JP6010925B2 - 撮影装置、撮影制御方法及びプログラム - Google Patents
撮影装置、撮影制御方法及びプログラム Download PDFInfo
- Publication number
- JP6010925B2 JP6010925B2 JP2012043242A JP2012043242A JP6010925B2 JP 6010925 B2 JP6010925 B2 JP 6010925B2 JP 2012043242 A JP2012043242 A JP 2012043242A JP 2012043242 A JP2012043242 A JP 2012043242A JP 6010925 B2 JP6010925 B2 JP 6010925B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- display
- orientation
- detected
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Description
例えば、地図帳と共に携帯し、旅行などに行った場合に、地図帳の上に方位計を乗せ、どちらの方向に目的地があるのか、どの方向に自分が歩行しているのかを調べたりする場合などに使用されている。
ところで、近年、撮影装置として、GPSユニット及び方位計を備え、モニタ(表示部)に現在位置を含む地図画像と方位とを合わせて表示する撮影装置が知られている(例えば、特許文献1)。
このような撮影装置を携帯すれば、別途地図帳や方位計を個別に持ち歩くことなく、現在位置や目的地の方角、進行方向を調べることができる。
例えば、オリエンテーリングなどで実際の景色の中で方位を直感的に知りたい場合があり、この場合、上記撮影装置を使用するときには、地図画像と方位とを表示するだけなので、実際の景色の中で方位を直感的に確認することができない。
すなわち、上記撮影装置によって実際の景色の中で方位を確認するためには、まず、地図画像上で方位を確認した上で、この地図画像上の方位を参酌して実際の景色の中で方位を見つけなければならず、方位の確認が間接的になるので、不便である。
さらに、家屋の中の窓や玄関の方位などを調べたりする場合には、地図画像には家屋の内部までは詳細に表示されないため、家屋の中の物の方位を簡単には調べることはできないという問題が生じる。
また、本発明の他の態様による撮影装置は、表示部、撮像部及び方位検出部を備えている撮影装置において、前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御手段と、前記撮影装置の姿勢を検出する姿勢検出手段と、を備え、前記方位表示制御手段は、前記姿勢検出手段により下向きの姿勢が検出された際は、現在位置に対応した地図画像を前記表示部に表示するとともに、当該地図画像内の所定位置からの線分の方向で前記方位検出部により検出された方位を識別する表示情報を当該地図画像に重ねて前記表示部に表示させる、ことを特徴とする。
また、本発明の他の態様による撮影装置は、表示部、撮像部及び方位検出部を備えている撮影装置において、前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御手段と、前記撮影装置の姿勢を検出する姿勢検出手段と、前記方位を示す表示情報に対して所定画像を重ねて前記表示部に表示させる画像表示制御手段と、を備え、前記画像表示制御手段は、前記姿勢検出手段により検出される姿勢の違いに応じて、前記方位を示す表示情報に重ねて表示する前記所定画像の種類を、現在位置に対応した地図画像と前記撮像部により撮影された撮影画像と天空の星景色画像とを含む複数の種類の中から選択することを特徴とする。
このデジタルカメラ1は、図1(A)に示すように撮影装置本体1Aの正面側に撮像レンズ2を有している。一方、デジタルカメラ1の背面には、図1(B)に示すように、モードダイアル3、表示部4、カーソルキー5、SETキー6等が設けられている。また、上面には図1(C)に示すように、シャッターキー8及び電源ボタン9が設けられ、側部にはパーソナルコンピュータ(以下、パソコン)やモデム等の外部装置とUSBケーブルに接続する場合に用いるUSB端子接続部7が設けられている。
ROM12は、例えば、EPROM、EEPROM又はフラッシュメモリ等によって構成され、このROM12には、緯度及び経度に対応付けられた景勝地データや星景色データ等が格納されている。この景勝地データとしては、例えば、景勝地名データ及び景勝地写真データが格納されている。このうち後者の景勝地写真データは、景勝地を予め撮影して得られた写真の画像データである。また、星景色データとしては、星景色の写真その他の画像データ及び星座名データが格納されている。
この3軸加速度センサ16からの加速度データによってCPU10は、撮影装置本体1Aの姿勢を判定する。具体的には、CPU10は、図3に示すように、3軸加速度センサ16からの加速度データに基づいて、撮影装置本体1Aの撮影レンズの光軸Kの向きが水平から上下に45°の範囲内にあるときには横向き姿勢、撮影レンズの光軸Kの向きが水平から上方45°を超えている場合には上向き姿勢、撮影レンズの光軸Kの向きが水平から下方45°を超えている場合には下向き姿勢と判定する。なお、姿勢変更に伴う不要な画面変更を避けるため、一定時間(例えば1秒程度)の不感帯を設けることが好ましい。
このうち、画像記憶領域221は、撮像装置21において取得された画像データを記憶するための領域である。この画像データには、撮影地点の位置及び撮影時刻が対応付けられている。
位置記憶領域222は、GPS受信部14によって取得された位置データを順次記憶するための領域である。この位置データには時刻が対応付けられ、移動履歴が検出できるようにされている。
姿勢記憶領域223は、3軸加速度センサ16によって取得された加速度データに基づいてCPU10によって判定された姿勢データを記憶するための領域である。この姿勢データには、当該姿勢データを得た時刻が対応付けられている。
方位記憶領域224は、3軸地磁気センサ17によって取得された磁界データに基づいてCPU10によって算出された方位データを記憶するための領域である。この方位データには、当該方位データを算出した時刻が対応付けられている。
図4は、表示変更処理を示すフローチャートである。この表示変更処理は、入力装置20を通じて方位表示モードが選択された際にCPU10とROM12に記憶されているプログラムとの協働により実行される。
すなわち、GPS受信部14において、GPS受信アンテナ13を介して受信されるGPS衛星からの信号の復調処理が行われることによりGPS衛星の各種送信データが取得され、取得された送信データに基づいて所定の測位演算が行われることにより、現在位置を表わす位置データが取得される(ステップS1)。なお、必要ならば、GPSで初期位置を決定した後、3軸加速度センサ16及び3軸地磁気センサ17から得られる情報で自律位置推定して、現在位置を表す位置データを取得してもよい。これによって取得された位置データはCPU10に出力され、記憶装置22の位置記憶領域222に現在の時刻データと対応付けて記憶される(ステップS1)。
また、3軸地磁気センサ17は3軸方向の磁界データをCPU10に出力する。そして、CPU10は、この磁界データに基づいて、現在地を通る基準方位(子午線及び緯線の方向)を算出(取得)し、その方位データを記憶装置22の方位記憶領域224に記憶させる(ステップS2)。
さらに、3軸加速度センサ16は3軸方向の加速度データをCPU10に出力する。そして、CPU10は、この加速度データに基づいて、現在のデジタルカメラ1の姿勢(横向き姿勢、上向き姿勢、下向き姿勢の別)を判定し(ステップS3)、その姿勢データを記憶装置22の姿勢記憶領域223に記憶させる。
また、CPU10は、方位データに基づいて、現在地を通る子午線及び緯線(基準方位)の方向を指し示す線分30b,30c及び基準方位の表記(実施形態では北の方角を示すN)30dを地図画像30aの中に表示させる。この場合、現在地は表示部4に表示される地図画像30aの中心に表示される。
また、CPU10は、地図画像30aの表示倍率に基づいて、等距離線データを生成し、等距離線30eを表示部4に地図画像30aと合わせて表示させる。この等距離線30eは、現在地からの距離を指し示す線分であり、現在地から等距離にある部分を繋いで得られた円状の線分となっている。そして、線分には、距離を分かり易くするために距離表記(50m、200mの表記)30fが施されている。
なお、ここでは、地図画像を平面的なものとしているが、平面的な地図画像に代えて、所定高さ位置から俯瞰した地図画像(俯瞰地図画像)を生成し、この俯瞰地図画像と方位とを表示部4に表示させてもよい。また、ここでは、子午線の線分30bの延在方向が表示部4の上下方向(図4の上下方向)、緯線の線分30cの延在方向が表示部4の左右方向(図4の左右方向)となるように地図画像30aを表示させているが、姿勢データ及び方位データに基づいて撮影装置本体1Aの所定の面(例えば撮影装置本体1Aの上面)の法線の向きを検出し、表示部4に表示される地図画像上の子午線及び緯線の線分30b,30cの延在方向と実際上の子午線及び緯線の延在方向とが合致するように地図画像30aを表示させてもよい。このようにすれば、表示部4に表示される地図画像30aがより一層利用しやすいものとなる。
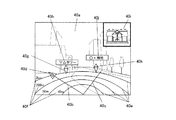
そして、CPU10は、方位データに基づき現在地を通る子午線及び緯線の線分40b,40cを生成し、この子午線及び緯線の線分40b,40c及び基準方位の表記(実施形態では北の方角を示すN)40dをスルー画像40a上に合わせて表示部4に表示させる(ステップS6)。
この場合の子午線及び緯線の線分40b,40cは、俯瞰によって形成された線分となっている。すなわち、子午線及び緯線の線分40b、40cは、現在地の地表面から所定の高さ位置に視点をおいて、地表面に描かれた仮想の子午線及び緯線を見下ろした場合に得られる線分となっている。このようにすれば、視点の高さで表示する場合に比べて、子午線及び緯線の方向がより見易いものとなる。なお、表示部4の上での現在地は表示部4の下端幅方向中央である。
さらにCPU10は、スルー画像40aの表示倍率及び仰角に基づいて、等距離線データを生成し、等距離線40eを表示部4にスルー画像40aと合わせて表示させる。この場合の仰角は3軸加速度センサ16の加速度データに基づいてCPU10によって算出される。この等距離線40eは、現在地からの距離を指し示す線分であり、現在地から等距離にある部分を繋いで得られた弧状の線分となっている。なお、この等距離線40eも俯瞰の線分となっている。すなわち、図8に示すように、この等距離線40eは、現在地の地表面から所定の高さ位置に視点をおいて地表面の仮想の等距離線を見下ろした場合に得られる線分となっている。この実施形態では、この等距離線40eは、例えば、現在地から10m、50m、200m、2km離れた場所をそれぞれ指し示す弧状の線分として形成されている。そして、各線分には、距離を分かり易くするために距離表記(10m、50m、200m、2kmの表記)40fが施されている。なお、この場合の等距離線40eは、必ずしも正確に距離を指し示すものになっていなくてよく、後述の景勝地までの距離を指示できるものであれば足りる。
例えば、景勝地が現在地から北北東の2kmの距離にあるとすれば、スルー画像40a上で北北東の方角で且つ景勝地マーク40gの下端が2kmの線分に重なり合う位置に景勝地マーク40gが表示される。したがって、スルー画像40a上で景勝地マーク40gの表示位置を見れば、景勝地までの距離及び方角がそのスルー画像40a上で、一目で分かることになる。なお、この場合の現在地からの景勝地の距離及び方角は、CPU10が現在地及び景勝地の緯度及び経度に基づいて検出するか、或いはCPU10が地図データに基づいて検出する。
なお、この場合、CPU10は、表示部4に表示された星景色画像50aでの基準方位と実際の基準方位とが同じ向きとなるように星景色画像50aを表示することが好ましい。このようにすれば、現時点でどの方向にどの星座が見えるのかが容易に分かることになる。
すなわち、デジタルカメラ1を下向き姿勢にすれば、平面的な地図画像30aと方位とが表示されるので、大局的に地図画像上の現在位置、当該現在位置から見た目的地及び当該現在位置から見た方位をそれぞれ知ることができる。
また、デジタルカメラ1を横向き姿勢にすれば、実際の景色を示す撮影画像であるスルー画像40aと方位とが表示されるので、実際の景色と、当該景色の中での築造物や自然物の方位とを互いに関連付けて、迅速かつ容易に知ることができる。
さらに、デジタルカメラ1を上向き姿勢にすれば、天空の星座景色画像50aと方位とが表示されるので、現在位置から見た、所望とする星座と当該現在位置から見た方位とを迅速かつ容易に発見できることになる。
このようにデジタルカメラ1の姿勢に応じて、表示部4に現れる画像が変化し、変化した画像と当該画像中における方位とを迅速かつ容易に知ることができるので、デジタルカメラ1の使用用途が拡大されることになる。
まず、撮影装置としてデジタルカメラ1を例に説明したが、携帯電話その他の撮影装置にも本発明は適用可能である。
また、例えば、横向き姿勢の場合に表示部4に表示される撮影画像であるスルー画像その他の画像を保存しておき、後日においても、プリントアウトして楽しめるようにしてもよい。
さらに、上記実施形態では、景勝地に関する画像、撮影ポイントに関する画像をスルー画像40aと共に表示するようにしたが、地図画像30aと共にこれらを表示することも可能である。
〔付記〕
<請求項1>
撮影装置本体、表示部、撮像部及び方位検出部を備えている撮影装置において、
前記撮影装置本体の姿勢を検出する姿勢検出手段と、
この姿勢検出手段により異なる姿勢が検出された際、当該異なる姿勢に応じて、前記方位検出部により検出された方位を互いに異なる表示形態で前記表示部に表示させる表示制御手段と、
を備えていることを特徴とする撮影装置。
<請求項2>
前記姿勢検出手段により異なる姿勢が検出された際、当該異なる姿勢に応じて、前記方位に対して種類の異なる画像を重ねて前記表示部に表示させる画像表示制御手段を備えていることを特徴とする請求項1に記載の撮影装置。
<請求項3>
前記種類の異なる画像は、現在位置に対応した地図画像および前記撮像部により撮影された撮影画像であることを特徴とする請求項2に記載の撮影装置。
<請求項4>
前記撮影装置本体の現在位置を取得する位置取得手段をさらに備え、
前記表示制御手段は、前記姿勢検出手段により異なる姿勢のうち、第1の姿勢が検出された際は、前記位置取得手段により取得された現在位置に対応した地図画像と前記方位検出部により検出された方位とを重ねて前記表示部に表示させ、前記第1の姿勢とは異なる第2の姿勢が検出された際は、前記撮像部により撮影された撮影画像と前記方位検出部により検出された方位とを重ねて前記表示部に表示させる画像表示制御手段と、
を備えていることを特徴とする請求項3に記載の撮影装置。
<請求項5>
前記種類の異なる画像は、前記地図画像及び前記撮影画像以外に天空の星景色画像を含むことを特徴とする請求項2に記載の撮影装置。
<請求項6>
前記画像表示制御手段は、前記姿勢検出手段により異なる姿勢のうち、第1の姿勢および第2の姿勢とは異なる第3の姿勢が検出された際は、前記位置取得手段により取得された現在位置に対応した前記天空の星景色画像と前記方位検出部により検出された方位とを重ねて前記表示部に表示させる天空画像表示制御手段を備えていることを特徴とする請求項4に記載の撮影装置。
<請求項7>
前記画像表示制御手段は、前記方位に関連させて、景勝地の位置を示す景勝地マークを表示させるマーク表示制御手段を備えていることを特徴とする請求項4に記載の撮影装置。
<請求項8>
前記画像表示制御手段は、前記方位に関連させて、撮影ポイントの位置を示す撮影ポイントマークを当該撮影ポイントで既に撮影されている写真と共に表示させる写真表示制御手段を備えていることを特徴とする請求項4に記載の撮影装置。
<請求項9>
撮影装置本体、表示部、撮像部及び方位検出部を備えている撮影装置に用いられる撮影制御方法において、
前記撮影装置本体の姿勢を検出する姿勢検出ステップと、
この姿勢検出ステップにより異なる姿勢が検出された際、当該異なる姿勢に応じて、前記方位検出部により検出された方位を互いに異なる表示形態で前記表示部に表示させる表示制御ステップと、
を備えていることを特徴とする撮影制御方法。
<請求項10>
撮影装置本体、表示部、撮像部及び方位検出部を備えている撮影装置のコンピュータを、
前記撮影装置本体の姿勢を検出する姿勢検出手段と、
この姿勢検出手段により異なる姿勢が検出された際、当該異なる姿勢に応じて、前記方位検出部により検出された方位を互いに異なる表示形態で前記表示部に表示させる表示制御手段と、
して機能させることを特徴とするプログラム。
4 表示部
10 CPU
13 GPS受信アンテナ
14 GPS受信部
16 3軸加速度センサ
17 3軸地磁気センサ
18 表示装置
21 撮像装置
Claims (18)
- 表示部、撮像部及び方位検出部を備えている撮影装置において、
前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御手段と、
前記撮影装置の姿勢を検出する姿勢検出手段と、
を備え、
前記方位表示制御手段は、前記姿勢検出手段により横向きの姿勢が検出された際は、前記撮像部により撮影された撮影画像を前記表示部に表示させるとともに、当該撮影画像に対して俯瞰によって形成された線分であって、当該撮影画像内の所定位置からの線分の方向で前記方位検出部により検出された方位を識別する表示情報を当該撮影画像に重ねて前記表示部に表示させる、
ことを特徴とする撮影装置。 - 前記方位表示制御手段は、前記姿勢検出手段により横向きの姿勢が検出された際は、前記撮像部により撮影された撮影画像を前記表示部に表示させるとともに、当該撮影画像に対して俯瞰によって形成された線分であって、当該撮影画像の下端の現在地に対応する位置からの線分の方向で前記方位検出部により検出された方位を識別する表示情報を当該撮影画像に重ねて前記表示部に表示させることを特徴とする請求項1に記載の撮影装置。
- 表示部、撮像部及び方位検出部を備えている撮影装置において、
前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御手段と、
前記撮影装置の姿勢を検出する姿勢検出手段と、
を備え、
前記方位表示制御手段は、前記姿勢検出手段により下向きの姿勢が検出された際は、現在位置に対応した地図画像を前記表示部に表示するとともに、当該地図画像内の所定位置からの線分の方向で前記方位検出部により検出された方位を識別する表示情報を当該地図画像に重ねて前記表示部に表示させる、
ことを特徴とする撮影装置。 - 前記撮影装置本体の現在位置を取得する位置取得手段をさらに備え、
前記方位表示制御手段は、前記姿勢検出手段により下向きの姿勢が検出された際は、前記位置取得手段により取得された現在位置に対応した地図画像を前記表示部に表示するとともに、当該地図画像内の現在地に対応する所定位置からの線分の方向で前記方位検出部により検出された方位を識別する表示情報を当該地図画像に重ねて前記表示部に表示させることを特徴とする請求項3に記載の撮影装置。 - 前記撮影装置本体の現在位置を取得する位置取得手段をさらに備え、
前記方位表示制御手段は、前記姿勢検出手段により下向きの姿勢が検出された際は、前記位置取得手段により取得された現在位置に対応した地図画像と前記方位検出部により検出された方位を示す表示情報とを重ねて前記表示部に表示させ、前記姿勢検出手段により横向きの姿勢が検出された際は、前記撮像部により撮影された撮影画像と前記方位検出部により検出された方位を示す表示情報とを重ねて前記表示部に表示させる
ことを特徴とする請求項1に記載の撮影装置。 - 前記方位表示制御手段は、前記姿勢検出手段により下向きの姿勢が検出された際は、前記地図画像の中央の現在地に対応する位置からの線分の方向で前記方位検出部により検出された方位を識別する表示形態を採用し、前記姿勢検出手段により横向きの姿勢が検出された際は、前記撮影画像に対して俯瞰によって形成された線分であって、前記撮影画像の下端の現在地に対応する位置からの線分の方向で前記方位検出部により検出された方位を識別する表示形態を採用することを特徴とする請求項5に記載の撮影装置。
- 前記方位表示制御手段は、前記姿勢検出手段により下向きの姿勢が検出された際は、前記地図画像の中央の現在地に対する等距離線を円状の線分で表示し、前記姿勢検出手段により横向きの姿勢が検出された際は、前記撮影画像の下端の現在地に対する等距離線を弧状の線分で表示することを特徴とする請求項6に記載の撮影装置。
- 表示部、撮像部及び方位検出部を備えている撮影装置において、
前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御手段と、
前記撮影装置の姿勢を検出する姿勢検出手段と、
前記方位を示す表示情報に対して所定画像を重ねて前記表示部に表示させる画像表示制御手段と、
を備え、
前記画像表示制御手段は、前記姿勢検出手段により検出される姿勢の違いに応じて、前記方位を示す表示情報に重ねて表示する前記所定画像の種類を、現在位置に対応した地図画像と前記撮像部により撮影された撮影画像と天空の星景色画像とを含む複数の種類の中から選択することを特徴とする撮影装置。 - 前記方位表示制御手段は、前記姿勢検出手段により上向きの姿勢が検出された際は、前記位置取得手段により取得された現在位置に対応した天空の星景色画像と前記方位検出部により検出された方位を示す表示情報とを重ねて前記表示部に表示させる
ことを特徴とする請求項4乃至7のいずれか一項に記載の撮影装置。 - 前記方位に関連させて、景勝地の位置を示す景勝地マークを表示させるマーク表示制御手段を備えていることを特徴とする請求項4乃至7のいずれか一項に記載の撮影装置。
- 前記方位に関連させて、撮影ポイントの位置を示す撮影ポイントマークを当該撮影ポイントで既に撮影されている写真と共に表示させる写真表示制御手段を備えていることを特徴とする請求項4乃至7のいずれか一項に記載の撮影装置。
- 前記姿勢検出手段は、鉛直方向に対する前記撮像部の撮像方向が横向きか下向きかを検出することを特徴とする請求項1乃至11のいずれか一項に記載の撮影装置。
- 表示部、撮像部及び方位検出部を備えている撮影装置に用いられる撮影制御方法において、
前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御処理と、
前記撮影装置の姿勢を検出する姿勢検出処理と、
を含み、
前記方位表示制御処理は、前記姿勢検出処理により横向きの姿勢が検出された際は、前記撮像部により撮影された撮影画像を前記表示部に表示させるとともに、当該撮影画像に対して俯瞰によって形成された線分であって、当該撮影画像内の所定位置からの線分の方向で前記方位検出部により検出された方位を識別する表示情報を当該撮影画像に重ねて前記表示部に表示させる、
ことを特徴とする撮影制御方法。 - 表示部、撮像部及び方位検出部を備えている撮影装置のコンピュータを、
前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御手段と、
前記撮影装置の姿勢を検出する姿勢検出手段と、
として機能させ、
前記方位表示制御手段は、前記姿勢検出手段により横向きの姿勢が検出された際は、前記撮像部により撮影された撮影画像を前記表示部に表示させるとともに、当該撮影画像に対して俯瞰によって形成された線分であって、当該撮影画像内の所定位置からの線分の方向で前記方位検出部により検出された方位を識別する表示情報を当該撮影画像に重ねて前記表示部に表示させる、
ことを特徴とするプログラム。 - 表示部、撮像部及び方位検出部を備えている撮影装置に用いられる撮影制御方法において、
前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御処理と、
前記撮影装置の姿勢を検出する姿勢検出処理と、
を含み、
前記方位表示制御処理は、前記姿勢検出処理により下向きの姿勢が検出された際は、現在位置に対応した地図画像を前記表示部に表示するとともに、当該地図画像内の所定位置からの線分の方向で前記方位検出部により検出された方位を識別する表示情報を当該地図画像に重ねて前記表示部に表示させる、
ことを特徴とする撮影制御方法。 - 表示部、撮像部及び方位検出部を備えている撮影装置のコンピュータを、
前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御手段と、
前記撮影装置の姿勢を検出する姿勢検出手段と、
として機能させ、
前記方位表示制御手段は、前記姿勢検出手段により下向きの姿勢が検出された際は、現在位置に対応した地図画像を前記表示部に表示するとともに、当該地図画像内の所定位置からの線分の方向で前記方位検出部により検出された方位を識別する表示情報を当該地図画像に重ねて前記表示部に表示させる、
ことを特徴とするプログラム。 - 表示部、撮像部及び方位検出部を備えている撮影装置に用いられる撮影制御方法において、
前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御処理と、
前記撮影装置の姿勢を検出する姿勢検出処理と、
前記方位を示す表示情報に対して所定画像を重ねて前記表示部に表示させる画像表示制御処理と、
を含み、
前記画像表示制御処理は、前記姿勢検出処理により検出される姿勢の違いに応じて、前記方位を示す表示情報に重ねて表示する前記所定画像の種類を、現在位置に対応した地図画像と前記撮像部により撮影された撮影画像と天空の星景色画像とを含む複数の種類の中から選択する、
ことを特徴とする撮影制御方法。 - 表示部、撮像部及び方位検出部を備えている撮影装置のコンピュータを、
前記方位検出部により検出された方位を前記表示部に表示させる方位表示制御手段と、
前記撮影装置の姿勢を検出する姿勢検出手段と、
前記方位を示す表示情報に対して所定画像を重ねて前記表示部に表示させる画像表示制御手段と、
として機能させ、
前記画像表示制御手段は、前記姿勢検出手段により検出される姿勢の違いに応じて、前記方位を示す表示情報に重ねて表示する前記所定画像の種類を、現在位置に対応した地図画像と前記撮像部により撮影された撮影画像と天空の星景色画像とを含む複数の種類の中から選択する、
ことを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012043242A JP6010925B2 (ja) | 2012-02-29 | 2012-02-29 | 撮影装置、撮影制御方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012043242A JP6010925B2 (ja) | 2012-02-29 | 2012-02-29 | 撮影装置、撮影制御方法及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013179544A JP2013179544A (ja) | 2013-09-09 |
| JP2013179544A5 JP2013179544A5 (ja) | 2015-03-26 |
| JP6010925B2 true JP6010925B2 (ja) | 2016-10-19 |
Family
ID=49270801
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012043242A Expired - Fee Related JP6010925B2 (ja) | 2012-02-29 | 2012-02-29 | 撮影装置、撮影制御方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6010925B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104199640B (zh) * | 2014-05-27 | 2017-05-10 | 小米科技有限责任公司 | 方向测量方法、装置及终端 |
| JP6970624B2 (ja) | 2018-02-13 | 2021-11-24 | 東京エレクトロン株式会社 | 成膜システム及び基板上に膜を形成する方法 |
| JP7068966B2 (ja) * | 2018-08-20 | 2022-05-17 | ヤフー株式会社 | 表示制御プログラム、表示制御方法および端末装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000305452A (ja) * | 1999-04-21 | 2000-11-02 | Sony Corp | 電子地図装置および電子地図の表示方法 |
| JP2001188014A (ja) * | 1999-12-28 | 2001-07-10 | Sony Corp | 地理ガイド設定装置、地理ガイド利用装置、地理ガイドシステム及び記録媒体 |
| JP2003110902A (ja) * | 2001-09-27 | 2003-04-11 | Fuji Photo Film Co Ltd | 画像撮影装置および方法並びにプログラム |
| JP2006105640A (ja) * | 2004-10-01 | 2006-04-20 | Hitachi Ltd | ナビゲーション装置 |
| JP4264099B2 (ja) * | 2006-09-26 | 2009-05-13 | Sky株式会社 | カメラ付き携帯機器 |
| JP5402612B2 (ja) * | 2009-12-22 | 2014-01-29 | ソニー株式会社 | 表示装置、表示方法及びプログラム |
| JP2011175031A (ja) * | 2010-02-23 | 2011-09-08 | Seiko Epson Corp | 画像形成装置 |
| JP2013038734A (ja) * | 2011-08-11 | 2013-02-21 | Nikon Corp | 画像記録装置 |
-
2012
- 2012-02-29 JP JP2012043242A patent/JP6010925B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013179544A (ja) | 2013-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9080881B2 (en) | Methods and apparatus for providing navigational information associated with locations of objects | |
| KR101285360B1 (ko) | 증강현실을 이용한 관심 지점 표시 장치 및 방법 | |
| JP5682060B2 (ja) | 画像合成装置、画像合成プログラム、及び画像合成システム | |
| JP2007017406A (ja) | 地理データ収集装置 | |
| US20230243979A1 (en) | Methods for geospatial positioning and portable positioning devices thereof | |
| CN102575933A (zh) | 地图图像综合数据库生成系统以及地图图像综合数据库生成程序 | |
| KR100968837B1 (ko) | 촬영된 객체에 대한 정보를 제공하는 휴대용 카메라 시스템 | |
| KR20170094030A (ko) | 실내 내비게이션 및 파노라마 사진 맵핑 제공 시스템 및 그 방법 | |
| KR101574636B1 (ko) | 면형방식 디지털 항공카메라로 촬영한 시계열 항공사진을 입체시하여 좌표를 연동하고 변화지역을 판독하는 시스템 | |
| JP6010925B2 (ja) | 撮影装置、撮影制御方法及びプログラム | |
| EP2710333B1 (en) | Method for remotely determining an absolute azimuth of a target point | |
| JP2005091298A (ja) | 画像処理を用いたグローバル座標取得装置 | |
| US20120026324A1 (en) | Image capturing terminal, data processing terminal, image capturing method, and data processing method | |
| WO2018214401A1 (zh) | 移动平台、飞行体、支持装置、便携式终端、摄像辅助方法、程序以及记录介质 | |
| JP2013024686A (ja) | モバイルマッピングシステム、及びこれを用いた沿道対象物の計測方法と、位置特定プログラム | |
| JP2009036726A (ja) | 探索経路表示方法及び探索経路表示システム | |
| JP2013205419A (ja) | 携帯型撮影装置 | |
| Verhoeven et al. | Positioning in time and space: Cost-effective exterior orientation for airborne archaeological photographs | |
| JP5817012B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| JP6329219B2 (ja) | 操作端末、及び移動体 | |
| US8903163B2 (en) | Using gravity measurements within a photogrammetric adjustment | |
| JP2012244562A (ja) | デジタルカメラ | |
| JP6680499B2 (ja) | 経路案内装置、経路案内システム、経路案内方法、および経路案内プログラム | |
| JP2022140903A (ja) | 測量デバイスおよびこれを用いた測量方法 | |
| JP2013093788A (ja) | 撮像装置、撮像方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150206 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160705 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160802 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160823 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160905 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6010925 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |