以下において、本発明の実施の形態について図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
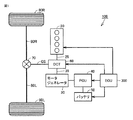
図1は、本発明の実施の形態に従うハイブリッド車両100の概略的な構成図である。ハイブリッド車両100は、エンジン20と、モータジェネレータ(以下、モータとも称する)30と、モータ制御ユニット((Power Control Unit)以下、PCUとも称する)40と、バッテリ50と、デュアルクラッチ式変速機(以下、DCTとも称する)60と、電子制御ユニット((Electronic Control Unit)以下、ECUとも称する)300とを備える。
モータジェネレータ30は、たとえば三相交流回転電機であり、バッテリ50からの電力に応じてトルクを発生すると共に、減速時には回生電力を発電可能に構成されている。
PCU40は、たとえば、コンバータやインバータを含んで構成され、ECU300からの制御信号に応じてモータジェネレータ30のトルクまたは回生電力を制御する。
バッテリ50は、再充電可能な直流電源であり、たとえば、ニッケル水素やリチウムイオンなどの二次電池やキャパシタを含んで構成される蓄電装置である。バッテリ50は、PCU40を介してモータジェネレータ30と電力の受給をする。
ECU300は、ハイブリッド車両100の各構成要素の動作を制御する。ECU300は、いずれも図1には図示しないがCPU(Central Processing Unit)、メモリなどの記憶装置および入出力バッファを含み、各センサ等からの信号の入力や各機器への制御信号の出力を行なうとともに、ハイブリッド車両100の各機器の制御を行なう。なお、これらの制御については、ソフトウェアによる処理に限らず、専用のハードウェア(電子回路)で処理することも可能である。
エンジン20には、回転駆動するエンジン出力軸25が設けられている。このエンジン出力軸25から出力されたトルクは、DCT60に伝達される。DCT60には、モータジェネレータ30のモータ出力軸35からのトルクが伝達される。DCT60には、たとえば複数の変速段G1〜G7が設けられている。DCT60における変速段G1〜G7の切換制御はECU300により行なわれる。ECU300は、これらの変速段G1〜G7から適切な変速比の変速段を選択する。そして、DCT60は、エンジン出力軸25およびモータ出力軸35から伝達されたトルクを、選択された変速段を介して、駆動出力軸としてのカウンタシャフトCSに伝達する。カウンタシャフトCSから出力されたトルクは、ディファレンシャル機構70および左右のドライブシャフト80L、80Rを介して駆動輪90L、90Rに伝達され、ハイブリッド車両100を走行させる。
図2は、図1のDCT60の変速機の構成を説明する図である。なお、基本的な構成は上述した特開2012−166574号公報とほぼ同様であるため、要部以外の詳細な説明は繰返さない。
DCT60は、前進7速、後進1速の並行軸方式の変速機であり、エンジン出力軸25と第1入力軸IMSとの間に第1クラッチC1が設けられ、エンジン出力軸25と第2入力軸SSとの間に第2クラッチC2が設けられる。第1クラッチC1および第2クラッチC2とは、たとえば、乾式のクラッチで構成される。
DCT60は、多軸構造により構成されていて、第1変速機構の第1入力軸IMSと、第1入力軸IMSの外筒を形成する外側入力軸OMSと、第2変速機構の第2入力軸SSと、出力軸としてのカウンタシャフトCSとを有している。このうち、第1入力軸IMSは、カウンタシャフトCSと共に、奇数段の変速段G1,G3,G5,G7を形成する。
第1入力軸IMSは、モータジェネレータ30のモータ出力軸35と一体となって回転するように結合されている。第1入力軸IMSは、第1クラッチC1を係合することにより、エンジン20のエンジン出力軸25のトルクを受け、変速段を介してカウンタシャフトCSへエンジンのトルクを伝達することができる。
また、第1入力軸IMSの外筒を形成する外側入力軸OMSは、平行に配置された第2入力軸SSと、アイドルシャフトIDSを介して噛合わされている。そして、第2入力軸SSは、カウンタシャフトCSと共に、第1入力軸IMSの変速段とは異なるギヤ比を有する偶数段の変速段G2,G4,G6を形成する。
DCT60は、第2クラッチC2を係合することにより、エンジン出力軸25のトルクをアイドルシャフトIDSからリバースシャフトRVSおよび第2入力軸SSに伝達する。リバースシャフトRVSは、後進時の走行用の後進変速段GR、またはオイルポンプOPにトルクを伝達する。
第1入力軸IMSの第1クラッチC1と反対側の端縁部には、プラネタリギヤ機構110が設けられている。プラネタリギヤ機構110は、複数のプラネタリギヤ112をそれぞれ回動自在に支持するキャリア113と、リングギヤ115と、サンギヤ111を有している。また、リングギヤ115には、第1ブレーキB1(以下、B1とも称する)が設けられている。第1ブレーキB1は、リングギヤ115の回転を規制または規制解除することにより、第1速の変速段G1または、第3速の変速段G3を選択可能とする。
第1速の変速段G1を確立するため、DCT60においては、第1ブレーキB1を、リングギヤ115の回転を規制した状態とすると、エンジン出力軸25の回転速度は、プラネタリギヤ機構110により減速されて、キャリア113から駆動ギヤ131に伝達される。駆動ギヤ131は、従動ギヤ51にトルクを伝達して、確立された第1速の変速段G1を用いてカウンタシャフトCSを回転させる。
また、第3速の変速段G3を確立するため、第1ブレーキB1は、リングギヤ115の回転の規制を解除するとともに、後述する同期機構により駆動ギヤ131と第1入力軸IMSとを連結させた第3速側連結状態とする。これにより、駆動ギヤ131は、従動ギヤ51にトルクを伝達して、確立された第3速の変速段G3を用いてカウンタシャフトCSを回転させる。
第1速の変速段G1および第3速の変速段G3におけるキャリア113およびプラネタリギヤ112などは、モータ出力軸35が回転すると、ともに連れ回ることにより、モータの回転子を含むモータ出力軸35、第1入力軸IMSとともに回転慣性となる。これら回転慣性を連れ回している際には、ギヤの噛み合いによる引き摺り損失、オイルの撹拌損失、モータの逆起電力など、回転に伴う損失が連続的に発生し得る。これら損失量は回転速度がゼロ速度とならない状態であっても、回転速度を低下させることにより減少させることができる。
DCT60に設けられた第1変速機構、第2変速機構およびプラネタリギヤ機構110の制御は、ユーザからの出力要求信号の入力に基づいて、ECU300により実行される。ECU300は、DCT60およびPCU40に制御信号を出力する。PCU40は、バッテリ50からの電力を用いてモータジェネレータ30を駆動する。
[変速制御の詳細]
次に、DCT60の変速制御について詳述する。
DCT60の変速制御は、第1入力軸IMSにより形成される奇数段の変速段または、第2入力軸SSにより形成される偶数段の変速段を交互に切換えるように第1クラッチC1または第2クラッチC2を選択的に係合または非係合とすることにより実行される。
たとえば、図2に示すDCT60で、第3速の変速段G3から第5速の変速段G5に変速段を変更(アップシフト)する場合を示して説明する。まず、変速段G3の駆動ギヤ131側の第1クラッチC1を係合状態から非係合状態として、第2クラッチC2を非係合状態から係合状態とする。これにより、エンジン20のトルクを伝達している伝達経路が第1入力軸IMSから、第2入力軸SSに切換えられる。第2入力軸SSに設けられている第4速の変速段G4を予め噛み合わせておく(以下、プレシフトとも称する)ことで、駆動ギヤ144が、カウンタシャフトCSの従動ギヤ53にエンジン20のトルクを伝達して回転させる。
その後、第3速の変速段G3の噛み合わせを解除して第5速の変速段G5を予め噛み合わせておき、再び第2クラッチC2を係合状態から非係合状態として、第1クラッチC1を非係合状態から係合状態とする。これにより、エンジン20のトルクを伝達している伝達経路が変速段G4から変速段G5に切換えられて、変速段G5の駆動ギヤ151からトルクが従動ギヤ53に伝達されてカウンタシャフトCSを回転させることができる。
この実施の形態の第1変速機構には、同期機構を構成する第1噛合機構SM1(以下、SM1とも称する)と第3噛合機構SM3(以下、SM3とも称する)とが、それぞれ第1入力軸IMS上にスライド可能に設けられている。また、第2変速機構には、第2入力軸SS上に、同期機構を構成する第2噛合機構SM2(以下、SM2とも称する)および第4噛合機構SM4(以下、SM4とも称する)が軸方向に沿ってスライド可能に設けられている。
第4噛合機構SM4は、第3速の変速段G3から、第4速の変速段G4への変速制御を行う前に軸方向に沿ってスライドして、駆動ギヤ144を第2入力軸SSに係合させる。第2入力軸SSは、カウンタシャフトCSと動力伝達が可能な回転速度となるように同期されてから、第2クラッチC2が結合されることにより、所望の変速段G4を用いてエンジン20のトルクをカウンタシャフトCSに伝達することができる。
また、第3噛合機構SM3は、第4速の変速段G4から、第5速の変速段G5への変速制御を行う前に軸方向に沿ってスライドして、駆動ギヤ151を第1入力軸IMSに係合させる。第1入力軸IMSは、カウンタシャフトCSとトルク伝達が可能な回転速度となるように同期されてから、第1クラッチC1を結合させることにより、所望の変速段G5を用いてエンジン20のトルクをカウンタシャフトCSに伝達することができる。
このように、DCT60の変速制御では、2つの第1クラッチC1,第2クラッチC2をつなぎ替える前に、各変速段G1〜G7に位置する第1噛合機構SM1〜第4噛合機構SM4が用いられて、第1入力軸IMSまたは第2入力軸SSの回転速度をカウンタシャフトCSに同期させるプレシフト制御が実行される。プレシフト制御により、第1入力軸IMSおよび第2入力軸SS間では交互にトルクの伝達経路が迅速に切換えられ、もたつき感および、変速ショックを低減させることができる。
図3は、図1に示すハイブリッド車両の変速タイミングを説明する変速線図である。変速線は、各変速段でのアップシフト線A(破線)、ダウンシフト線B(実線)、アッププレシフト線Cおよびダウンプレシフト線D(いずれも一点鎖線)を示し、車速と要求駆動力との関係に基づいて、どの時点で、変速制御としてのプレシフト制御、またはシフト制御を実行するかを示している。なお、プレシフト線は便宜上第1変速機構に設けられた奇数段の変速段G1,G3,G5,G7についてのみ示しているが、第2変速機構に設けられた偶数段の変速段G2,G4,G6についても同様となる。
各変速段の切換えは、車速と要求駆動力との関係に応じてECU300により行なわれる。たとえば、車速の増加によりアップシフト線を図3中の左方から右方へ横切ると、ECU300は、アップシフトを行なう。また、所定のヒステリシスが設けられたダウンシフト線を図3中の右方から左方へ横切ると、ECU300は、ダウンシフトを行なう。
さらに、変速線図では、各変速段の切換えの前に、車速の増加によりアッププレシフト線を図3中の左方から右方へ横切ると、ECU300は、予測される次の変速段への切換えに備えてプレシフト制御を行なう。また、所定のヒステリシスが設けられたダウンプレシフト線を図3中の右方から左方へ横切ると、ECU300は、予測される次の変速段への切り換えに備えてプレシフト制御を行なう。
図3に示す各段のプレシフト制御においては、変速される変速段と同じ入力軸の変速段(たとえば3速)から他方の入力軸(第2入力軸)の変速段(たとえば4速)に変速した直後に、次の変速段(たとえば5速または3速)への変速に備えて、第1入力軸IMSがカウンタシャフトCSに同期される。これにより、たとえば3速→4速→5速連続アップシフトや、5速→4速→3速連続ダウンシフトを短時間で実行可能とすることができる。
たとえば、増速中の期間VT1は、3速→4速のアップシフト後、ただちに3速→5速のアッププレシフトによる第1入力軸IMSの同期が開始されている。アッププレシフトにより予め同期が行なわれているため、4速へ変速段が変更された後、迅速に4速→5速のアップシフトを行なうことができる。
[プレシフト制御のタイミング]
変速制御で非係合状態となったクラッチ側の入力軸は、予測される次の変速段への切換えに備えて、非係合状態となった直後に予めプレシフト制御により同期が開始される。
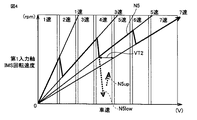
図4は、ECU300のプレシフト制御で、実際に第1入力軸IMSの回転速度が、奇数段の各変速段G1,G3,G5,G7の変化に合わせて上昇する様子が示される。図2,図4を参照して、各段のプレシフト制御は、変速される変速段と同じ入力軸の変速段(たとえば3速)から他方の入力軸(第2入力軸)の変速段(たとえば4速)に変速された直後から、次の変速段(たとえば5速)への変速に備えて(たとえば3速から5速へ)予め同期が行なわれる。すなわち、プレシフト制御では、奇数段への変速を行なう際には、第1入力軸IMSは第1噛合機構SM1または第3噛合機構SM3を係合させることによりカウンタシャフトCSの回転に同期されて、回転速度が上昇する。
第3速から第4速、第5速へ連続してアップシフトされることが想定される場合、ECU300は、プレシフト制御によって、予め第1入力軸IMSを、カウンタシャフトCSと同期させて、第5速の変速段G5を形成する駆動ギヤ151に対して、エンジン20のトルクを伝達する準備を行なう。第1入力軸IMSは、モータ出力軸35が一体に結合されているため、第4速で走行しているほとんどの期間VT2中、カウンタシャフトCSの従動ギヤ53が噛合う駆動ギヤ151とともにモータジェネレータ30のモータ出力軸35が連れ回りする。
第1入力軸IMSの回転によりモータ出力軸35が連れ回ると、変速段G5を形成している従動ギヤ53と駆動ギヤ151との間の噛合い抵抗などからエネルギ損失が発生してしまう。
連れ回りによるエネルギ損失としては、ギヤの噛合い抵抗の他にも、たとえば、ギヤ要素、係合要素の回転、トルク伝達に伴う損失、モータジェネレータ30が磁石モータである場合は、回転に伴う鉄損、逆起電力により発生する電圧がシステム電圧を超過する際には逆起電力発電に伴う損失、モータ出力軸35の出力トルクをゼロに近づける制御(ゼロトルク制御)を実施する際にはその電流を流すために発生する損失、パワー素子の通電制御に伴うPCU損失、回転変動を伴う場合は、回転慣性を持つ軸の回転速度を上下させるためのトルク発生に伴う電力損失、摩擦損失などの不可逆損失が挙げられる。
このように、プレシフト制御を行なうことにより、次の変速段へ迅速で円滑なアップシフト、ダウンシフトを行ない得るが、一方で様々なエネルギ損失も発生し得る。
そこで、本実施の形態では、第2入力軸SSに対応する変速段G2,G4,G6のいずれかを用いて出力軸(カウンタシャフトCS)にトルクを伝達して走行している状態において、モータ出力軸35が一体に結合されている第1入力軸IMSにカウンタシャフトCSからのトルクが伝達されないようにニュートラル化を行なう。ニュートラル化は、たとえば、次に切り換えられる変速段の候補に位置するたとえば、第3噛合機構SM3の同期が解除されて、第1入力軸IMSに対して駆動ギヤ151を回転自在な状態とすることにより行われる。
ニュートラル化により、従動ギヤ53とともに回転する駆動ギヤ151との同期が解除された第1入力軸IMSは、回転方向へのトルクが加わらないニュートラル状態となり、摩擦等により回転速度が低下する。
このため、第1入力軸IMSとともに、連れ回りしていたモータ出力軸35の回転速度を低減、または停止させることが可能となる。よって、連れ回りによるエネルギ損失を低減させることができる。したがって、奇数段の変速段G1,G3,G5,G7をトルク伝達に使用する必要のない状況では、ニュートラル化により第1入力軸IMSおよび各変速要素の回転を停止または減少させて、エネルギ損失を抑制できる。
本実施の形態を適用しない場合には、第3速の変速段G3から第4速の変速段G4への変速後に第4速から第5速へ変速するまでの間、図4の実線N5のようにプレシフトされて変速段G5のギヤ比で同期が図られる。これに対して、本実施の形態を適用すると、破線矢印N5lowのように第1入力軸IMSの回転速度を低下させる。
第1クラッチC1が解放されて第2入力軸SSから駆動力が伝達されている状態において、プレシフト制御による同期を解除するニュートラル化を行うことによって、第4速によって走行している一定の期間VT2に、モータ出力軸35が継続して長時間、連れ回されることを削減でき、エネルギ損失を減少させることができる。
[同期状態への復帰に伴うエネルギ損失]
一方で、奇数段への変速制御時に一律に同期制御を行なわず第1入力軸IMSをニュートラル化すると、第1入力軸IMSの回転速度が実質的にゼロ回転となりモータジェネレータ30によるトルクアシストやエネルギ回生を行なえなくなる。また、次の変速段への変速のために、最終的には第1入力軸IMSを同期させることが必要となるので、増速によるエネルギ損失が生じる。そのため、再同期時のエネルギ損失を考慮した上でニュートラル化するか否かを判定することが好ましい。
ECU300は、ニュートラル制御を行なう際、モータ出力軸35の連れ回りにより失われているエネルギ損失と、ニュートラル状態からの復帰の際に、次の変速段に同期させるために必要とされる増速によるエネルギ損失との大きさを比較してニュートラル化を実行するか否かを判断する。これにより、ニュートラル化によりトータル的にエネルギ損失が増加する場合には、ニュートラル化は行なわれないので、燃費効率を向上させることができる。
図5は、DCT60の変速制御にニュートラル制御を適用した様子を示し、ニュートラル制御が実行される場合と、実行されない場合の損失量の相違を説明するタイムチャートである。図5には、横軸に時間(t)が示され、縦軸には変速段と、ニュートラル状態判定信号(ONorOFF)、第1入力軸IMSの回転速度N、第1入力軸IMSにおける損失量および車速が示される。
図2,図5を参照して、本実施の形態が適用されない場合は、時刻t1で変速段が第3速から第4速に切換えられると、第3速の変速段G3側の第1クラッチC1の係合が解除され、時刻t2において、第1噛合機構SM1による係合が解除された第1入力軸IMSの回転速度Nが低下する。その後、回転速度Nは、時刻t3において、プレシフト制御により第5速に相当する変速段G5への同期が行なわれ再び増速を開始する。そして、時刻t4において、円滑に第2クラッチC2から第1クラッチC1へのつなぎ換えが行なわれて、第5速の変速段G5が形成される。
一方、本実施の形態を適用した場合には、第1クラッチC1が非係合となり、第2クラッチC2が係合されると、第2入力軸SSに対応する変速段G4からカウンタシャフトCSにトルクが伝達されながら走行している状態となる。時刻t1において変速段が第3速から第4速に切換えられた後、第1変速機構のプレシフト制御による第1入力軸IMSの同期が解除されて、第1入力軸IMSがニュートラル化される(図5の実線PN参照)。
ニュートラル化が行われると、第1入力軸IMSの回転速度Nが図中破線Nlowに示すように低下して、モータ出力軸35の連れ回りによるエネルギ損失が図5の実線PNに示すように低減する。損失の低減分P1は、第1入力軸IMSをニュートラル化している時間が大きくなるにつれて増大する。このように、第4速の変速段G4を用いて走行している間、可能な限り長い時間、第1入力軸IMSをニュートラル化して、第1入力軸IMSのエネルギ損失を抑制できるようにすることが好ましい。
一方で、ニュートラル化は、連れ回りによるエネルギ損失を軽減するためには有効であるが、ニュートラル状態からの復帰時において、第1入力軸IMSの回転速度を再び上昇させるために増速するエネルギが必要となる。増速に必要なエネルギがニュートラル化により低減されるエネルギ損失より大きいと、トータルとしては損失となる。そのため、第1入力軸IMSのニュートラル化を実施するにあたり、復帰の際のエネルギ損失を考慮することが好ましい。具体的には、第1入力軸IMSをニュートラル状態とした場合に、第1入力軸IMSをカウンタシャフトCSに同期させて変速可能な状態とするまでの増速に必要とされるモータジェネレータ30の消費電力量を、第1入力軸IMSをニュートラル状態としない場合の電力損失が上回ることが予測される場合に、第1入力軸IMSをニュートラル状態とする判断を行なう。
図5を参照して説明すると、第4速を変速段G4として選択中に第1入力軸IMSがニュートラル化されると、図中破線Nlowのように回転速度が減少し、これに伴って第1入力軸IMSに結合されているモータ出力軸35の回転速度も低下する。このとき、モータジェネレータ30に回生トルクを与えることにより、モータジェネレータ30の回転で電力を発生させ、積極的に電力回生を行なうことにより、電力量Pinとしてバッテリ50に蓄えることもできる。
一方で、ニュートラル状態を解除する時刻t4では、モータジェネレータ30を駆動して、所望の変速段G5の速度に同期させるように第1入力軸IMSを増速させなければならないため、図5の電力損回転上昇分Poutで示されるように、バッテリ50の電力が消費される。
この消費電力(Pout)と、電力回生により電気エネルギに変換された電力(Pin)との差分に相当する電力損失よりも、ニュートラル状態中に低減できる第1入力軸IMSの連れ回り損失の低減分P1が上まわる場合(P1>Pin+Pout(Poutは負値))には、トータルとしてニュートラル化によりエネルギ損失を低減できることになる。連れ回り損失の低減分P1は第4速走行の時間が長期化するほど大きくなるため、たとえば、車速やアクセル開度などの情報から第4速走行の時間を予測することでP1の量を予測することが可能となる。
逆に、P1<Pin+Pout(Poutは負値)の場合には、トータルとしてニュートラル化によりエネルギ損失が増加するため、そのような場合には、ニュートラル化を実施しないことが好ましい。
ニュートラル化を実施しないときには、エンジン20が最適ポイントで動作するようにモータジェネレータ30の負荷調整(アシスト/回生)が行なわれた場合のエネルギ損失をさらに考慮することが好ましい。
[ドライバビリティを考慮したニュートラル化判定]
ニュートラル化によって燃費性能が向上しても、DCT60特有の変速制御の迅速さや、変速ショックの少なさが失われることはドライバビリティの点から好ましくない。たとえば、ニュートラル状態から復帰する際に、同期速度と第1入力軸IMSの回転速度との速度差が大きいと、同期までに時間がかかってしまい、かえってドライバビリティを損なうことになり得る。
そのため、ハイブリッド車両100は、ニュートラル中の第1入力軸IMSの回転速度と同期速度との差が所定範囲内に収まるようにニュートラル状態においての目標回転速度を設定することがより好ましい。これにより、変速のもたつきや変速ショックを減少させることができる。
なお、この時、ニュートラル状態においてモータジェネレータ30の駆動が必要となるため、駆動による電力消費を考慮して、ニュートラル化するか否かを判断することが好ましい。
[ニュートラル解除後の速度設定]
ニュートラル状態から解除された後に、第1入力軸IMSが増速される場合には、次の変速段への同期が行なわれる。ニュートラル状態から解除された後に、第1入力軸IMSが減速される場合には、モータジェネレータ30で回生をすることでエネルギを蓄えることが好ましい。
第1入力軸IMSがニュートラル化されていない状態においては、図2に示すように、エンジン20の駆動トルクの一部は、係合されている第2クラッチC2、第2入力軸SSを経由して出力軸であるカウンタシャフトCSに伝達されている。そして、伝達された駆動トルクの一部を使うことによってモータジェネレータ30は、発電を行なうことができる。
モータジェネレータ30のトルクで、ハイブリッド車両100を加速させる場合には、次に選択される変速段は一般にプレシフト制御された高い変速段となるため、次の変速段に相当する第1入力軸IMSの目標回転速度が算出される。一方で、減速回生させる場合には、回生効率を高めて燃費効果を得るために、目標回転速度が高速回転速度となる変速段に限らず、低速回転速度の変速段が選択されることもあり得る。
たとえば、低速回転速度では、回生トルクは大きく出来るが回転速度は低速であるため、同期状態まで増速するエネルギ損失が多くなる。一方、高速回転速度では、回生トルクは小さくなるが、同期状態まで増速するためのエネルギは少なくて済む。ECU300は、回生時にニュートラル化を終了する際、同期後の回生効率を考慮して選択された高速段または低速段の変速段に基づいて第1入力軸IMSの目標回転速度を決定する。
上記のようなニュートラル状態の回転速度の設定を行なうことにより、ハイブリッド車両100は、以下のような変速制御処理を実行する。それにより、ニュートラル化によってエネルギ損失を減少させつつ、解除後の回生を実行することにより燃費効果を向上させることができる。
[変速制御処理の詳細]
図6は、実施の形態に従うハイブリッド車両100のECU300によって実行される変速制御処理を説明するフローチャートである。図6に示されるフローチャートは、ECU300に予め格納されたプログラムが所定周期で実行されることによって、DCT60の変速段制御処理が実現される。あるいは、一部のステップ(以下、ステップをSと略する)については、専用のハードウェア(電子回路)を構築して処理を実現することも可能である。
図6を参照して、S10にて、ECU300は、図1に示すDCT60の切換制御を行なうために、ハイブリッド車両100の運転状態の情報を取得する。情報は、ユーザのアクセル、ブレーキ、シフト操作状態、ハイブリッド車両100の速度や、バッテリ50の充電状態(以下、SOC(State of Charge)とも称する。)あるいは温度、エンジン20の運転状態、DCT60内の各回転要素の回転速度、クラッチ、ブレーキの作動状態、回生要求の有無などを含む。
S20にて、ECU300は、S10で取得したハイブリッド車両100の運転状態の情報からDCT60の第1入力軸IMSがニュートラル状態であるか否かを判定する。S20にて、第1入力軸IMSがニュートラル状態でないと判定されると(S20にてNO)、S30に処理が進められ、ECU300は、第1入力軸IMSのニュートラル化を実施するか否かを判定する。第1入力軸IMSのニュートラル化を実施する場合(S30にてYES)には、次のS40に進んで、ECU300は第1入力軸IMSのニュートラル化を実施する。
一方、S30にて、第1入力軸IMSのニュートラル化を実施しない場合(S30にてNO)には、ECU300によって制御は戻されて(リターン)、S10から処理が繰返される。第1入力軸IMSのニュートラル化を実施するか否かを判断する処理については、図8に示すフローチャートを用いて後述する。
ECU300は、S20にて、第1入力軸IMSがニュートラル状態であると判定する(S20にてYES)と、S50にて、ニュートラル中の第1入力軸IMSの目標回転速度を算出する。上述のように、ECU300は、ドライバビリティの悪化を抑制するために速度差が所定範囲内になるように第1入力軸IMSの目標回転速度を設定する。
S60にて、ECU300は、ニュートラル状態から解除された後の第1入力軸IMSの目標回転速度を算出する。具体的には、上述のように、モータジェネレータ30を用いた駆動出力で、ハイブリッド車両100を走行させる場合、プレシフト制御された変速段に相当する第1入力軸IMSの目標回転速度が算出される。ニュートラル解除後に回生となる場合には、回生効率が最大となる変速段に相当する速度が算出される。その後、処理がS70に進められる。
S70にて、ECU300は、車速と要求駆動力に基づいてニュートラル状態を解除するか否かを判断する。現在のギヤ段選択状態では、要求駆動力を実現できない場合、モータジェネレータ30を用いた充電が必要な場合、回生要求発生時など、変速が必要な状況であるか否かにより、ニュートラル解除をするか否かを判定する。ECU300は、第1入力軸IMSをニュートラル状態から解除しない場合(S70にてNO)は、S80に処理を進める。
S80にて、ECU300は、モータジェネレータ30を用いた第1入力軸IMSの回転速度の制御を実施するか否かを判定する。具体的には、ECU300は、上述したS50で求められた第1入力軸IMSの目標回転速度と、現在の第1入力軸IMSの回転速度との差が予め設定された許容回転速度差の一定範囲内に収まるか否かを判定する。
第1入力軸IMSの現在の回転速度と第1入力軸IMSの目標回転速度との差が小さい場合(S80にてNO)には、ECU300と第1入力軸IMSの回転速度の制御が不要と判断される。この場合、ECU300によって制御は戻されて(リターン)、処理が繰返される。
ECU300にて、第1入力軸IMSの現在の回転速度と第1入力軸IMSの目標回転速度との差が大きい場合(S80にてYES)には、ECU300は、次のS90に処理を進めて、第1入力軸IMSの回転速度制御を行なって目標速度に同期させる。モータジェネレータ30による第1入力軸IMSの回転速度の制御が行なわれた後、制御は戻されて(リターン)、処理が繰返される。
一方、変速要求に応じて第1入力軸IMSをニュートラル状態から解除する場合(S70にてYES)は、ECU300は、処理をS100に進め、モータジェネレータ30を用いた第1入力軸IMSの回転速度の制御を実施するか否かを判定する。回転速度制御の可否の判定は、たとえば、上述したS60で算出されたニュートラル状態から解除された後の第1入力軸IMSの目標回転速度と、第1入力軸IMSの現在の回転速度との差が許容回転速度差の範囲内であるか否かにより判定される。
S100にて、ECU300は、回転速度の差が小さい場合には、モータジェネレータ30による第1入力軸IMSの回転速度の制御を行なわない。ECU300は、モータジェネレータ30を用いた第1入力軸IMSの回転速度の制御を実施しない場合(S100にてNO)、S110をスキップして処理をS120に進める。
回転速度差が大きくモータジェネレータ30による第1入力軸IMSの回転速度の制御を行なう場合(S100にてYES)、ECU300は、次のS110に処理を進めて、上述のS60で設定したニュートラル解除後の第1入力軸IMSの目標回転速度となるように第1入力軸IMSの回転速度を制御する。
S120にてECU300は、ニュートラル状態が解除されたギヤ段を用いて、第1入力軸IMSに対するギヤ段の係合を許可するか否かを判定する。ECU300は、S120にて、変速時のもたつき、変速ショックあるいは、第1クラッチC1,第2クラッチC2の係合における耐久性、ギヤ段同期機構の耐久性などを考慮して予め設定された許容回転速度差の目標値以内に、ニュートラル状態が解除されている第1入力軸IMSと係合するギヤとの回転速度差が入っているか否かに基づいて、係合を許可するか否かを判定する。
ECU300は、係合を許可する場合(S120にてYES)には、次のS130に処理を進め、係合を許可しない場合(S120にてNO)には、次のS130〜S140をスキップして制御はメインルーチンに処理を戻す。
S130にて、ECU300は、制振制御を行なうか否かを判定する。制振制御は、係合する際の差回転に応じて発生するトルクの変動を予測し、それをモータジェネレータ30から出力するトルクで補うために行なわれる。
制振制御を実施する場合(S130にてYES)、ECU300は、処理をS140に進めて、制振制御に用いるモータジェネレータ30のトルクを算出する。ECU300は、トルクを算出する際、たとえば第1入力軸IMSとギヤとが係合する際の回転速度差に応じて発生するトルクの変動を予測し、モータジェネレータ30から出力するトルクで変動を打消すことにより、振動が有効に抑制されるように、どの程度のトルクをどのタイミングで出力するかを演算する。その後、S150に進む。
また、制振制御を実施しない場合(S130にてNO)、ECU300は、S140をスキップして処理をS150に進める。
S150にて、ECU300は、次のギヤ段同期機構を目標の変速段に係合させる。これにより、選択された変速段を介してモータジェネレータ30のトルクが所望の減速比によってカウンタシャフトCSから出力可能となる。
以下、図6のS20,S30,S50,S60の処理の詳細について説明する。
[ニュートラル状態の判定]
図7は、図6のS20にて実行される処理の詳細を示すフローチャートである。
図7を参照して、S21にて、ECU300は、シフト位置が走行レンジ(Dレンジ)か否かについて判定する。シフト位置がDレンジである場合(S21にてYES)には、ECU300は、S22に処理を進め、第1クラッチC1が非係合であるか否を判定する。
第1クラッチC1が非係合である場合(S22にてYES)には、ECU300は、S23に処理を進め、SM1,SM3,B1,SMRが全て非係合か否かを判定する。SM1,SM3,B1,SMRが全て非係合である場合(S23にてYES)には、S24にECU300は処理を進め、第1入力軸IMSがニュートラル状態であると判定する。その後、図6のS50に戻り、処理が繰返される。
S21,S22,S23のいずれかにおいてNOの場合は、S25にてECU300は、第1入力軸IMSがニュートラル状態でないと判定する。そしてその後、図6のS30に戻り、処理が繰返される。
[ニュートラル化の実施]
図8は、図6のS30にて実行されるニュートラル化の処理の詳細を示すフローチャートである。図8を参照して、ECU300は、S31にて車両情報を取得し、S32にて、取得した車両情報からニュートラル化する前提条件が成立しているか否かについて判定を行なう。具体的には、シフトポジションがDレンジ(前進走行レンジ)、第1クラッチC1非係合、第2クラッチC2係合、偶数ギヤ段係合、バッテリSOCが所定範囲内、車速、アクセル操作量が所定範囲内などの状態が成立しているか否かを判断する。S32にてニュートラル化の前提条件が成立している場合(S32にてYES)には、ECU300は処理をS33に進めて、上述のように、ニュートラル化による回生/増速/連れ回り防止によって、燃費効果が有るか否かの判定を行なう。
燃費効果が有ると見込める場合(S33にてYES)には、ECU300は処理をS34に進めて、第1入力軸IMSのニュートラル化を許可する。そして、その後、図6のS40に戻り(リターン)、ECU300は第1入力軸IMSのニュートラル化を実施する。
一方、S32にて、ニュートラル化の前提条件が成立していない場合(S32にてNO)、または、ニュートラル化によって、燃費効果が見込めないと判定された場合(S33にてNO)、ECU300は、S35にて、第1入力軸IMSのニュートラル化を不可とする。その後、図6のS10に戻り、処理が繰返される。
[目標回転速度の算出]
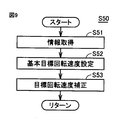
図9は、図6のS50にて実行されるニュートラル中の第1入力軸IMSの目標回転速度を算出するための処理の詳細を説明するためのフローチャートである。図9を参照して、ECU300は、第1入力軸IMSの目標回転速度の算出の処理を開始すると、S51にて、前述の車両状態の情報の他に、たとえば後進変速段GR、リバースシャフトRVSを介して接続されるオイルポンプOP駆動に要求される回転数などの、車両状態の情報取得を行なう。
その後、S52にて、ECU300は、取得された情報に基づいてニュートラル中の第1入力軸IMSの基本目標回転速度を設定する。ここでは、ECU300にて、第1入力軸IMSの回転速度は、ニュートラル中、基本としてゼロ回転が目標として設定される。その後、ECU300は、処理をS53に進める。
S53にて、ECU300は、ドライバビリティ要求や潤滑要求などを考慮して、第1入力軸IMSの目標回転速度となるように主に増速させる側に基本目標回転速度を補正する。補正により、プレシフト制御されている状態の回転速度とニュートラル中の第1入力軸IMSの回転速度との差が大きい場合であっても、予め設計的に許容される許容回転速度差に補正して、もたつきや変速ショックを低減させることができる。
ECU300は、第1入力軸IMSの基本目標回転速度をゼロ回転に設定しているが、オイルポンプOPの作動が必要とされる場合には、ゼロ回転より大きい速度としてもよい。
[ニュートラル解除後の目標回転速度の算出]
図10は、図6におけるS60の処理の詳細を示すフローチャートである。S61にて、ECU300は、ニュートラル状態を解除した後にプレシフト制御により同期すべき変速ギヤ段の情報、たとえば車両走行状態の情報や、あるいは要求駆動力などの情報を取得する。S62にて、ECU300は、取得されたプレシフト制御中のギヤ段の情報に基づいて、ニュートラル状態を解除した後に同期すべきギヤ段を算出する。ギヤ段は、モータジェネレータ30を用いた走行駆動制御と回生制御を行なう場合により異ならせてもよい。たとえば、モータジェネレータ30を用いた走行駆動制御を行なう場合は、高速側の変速段G5を、また、回生制御を行なう場合には、低速側の変速段G3を用いるように構成してもよい。その後、処理がS63に進められて、ECU300は第1入力軸IMSの目標回転速度を算出する。たとえば、第1入力軸IMSの回転速度は、予めニュートラル状態を解除する時点における第1入力軸IMSの目標回転速度として、プレシフト制御中のギヤ段に適合するように設定される。
上述してきたように、本実施の形態のハイブリッド車両100において、第2変速機構の偶数段の変速段を用いてエンジン20のトルクを伝達している場合には、ECU300は、第1変速機構のプレシフト制御による同期を解除すると共に、第1クラッチC1を非係合として第1入力軸IMSをニュートラル状態とする。これにより、プレシフト制御時のモータ出力軸35の連れ回りを防止して、エンジン20のエネルギ損失を低減できる。
なお、この実施の形態の車両として、DCT60に1つのモータジェネレータ30を用いた変速装置を示して説明してきたが、特にこれに限らず、2つまたはそれ以上のモータを用いて構成されていてもよい。また、変速装置として前進7速で構成されるDCT60を用いて説明してきたが、たとえば前進5速で構成されるDCTなど、変速ギヤ段が何段であってもよい。
また、変速の一例として、第4速から第5速への変速例を示して説明してきたが、特にこれに限らず、第2速または第4速から第3速へ、あるいは第6速から第5速または第7速へなど、偶数段の変速段から奇数段へのいずれの変速にも適用可能である。
最後に、本発明の実施の形態のハイブリッド車両100について総括する。図1を参照して、実施の形態のハイブリッド車両100は、エンジン20と、バッテリ50からの電力の供給でモータ出力軸35を回転駆動するモータジェネレータ30と、エンジン20のエンジン出力軸25およびモータ出力軸35から入力されたトルクを、複数の変速段のうちの選択された変速段を介して、カウンタシャフトCSから出力するDCT60と、DCT60を制御するECU300とを備える。DCT60は、モータ出力軸35と一体に結合される第1入力軸IMSと、第2入力軸SSと、エンジン出力軸25からのトルクを、それぞれ第1入力軸IMSおよび第2入力軸SSにつなぎ替えて伝達する第1クラッチC1および第2クラッチC2と、第1クラッチC1および第2クラッチC2を切換える際に、選択された変速段に応じて予め第1入力軸IMSまたは第2入力軸SSの回転速度をカウンタシャフトCSと同期させる第1噛合機構SM1〜第4噛合機構SM4とを含む。ECU300は、第1クラッチC1を非係合とするとともに、第2クラッチC2を係合して、第2入力軸SSに対応する変速段からカウンタシャフトCSにトルクを伝達しながら走行している場合に、第1入力軸IMSの同期を解除して第1入力軸IMSをニュートラル状態とする。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。