JP6088141B2 - 適応型のモード・ビデオ符号化および復号を行うための方法および装置 - Google Patents
適応型のモード・ビデオ符号化および復号を行うための方法および装置 Download PDFInfo
- Publication number
- JP6088141B2 JP6088141B2 JP2011549131A JP2011549131A JP6088141B2 JP 6088141 B2 JP6088141 B2 JP 6088141B2 JP 2011549131 A JP2011549131 A JP 2011549131A JP 2011549131 A JP2011549131 A JP 2011549131A JP 6088141 B2 JP6088141 B2 JP 6088141B2
- Authority
- JP
- Japan
- Prior art keywords
- mode
- picture
- pictures
- mapping information
- mapping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/30—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using hierarchical techniques, e.g. scalability
- H04N19/34—Scalability techniques involving progressive bit-plane based encoding of the enhancement layer, e.g. fine granular scalability [FGS]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/11—Selection of coding mode or of prediction mode among a plurality of spatial predictive coding modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/30—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using hierarchical techniques, e.g. scalability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
Description
本出願は、2009年2月5日付で出願された米国仮特許出願第61/150,115号の利益を主張するものであり、これらの開示内容全体を本明細書に盛り込んだものとする。
入力ビデオ・コンテンツの非定常的な特性を利用するために、ビデオ符号化器は、エントロピー符号化により入力ビデオ信号を可変長符号化されたシンタックス要素のビットストリームにマッピングする。高い頻度で発生するシンボルは、短い符号語を用いて表現され、より低い頻度のシンボルは、長い符号語を用いて表現される。
(1)2値化
(2)コンテキスト・モデリング
(3)2値算術符号化
図5を参照すると、ビデオ符号化器における適応型のモード・符号化を導出するための例示的な方法が概ね参照符号500によって示されている。方法は、制御を機能ブロック520に受け渡す開始ブロック510を含む。機能ブロック520は、符号化セットアップ(オプションとして、オペレータのアシスタンスを伴う場合がある)を実行し、制御をループ端ブロック530に受け渡す。ループ端ブロック530は、ピクチャjのループを実行し、制御を機能ブロック540に受け渡す。ここで、j=1,・・・,#である(シンボル「♯」は、単語「数(number)」を表す)。機能ブロック540は、ピクチャjを符号化し、制御を機能ブロック550に受け渡す。機能ブロック550は、1回の反復処理(最初の反復処理である必要はない)の間に、前に符号化したビデオ・コンテンツからのモード・マッピングを導出し、その後、1回以上の後続する反復処理の間に、1回以上モード・マッピングを更新し、オプションとして、1つ以上の条件(例えば、シーンの変化など)に基づいてモード・マッピングのリセット処理を実行し、制御をループ端ブロック560に受け渡す。ループ端ブロック560は、ループを終了し、制御を終了ブロック599に受け渡す。
別の実施の形態においては、マッピング情報がシンタックス内に具体的に示され、ビットストリームで伝送される。この方法においては、適応型のモード・マッピングは、符号化処理の前または間に導出することができる。例えば、相異なる空間解像度で符号化されたものからのトレーニング・データに従って、モード・マッピング・テーブルを空間解像度の範囲で作成することができる。次に、マッピングは、シーケンス・レベル、ピクチャ・レベル、スライス・レベルなどで符号化される。
別の実施の形態においては、マッピング情報がシンタックス内でも示されており、ビットストリームで伝送される。実施の形態2の場合とは異なり、前に符号化されたピクチャまたは今回符号化されたピクチャに基づいて、マッピング・テーブルを符号化/復号処理の間に作成することができる。例えば、ピクチャを符号化する前に、モード・マッピング・テーブルが作成され、シンタックス内で示される。符号化処理の間にモード・マッピング・テーブルを更新し続けることができる。モード・マッピング・テーブルは、前に符号化されたピクチャ情報に基づいて作成されるか、さらに/または、何らかのモード・マッピング・テーブルのセットおよび/または今回符号化されたピクチャの異なる/部分的な符号化パスから選択される。さらに、マッピング・テーブルは、例えば、限定するものではないが、平均や分散など、符号化されたピクチャまたはシーケンスの統計に基づいて作成することができる。
モードとモード・インデックスとの間の適応型のマッピングは、ハイレベル・シンタックスにおいて規定することができる。一実施の形態では、本願の原理に従って使用するINTRAフレームのためのシンタックスをどのように定義するかについて、例を示す。MPEG−4 AVC規格において、決まったマッピングが、符号化器側と復号器側でのデフォルトのマッピングとして使用される。我々の提案する方法は、シーケンス・パラメータ・セット、または、ピクチャ・パラメータ・セットを介して他のマッピングを使用するフレキシビリティを提供する。シーケンス・パラメータ・セットおよびピクチャ・パラメータ・セットにおけるシンタックスの例が表1および表2にそれぞれ示されている。本願の原理の精神を逸脱することなく、様々なレベルで各インター・フレームおよび他のシンタックス要素に対して同様のシンタックスの変更を適用することができる。

seq_mb_type_adaptation_present_flag equal to 1(seq_mb_type_adaptation_present_flagが1である)は、シーケンス・パラメータ・セット内に適応型のモード・マッピングが存在することを規定する。seq_mb_type_adaptation_present_flag equal to 0(seq_mb_type_adaptation_present_flagが0である)は、シーケンス・パラメータ・セット内に適応型のモード・マッピングが存在しないことを規定する。デフォルトのマッピングが使用される。
pic_mb_type_adaptation_present_flag equal to 1(pic_mb_type_adaptation_present_flagが1である)は、ピクチャ・パラメータ・セット内に適応型のモード・マッピングが存在することを規定する。pic_mb_type_adaptation_present_flag equal to 0(pic_mb_type_adaptation_present_flagが0である)は、ピクチャ・パラメータ・セット内に適応型のモード・マッピングが存在しないことを規定する。デフォルトのマッピングが使用される。
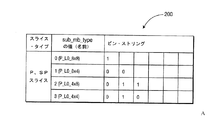
この変形例では、INTRAモード・マッピングにどのように適応するかについての別の具体例を提供する。2つのINTRAモード、INTRA4×4およびINTRA8×8が存在することを想定する。さらに、これらの2つのINTRAモードが指数ゴロム(Exp‐Golomb)符号語を用いて符号化されることを想定する。この具定例のために、INTRAモードをSIPタイプ(sip_type)と呼ぶ。
この具体例のためのシンタックスの変更が表3に示されている。低解像度のビデオのためのマッピングが符号化器および復号器の側でデフォルト・マッピングとして使用される。アプリケーションの中には、他の解像度のためにこのマッピングをデフォルトのマッピングとして使用できるものもある。我々の提案する方法は、シーケンス・パラメータ・セットまたはピクチャ・パラメータ・セットを通じて他のマッピングを使用するフレキシビリティを提供する。表3は、ピクチャ・パラメータ・セットにおけるシンタックスの変更を示す。限定するものではないが、シーケンス・パラメータ・セットを含む他のシンタックスのレベルに同様のシンタックスの変更を適用することができる。
sip_type_flag equal to 1(sip_type_flagが1である)は、ピクチャ・パラメータ・セット内に適応型のモード・マッピングが存在することを規定する。sip_type_flag equal to 0(sip_type_flagが0である)は、ピクチャ・パラメータ・セット内に適応型のモード・マッピングが存在しないことを規定する。デフォルトのマッピングが使用される。
(付記)
(付記1)
モード・マッピング情報を符号化してピクチャのシーケンス内のピクチャの少なくとも一部を符号化するために利用可能なモード・インデックスとモードの各値の間のマッピングを行う符号化器(300)を含み、
前記モード・マッピング情報は、前記シーケンスの1つ以上の実際のパラメータに応じて適応化される、前記装置。
(付記2)
前記ピクチャは、今回符号化されたピクチャであり、前記実際のパラメータは、前記シーケンスにおける1つ以上の前に符号化されたピクチャのための符号化情報を含む、付記1に記載の装置。
(付記3)
前記符号化情報は、モードの使用頻度、少なくとも1つの空間解像度、および少なくと
も1つの時間解像度のうちの少なくとも1つを含む、付記2に記載の装置。
(付記4)
前記シーケンスの少なくとも一部は、結果として生ずるビットストリームに符号化され、前記適応化されたモード・マッピング情報は、前記結果として生ずるビットストリームにおいて信号送信される、付記1に記載の装置。
(付記5)
前記適応化されたモード・マッピング情報は、少なくとも1つのハイレベル・シンタックス要素を使用して信号送信される、付記1に記載の装置。
(付記6)
スライス・ヘッダ、シーケンス・パラメータ・セット、ピクチャ・パラメータ・セット、ネットワーク抽象化層ユニット・ヘッダ、および補助拡張情報メッセージのうちの少なくとも1つに前記ハイレベル・シンタックス要素が含まれている、付記1に記載の装置。
(付記7)
前記シーケンスの1つ以上のピクチャの符号化の後に前記適応化されたモード・マッピング情報が更新される、付記1に記載の装置。
(付記8)
前記シーケンス内の1つ以上の前に符号化されたピクチャのための符号化情報、前記シーケンスの少なくとも一部に関連する適応化されたモード・マッピング情報のセットのうちの選択されたサブセット、前記ピクチャのための1つ以上の部分的な符号化パス、前記シーケンス内の1つ以上のピクチャの統計、前記シーケンス内の前記1つ以上のピクチャの1つ以上の部分の統計、および前記シーケンスの統計のうちの少なくとも1つから前記実際のパラメータが決定される、付記1に記載の装置。
(付記9)
モード・マッピング情報を符号化してピクチャのシーケンス内のピクチャの少なくとも一部を符号化するために利用可能なモード・インデックスとモードの各値の間のマッピングを行うステップ(740、970)を含み、
前記モード・マッピング情報は、前記シーケンスの1つ以上の実際のパラメータに応じて適応化される(740、940、960)、前記方法。
(付記10)
前記ピクチャは、今回符号化されたピクチャであり、前記実際のパラメータは、前記シーケンスにおける1つ以上の前に符号化されたピクチャのための符号化情報を含む(940、960)、付記9に記載の方法。
(付記11)
前記符号化情報は、モードの使用頻度、少なくとも1つの空間解像度、および少なくとも1つの時間解像度のうちの少なくとも1つを含む、付記10に記載の方法。
(付記12)
前記シーケンスの少なくとも一部は、結果として生ずるビットストリームに符号化され、前記適応化されたモード・マッピング情報は、前記結果として生ずるビットストリームにおいて信号送信される(740、975)、付記9に記載の方法。
(付記13)
前記適応化されたモード・マッピング情報は、少なくとも1つのハイレベル・シンタックス要素を使用して信号送信される(740、975)、付記9に記載の方法。
(付記14)
スライス・ヘッダ、シーケンス・パラメータ・セット、ピクチャ・パラメータ・セット、ネットワーク抽象化層ユニット・ヘッダ、および補助拡張情報メッセージのうちの少なくとも1つに前記ハイレベル・シンタックス要素が含まれている、付記13に記載の方法。
(付記15)
前記シーケンスの1つ以上のピクチャの符号化の後に前記適応化されたモード・マッピング情報が更新される(550、960)、付記9に記載の方法。
(付記16)
前記シーケンス内の1つ以上の前に符号化されたピクチャのための符号化情報、前記シーケンスの少なくとも一部に関連する適応化されたモード・マッピング情報のセットのうちの選択されたサブセット、前記ピクチャのための1つ以上の部分的な符号化パス、前記シーケンス内の1つ以上のピクチャの統計、前記シーケンス内の前記1つ以上のピクチャの1つ以上の部分の統計、および前記シーケンスの統計のうちの少なくとも1つから前記実際のパラメータが決定される、(940、960)、付記9に記載の方法。
(付記17)
モード・マッピング情報を復号してピクチャのシーケンス内のピクチャの少なくとも一部を復号するために利用可能なモード・インデックスとモードの各値の間のマッピングを行う復号器(400)を含み、
前記モード・マッピング情報は、前記シーケンスの1つ以上の実際のパラメータに応じて適応化される、前記装置。
(付記18)
前記ピクチャは、今回符号化されたピクチャであり、前記実際のパラメータは、前記シーケンスにおける1つ以上の前に符号化されたピクチャのための符号化情報を含む、付記17に記載の装置。
(付記19)
前記符号化情報は、モードの使用頻度、少なくとも1つの空間解像度、および少なくとも1つの時間解像度のうちの少なくとも1つを含む、付記18に記載の装置。
(付記20)
前記シーケンスの少なくとも一部は、結果として生ずるビットストリームから復号され、前記適応化されたモード・マッピング情報は、前記結果として生ずるビットストリームから決定される、付記17に記載の装置。
(付記21)
前記適応化されたモード・マッピング情報は、少なくとも1つのハイレベル・シンタックス要素を使用して信号送信される、付記17に記載の装置。
(付記22)
スライス・ヘッダ、シーケンス・パラメータ・セット、ピクチャ・パラメータ・セット、ネットワーク抽象化層ユニット・ヘッダ、および補助拡張情報メッセージのうちの少なくとも1つに前記ハイレベル・シンタックス要素が含まれている、付記21に記載の装置。
(付記23)
前記シーケンスの1つ以上のピクチャの復号の後に前記適応化されたモード・マッピング情報が更新される、付記17に記載の装置。
(付記24)
前記シーケンス内の1つ以上の前に符号化されたピクチャのための符号化情報、前記シーケンスの少なくとも一部に関連する適応化されたモード・マッピング情報のセットのうちの選択されたサブセット、前記シーケンス内の1つ以上のピクチャの統計、前記シーケンス内の前記1つ以上のピクチャの1つ以上の部分の統計、および前記シーケンスの統計のうちの少なくとも1つから前記実際のパラメータが決定される、付記17に記載の装置。
(付記25)
モード・マッピング情報を復号してピクチャのシーケンス内のピクチャの少なくとも一部を復号するために利用可能なモード・インデックスとモードの各値の間のマッピングを行う復号するステップ(820、1030)を含む方法であって、
前記モード・マッピング情報は、前記シーケンスの1つ以上の実際のパラメータに応じて適応化される、前記方法。
(付記26)
前記ピクチャは、今回符号化されたピクチャであり、前記実際のパラメータは、前記シーケンスにおける1つ以上の前に符号化されたピクチャのための符号化情報を含む、付記25に記載の方法。
(付記27)
前記符号化情報は、モードの使用頻度、少なくとも1つの空間解像度、および少なくとも1つの時間解像度のうちの少なくとも1つを含む、付記26に記載の方法。
(付記28)
前記シーケンスの少なくとも一部は、結果として生ずるビットストリームから復号され、前記適応化されたモード・マッピング情報は、前記結果として生ずるビットストリームから決定される、付記25に記載の方法。
(付記29)
前記適応化されたモード・マッピング情報は、少なくとも1つのハイレベル・シンタックス要素を使用して信号送信される、付記25に記載の方法。
(付記30)
スライス・ヘッダ、シーケンス・パラメータ・セット、ピクチャ・パラメータ・セット、ネットワーク抽象化層ユニット・ヘッダ、および補助拡張情報メッセージのうちの少なくとも1つに前記ハイレベル・シンタックス要素が含まれている、付記29に記載の方法。
(付記31)
前記シーケンスの1つ以上のピクチャの符号化の後に前記適応化されたモード・マッピング情報が更新される、付記25に記載の方法。
(付記32)
前記シーケンス内の1つ以上の前に符号化されたピクチャのための符号化情報、前記シーケンスの少なくとも一部に関連する適応化されたモード・マッピング情報のセットのうちの選択されたサブセット、前記シーケンス内の1つ以上のピクチャの統計、前記シーケンス内の前記1つ以上のピクチャの1つ以上の部分の統計、および前記シーケンスの統計のうちの少なくとも1つから前記実際のパラメータが決定される、付記25に記載の方法。
(付記33)
符号化されたビデオ信号データを記憶するコンピュータによって読み取り可能な記憶媒体であって、
ピクチャのシーケンス内のピクチャの少なくとも一部を符号化するために利用可能なモード・インデックスとモードの各値の間のマッピングを行うためのモード・マッピング情報を含み、
前記モード・マッピング情報は、前記シーケンスの1つ以上の実際のパラメータに応じて適応化される、前記コンピュータによって読み取り可能な記憶媒体。
Claims (16)
- ピクチャのビデオ・シーケンスを符号化し、さらにピクチャの前記ビデオ・シーケンスの前記符号化の間にモード・マッピング情報を取得するように構成された符号化器を含む装置であって、
前記モード・マッピング情報は、ピクチャの前記ビデオ・シーケンスの符号化に利用可能な、少なくとも1つのモード・インデックスと複数の符号化モードのサブタイプとの間のマッピングを提供し、前記マッピングは、より短い符号長を有する前記モード・インデックスがより高い頻度で発生する符号化モードのサブタイプに対して設定されるように行われ、
前記符号化器は、モード・マッピングで前記ビデオ・シーケンスにおける少なくとも1つのピクチャを符号化し、前記少なくとも1つのピクチャを符号化した後に前記ビデオ・シーケンス内の後続のピクチャを符号化することに対して適合したモード・マッピング情報を取得し、
前記適合したモード・マッピング情報は、ピクチャの前記ビデオ・シーケンス内にある、前に符号化された前記少なくとも1つのピクチャからの情報に基づき、前記符号化モードのサブタイプの前記モード・マッピング情報を並べ替えることにより取得される、前記装置。 - 前記適合したモード・マッピング情報は、モードの使用頻度、少なくとも空間解像度、および少なくとも時間解像度のグループから選択された少なくとも1つに基づき取得される、請求項1に記載の装置。
- 前記適合したモード・マッピング情報は、少なくとも1つのハイレベル・シンタックス要素を使用して信号送信される、請求項1に記載の装置。
- スライス・ヘッダ、シーケンス・パラメータ・セット、ピクチャ・パラメータ・セット、ネットワーク抽象化層ユニット・ヘッダ、および補助拡張情報メッセージのうちの少なくとも1つに前記ハイレベル・シンタックス要素が含まれている、請求項3に記載の装置。
- ビデオ・エンコーダーによってピクチャのビデオ・シーケンスを符号化することと、
ピクチャの前記ビデオ・シーケンスを前記符号化する間に、モード・マッピング情報を取得することと、
を含み、
前記モード・マッピング情報は、ピクチャの前記ビデオ・シーケンスの符号化に利用可能な、少なくとも1つのモード・インデックスと複数の符号化モードのサブタイプとの間のマッピングを提供し、前記マッピングは、より短い符号長を有する前記モード・インデックスがより高い頻度で発生する符号化モードのサブタイプに対して設定されるように行われ、
前記ビデオ・シーケンスにおける少なくとも1つのピクチャは、モード・マッピングで符号化され、
適合したモード・マッピング情報は、前記少なくとも1つのピクチャを符号化した後に前記ビデオ・シーケンス内の後続のピクチャを符号化するために取得され、
前記適合したモード・マッピング情報は、ピクチャの前記ビデオ・シーケンス内にある、前に符号化された前記少なくとも1つのピクチャからの情報に基づき、前記符号化モードのサブタイプの前記モード・マッピング情報を並べ替えることにより取得される、方法。 - 前記適合したモード・マッピング情報は、モードの使用頻度、少なくとも空間解像度、および少なくとも時間解像度のグループから選択された少なくとも1つに基づき取得される、請求項5に記載の方法。
- 前記適合したモード・マッピング情報は、少なくとも1つのハイレベル・シンタックス要素を使用して信号送信される、請求項5に記載の方法。
- スライス・ヘッダ、シーケンス・パラメータ・セット、ピクチャ・パラメータ・セット、ネットワーク抽象化層ユニット・ヘッダ、および補助拡張情報メッセージのうちの少なくとも1つに前記ハイレベル・シンタックス要素が含まれている、請求項7に記載の方法。
- ピクチャのビデオ・シーケンスを復号し、さらにピクチャの前記ビデオ・シーケンスの前記復号の間にモード・マッピング情報を取得するように構成された復号器を備え、
前記モード・マッピング情報は、ピクチャの前記ビデオ・シーケンスの復号に利用可能な、少なくとも1つのモード・インデックスと複数の符号化モードのサブタイプとの間のマッピングを提供し、前記マッピングは、より短い符号長を有する前記モード・インデックスがより高い頻度で発生する符号化モードのサブタイプに対して設定されるように行われ、
前記復号器は、モード・マッピングで前記ビデオ・シーケンスにおける少なくとも1つのピクチャを復号し、前記少なくとも1つのピクチャを復号した後に前記ビデオ・シーケンス内の後続のピクチャを復号することに対して適合したモード・マッピング情報を取得し、
前記適合したモード・マッピング情報は、ピクチャの前記ビデオ・シーケンス内にある、前に復号された前記少なくとも1つのピクチャからの情報に基づき、前記符号化モードのサブタイプの前記モード・マッピング情報を並べ替えることにより取得される、装置。 - 前記適合したモード・マッピング情報は、モードの使用頻度、少なくとも空間解像度、および少なくとも時間解像度のグループから選択された少なくとも1つに基づき取得される、請求項9に記載の装置。
- 前記適合したモード・マッピング情報は、少なくとも1つのハイレベル・シンタックス要素を使用して信号送信される、請求項9に記載の装置。
- スライス・ヘッダ、シーケンス・パラメータ・セット、ピクチャ・パラメータ・セット、ネットワーク抽象化層ユニット・ヘッダ、および補助拡張情報メッセージのうちの少なくとも1つに前記ハイレベル・シンタックス要素が含まれている、請求項11に記載の装置。
- ビデオ・デコーダーによってピクチャのビデオ・シーケンスを復号することと、
ピクチャの前記ビデオ・シーケンスを前記復号する間に、モード・マッピング情報を取得することと、
を含み、
前記モード・マッピング情報は、ピクチャの前記ビデオ・シーケンスの復号に利用可能な、少なくとも1つのモード・インデックスと複数の符号化モードのサブタイプとの間のマッピングを提供し、前記マッピングは、より短い符号長を有する前記モード・インデックスがより高い頻度で発生する符号化モードのサブタイプに対して設定されるように行われ、
前記ビデオ・シーケンスにおける少なくとも1つのピクチャは、モード・マッピングで復号され、
前記少なくとも1つのピクチャを復号した後に前記ビデオ・シーケンス内の後続のピクチャを復号することに対して適合したモード・マッピング情報が取得され、
前記適合したモード・マッピング情報は、ピクチャの前記ビデオ・シーケンス内にある、前に復号された前記少なくとも1つのピクチャからの情報に基づき、前記符号化モードのサブタイプの前記モード・マッピング情報を並べ替えることにより取得される、方法。 - 前記適合したモード・マッピング情報は、モードの使用頻度、少なくとも空間解像度、および少なくとも時間解像度のグループから選択された少なくとも1つに基づき取得される、請求項13に記載の方法。
- 前記適合したモード・マッピング情報は、少なくとも1つのハイレベル・シンタックス要素を使用して信号送信される、請求項13に記載の方法。
- スライス・ヘッダ、シーケンス・パラメータ・セット、ピクチャ・パラメータ・セット、ネットワーク抽象化層ユニット・ヘッダ、および補助拡張情報メッセージのうちの少なくとも1つに前記ハイレベル・シンタックス要素が含まれている、請求項15に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15011509P | 2009-02-05 | 2009-02-05 | |
| US61/150,115 | 2009-02-05 | ||
| PCT/US2009/006505 WO2010090629A1 (en) | 2009-02-05 | 2009-12-11 | Methods and apparatus for adaptive mode video encoding and decoding |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015122452A Division JP2015165723A (ja) | 2009-02-05 | 2015-06-17 | 適応型のモード・ビデオ符号化および復号を行うための方法および装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012517186A JP2012517186A (ja) | 2012-07-26 |
| JP2012517186A5 JP2012517186A5 (ja) | 2015-08-06 |
| JP6088141B2 true JP6088141B2 (ja) | 2017-03-01 |
Family
ID=42542312
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011549131A Expired - Fee Related JP6088141B2 (ja) | 2009-02-05 | 2009-12-11 | 適応型のモード・ビデオ符号化および復号を行うための方法および装置 |
| JP2015122452A Pending JP2015165723A (ja) | 2009-02-05 | 2015-06-17 | 適応型のモード・ビデオ符号化および復号を行うための方法および装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015122452A Pending JP2015165723A (ja) | 2009-02-05 | 2015-06-17 | 適応型のモード・ビデオ符号化および復号を行うための方法および装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20110286513A1 (ja) |
| EP (1) | EP2394431A4 (ja) |
| JP (2) | JP6088141B2 (ja) |
| KR (1) | KR101690291B1 (ja) |
| CN (1) | CN102308580B (ja) |
| BR (1) | BRPI0924265A2 (ja) |
| WO (1) | WO2010090629A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104601996B (zh) * | 2009-10-20 | 2018-04-10 | 夏普株式会社 | 运动图像编码装置、运动图像解码装置、运动图像编码方法及运动图像解码方法 |
| SG10201502226SA (en) | 2010-04-09 | 2015-05-28 | Mitsubishi Electric Corp | Moving image encoding device and moving image decoding device |
| US8548062B2 (en) * | 2010-07-16 | 2013-10-01 | Sharp Laboratories Of America, Inc. | System for low resolution power reduction with deblocking flag |
| WO2012140821A1 (ja) | 2011-04-12 | 2012-10-18 | パナソニック株式会社 | 動画像符号化方法、動画像符号化装置、動画像復号化方法、動画像復号化装置、および動画像符号化復号化装置 |
| EP3614665B1 (en) | 2011-05-27 | 2022-03-23 | Sun Patent Trust | Apparatus, method and program for decoding moving pictures |
| US9485518B2 (en) * | 2011-05-27 | 2016-11-01 | Sun Patent Trust | Decoding method and apparatus with candidate motion vectors |
| TW201304552A (zh) | 2011-05-31 | 2013-01-16 | Panasonic Corp | 動態圖像編碼方法、動態圖像編碼裝置、動態圖像解碼方法、動態圖像解碼裝置、及動態圖像編碼解碼裝置 |
| CN106851269B (zh) | 2011-06-30 | 2019-11-15 | 太阳专利托管公司 | 图像解码方法及装置、图像编码方法及装置、编解码装置 |
| US11245912B2 (en) * | 2011-07-12 | 2022-02-08 | Texas Instruments Incorporated | Fast motion estimation for hierarchical coding structures |
| IN2014CN00729A (ja) | 2011-08-03 | 2015-04-03 | Panasonic Corp | |
| CN108881903B (zh) | 2011-10-19 | 2022-01-04 | 太阳专利托管公司 | 图像编码方法及装置、图像解码方法及装置、编解码装置 |
| KR20140103903A (ko) * | 2012-01-17 | 2014-08-27 | 제닙 피티이.엘티디. | 복원 영상 후처리 장치 |
| US9729884B2 (en) | 2012-01-18 | 2017-08-08 | Lg Electronics Inc. | Method and device for entropy coding/decoding |
| TWI514851B (zh) * | 2012-02-15 | 2015-12-21 | Novatek Microelectronics Corp | 影像編碼/解碼系統與其方法 |
| CN104935921B (zh) * | 2014-03-20 | 2018-02-23 | 寰发股份有限公司 | 发送从模式组中选择的一个或多个编码模式的方法和设备 |
| CN108475337B (zh) * | 2016-10-07 | 2022-02-15 | 联发科技股份有限公司 | 视频编解码方法及装置 |
| CN114079774A (zh) * | 2020-08-21 | 2022-02-22 | 北京三星通信技术研究有限公司 | 帧间预测信息的编解码方法及装置 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08205169A (ja) * | 1995-01-20 | 1996-08-09 | Matsushita Electric Ind Co Ltd | 動画像符号化装置及び復号装置 |
| JP4034380B2 (ja) * | 1996-10-31 | 2008-01-16 | 株式会社東芝 | 画像符号化/復号化方法及び装置 |
| CN1131638C (zh) * | 1998-03-19 | 2003-12-17 | 日本胜利株式会社 | 采用一种自适应量化技术的视频信号编码方法及设备 |
| EP2099228B1 (en) * | 2001-09-14 | 2014-11-12 | NTT DoCoMo, Inc. | Coding method, decoding method, coding apparatus, decoding apparatus, image processing system, coding program, and decoding program |
| JP2003324731A (ja) * | 2002-04-26 | 2003-11-14 | Sony Corp | 符号化装置、復号装置、画像処理装置、それらの方法およびプログラム |
| EP2202989B1 (en) * | 2002-04-26 | 2014-04-16 | NTT DoCoMo, Inc. | Image encoding apparatus, image decoding apparatus, image encoding method, image decoding method, image encoding program, and image decoding program |
| US20030231795A1 (en) * | 2002-06-12 | 2003-12-18 | Nokia Corporation | Spatial prediction based intra-coding |
| JP3940657B2 (ja) * | 2002-09-30 | 2007-07-04 | 株式会社東芝 | 動画像符号化方法と装置及び動画像復号化方法と装置 |
| JP2004135252A (ja) * | 2002-10-09 | 2004-04-30 | Sony Corp | 符号化処理方法、符号化装置及び復号化装置 |
| MXPA06002210A (es) * | 2003-08-26 | 2006-05-19 | Thomson Licensing | Metodo y aparato para la decodificacion de bloques intra-inter codificados hibridos. |
| US20070230805A1 (en) * | 2004-07-27 | 2007-10-04 | Yoshihisa Yamada | Coded Data Recording Apparatus, Decoding Apparatus and Program |
| CN1658673A (zh) * | 2005-03-23 | 2005-08-24 | 南京大学 | 视频压缩编解码方法 |
| US20070058713A1 (en) * | 2005-09-14 | 2007-03-15 | Microsoft Corporation | Arbitrary resolution change downsizing decoder |
| US20090141814A1 (en) * | 2006-01-09 | 2009-06-04 | Peng Yin | Method and Apparatus for Providing Reduced Resolution Update Mode for Multi-View Video Coding |
| EP1835749A1 (en) * | 2006-03-16 | 2007-09-19 | THOMSON Licensing | Method for coding video data of a sequence of pictures |
| KR100829169B1 (ko) * | 2006-07-07 | 2008-05-13 | 주식회사 리버트론 | H.264 코딩의 압축모드 예측 장치 및 방법 |
| US8428118B2 (en) * | 2006-08-17 | 2013-04-23 | Ittiam Systems (P) Ltd. | Technique for transcoding MPEG-2/MPEG-4 bitstream to H.264 bitstream |
| CN100508610C (zh) * | 2007-02-02 | 2009-07-01 | 清华大学 | H.264/avc视频编码中速率和失真的快速估计方法 |
| JP2010135864A (ja) * | 2007-03-29 | 2010-06-17 | Toshiba Corp | 画像符号化方法及び装置並びに画像復号化方法及び装置 |
| US8488668B2 (en) * | 2007-06-15 | 2013-07-16 | Qualcomm Incorporated | Adaptive coefficient scanning for video coding |
| KR100949917B1 (ko) * | 2008-05-28 | 2010-03-30 | 한국산업기술대학교산학협력단 | 적응적 인트라 예측을 통한 고속 부호화 방법 및 시스템 |
| US20100111166A1 (en) * | 2008-10-31 | 2010-05-06 | Rmi Corporation | Device for decoding a video stream and method thereof |
-
2009
- 2009-12-11 WO PCT/US2009/006505 patent/WO2010090629A1/en active Application Filing
- 2009-12-11 EP EP09839790.4A patent/EP2394431A4/en not_active Ceased
- 2009-12-11 CN CN200980156246.5A patent/CN102308580B/zh not_active Expired - Fee Related
- 2009-12-11 BR BRPI0924265A patent/BRPI0924265A2/pt not_active IP Right Cessation
- 2009-12-11 JP JP2011549131A patent/JP6088141B2/ja not_active Expired - Fee Related
- 2009-12-11 KR KR1020117020447A patent/KR101690291B1/ko active IP Right Grant
- 2009-12-11 US US13/138,239 patent/US20110286513A1/en not_active Abandoned
-
2015
- 2015-06-17 JP JP2015122452A patent/JP2015165723A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP2394431A4 (en) | 2013-11-06 |
| US20110286513A1 (en) | 2011-11-24 |
| KR20110110855A (ko) | 2011-10-07 |
| CN102308580A (zh) | 2012-01-04 |
| JP2015165723A (ja) | 2015-09-17 |
| CN102308580B (zh) | 2016-05-04 |
| KR101690291B1 (ko) | 2016-12-27 |
| JP2012517186A (ja) | 2012-07-26 |
| BRPI0924265A2 (pt) | 2016-01-26 |
| WO2010090629A1 (en) | 2010-08-12 |
| EP2394431A1 (en) | 2011-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6088141B2 (ja) | 適応型のモード・ビデオ符号化および復号を行うための方法および装置 | |
| JP6688341B2 (ja) | ビデオエンコーダおよびデコーダについての大きなブロックにつきイントラ予測を信号伝達する方法および装置 | |
| US11388440B2 (en) | Method and apparatus for a low complexity transform unit partitioning structure for HEVC | |
| JP6708700B2 (ja) | 統一された有意性マップ符号化方法および装置 | |
| JP6329186B2 (ja) | 改善されたイントラ・クロマ符号化および復号のための方法および装置 | |
| JP6541274B2 (ja) | 動画像シーケンスの動画像フレームを復号する復号方法および装置 | |
| JP6461355B2 (ja) | 画像を符号化または復号する装置、方法、プログラム | |
| JP6110978B2 (ja) | 高効率映像符号化のデルタ量子化パラメータ処理の方法と装置 | |
| JP6234994B2 (ja) | ビデオ・コーディングのためのウェーブフロント並列処理 | |
| JP6162150B2 (ja) | ビデオコーディング用の残差4分木(rqt)コーディング | |
| JP6165798B2 (ja) | イントラ予測を使用したビデオ符号化 | |
| JP6174123B2 (ja) | ビデオコーディングにおける量子化パラメータ(qp)コーディング | |
| JP5886425B2 (ja) | ビデオコーディングのための適応パラメータセット | |
| KR101632776B1 (ko) | 비디오 코딩에 대한 구문 엘리먼트들의 공동 코딩 | |
| JP5869493B2 (ja) | ビデオ符号化および復号化のためのテンプレート・マッチング予測の適応型残差更新のための方法および装置 | |
| JP5886440B2 (ja) | イントラ予測ビデオコーディングにおける非正方形変換 | |
| JP6266605B2 (ja) | 映像コーディングにおけるロスレスコーディングモード及びパルスコード変調(pcm)モードのシグナリングの統一 | |
| JP6005520B2 (ja) | 映像符号化及び復号化におけるインターフレームの改善された色度変換の方法及び装置 | |
| TW202029765A (zh) | 用於編碼或解碼轉換塊的方法與裝置 | |
| JP6239609B2 (ja) | ビデオコーディングのための長期参照ピクチャをシグナリングすること | |
| JP2018530962A (ja) | ビデオコーディングのためのパレット予測子初期化およびマージ | |
| JP2016534649A (ja) | イントラブロックコピー実行時の領域決定 | |
| JP2015516768A (ja) | 変換係数コーディング | |
| KR20210063483A (ko) | 적응적 트리 선택을 사용한 이진 집합의 비디오 인코딩 및 디코딩을 위한 방법 및 장치 | |
| KR20150003277A (ko) | 비디오 코딩에서의 바이패스 코딩된 구문 엘리먼트들의 그룹화 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120904 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120907 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121211 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140114 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140414 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140421 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140714 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150217 |
|
| A524 | Written submission of copy of amendment under section 19 (pct) |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20150617 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20150625 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20150925 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161117 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20161202 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20161202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170203 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6088141 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |