以下、本発明の実施形態を図面に基づいて詳述する。図1〜図19は本発明をパチンコ機に採用した第1の実施形態を例示している。図1において、遊技機本体1は、矩形状の外枠2と、この外枠2の左右一側、例えば左側のヒンジ3を介して縦軸心廻りに開閉及び着脱自在に枢着された前枠4とを備えている。
前枠4には、その上部側に遊技盤5が着脱自在に装着され、下部側に発射手段6等が配置されており、その前枠4の前側には、遊技盤5の前側を覆うガラス扉7と、そのガラス扉7の下側で発射手段6等の前側を覆う下部開閉扉8とがヒンジ3と同じ側のヒンジ9により開閉及び着脱自在に枢着されている。
下部開閉扉8の前側には、発射用の遊技球を貯留して発射手段6に供給する球貯留皿10と、発射手段6を作動させるための発射ハンドル11とが設けられている。また、ガラス扉7には、遊技盤5の前面側の遊技領域12に対応するガラス窓13が設けられている。
遊技盤5の前面には、発射手段6から発射された遊技球を案内するガイドレール14が円弧状に配置されると共に、そのガイドレール14の内側の遊技領域12内に中央表示装置15、普通図柄始動手段16、第1特別図柄始動手段17、第2特別図柄始動手段18、大入賞手段19、普通入賞手段20等の各種遊技部品が配置されている。普通図柄始動手段16は遊技球が通過可能なゲート、第1特別図柄始動手段17及び普通入賞手段20は非開閉式の入賞手段、第2特別図柄始動手段18及び大入賞手段19は開閉式の入賞手段により構成されており、入賞手段17〜20に遊技球が入賞した場合には、それぞれ所定個数の賞球が払い出されるようになっている。
中央表示装置15は、遊技盤5に対して前側から着脱自在に装着される前構造体21と、液晶式その他の画像表示手段22を備え且つ前構造体21に対応して遊技盤5の裏側に着脱自在に装着される裏構造体23(図2参照)とを備えている。裏構造体23は、図2,図3等に示すように、前側が開放した略箱形に形成され且つその後壁24の略中央に後表示窓25が形成された裏ケース26と、表示画面22aを後表示窓25に略一致させた状態で裏ケース26の背面側に着脱自在に固定される画像表示手段22と、裏ケース26の内側で後壁24の前側に配置される可動演出ユニット27とを備えており、前構造体21の後側に対応するように遊技盤5の裏側に位置決めされた状態で、裏ケース26の前端側に設けられた固定フランジ28においてねじ止め等により遊技盤5の裏面に着脱自在に固定されている。
前構造体21は、図1に示すように、略中央に画像表示手段22に対応する前表示窓31が形成された表示枠32、この表示枠32の下部側に沿って左右方向に配置され且つ入球口33に入球した遊技球を左右方向に転動させて前側に落下させるステージ34等を備えると共に、普通図柄表示手段35、特別図柄表示手段36等の各種表示手段が設けられている。
普通図柄表示手段35は普通図柄を変動表示するためのもので、複数種類の普通図柄(例えば2種類の「○」「×」)に対応する複数個の発光素子により構成されており、普通図柄始動手段16が遊技球を検出することを条件に2つの発光素子が交互に点灯するように所定時間点滅して、普通図柄始動手段16による遊技球検出時に取得した当たり判定乱数値が予め定められた当たり判定値と一致した場合に当たり態様である「○」側の発光素子が点灯し、それ以外の場合に外れ態様である「×」側の発光素子が点灯して停止するようになっている。普通図柄が当たり態様で停止した場合には、第2特別図柄始動手段18が所定時間開放する。
特別図柄表示手段36は、1個又は複数個、例えば1個の特別図柄を変動表示するためのもので、7セグメント式等の表示手段により構成されており、非開閉式の第1特別図柄始動手段17と開閉式の第2特別図柄始動手段18との何れかに遊技球が入賞することを条件に特別図柄を所定時間変動表示して、第1,第2特別図柄始動手段17,18への遊技球入賞時に取得された大当たり判定乱数値が予め定められた大当たり判定値と一致した場合には所定の大当たり態様で、それ以外の場合には外れ態様で停止するようになっている。特別図柄が大当たり態様で停止した場合には、大入賞手段19が所定の開閉パターンに従って開放する。
また、画像表示手段22上では、特別図柄表示手段36による特別図柄の変動と同期して、1又は複数個、例えば左右方向に3個の演出図柄37a〜37cによる変動表示が行われるようになっている。即ち、演出図柄37a〜37cは特別図柄表示手段36による特別図柄の変動開始と同時に所定の変動パターンに従って変動を開始すると共に、特別図柄の変動停止と同時に最終停止するように、左、右、中等の所定の順序で停止する。なお、特別図柄表示手段36による特別図柄の変動表示中であっても、画像表示手段22上でその特別図柄の変動と直接関係のない演出を行う場合があってもよい。
可動演出ユニット27は、画像表示手段22上での演出図柄37a〜37cの変動表示と同期して可動体による演出を行うためのもので、例えば画像表示手段22の表示画面22aの左右両縁部に沿って上下方向に配置される一対の可動装置41a,41bを備え、例えば裏ケース26の後壁24から前向きに突設された複数の支持基部42に対してねじ止め等により着脱自在に固定されている。なお、左右の可動装置41a,41bは、後表示窓25の上縁部に沿ってその上側に配置された左右方向の上連結板43と、後表示窓25の下縁部に沿ってその下側に配置された左右方向の下連結板44とによって上端部側及び下端部側において互いに連結されている。
本実施形態では、左右の可動装置41a,41bは互いに略左右対称に構成されているため、以下の説明では主に右側の可動装置41bの構成を図面に基づいて説明する。なお、左右の可動装置41a,41bにおける互いに対応する構成部分については同一の符号を用いている。
可動装置41b(及び可動装置41a)は、図4,図5等に示すように、後ベース45と前カバー46とで構成されるケース体47を有し、そのケース体47上に、昇降移動可能に設けられた第1可動体(可動体)48と、同じく昇降移動可能に設けられた第2可動体(可動体)49と、第1可動体48を「第1位置」で解除可能にロックする第1ロックレバー(第1ロック手段)50と、第2可動体49を「第2位置」で解除可能にロックする第2ロックレバー(第2ロック手段)51と、第1,第2ロックレバー50,51によるロックを解除するためのロック解除リンク(ロック解除手段)52と、第1,第2可動体48,49をそれぞれ第1,第2位置まで押し上げる機能及びロック解除リンク52をロック解除方向に移動させる機能を有する移動体53と、この移動体53を駆動する駆動手段54と、駆動手段54の駆動力を移動体53に伝達する駆動伝達手段55と、第2可動体49が第2位置にあることを検出する上部位置検出手段56と、移動体53が下部側の所定位置にあることを検出する下部位置検出手段57とを備えている。
ケース体47を構成する後ベース45は、遊技盤5と略平行に形成された縦長板状の背壁61と、この背壁61の外縁に沿って設けられた後周壁62とを一体に備えている。また、同じくケース体47を構成する前カバー46は、背壁61に対向する前壁63と、後周壁62に対応して前壁63の外縁に沿って設けられた前周壁64とを一体に備えている。ケース体47は、後ベース45と前カバー46とを前後方向に対向させた状態で互いにねじ止め等により固定することにより、前後に扁平な縦長箱形に形成されており、その内部に、第1,第2可動体48,49と移動体53とを上下方向に案内する昇降路65(図5参照)が形成されると共に駆動伝達手段55等が収容されている。なお、左右の可動装置41a,41bを連結する上下の連結板43,44は、例えば後ベース45に一体に形成されている。
昇降路65は、上下方向に配置されたガイドシャフト66に沿ってその前側の前壁63と後側の背壁61との間に設けられている。ガイドシャフト66は、例えば断面円形状に形成され、例えばケース体47内の表示画面22a側(右側の可動装置41bでは左側)縁部に沿って配置されており、その上下両端部において、ケース体47内に設けられた一対のシャフト支持部67,68により着脱自在に支持されている。
ケース体47上には、昇降路65に対応して前壁63から前向きに膨出する膨出部58が、表示画面22a側の縁部に沿って縦長状に形成されている。また、前壁63の前面側で且つ膨出部58に対して表示画面22aとは反対側に隣接する部分は、第1,第2ロックレバー50,51、ロック解除リンク52等が配置される縦長略平面状のロック機構配置面59となっている。
第1,第2可動体48,49は、第2可動体49が上側となるように,共通の昇降路65上に個別に昇降移動可能な状態で配置されており、図4〜図6に示すように、昇降路65に沿って昇降移動可能な摺動部69,70と、ケース体47の側面に形成された縦長状の開口部47a(図7〜図9等参照)を介して表示画面22a側に突出する演出体支持部71,72と、第1,第2ロックレバー50,51が係脱自在に係合する被係合部73,74とをそれぞれ一体に備えている。演出体支持部71,72の例えば先端側には、キャラクタ等の装飾が施された第1,第2可動演出体75,76(図2,図3等参照)が配置されている。そして、第2可動体49の「第2位置」と第1可動体48の「第1位置」とは、昇降路65の上部側で上下に隣接しており、例えば第1可動体48が第2可動体49を押し上げつつ第1位置に達したとき、第2可動体49も第2位置に達するようになっている。
摺動部69,70は、図6〜図9等に示すように、例えばガイドシャフト66の後側で後ベース45の前面側に沿って配置され且つ表示画面22a側端部に演出体支持部71,72が設けられた摺動ベース板77,78と、この摺動ベース板77,78における表示画面22aとは反対側の端部から前向きに延設された上下方向の突設板79,80と、摺動ベース板77,78の前面側にガイドシャフト66に沿って設けられたシャフト摺動部81,82とを備えている。
シャフト摺動部81,82は、ガイドシャフト66に対して後側から摺接する例えば断面コの字型のガイド溝81a,82aと、そのガイド溝81a,82aの例えば上下両側に設けられ且つガイドシャフト66の前面側に摺接する断面略U字状の前ガイド81b,82bとを備えており、それらガイド溝81a,82aと前ガイド81b,82bとの間にガイドシャフト66が上下方向に挿通している。また、摺動ベース板77,78の背面側には、後ベース45の前面側に略摺接する後突条部77a,78aが例えば左右両縁部に沿って上下方向に配置され、また突設板79,80の前縁側には、前カバー46の背面側に略摺接する前突条部79a,80aが上下方向に配置されている。
被係合部73,74は、摺動部69,70の下部側に前向き突出状に一体形成されており、表示画面22aとは反対側に斜め上向きの案内面73a,74aが、下面側に略水平な係合面73b,74bがそれぞれ設けられた正面視略直角三角形状に形成されている。この被係合部73,74は、例えばシャフト摺動部81,82の一側、例えば表示画面22aとは反対側に配置されており、図8,図9に示すように前突条部79a,80aよりも前方に突出して、その先端部が膨出部58内に達している。
膨出部58は、第1,第2可動体48,49の昇降動作に伴う被係合部73,74の可動範囲に対応して縦長状に設けられており、表示画面22aと反対側、即ちロック機構配置面59側の側壁58aが、被係合部73,74と近接している。膨出部58の側壁58a上には、第1可動体48が第1位置にきたときの被係合部73の位置に対応して第1ロック窓84が、第2可動体49が第2位置にきたときの被係合部74の位置に対応して第2ロック窓85が、それぞれ開口状に形成されている。
また、第2可動体49上には、上部位置検出手段56に対応する被検出部86が、例えば摺動部70の前側に一体に突設されている。上部位置検出手段56は、例えば透過型フォトセンサで、透光部56aと受光部56bとがケース体47内で例えば左右に対向するように昇降路65の上部側に配置され、例えば前カバー46上における膨出部58の上側に着脱自在に固定されており、第2可動体49上の被検出部86を検出することによりONとなり、第2可動体49が第2位置を含む一定範囲内にあることを検出可能となっている。
移動体53は、昇降路65上で且つ第1可動体48の下側に第1,第2可動体48,49とは別個に昇降移動可能な状態で配置されており、図6,図7,図10等に示すように、昇降路65上に昇降移動可能に配置される摺動部87と、ロック解除リンク52を押し下げるための押し下げ部88と、駆動伝達手段55の駆動ベルト89を固定するためのベルト固定部89aと、下部位置検出手段57に対応する被検出部90とを備えている。
そしてこの移動体53は、駆動手段54の駆動により、昇降路65の上部側の「押し上げ完了位置」(図14(E)に実線で示す)と、下部側の「押し下げ待機位置」(図12(A)に二点鎖線で、図14(F)に実線でそれぞれ示す)、「第1押し下げ位置」(図12(A),(B)に実線で示す)及び「第2押し下げ位置」(図13(C),(D)に実線で示す)とを含む所定の可動範囲内で昇降駆動されるようになっている。ここで、「押し上げ完了位置」(所定の上昇位置の一例)は第1可動体48の第1位置の下側に隣接しており、駆動手段54の駆動により移動体53が第1,第2可動体48,49を押し上げつつこの「押し上げ完了位置」に達したとき(図14(E)参照)、第1可動体48が第1位置に、第2可動体49が第2位置にそれぞれ達するようになっている。また、「第1押し下げ位置」は「押し下げ待機位置」よりも下側に配置され、「第2押し下げ位置」は「第1押し下げ位置」よりも更に下側に配置されている。
摺動部87は、例えばガイドシャフト66の後側で後ベース45の前面側に沿って配置された摺動ベース板91と、この摺動ベース板91の前面側にガイドシャフト66に沿って設けられたシャフト摺動部92とを備えている。シャフト摺動部92は、ガイドシャフト66に対して後側から摺接する例えば断面コの字型のガイド溝92aと、そのガイド溝92aの例えば上下両側に設けられ且つガイドシャフト66の前面側に摺接する断面略U字状の前ガイド92bとを備えており、それらガイド溝92aと前ガイド92bとの間にガイドシャフト66が上下方向に挿通している。また、摺動ベース板91の背面側には、後ベース45の前面側に略摺接する後突条部91aが例えば左右両縁部に沿って上下方向に配置されている。
押し下げ部88は、摺動部87上の例えば表示画面22aとは反対側の端部側に前向き突出状に形成されている。また押し下げ部88には、例えばその前面側に、前カバー46の背面側に略摺接する前突条部88aが上下方向に配置されており、またその側面側にベルト固定部89aが設けられている。
被検出部90は、例えば摺動部87の前側に一体に突設されている。下部位置検出手段57は、例えば透過型フォトセンサで、透光部57aと受光部57bとがケース体47内で例えば左右に対向するように昇降路65の下部側に配置され、例えば前カバー46上における膨出部58の下側に着脱自在に固定されており、移動体53上の被検出部90を検出することによりONとなり、例えば移動体53が「押し下げ待機位置」、「第1押し下げ位置」、「第2押し下げ位置」を含む一定範囲内にあることを検出可能となっている。
駆動手段54は、例えばステッピングモータで、図4,図5,図11等に示すように、例えば駆動軸54aをケース体47内に突出させた状態でケース体47の下部前側に後向きに固定されている。また、駆動手段54の駆動軸54aにはモータギヤ93が固定されている。
駆動伝達手段55は、図4,図5等に示すように、例えば下部側の駆動プーリ94と、上部側の従動プーリ95と、それら駆動プーリ94と従動プーリ95とに巻き掛けられた駆動ベルト89とを備えており、昇降路65に沿ってケース体47内の例えば表示画面22aとは反対側に配置されている。駆動ベルト89は、例えば無端状のギヤベルトで構成されており、その周上の所定箇所が、移動体53のベルト固定部89aに着脱自在に固定されている。
駆動プーリ94は、前カバー46と後ベース45との間に架設された前後方向のシャフト96によって回転自在に支持されており、その軸方向一端側のベルト駆動ギヤ94aに駆動ベルト89の下端側が巻き掛けられ、軸方向他端側の被駆動ギヤ94bにモータギヤ93が噛合している。
従動プーリ95は、ケース体47内に配置されたプーリスライダ97により、前後方向のピン98廻りに回転自在に支持されており、駆動ベルト89の上端側が巻き掛けられている。プーリスライダ97は、例えば後ベース45上に設けられた上下方向の案内レール99によって上下方向移動可能に支持されると共に、同じく後ベース45上に配置されたバネ100によって例えば上向きに弾性付勢されており、これによって駆動ベルト89に一定のテンションを付与するようになっている。
第1,第2ロックレバー50,51は、それぞれ第1,第2ロック窓84,85に対応してロック機構配置面59の前側に配置されており、図7〜図11等に示すように、例えばロック機構配置面59上に前向きに突設されたレバー軸101,102(図4参照)によって回転自在に支持される筒状等の軸装着部103と、この軸装着部103からロック機構配置面59に沿って例えば略上向きに突設された係脱レバー部104と、軸装着部103からロック機構配置面59に沿って例えば斜め下向きに突設された操作レバー部105と、係脱レバー部104の先端側から第1,第2ロック窓84,85側に突設された係合部106とをそれぞれ一体に備えている。そして、第1,第2ロックレバー50,51は、係合部106が第1,第2ロック窓84,85を介して膨出部58内に大きく突出する「ロック姿勢」(図7参照)と、係合部106が膨出部58の外側に退避する「ロック解除姿勢」との間で揺動自在であると共に、バネ107(図4,図5参照)によってロック姿勢側に弾性付勢されている。
第2ロックレバー51は、第2可動体49が第2位置まで上昇する途中で被係合部74の案内面74aに押されてロック解除姿勢側に退避した後、第2可動体49が第2位置に達したとき、バネ107の付勢力によってロック姿勢に復帰し、係合部106が被係合部74の係合面74bに下側から係合することにより、第2可動体49を第2位置でロックするようになっている。同様に、第1ロックレバー50は、第1可動体48が第1位置まで上昇する途中で被係合部73の案内面73aに押されてロック解除姿勢側に退避した後、第1可動体48が第1位置に達したとき、バネ107の付勢力によってロック姿勢に復帰し、係合部106が被係合部73の係合面73bに下側から係合することにより、第1可動体48を第1位置でロックするようになっている。なお、第1,第2ロックレバー50,51は、操作レバー部105を押し下げることによってロック姿勢からロック解除姿勢に移行する。
ロック解除リンク52は、上下方向に移動可能な状態でロック機構配置面59の前側に配置されており、図4,図5,図7〜図11等に示すように、第1ロックレバー50の操作レバー部105に対応する第1ロック解除部111と、第2ロックレバー51の操作レバー部105に対応する第2ロック解除部112と、移動体53の押し下げ部88に対応する被押し下げ部113と、それら第1,第2ロック解除部111,112及び被押し下げ部113を一体に連結するリンク本体114とを備えている。
リンク本体114は、第1,第2ロックレバー50,51における各操作レバー部105の端部近傍を通過するように上下方向に配置された上リンク部114aと、移動体53の押し下げ部88の移動経路に対応して上下方向に配置された下リンク部114bとを一体に備えており、第1,第2ロック解除部111,112はそれぞれ上リンク部114aから第1,第2ロックレバー50,51側に突設され、また被押し下げ部113は例えば下リンク部114bの下端側から後向きに突設されている。ロック機構配置面59上には、図4,図5及び図11に示すように被押し下げ部113に対応する開口部115が上下方向の長孔状に形成されており、被押し下げ部113はこの開口部115を経てケース体47内に突出している。
リンク本体114上には、例えば上下方向の長孔116が複数形成され、ロック機構配置面59上には、それら複数の長孔116にそれぞれ対応するガイド突起117が一体に形成されている。ロック解除リンク52は、それら長孔116にガイド突起117をそれぞれ後側から摺動自在に挿入させた状態で、ロック機構配置面59の前側に着脱自在に装着されていることにより、所定の可動範囲内で昇降移動可能となっている。
また、ロック解除リンク52は、バネ118によってケース体47に対して上向きに弾性付勢されており、移動体53が「押し下げ待機位置」を超えて下降する際に(図12(A),図13(C))、その移動体53の押し下げ部88がバネ118の付勢力に抗して被押し下げ部113を押し下げることによって下降するようになっている。
ここで、ロック解除リンク52の可動範囲内には、第1,第2ロックレバー50,51の何れのロックも解除しない「非解除位置」(図12(A)に二点鎖線で、図14(E),(F)に実線でそれぞれ示す)と、第1ロックレバー50によるロックを解除する「第1解除位置」(図12(A),(B)に実線で示す)と、第2ロックレバー51によるロックを解除する「第2解除位置」(図13(C),(D)に実線で示す)とが含まれている。
「非解除位置」は、ロック解除リンク52の可動範囲内の例えば上限位置に設定されており、ロック解除リンク52がこの非解除位置にあるときには、図7及び図14(F)に示すように第1,第2ロック解除部111,112はそれぞれ第1,第2ロックレバー50,51の操作レバー部105と干渉しないようになっている。なお、ロック解除リンク52は、移動体53によって押し下げられていない状態では、バネ118の付勢によってこの非解除位置に保持される。
「第1解除位置」は、非解除位置よりも下側に設定されており、移動体53の押し下げによってロック解除リンク52が非解除位置から下降する際に、まず第1ロック解除部111が第1ロックレバー50の操作レバー部105に上側から当接してこれを押し下げ、ロック解除リンク52がこの第1解除位置に達したときに第1ロックレバー50がロック解除姿勢となって(図12(A))、第1可動体48が移動体53上に自由落下する(図12(B))ようになっている。なお、この「第1解除位置」では第2ロック解除部112は未だ第2ロックレバー51と干渉せず、従って第2可動体49については第2位置でロックされた状態が維持される。
「第2解除位置」は、第1解除位置よりも更に下側に設定されており、移動体53の押し下げによってロック解除リンク52が第1解除位置を超えて下降する際に、第2ロック解除部112が第2ロックレバー51の操作レバー部105に上側から当接してこれを押し下げ、ロック解除リンク52がこの第2解除位置に達したときに第2ロックレバー51がロック解除姿勢となって(図13(C))、第2可動体49が先に落下した第1可動体48上に自由落下する(図13(D))ようになっている。
以上のように、ロック解除リンク52は、移動体53の押し下げにより、非解除位置から第1解除位置を経て第2解除位置に至るようになっている。このように「第1解除位置」と「第2解除位置」とが異なる位置に設定されていることで、移動体53の移動により、第1,第2可動体48,49を異なるタイミングで自由落下させることが可能である。
なお、移動体53の「第1押し下げ位置」、「第2押し下げ位置」がそれぞれロック解除リンク52の「第1解除位置」、「第2解除位置」に対応しており、また、押し下げ部88が被押し下げ部113に略当接するときの移動体53の位置が「押し下げ待機位置」に設定されているものとする。
図15は、画像表示手段22上における演出図柄37a〜37cによる演出及び可動装置41a,41bによる演出に関する制御系のブロック図である。演出制御手段121は、遊技進行を統括的に制御する遊技制御手段122から送信されるコマンドに基づいて、画像表示手段22上における演出図柄37a〜37cの変動演出とこれに対応する可動装置41a,41bによる演出(以下、「可動演出」という)とを制御するもので、演出図柄表示制御手段123、動作パターン選択手段124、駆動制御手段125等を備えている。
演出図柄表示制御手段123は、演出図柄37a〜37cの表示制御を行うもので、例えば遊技制御手段122から変動パターン指定コマンド及び停止図柄指定コマンドを受信した場合に、指定された変動パターンに基づいて演出図柄37a〜37cの変動を開始させると共に、変動停止コマンドを受信したときに、停止図柄指定コマンドで指定された停止図柄で演出図柄37a〜37cの変動を停止させるようになっている。
動作パターン選択手段124は、可動装置41a,41bによる左右二組の第1,第2可動体48,49の動作パターンを選択するもので、例えば遊技制御手段122から演出図柄37a〜37cに関する変動パターン指定コマンドを受信し、その変動パターン指定コマンドで指定された変動パターンが可動演出を伴うものであった場合に、その可動演出に対応する動作パターンを選択するように構成されている。なお、この動作パターン選択手段124を遊技制御手段122側に設け、遊技制御手段122から演出制御手段121に動作パターンコマンドを送信するように構成してもよい。また、可動演出を行うか否かを例えば演出制御手段121側の抽選により決定するように構成してもよい。
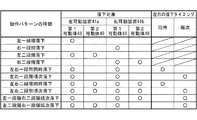
本実施形態における動作パターンは、図16に示す10種類に大別できる。左一段階落下パターン及び右一段階落下パターンは、それぞれ左右一方側の第1可動体48のみを落下させるパターンで、左二段階落下パターン及び右二段階落下パターンは、それぞれ左右一方側の第1,第2可動体48,49のみを段階的に落下させるパターンである。
左右一段階同時落下パターン及び左右一段階順次落下パターンは、共に左一段階落下パターンと右一段階落下パターンとを組み合わせたもので、前者の左右一段階同時落下パターンは、左右の第1可動体48のみを同時に落下させるパターン、後者の左右一段階順次落下パターンは、左右の第1可動体48のみを時間をずらして順次落下させるパターンである。
左右二段階同時落下パターン及び左右二段階順次落下パターンは、共に左二段階落下パターンと右二段階落下パターンとを組み合わせたもので、前者の左右二段階同時落下パターンは、左右の第1,第2可動体48,49を左右同時に落下させるパターン、後者の左右二段階順次落下パターンは、左右の第1,第2可動体48,49を時間をずらして順次落下させるパターン(一部同時落下も含む)である。
左一段階右二段階順次落下パターンは、左一段階落下パターンと右二段階落下パターンとを組み合わせたもので、左の第1可動体48と右の第1,第2可動体48,49とを時間をずらして順次落下させるパターン(一部同時落下も含む)である。また、左二段階右一段階順次落下パターンは、左二段階落下パターンと右一段階落下パターンとを組み合わせたもので、左の第1,第2可動体48,49と右の第1可動体48とを時間をずらして順次落下させるパターン(一部同時落下も含む)である。
これら各種類毎に、落下タイミング等を異ならせた複数の動作パターンを設けることが可能である。もちろん、これら全種類の動作パターンを全て用いる必要はない。
駆動制御手段125は、動作パターン選択手段124で選択された動作パターンに従って左右の第1,第2可動体48,49を動作させるべく駆動手段54を制御するもので、例えば動作パターン選択手段124によって動作パターンが選択された場合に、例えば演出図柄表示制御手段123による演出図柄37a〜37cの変動制御と同期して図17に示す左可動体制御処理及び/又は右可動体制御処理を実行するように構成されている。本実施形態では、左右一方側の可動体のみを落下させる動作パターン(例えば左一段階落下パターン)の場合には左可動体制御処理と右可動体制御処理との一方のみを実行し、左右両方の可動体を落下させる動作パターン(例えば左右二段階順次落下パターン)の場合には左可動体制御処理と右可動体制御処理とを並行して実行するものとする。
左可動体制御処理と右可動体制御処理とは、制御対象が左可動装置41a側の駆動手段54であるか右可動装置41b側の駆動手段54であるか否かの違いだけで制御手順は共通である。以下、図17に示す右可動体制御処理について、図12〜図14の動作説明図、及び図18,図19に示すタイミングチャートを適宜参照しつつ説明する。なお、図18は第1可動体48のみを落下させる右一段階落下パターン等の場合のタイミングチャートの一例、図19は第1,第2可動体48,49を共に落下させる右二段階落下パターン等の場合のタイミングチャートの一例である。
右可動体制御処理(図17)では、まず待機状態確認処理(S1)が実行される。この待機状態確認処理は、右可動装置41bが所定の待機状態にあることを確認し、待機状態にないと判断された場合には待機状態に移行させるための処理である。ここで、待機状態とは、例えば移動体53が押し下げ待機位置に存在すると共に、第1可動体48が第1位置に、第2可動体49が第2位置にそれぞれ存在する状態(図14(F)に実線で示す)である。
移動体53が押し下げ待機位置に存在するか否かは、例えば下部位置検出手段57のON/OFF状態に基づいて判断することが可能である。本実施形態の場合、移動体53が押し下げ待機位置に存在する場合だけでなく、第1押し下げ位置、第2押し下げ位置に存在する場合についても下部位置検出手段57はONになるため、下部位置検出手段57がONであることのみでは移動体53が押し下げ待機位置に存在することは保証されない。従って、例えば下部位置検出手段57がONである場合にはその下部位置検出手段57がOFFになるまで移動体53を上昇させた後、下部位置検出手段57が再びONになるまで移動体53を下降させればよい。もちろん、下部位置検出手段57がOFFの場合には、そのまま下部位置検出手段57がONになるまで移動体53を下降させればよい。
また、第1可動体48が第1位置に、第2可動体49が第2位置にそれぞれ存在するか否かは、例えば上部位置検出手段56のON/OFF状態に基づいて判断すればよい。なお本実施形態では、上部位置検出手段56は第2可動体49が第2位置にある場合にONになるため、上部位置検出手段56がONであっても、厳密には第1可動体48が第1位置にあることは保証されない。第1可動体48が第1位置に、第2可動体49が第2位置にそれぞれ存在するか否かを厳密に判断するためには、例えば第1可動体48が第1位置にある場合にONになる検出手段を新たに設けてもよいし、上部位置検出手段56を、第1可動体48が第1位置にある場合にONになるように変更してもよい。本実施形態の場合、第1可動体48が第1位置に存在すれば、第2可動体49は第2位置に存在すると判断できる。
待機状態確認処理(S1)において、所定の待機状態にあることが検出されない場合には例えば所定のエラー処理が実行される。但し、この場合のエラーは可動装置41a,41bに関するものであり、遊技進行に直接的な影響を及ぼすものではないため、例えば遊技を停止させることなくエラー報知を行えばよい。
待機状態確認処理(S1)に続いては、動作パターン選択手段124によって選択された動作パターンに従って、まず第1可動体48の落下タイミングが到来したか否かが監視される(S2)。そして、第1可動体48の落下タイミングが到来すると(S2:Yes)、移動体53を第1押し上げ位置まで下降させるべく、駆動手段54に対して下降駆動方向への所定ステップのパルス信号が出力される(S3)。
これにより、図12(A)に示すように、移動体53が下降する際にその押し下げ部88がロック解除リンク52の被押し下げ部113を押し下げ、ロック解除リンク52は非解除位置から第1解除位置まで移動する(図18のt1→t2、図19のT1→T2)。その際、第1ロックレバー50がロック姿勢からロック解除姿勢に移行して第1可動体48のロックが解除されるため、図12(B)に示すように第1可動体48は第1位置から所定の第1落下位置まで自由落下する(図18のt2、図19のT2)。本実施形態では、この第1落下位置は、第1解除位置に存在する移動体53上である。なお、第1可動体48の下降を所定の第1落下位置で阻止する第1落下受け部を設け、第1可動体48の落下の衝撃を移動体53ではなくこの第1落下受け部で受けるようにしてもよい。
そして、第1可動体48だけでなく第2可動体49も落下させる動作パターン(右二段階落下パターン等、図19参照)の場合には(S4:Yes)、続いて第2可動体49の落下タイミングが到来したか否かが監視される(S5)。そして、第2可動体49の落下タイミングが到来すると(S5:Yes)、移動体53を第2押し下げ位置まで下降させるべく、駆動手段54に対して下降駆動方向への所定ステップのパルス信号が出力される(S6)。
これにより、図13(C)に示すようにロック解除リンク52が移動体53によって更に押し下げられて第1解除位置から第2解除位置まで移動し(図19のT3→T4)、第2ロックレバー51がロック姿勢からロック解除姿勢に移行して第2可動体49のロックが解除されるため、図13(D)に示すように第2可動体49は第2位置から所定の第2落下位置まで自由落下する。本実施形態では、この第2落下位置は、第2解除位置の移動体53上に存在する第1可動体48上の位置である。なお、第2可動体49の下降を所定の落下位置で阻止する第2落下受け部を設け、第2可動体49の落下の衝撃を移動体53等ではなくこの第2落下受け部で受けるようにしてもよい。
なお、第1可動体48のみを落下させる動作パターン(右一段階落下パターン等、図18参照))の場合には(S4:No)、S5,S6の処理は実行されない。
第1,第2可動体48,49の落下処理(S2〜S6)が終了すると、第1,第2可動体48,49の第1,第2位置への復帰タイミングが到来したか否かが監視される(S7)。そして、第1,第2可動体48,49の復帰タイミングが到来すると(S7:Yes)、移動体53を押し上げ完了位置まで上昇させるべく、駆動手段54に対して上昇駆動方向への所定ステップのパルス信号が出力される(S8)。
移動体53が上昇を始めると、その移動体53に押されて第1,第2可動体48,49も上昇を始める(図18のt3、図19のT5)。また、移動体53に押し下げられていたロック解除リンク52は、バネ118の付勢力によって移動体53と共に上昇を始め、移動体53が押し下げ待機位置を通過するときに非解除位置に達し(図18のt4、図19のT6)、それに伴って第1,第2ロックレバー50,51はそれぞれバネ107の付勢力によってロック姿勢に移行する。なお、移動体53が押し下げ待機位置を通過すると(図18のt4、図19のT6)、下部位置検出手段57はONからOFFに切り替わる。
その後、第1,第2可動体48,49の被係合部73,74がそれぞれ第1,第2ロックレバー50,51を押し退けつつ上昇し、図14(E)に示すように移動体53が押し上げ完了位置に到達したとき(図18のt5、図19のT7)、第1,第2ロックレバー50,51が第1,第2可動体48,49上の被係合部73,74の下側に係合して、第1,第2可動体48,49はそれぞれ第1,第2位置でロックされる。なお、第1,第2可動体48,49が第1,第2位置に到達すると、上部位置検出手段56がOFFからONに切り替わる。
移動体53による第1,第2可動体48,49の押し上げ処理(S8)の終了によって可動演出は終了する。可動演出が終了すると、次の可動演出が開始されるまでの所定のタイミングで、移動体53を押し下げ待機位置まで下降させるべく、駆動手段54に対して下降駆動方向への所定ステップのパルス信号が出力される(S9)。図14(F)に示すように移動体53が押し下げ待機位置に到達すると(図18のt6、図19のT8)、下部位置検出手段57がOFFからONに切り替わる。
以上説明したように、本実施形態のパチンコ機は、昇降移動可能に設けられた第1,第2可動体48,49と、第1可動体48を第1位置で解除可能にロックする第1ロックレバー(第1ロック手段)50と、第2可動体49を第2位置で解除可能にロックする第2ロックレバー(第2ロック手段)51と、第1ロックレバー50及び第2ロックレバー51によるロックを解除可能なロック解除リンク(ロック解除手段)52とを備え、そのロック解除リンク52は、第1,第2ロックレバー50,51の何れのロックも解除しない非解除位置と、第1ロックレバー50によるロックを解除して第1可動体48を第1位置から自由落下させる第1解除位置と、第2ロックレバー51によるロックを解除して第2可動体49を第2位置から自由落下させる第2解除位置とに移動可能であり、第1解除位置と第2解除位置とを異ならせているため、第1可動体48と第2可動体49とを異なるタイミングで落下させることができ、インパクトの大きい自由落下式の可動体を採用しつつ、変化に富んだ演出が可能となる。
図20〜図26は本発明の第2の実施形態を例示し、第1の実施形態を一部変更することにより、第1の実施形態のように複数の可動体48,49の落下タイミングを異ならせるのではなく、一つの可動体131を二段階で落下させるように構成した例を示している。なお以下の説明では、第1の実施形態との相違点を中心に説明し、特に言及しない点については第1の実施形態と共通であるとする。
本実施形態では、図20,図21に示すように、左右の可動装置41a,41bにそれぞれ一つの可動体131を設けている。この可動体131は、第1の実施形態における第2可動体49と同一構成であるとする。またこれにより、移動体53の押し上げ完了位置が第1の実施形態とは異なっており、図21に示すように、第1の実施形態における第1可動体48の第1位置が、本実施形態における移動体53の押し上げ完了位置となっている。なお、本実施形態の可動体131の各構成部分には第1の実施形態の第2可動体49と同一の符号を用いている。
また、図21〜図24に示すように、本実施形態のロック解除リンク52′は、第1の実施形態のロック解除リンク52と同様、第1,第2ロックレバー50,51にそれぞれ対応する第1,第2ロック解除部111′,112′が上リンク部114aに、移動体53の押し下げ部88に対応する被押し下げ部113が下リンク部114bにそれぞれ設けられると共に、バネ118によってケース体47に対して上向きに弾性付勢されており、移動体53が第1の実施形態と同じ「押し下げ待機位置」を超えて下降する際に、その移動体53の押し下げ部88がバネ118の付勢力に抗して被押し下げ部113を押し下げることによって下降可能となっている。
ロック解除リンク52′の可動範囲内には、第1の実施形態におけるロック解除リンク52と同様、第1,第2ロックレバー50,51の何れのロックも解除しない「非解除位置」(図22(a)に二点鎖線で、図24(e),(f)に実線でそれぞれ示す)と、第1ロックレバー50によるロックを解除する「第1解除位置」(図23(c),(d)に実線で示す)と、第2ロックレバー51によるロックを解除する「第2解除位置」(図22(a),(b)に実線で示す)とが含まれているが、第1の実施形態とは異なり、「非解除位置」の下側に「第2解除位置」が設定され、「第1解除位置」はその「第2解除位置」の更に下側に設定されている。
即ち、ロック解除リンク52′は、移動体53によって押し下げられていない状態では、バネ118の付勢によって非解除位置に保持され(図24(f))、移動体53の押し下げによってロック解除リンク52が非解除位置から下降する際に、まず第2ロック解除部112が第2ロックレバー51の操作レバー部105に上側から当接してこれを押し下げ、ロック解除リンク52′がこの第2解除位置に達したときに第2ロックレバー51がロック解除姿勢となって(図22(a))、可動体131が第2位置から自由落下する(図22(b))。
このとき、第1ロック解除部111は未だ第1ロックレバー50と干渉せず、第1ロックレバー50はロック姿勢のままであるため、第2位置から落下してきた可動体131はこの第1ロックレバー50によってその落下が阻止され、第1位置で停止する(図22(b))。
そして、移動体53の押し下げによってロック解除リンク52′が第2解除位置を超えて更に下降する際に、第1ロック解除部111が第1ロックレバー50の操作レバー部105に上側から当接してこれを押し下げ、ロック解除リンク52′がこの第1解除位置に達したときに第1ロックレバー50がロック解除姿勢となって(図23(c))、第1位置で停止していた可動体131が第1位置から移動体53上に自由落下する(図23(d))。
なお、移動体53は「押し上げ完了位置」まで上昇することにより、自由落下した可動体131を第2位置まで押し上げる(図24(e))ように制御される。従って、移動体53の「押し上げ完了位置」は、可動体131の第2位置の下側に隣接する位置に設定されている。
以上のように、ロック解除リンク52′は、移動体53の押し下げにより、非解除位置から第2解除位置を経て第1解除位置に至るようになっている。このように「第1解除位置」と「第2解除位置」とが異なる位置に設定されていることで、移動体53の移動により、可動体131を二段階で自由落下させることが可能である。
なお、第1の実施形態と同様、移動体53の「第1押し下げ位置」、「第2押し下げ位置」がそれぞれロック解除リンク52′の「第1解除位置」、「第2解除位置」に対応しており、また、押し下げ部88が被押し下げ部113に略当接するときの移動体53の位置が「押し下げ待機位置」に設定されているものとする。
本実施形態における可動体131の動作パターンは、図25に示す10種類に大別できる。図25に示す動作パターンの種類は、その名称については第1の実施形態(図16)と共通であるが、その内容が異なっている。即ち、本実施形態の左一段階落下パターン及び右一段階落下パターンは、それぞれ左右一方側の可動体131を一段階だけ落下させるパターンで、左二段階落下パターン及び右二段階落下パターンは、それぞれ左右一方側の可動体131を二段階落下させるパターンである。
左右一段階同時落下パターン及び左右一段階順次落下パターンは、共に左一段階落下パターンと右一段階落下パターンとを組み合わせたもので、前者の左右一段階同時落下パターンは、左右の可動体131を同時に一段階だけ落下させるパターン、後者の左右一段階順次落下パターンは、左右の可動体131をそれぞれ一段階だけ時間をずらして順次落下させるパターンである。
左右二段階同時落下パターン及び左右二段階順次落下パターンは、共に左二段階落下パターンと右二段階落下パターンとを組み合わせたもので、前者の左右二段階同時落下パターンは、左右の可動体131を同時に二段階落下させるパターン、後者の左右二段階順次落下パターンは、左右の可動体131を時間をずらしてそれぞれ二段階順次落下させるパターン(一部同時落下も含む)である。
左一段階右二段階順次落下パターンは、左一段階落下パターンと右二段階落下パターンとを組み合わせたもので、左の可動体131を一段階、右の可動体131を二段階、時間をずらして順次落下させるパターン(一部同時落下も含む)である。また、左二段階右一段階順次落下パターンは、左二段階落下パターンと右一段階落下パターンとを組み合わせたもので、左の可動体131を二段階、右の可動体131を一段階、時間をずらして順次落下させるパターン(一部同時落下も含む)である。
これら各種類毎に、落下タイミング等を異ならせた複数の動作パターンを設けることが可能である。もちろん、これら全種類の動作パターンを全て用いる必要はない。
以下、図26に示す右可動体制御処理について、図22〜図24の動作説明図、及び図27,図28に示すタイミングチャートを適宜参照しつつ説明する。なお、図27は可動体131を一段階だけ落下させる右一段階落下パターン等の場合のタイミングチャートの一例、図28は可動体131を二段階落下させる右二段階落下パターン等の場合のタイミングチャートの一例である。
右可動体制御処理(図26)では、まず待機状態確認処理(S1′)が実行される。この待機状態確認処理は、右可動装置41bが所定の待機状態にあることを確認し、待機状態にないと判断された場合には待機状態に移行させるための処理である。本実施形態における待機状態とは、例えば移動体53が押し下げ待機位置に存在すると共に、可動体131が第2位置に存在する状態(図24(f)に実線で示す)である。
移動体53が押し下げ待機位置に存在するか否かは、第1の実施形態と同様、下部位置検出手段57のON/OFF状態に基づいて判断することが可能である。また、可動体131が第2位置に存在するか否かは、上部位置検出手段56のON/OFF状態に基づいて判断すればよい。待機状態確認処理(S1′)において、所定の待機状態にあることが検出されない場合には例えば所定のエラー処理が実行される。
待機状態確認処理(S1′)に続いては、動作パターン選択手段124によって選択された動作パターンに従って、まず可動体131の第1落下タイミングが到来したか否かが監視される(S2′)。そして、可動体131の第1落下タイミングが到来すると(S2′:Yes)、移動体53を第2押し上げ位置まで下降させるべく、駆動手段54に対して下降駆動方向への所定ステップのパルス信号が出力される(S3′)。
これにより、図22(a)に示すように、移動体53が下降する際にその押し下げ部88がロック解除リンク52′の被押し下げ部113を押し下げ、ロック解除リンク52′は非解除位置から第2解除位置まで移動する(図27のt1′→t2′、図28のT1′→T2′)。その際、第2ロックレバー51がロック姿勢からロック解除姿勢に移行して可動体131のロックが解除される一方、第1ロックレバー50はロック姿勢のまま維持される。これにより、図22(b)に示すように可動体131は第2位置から自由落下し、被係合部74が第1ロックレバー50に係合することにより第1位置で停止する(図27のt2′、図28のT2′)。
そして、可動体131を二段階で落下させる動作パターン(右二段階落下パターン等、図28参照)の場合には(S4′:Yes)、続いて可動体131の第2落下タイミングが到来したか否かが監視される(S5′)。そして、可動体131の第2落下タイミングが到来すると(S5′:Yes)、移動体53を第1押し下げ位置まで下降させるべく、駆動手段54に対して下降駆動方向への所定ステップのパルス信号が出力される(S6′)。
これにより、図23(c)に示すようにロック解除リンク52′が移動体53によって更に押し下げられて第2解除位置から第1解除位置まで移動し(図28のT3′→T4′)、第1ロックレバー50がロック姿勢からロック解除姿勢に移行して第2位置にある可動体131のロックが解除されるため、図23(d)に示すように可動体131は第2位置から所定の落下位置まで自由落下する。本実施形態では、この落下位置は、第1解除位置に存在する移動体53上の位置である。なお、可動体131の下降を所定の落下位置で阻止する落下受け部を設け、可動体131の落下の衝撃を移動体53ではなくこの落下受け部で受けるようにしてもよい。
なお、可動体131を一段階だけ落下させる動作パターン(右一段階落下パターン等、図27参照))の場合には(S4′:No)、S5′,S6′の処理は実行されない。
可動体131の落下処理(S2′〜S6′)が終了すると、可動体131の第2位置への復帰タイミングが到来したか否かが監視される(S7′)。そして、可動体131の復帰タイミングが到来すると(S7′:Yes)、移動体53を押し上げ完了位置まで上昇させるべく、駆動手段54に対して上昇駆動方向への所定ステップのパルス信号が出力される(S8′)。
移動体53が上昇を始めると(図27のt3′、図28のT5′)、二段階落下パターン(図28)の場合にはそれと同時に、一段階落下パターン(図27)の場合には移動体53の上昇途中からその移動体53に押されて可動体131も上昇を始める。また、移動体53に押し下げられていたロック解除リンク52′は、バネ118の付勢力によって移動体53と共に上昇を始め、移動体53が押し下げ待機位置を通過するときに非解除位置に達し(図27のt4′、図28のT6′)、それに伴って第1,第2ロックレバー50,51はそれぞれバネ107の付勢力によってロック姿勢に移行する。なお、移動体53が押し下げ待機位置を通過すると(図27のt4′、図28のT6′)、下部位置検出手段57はONからOFFに切り替わる。
その後、可動体131の被係合部74が、二段階落下パターン(図28)の場合には第1,第2ロックレバー50,51を順次、一段階落下パターン(図27)の場合には第2ロックレバー51のみを押し退けつつ上昇し、図24(e)に示すように移動体53が押し上げ完了位置に到達したとき(図27のt5′、図28のT7′)、第2ロックレバー51が可動体131上の被係合部74の下側に係合して、可動体131は第2位置でロックされる。なお、可動体131が第2位置に到達すると、上部位置検出手段56がOFFからONに切り替わる。
移動体53による可動体131の押し上げ処理(S8′)の終了によって可動演出は終了する。可動演出が終了すると、次の可動演出が開始されるまでの所定のタイミングで、移動体53を押し下げ待機位置まで下降させるべく、駆動手段54に対して下降駆動方向への所定ステップのパルス信号が出力される(S9′)。図24(f)に示すように移動体53が押し下げ待機位置に到達すると(図27のt6′、図28のT8′)、下部位置検出手段57がOFFからONに切り替わる。
以上説明したように、本実施形態のパチンコ機は、昇降移動可能な可動体131と、可動体131を第1位置で解除可能にロックする第1ロックレバー(第1ロック手段)50と、可動体131を第2位置で解除可能にロックする第2ロックレバー(第2ロック手段)51と、第1ロックレバー50及び第2ロックレバー51によるロックを解除可能なロック解除リンク(ロック解除手段)52′とを備え、そのロック解除リンク52′は、第1,第2ロックレバー50,51の何れのロックも解除しない非解除位置と、第1ロックレバー50によるロックを解除して可動体131を第1位置から自由落下させる第1解除位置と、第2ロックレバー51によるロックを解除して可動体131を第2位置から自由落下させる第2解除位置とに移動可能であり、そのロック解除リンク52′を、非解除位置から第2解除位置を経て第1解除位置に至るように構成し、ロック解除リンク52′が第2解除位置で第2ロックレバー51によるロックを解除することにより可動体131が第2位置から第1位置まで自由落下し、ロック解除リンク52′が第1解除位置で第1ロックレバー50によるロックを解除することにより可動体131が第1位置から更に自由落下するように構成しているため、一つの可動体131を二段階で落下させることができ、インパクトの大きい自由落下式の可動体を採用しつつ、変化に富んだ演出が可能となる。
図29は本発明の第3の実施形態を例示し、第1の実施形態を一部変更して、一対の可動装置41a,41bにおけるそれぞれの可動体に跨がるように可動演出体132を設けた例を示している。
本実施形態では、左可動装置41aの第1可動体48と右可動装置41bの第1可動体48とに跨がるように、例えば細長状の可動演出体132を設けている。可動演出体132は、その右端側が、右可動装置41b側の第1可動体48における演出体支持部71により、前後方向の軸133廻りに回転可能な状態で支持され、また左端側が、左可動装置41a側の第1可動体48における演出体支持部71により、前後方向の軸134廻りに回転可能で且つ可動演出体132の長手方向に設けられた長孔135に沿ってスライド可能な状態で支持されている。なお、それ以外の構成は第1の実施形態と同様であるとする。
これにより、例えば左右一段階順次落下パターン、左右二段階順次落下パターン等の動作パターンに従って、左右の第1可動体48を異なるタイミングで順次落下させる場合、例えば先に一方の第1可動体48を落下させた段階では可動演出体132を例えば表示画面22aの前側で斜めに傾いた状態となる。もちろん、左右の第1可動体48を同時に落下させる場合には、可動演出体132は略水平を保ったまま落下する。
このように、一対の可動装置41a,41bにおけるそれぞれの可動体48に跨がるように可動演出体132を設けることで、各可動体48を同時に落下させる場合と時間をずらして落下させる場合とで可動演出体132の動作に変化を持たせることが可能となる。
以上、本発明の実施形態について詳述したが、本発明はこれらの実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々の変更が可能である。例えば、第1の実施形態では一方の可動装置に2つの可動体を設け、それらを異なるタイミングで順次落下させることが可能に構成したが、3つ以上の可動体を設けてもよい。また、第2の実施形態では、1つの可動体を二段階で落下させることが可能に構成したが、三段階以上で落下させることが可能に構成してもよい。また、第1の実施形態と第2の実施形態とを組み合わせることにより、複数の可動体をそれぞれ複数段階で落下させることが可能に構成してもよい。
第1の実施形態のように一つの可動装置に複数の可動体を設ける場合、それらの可動体を異なる昇降路上に配置してもよい。また、可動体と移動体とを異なる昇降路上に配置してもよい。
可動体を押し上げるための可動体押し上げ用移動体と、ロック解除手段を移動させるためのロック解除用移動体とを別個に設けてもよい。この場合、複数の可動体のうちの最も下側の可動体を駆動手段の駆動により上昇可能とすることにより、その可動体を可動体押し上げ用移動体としてもよい。
実施形態では左右一対の可動装置を設けた例を示したが、可動装置は一つであってもよいし三つ以上設けてもよい。可動装置を複数設ける場合、それらに搭載する可動体の数はそれぞれ異なっていてもよい。
また本発明は、パチンコ機に限らず、アレンジボール機、雀球遊技機等の他の弾球遊技機はもちろん、スロットマシン等の各種遊技機において同様に実施することが可能である。