecting tissue and foreign objects during a surgical operation |
Family Cites Families (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2324658B2 (de) | 1973-05-16 | 1977-06-30 | Richard Wolf Gmbh, 7134 Knittlingen | Sonde zum koagulieren von koerpergewebe |
| FR2505170B1 (fr) | 1981-05-06 | 1985-08-02 | Metallisations Traitements Opt | Pince a biopsie |
| US5222973A (en) | 1992-03-09 | 1993-06-29 | Sharpe Endosurgical Corporation | Endoscopic grasping tool surgical instrument |
| US5258006A (en) | 1992-08-21 | 1993-11-02 | Everest Medical Corporation | Bipolar electrosurgical forceps |
| US5638827A (en) | 1994-02-01 | 1997-06-17 | Symbiosis Corporation | Super-elastic flexible jaws assembly for an endoscopic multiple sample bioptome |
| US5891142A (en) | 1996-12-06 | 1999-04-06 | Eggers & Associates, Inc. | Electrosurgical forceps |
| EP1027000A4 (en) | 1997-10-09 | 2001-09-12 | Camran Nezhat | ORGAN RESECTION METHODS AND SYSTEMS |
| US7582087B2 (en) | 1998-10-23 | 2009-09-01 | Covidien Ag | Vessel sealing instrument |
| US20040249374A1 (en) | 1998-10-23 | 2004-12-09 | Tetzlaff Philip M. | Vessel sealing instrument |
| WO2000024330A1 (en) | 1998-10-23 | 2000-05-04 | Sherwood Services Ag | Open vessel sealing forceps with disposable electrodes |
| EP2072017B1 (en) | 1998-10-23 | 2018-04-18 | Covidien AG | Endoscopic bipolar electrosurgical forceps |
| DE60109328T2 (de) | 2001-04-06 | 2006-04-06 | Sherwood Services Ag | Gefässdichtungsgerät und gefässtrennungsgerät |
| JP4699679B2 (ja) | 2001-04-06 | 2011-06-15 | コヴィディエン・アクチェンゲゼルシャフト | 血管の封止装置 |
| ES2364666T3 (es) * | 2001-04-06 | 2011-09-12 | Covidien Ag | Obturador y divisor de vasos con miembros de tope no conductivos. |
| US6802843B2 (en) | 2001-09-13 | 2004-10-12 | Csaba Truckai | Electrosurgical working end with resistive gradient electrodes |
| US6770072B1 (en) | 2001-10-22 | 2004-08-03 | Surgrx, Inc. | Electrosurgical jaw structure for controlled energy delivery |
| JP4420593B2 (ja) | 2002-07-29 | 2010-02-24 | Hoya株式会社 | 内視鏡用バイポーラ型高周波処置具 |
| US7270664B2 (en) | 2002-10-04 | 2007-09-18 | Sherwood Services Ag | Vessel sealing instrument with electrical cutting mechanism |
| US7753909B2 (en) | 2003-05-01 | 2010-07-13 | Covidien Ag | Electrosurgical instrument which reduces thermal damage to adjacent tissue |
| US8128624B2 (en) | 2003-05-01 | 2012-03-06 | Covidien Ag | Electrosurgical instrument that directs energy delivery and protects adjacent tissue |
| JP5137230B2 (ja) | 2003-05-15 | 2013-02-06 | コヴィディエン・アクチェンゲゼルシャフト | 非伝導性可変停止部材を備えた組織シーラーおよび組織をシールする方法 |
| JP4253540B2 (ja) | 2003-07-24 | 2009-04-15 | オリンパス株式会社 | 医療器械 |
| US7252667B2 (en) | 2003-11-19 | 2007-08-07 | Sherwood Services Ag | Open vessel sealing instrument with cutting mechanism and distal lockout |
| US20050192611A1 (en) | 2004-02-27 | 2005-09-01 | Houser Kevin L. | Ultrasonic surgical instrument, shears and tissue pad, method for sealing a blood vessel and method for transecting patient tissue |
| US7645285B2 (en) | 2004-05-26 | 2010-01-12 | Idx Medical, Ltd | Apparatus and methods for occluding a hollow anatomical structure |
| DE202004009427U1 (de) | 2004-06-16 | 2004-08-12 | Richard Wolf Gmbh | Koagulationszange, insbesondere zur Tubensterilisation |
| DE102004031141A1 (de) * | 2004-06-28 | 2006-01-26 | Erbe Elektromedizin Gmbh | Elektrochirurgisches Instrument |
| DE102005034816A1 (de) | 2005-07-26 | 2007-02-01 | Aesculap Ag & Co. Kg | Koagulationsklemme für chirurgische Zwecke |
| DE102006042985A1 (de) | 2005-10-04 | 2007-04-19 | Erbe Elektromedizin Gmbh | Elektrochirurgisches Instrument |
| DE202006016837U1 (de) * | 2005-11-02 | 2007-01-11 | Olympus Winter & Ibe Gmbh | Endoskopische bipolare Zange mit Distanzstück |
| US7717914B2 (en) * | 2006-07-11 | 2010-05-18 | Olympus Medical Systems Corporation | Treatment device |
| JP2008058123A (ja) | 2006-08-31 | 2008-03-13 | Hitachi High-Technologies Corp | 自動分析装置 |
| WO2008045350A2 (en) | 2006-10-06 | 2008-04-17 | Tyco Healthcare Group Lp | Endoscopic vessel sealer and divider having a flexible articulating shaft |
| US8475453B2 (en) | 2006-10-06 | 2013-07-02 | Covidien Lp | Endoscopic vessel sealer and divider having a flexible articulating shaft |
| DE102007005359B4 (de) | 2007-02-02 | 2011-04-28 | Webasto Ag | Fahrzeug mit einem Brennstoffzellensystem, ein Brennstoffzellensystem und eine Sicherheitseinrichtung umfassende Anordnung und Verfahren zum Betreiben des Brennstoffzellensystems |
| CN201082191Y (zh) | 2007-09-17 | 2008-07-09 | 梅郎 | 组合式电极镊 |
| DE102008008309A1 (de) * | 2008-02-07 | 2009-08-20 | Olympus Winter & Ibe Gmbh | Endoskopische Zange mit Abstandhalter |
| DE102008018614B4 (de) | 2008-04-11 | 2012-06-28 | Hebumedical Gmbh | Klemme für elektrochirurgische Anwendungen |
| JP5380705B2 (ja) | 2008-05-15 | 2014-01-08 | 株式会社リバーセイコー | 内視鏡用高周波止血鉗子 |
| US8469956B2 (en) | 2008-07-21 | 2013-06-25 | Covidien Lp | Variable resistor jaw |
| US8795274B2 (en) | 2008-08-28 | 2014-08-05 | Covidien Lp | Tissue fusion jaw angle improvement |
| US7896214B2 (en) | 2008-09-23 | 2011-03-01 | Tyco Healthcare Group Lp | Tissue stop for surgical instrument |
| US8277446B2 (en) | 2009-04-24 | 2012-10-02 | Tyco Healthcare Group Lp | Electrosurgical tissue sealer and cutter |
| DE102009037614A1 (de) | 2009-08-14 | 2011-02-24 | Erbe Elektromedizin Gmbh | Elektrochirurgisches Instrument |
| DE102009037613A1 (de) | 2009-08-14 | 2011-02-24 | Erbe Elektromedizin Gmbh | Elektrochirurgisches Instrument |
| US8512371B2 (en) | 2009-10-06 | 2013-08-20 | Covidien Lp | Jaw, blade and gap manufacturing for surgical instruments with small jaws |
| BR112012003356B1 (pt) | 2010-02-04 | 2021-02-02 | Aesculap Ag | dispositivo eletrocirúrgico |
| US8979890B2 (en) | 2010-10-01 | 2015-03-17 | Ethicon Endo-Surgery, Inc. | Surgical instrument with jaw member |
| US8568408B2 (en) | 2011-04-21 | 2013-10-29 | Covidien Lp | Surgical forceps |
| DE102012100040A1 (de) | 2012-01-04 | 2013-07-04 | Aesculap Ag | Elektrochirurgisches Instrument und Maulteil hierfür |
| DE202012100017U1 (de) * | 2012-01-04 | 2012-03-22 | Aesculap Ag | Elektrochirurgisches Instrument und Maulteil hierfür |
| US9265514B2 (en) | 2012-04-17 | 2016-02-23 | Miteas Ltd. | Manipulator for grasping tissue |
| DE102014108914A1 (de) | 2014-06-25 | 2015-12-31 | Aesculap Ag | Elektrochirurgisches Instrument und Maulteil hierfür |
-
2012
- 2012-01-04 DE DE102012100040A patent/DE102012100040A1/de not_active Ceased
- 2012-12-27 WO PCT/EP2012/076945 patent/WO2013102602A2/de active Application Filing
- 2012-12-27 JP JP2014550685A patent/JP6167111B2/ja active Active
- 2012-12-27 US US14/370,553 patent/US10092350B2/en active Active
- 2012-12-27 EP EP12813879.9A patent/EP2800533B1/de active Active
- 2012-12-27 ES ES12813879T patent/ES2729552T3/es active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022115164A1 (de) | 2022-06-16 | 2023-12-21 | Olympus Winter & Ibe Gmbh | Chirurgisches Werkzeug und elektrochirurgisches Handinstrument sowie Verfahren zur Erkennung eines chirurgischen Werkzeugs |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015504734A (ja) | 2015-02-16 |
| DE102012100040A1 (de) | 2013-07-04 |
| US20140371743A1 (en) | 2014-12-18 |
| EP2800533B1 (de) | 2019-04-10 |
| WO2013102602A3 (de) | 2013-10-24 |
| WO2013102602A2 (de) | 2013-07-11 |
| EP2800533A2 (de) | 2014-11-12 |
| US10092350B2 (en) | 2018-10-09 |
| ES2729552T3 (es) | 2019-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6167111B2 (ja) | 電気外科器具とそのジョー部 | |
| JP6652940B2 (ja) | 電気外科器具及び電気外科器具用ジョー部 | |
| US20210298814A1 (en) | Jaw assemblies for electrosurgical instruments and methods of manufacturing jaw assemblies | |
| AU2005205794B2 (en) | Vessel sealing instrument with electrical cutting mechanism | |
| EP2409653B1 (en) | Vessel sealing instrument with electrical cutting mechanism | |
| ES2317347T3 (es) | Dispositivo sellador y divisor de tejido con dispositivo sellador y de corte rotatorio. | |
| JP5460967B2 (ja) | 電気的切除メカニズムを有する血管密封器具 | |
| JP2006501939A (ja) | 組織をシールし、そして切断するための電極アセンブリおよび組織をシールし、そして切断することを実施するための方法 | |
| JP2006501939A5 (ja) | ||
| US20230075224A1 (en) | Electrosurgical forceps including energized cutting element | |
| JP6182546B2 (ja) | アーチ状電極セクションを有する電気外科器具 | |
| AU2011226909B2 (en) | Vessel sealing instrument with electrical cutting mechanism |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141031 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151222 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161122 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161121 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170221 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170420 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170522 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170606 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170626 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6167111 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |