JP6027560B2 - 自動追尾撮像装置 - Google Patents
自動追尾撮像装置 Download PDFInfo
- Publication number
- JP6027560B2 JP6027560B2 JP2014028339A JP2014028339A JP6027560B2 JP 6027560 B2 JP6027560 B2 JP 6027560B2 JP 2014028339 A JP2014028339 A JP 2014028339A JP 2014028339 A JP2014028339 A JP 2014028339A JP 6027560 B2 JP6027560 B2 JP 6027560B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- optical system
- wide
- telephoto
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/58—Means for changing the camera field of view without moving the camera body, e.g. nutating or panning of optics or image sensors
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B15/00—Special procedures for taking photographs; Apparatus therefor
- G03B15/16—Special procedures for taking photographs; Apparatus therefor for photographing the track of moving objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
- H04N23/611—Control of cameras or camera modules based on recognised objects where the recognised objects include parts of the human body
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/69—Control of means for changing angle of the field of view, e.g. optical zoom objectives or electronic zooming
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/695—Control of camera direction for changing a field of view, e.g. pan, tilt or based on tracking of objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/698—Control of cameras or camera modules for achieving an enlarged field of view, e.g. panoramic image capture
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
- H04N23/84—Camera processing pipelines; Components thereof for processing colour signals
- H04N23/843—Demosaicing, e.g. interpolating colour pixel values
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/10—Circuitry of solid-state image sensors [SSIS]; Control thereof for transforming different wavelengths into image signals
- H04N25/11—Arrangement of colour filter arrays [CFA]; Filter mosaics
- H04N25/13—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements
- H04N25/134—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements based on three different wavelength filter elements
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/56—Accessories
- G03B17/561—Support related camera accessories
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B41/00—Special techniques not covered by groups G03B31/00 - G03B39/00; Apparatus therefor
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/189—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems
- G08B13/194—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems
- G08B13/196—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems using television cameras
- G08B13/19602—Image analysis to detect motion of the intruder, e.g. by frame subtraction
- G08B13/19608—Tracking movement of a target, e.g. by detecting an object predefined as a target, using target direction and or velocity to predict its new position
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/189—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems
- G08B13/194—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems
- G08B13/196—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems using television cameras
- G08B13/19617—Surveillance camera constructional details
- G08B13/1963—Arrangements allowing camera rotation to change view, e.g. pivoting camera, pan-tilt and zoom [PTZ]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/10—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from different wavelengths
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/667—Camera operation mode switching, e.g. between still and video, sport and normal or high- and low-resolution modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/673—Focus control based on electronic image sensor signals based on contrast or high frequency components of image signals, e.g. hill climbing method
Description
図1は本発明に係る自動追尾撮像装置の外観斜視図である。
図2は、自動追尾撮像装置10の撮像部11の第1の実施形態を示す断面図である。
撮影光学系12は、それぞれ同一の光軸上に配置された、第1の光学系としての中央部の中央光学系13と、その周辺部の同心円状の第2の光学系としての環状光学系14とから構成されている。
指向性センサ17は、マイクロレンズアレイ16とイメージセンサ18とから構成されている。
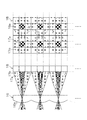
図4は、イメージセンサ18に配設されたカラーフィルタ配列等を示す図である。尚、図4上で、マイクロレンズアレイ16は省略されているが、円形で示した領域は、マイクロレンズアレイ16の各マイクロレンズ16aにより瞳像が結像される3×3個の受光セルを含む単位ブロックを示している。
図5は、自動追尾撮像装置10の内部構成の実施形態を示すブロック図である。
図9は、本発明に係る自動追尾撮像装置による自動追尾制御方法の一例を示すフローチャートであり、モード選択部56により第1の追尾モードが選択された場合に関して示している。
図11は、指向性センサの他の実施形態を示す側面図である。
次に、本発明に係る自動追尾撮像装置に適用される撮像部の他の実施形態について説明する。
本実施形態の自動追尾撮像装置10は、撮像部11をパン方向及びチルト方向に回動させるパン・チルト機構32が装置本体2に設けられているが、これに限らず、撮像装置全体を電動雲台(パン・チルト装置)に搭載したものでもよい。尚、本発明に係る自動追尾撮像装置は、例えば、監視カメラ、車載カメラとして使用することができる。
Claims (12)
- 中央部の第1の光学系と、前記第1の光学系の周辺部に設けられ、前記第1の光学系と同一の光軸を有する第2の光学系とからなり、これらの光学系のうちの一方が広角光学系であり、他方が望遠光学系である撮影光学系と、
2次元状に配列された光電変換素子により構成された複数の画素を有する指向性センサであって、前記広角光学系及び前記望遠光学系を介して入射する光束をそれぞれ瞳分割して選択的に受光する指向性センサと、
前記撮影光学系及び指向性センサを含む撮像部を水平方向及び垂直方向に回動させるパン・チルト機構と、
前記指向性センサから前記広角光学系を介して受光した広角画像と前記望遠光学系を介して受光した望遠画像とをそれぞれ取得する画像取得部と、
前記画像取得部が取得した広角画像及び望遠画像のうちの少なくとも広角画像に基づいて追尾対象の物体を検出する物体検出部と、
前記物体検出部により検出された物体の画像中における位置情報に基づいて前記パン・チルト機構を制御するパン・チルト制御部と、
を備えた自動追尾撮像装置。 - 前記画像取得部が取得した広角画像及び望遠画像のうちの少なくとも望遠画像を記録する記録部を備えた請求項1に記載の自動追尾撮像装置。
- 前記物体検出部は、前記画像取得部が連続して取得した広角画像及び望遠画像のうちの少なくとも広角画像に基づいて動体を検出し、前記検出した動体を追尾対象の物体とする請求項1又は2に記載の自動追尾撮像装置。
- 前記物体検出部は、前記画像取得部が取得した広角画像及び望遠画像のうちの少なくとも広角画像に基づいて特定の物体を認識し、前記認識した特定の物体を追尾対象の物体とする請求項1又は2に記載の自動追尾撮像装置。
- 前記パン・チルト制御部は、前記物体検出部により検出した物体の画像中における位置情報に基づいて前記パン・チルト機構を制御し、前記検出した物体を少なくとも前記望遠画像の画角に入れる請求項1から4のいずれか1項に記載の自動追尾撮像装置。
- 前記物体検出部は、前記画像取得部が取得した望遠画像に基づいて前記物体を検出する第1の物体検出部と、前記画像取得部が取得した広角画像に基づいて前記物体を検出する第2の物体検出部とを有し、
前記パン・チルト制御部は、前記第1の物体検出部により検出された物体の望遠画像中における位置情報に基づいて前記パン・チルト機構を制御し、前記第1の物体検出部により前記物体が検出できなかったときは、前記第2の物体検出部により検出された物体の広角画像中における位置情報に基づいて前記パン・チルト機構を制御する請求項1から5のいずれか1項に記載の自動追尾撮像装置。 - 第1の追尾モード又は第2の追尾モードを選択するモード選択部を備え、
前記パン・チルト制御部は、前記モード選択部により第1の追尾モードが選択されると、前記第2の物体検出部により検出された物体の広角画像中における位置情報のみに基づいて前記パン・チルト機構を制御し、前記モード選択部により第2の追尾モードが選択されると、前記第1の物体検出部により検出された物体の望遠画像中における位置情報に基づいて前記パン・チルト機構を制御し、前記第1の物体検出部により前記物体が検出できなかったときは、前記第2の物体検出部により検出された物体の広角画像中における位置情報に基づいて前記パン・チルト機構を制御する請求項6に記載の自動追尾撮像装置。 - 前記撮影光学系の第1の光学系は円形の中央光学系であり、前記第2の光学系は前記中央光学系に対して同心円状に配設された環状光学系である請求項1から7のいずれか1項に記載の自動追尾撮像装置。
- 前記環状光学系は、光束を2回以上反射させる反射光学系を有する請求項8に記載の自動追尾撮像装置。
- 前記第1の光学系が広角光学系であり、前記第2の光学系が望遠光学系である請求項1から9のいずれか1項に記載の自動追尾撮像装置。
- 前記望遠光学系の焦点調整を行う焦点調整部を有する請求項1から10のいずれか1項に記載の自動追尾撮像装置。
- 前記指向性センサは、瞳分割手段として機能するマイクロレンズアレイ又は遮光マスクを有する請求項1から11のいずれか1項に記載の自動追尾撮像装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014028339A JP6027560B2 (ja) | 2014-02-18 | 2014-02-18 | 自動追尾撮像装置 |
| PCT/JP2014/083090 WO2015125388A1 (ja) | 2014-02-18 | 2014-12-15 | 自動追尾撮像装置 |
| CN201480074827.5A CN105960796B (zh) | 2014-02-18 | 2014-12-15 | 自动跟踪摄像装置 |
| EP14883490.6A EP3110132B1 (en) | 2014-02-18 | 2014-12-15 | Automatic tracking image-capture apparatus |
| US15/206,617 US9924084B2 (en) | 2014-02-18 | 2016-07-11 | Auto-tracking imaging apparatus including wide-angle and telephoto optical systems |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014028339A JP6027560B2 (ja) | 2014-02-18 | 2014-02-18 | 自動追尾撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015154386A JP2015154386A (ja) | 2015-08-24 |
| JP2015154386A5 JP2015154386A5 (ja) | 2016-05-12 |
| JP6027560B2 true JP6027560B2 (ja) | 2016-11-16 |
Family
ID=53877917
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014028339A Active JP6027560B2 (ja) | 2014-02-18 | 2014-02-18 | 自動追尾撮像装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9924084B2 (ja) |
| EP (1) | EP3110132B1 (ja) |
| JP (1) | JP6027560B2 (ja) |
| CN (1) | CN105960796B (ja) |
| WO (1) | WO2015125388A1 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6077967B2 (ja) * | 2013-08-27 | 2017-02-08 | 富士フイルム株式会社 | 撮像装置 |
| WO2015098110A1 (ja) * | 2013-12-27 | 2015-07-02 | パナソニックIpマネジメント株式会社 | 撮像装置、撮像システムおよび撮像方法 |
| KR102269601B1 (ko) * | 2014-01-14 | 2021-06-28 | 삼성전자주식회사 | 이중 초점 렌즈 및 이를 포함하는 촬상 장치 |
| TWI518437B (zh) * | 2014-05-12 | 2016-01-21 | 晶睿通訊股份有限公司 | 動態對焦調整系統及其動態對焦調整方法 |
| US9521830B2 (en) * | 2014-08-21 | 2016-12-20 | Identiflight, Llc | Bird or bat detection and identification for wind turbine risk mitigation |
| EP3183687B1 (en) | 2014-08-21 | 2020-07-08 | IdentiFlight International, LLC | Avian detection system and method |
| EP3214832B1 (en) * | 2014-10-31 | 2019-11-27 | Fujifilm Corporation | Imaging device and method for recognizing target object |
| US9762812B2 (en) * | 2015-10-30 | 2017-09-12 | Raytheon Company | Dual-field-of-view optical system |
| USD811462S1 (en) | 2015-11-16 | 2018-02-27 | Axis Ab | Monitoring camera |
| US10761417B2 (en) * | 2015-11-30 | 2020-09-01 | Lg Electronics Inc. | Smart watch and method for controlling same |
| CN105718887A (zh) * | 2016-01-21 | 2016-06-29 | 惠州Tcl移动通信有限公司 | 基于移动终端摄像头实现动态捕捉人脸摄像的方法及系统 |
| WO2017199559A1 (ja) * | 2016-05-17 | 2017-11-23 | 富士フイルム株式会社 | 撮像装置、撮像方法、プログラム、及び非一時的記録媒体 |
| EP3461127B1 (en) * | 2016-05-17 | 2024-03-06 | FUJIFILM Corporation | Stereo camera and stereo camera control method |
| WO2018045319A1 (en) * | 2016-09-01 | 2018-03-08 | Catalyft Labs, Inc. | Multi-functional weight rack and exercise monitoring system for tracking exercise movements |
| KR20180070264A (ko) * | 2016-12-16 | 2018-06-26 | 삼성전자주식회사 | 패닝 샷 이미지 획득 방법 및 이를 지원하는 전자 장치 |
| CN110574359B (zh) * | 2017-05-16 | 2021-03-02 | 富士胶片株式会社 | 摄像装置及图像合成装置 |
| WO2018235565A1 (ja) * | 2017-06-21 | 2018-12-27 | 富士フイルム株式会社 | 撮像装置及び移動撮像装置 |
| JP2019080226A (ja) * | 2017-10-26 | 2019-05-23 | キヤノン株式会社 | 撮像装置、撮像装置の制御方法、及びプログラム |
| US10593014B2 (en) * | 2018-03-26 | 2020-03-17 | Ricoh Company, Ltd. | Image processing apparatus, image processing system, image capturing system, image processing method |
| JP2019186630A (ja) * | 2018-04-03 | 2019-10-24 | キヤノン株式会社 | 撮像装置及びその制御方法及びプログラム |
| EP3564917B1 (en) * | 2018-05-04 | 2020-07-01 | Axis AB | A method for detecting motion in a video sequence |
| CN108429881A (zh) * | 2018-05-08 | 2018-08-21 | 山东超景深信息科技有限公司 | 免通过反复变焦取景的长焦拍摄云台相机系统应用方法 |
| JP7120835B2 (ja) * | 2018-07-18 | 2022-08-17 | トヨタ自動車株式会社 | 画像処理装置 |
| JP7262997B2 (ja) * | 2018-12-27 | 2023-04-24 | キヤノン株式会社 | 制御装置、撮像装置、および、プログラム |
| AT522115A1 (de) * | 2019-01-24 | 2020-08-15 | Zactrack Gmbh | Bühnentechnische Vorrichtung und Verfahren zur Bestimmung einer Korrelationsfunktion |
| CN110602389B (zh) * | 2019-08-30 | 2021-11-02 | 维沃移动通信有限公司 | 一种显示方法及电子设备 |
| KR20210028808A (ko) | 2019-09-04 | 2021-03-15 | 삼성전자주식회사 | 이미지 센서 및 이를 포함하는 촬상 장치 |
| JP7354773B2 (ja) * | 2019-11-01 | 2023-10-03 | 株式会社Jvcケンウッド | 物体検出装置、物体検出方法、及び物体検出プログラム |
| JP7467114B2 (ja) * | 2019-12-27 | 2024-04-15 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| CN111487647A (zh) * | 2020-03-31 | 2020-08-04 | 中国科学院西安光学精密机械研究所 | 一种基于逆向反射背景的主动照明的高速目标探测装置及方法 |
| US11595575B2 (en) * | 2020-05-11 | 2023-02-28 | Samsung Electronics Co., Ltd. | Image sensor |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1169342A (ja) | 1997-08-22 | 1999-03-09 | Hitachi Denshi Ltd | 侵入物体追尾画像処理システム |
| EP0878965A3 (en) | 1997-05-14 | 2000-01-12 | Hitachi Denshi Kabushiki Kaisha | Method for tracking entering object and apparatus for tracking and monitoring entering object |
| US6734911B1 (en) | 1999-09-30 | 2004-05-11 | Koninklijke Philips Electronics N.V. | Tracking camera using a lens that generates both wide-angle and narrow-angle views |
| US7408703B2 (en) | 2001-11-13 | 2008-08-05 | Matsushita Electric Industrial Co., Ltd. | Wide-angle imaging optical system and wide-angle imaging apparatus surveillance imaging apparatus vehicle-mounted imaging apparatus and projection apparatus using the wide-angle imaging optical system |
| JP4140567B2 (ja) | 2004-07-14 | 2008-08-27 | 松下電器産業株式会社 | 物体追跡装置および物体追跡方法 |
| CN1267763C (zh) * | 2004-09-24 | 2006-08-02 | 清华大学 | 一种长焦距大视场无活动部件的微型目标探测系统 |
| JP2006333120A (ja) * | 2005-05-26 | 2006-12-07 | Denso Corp | 撮像モジュール |
| JP5074747B2 (ja) | 2006-11-22 | 2012-11-14 | キヤノン株式会社 | 光学装置、撮像装置、制御方法、及びプログラム |
| JP2008197540A (ja) * | 2007-02-15 | 2008-08-28 | Funai Electric Co Ltd | 広角撮像装置 |
| JP5201957B2 (ja) * | 2007-11-21 | 2013-06-05 | キヤノン株式会社 | 撮像装置 |
| US7764440B2 (en) * | 2007-11-27 | 2010-07-27 | Eastman Kodak Company | Dual focal length lens system |
| JP2010141671A (ja) * | 2008-12-12 | 2010-06-24 | Canon Inc | 撮像装置 |
| JP5466766B2 (ja) * | 2010-10-01 | 2014-04-09 | 富士フイルム株式会社 | 撮像装置 |
| US9063352B2 (en) * | 2010-10-11 | 2015-06-23 | The Regents Of The University Of California | Telescopic contact lens |
| JP5693379B2 (ja) * | 2011-05-27 | 2015-04-01 | 富士フイルム株式会社 | 撮像装置 |
| JP5634946B2 (ja) * | 2011-06-06 | 2014-12-03 | 富士フイルム株式会社 | 撮像装置 |
| WO2013027488A1 (ja) * | 2011-08-24 | 2013-02-28 | 富士フイルム株式会社 | 撮像装置 |
-
2014
- 2014-02-18 JP JP2014028339A patent/JP6027560B2/ja active Active
- 2014-12-15 CN CN201480074827.5A patent/CN105960796B/zh active Active
- 2014-12-15 WO PCT/JP2014/083090 patent/WO2015125388A1/ja active Application Filing
- 2014-12-15 EP EP14883490.6A patent/EP3110132B1/en active Active
-
2016
- 2016-07-11 US US15/206,617 patent/US9924084B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN105960796B (zh) | 2019-08-16 |
| EP3110132A1 (en) | 2016-12-28 |
| JP2015154386A (ja) | 2015-08-24 |
| CN105960796A (zh) | 2016-09-21 |
| EP3110132A4 (en) | 2017-03-01 |
| US20160323504A1 (en) | 2016-11-03 |
| EP3110132B1 (en) | 2021-06-30 |
| WO2015125388A1 (ja) | 2015-08-27 |
| US9924084B2 (en) | 2018-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6027560B2 (ja) | 自動追尾撮像装置 | |
| JP6302085B2 (ja) | 撮像装置及び対象物認識方法 | |
| JP6641470B2 (ja) | ステレオカメラ及びステレオカメラの制御方法 | |
| JP6214481B2 (ja) | 撮像装置 | |
| KR20160075583A (ko) | 이미지들을 캡처 및/또는 조합하기 위한 방법들 및 장치 | |
| JP2016046772A (ja) | 車載カメラ | |
| US10552963B2 (en) | Imaging device, imaging method, and non-transitory recording medium | |
| JP2016048824A (ja) | 追尾装置、追尾システム、及び表示装置 | |
| JP2018134712A (ja) | ロボットシステム及びロボットシステムの制御方法 | |
| JP2016048825A (ja) | 撮像装置 | |
| JP2016046771A (ja) | 撮像装置、撮像システム及び表示装置 | |
| JP2016046774A (ja) | 撮像装置 | |
| JP2016048282A (ja) | 撮像装置 | |
| JP2016046773A (ja) | 撮像装置 | |
| WO2020066341A1 (ja) | 合焦度検出装置、深度マップ生成装置、及び、電子機器 | |
| JP2004086401A (ja) | 対象物認識装置および方法 | |
| CN114302046A (zh) | 应用于屏下的摄像装置 | |
| JP2018101081A (ja) | 撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160309 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160315 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161014 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6027560 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |