以下、本発明に係る実施形態を図面に基づいて説明する。図1は本実施形態に係る眼科撮影装置の構成について説明する概略構成図である。なお、本実施形態においては、被検者眼(眼E)の軸方向をZ方向、水平方向をX方向、鉛直方向をY方向として説明する。眼底の表面方向をXY方向として考えても良い。
<概要>
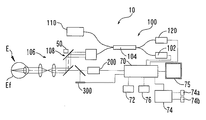
本発明の実施形態に係る眼科撮影装置の概要について説明する。本実施形態に関わる眼科撮影装置(光コヒーレンストモグラフィーデバイス)10は、干渉光学系100、観察光学系200、表示手段(モニタ)75、操作入力手段(操作部)74、制御部(CPU)70、を備える。
干渉光学系100は、走査手段(光スキャナ)108、検出器120を有し、被検眼の断層画像を得る。光スキャナ108は、光源102から発せられた光を被検眼上で二次元的に走査する。検出器120は、光源から発せられた測定光と参照光との干渉状態を検出する。
観察光学系200は、被検眼の動画の正面画像を取得するために用いられる。観察光学系200としては、被検眼に赤外光を照射し、被検眼からの反射光を受光する受光素子を有し、受光素子からの受光信号に基づいて被検眼の正面画像を得るものが挙げられる。例えば、SLOや眼底カメラが挙げられる。また、観察光学系200として干渉光学系100が用いられてもよい。この場合、干渉光学系100によって取得された三次元画像に基づいて、被検眼正面画像が取得される。
なお、観察光学系200がSLOや眼底カメラの場合、制御部70は、観察光学系200によって取得された正面画像と、干渉光学系100によって取得された正面画像(例えば、三次元画像データに基づくOCT正面画像(例えば、積算画像))との位置合わせ(マッチング)する。これにより、干渉光学系100によって取得された断層画像と、正面像観察光学系200によって取得された正面画像との対応付けが行われる。
操作部74は、検者によって操作される。操作部74には、例えば、マウス74a、トラックボール、タッチパネルなどのユーザーインターフェースが用いられる。
モニタ75は、観察光学系200によって取得される正面画像を表示するために用いられる。モニタ75には、例えば、PCに設けられたディスプレイ、眼科撮影装置に設けられたディスプレイが用いられる。モニタ75は、タッチパネルであってもよい。なお、モニタ75がタッチパネルである場合に、モニタ75が操作部として機能する。
制御部70は、モニタ75上に観察光学系200によって取得される正面画像20を表示する。例えば、モニタ75には、随時、観察光学系200によって取得される正面画像20が動画として表示される。
<走査位置設定>
断層画像を取得する部位を選択する場合、観察光学系200によって取得された正面画像20上で行う。
制御部70は、観察光学系200によって取得された正面画像を動状態にてモニタ75に表示する一方、正面画像を静止状態にてモニタ75に表示すると共に、断層画像の取得位置を静止状態にて表示された正面画像上で設定可能とする。
例えば、静止状態の正面画像ととしては、静止画像が挙げられる。動状態の正面画像とは、ライブ動画像が挙げられる。制御部70は、観察光学系200によって取得された正面画像を動画像としてモニタ75に表示する一方、観察光学系200によって取得された正面画像を静止画像として取り込むことによって静止画像をモニタ75に表示すると共に、断層画像の取得位置を静止画像上で設定可能とする。
例えば、検者によって、操作部74が操作されると、制御部70は、操作部74から入力される操作信号に基づいてモニタ75に表示された動画像を静止画像に切り換えると共に、操作部74から入力される操作信号に基づいて断層画像の取得位置を静止画像上で設定可能とする。そして、検者は、静止画像上において、操作部74を操作し、所定領域を指定する。このとき、例えば、制御部70は、断層画像の取得位置を示す指標を静止画像上に重畳して表示すると共に、操作部74から入力される操作信号に基づいて静止画像上で指標を移動させ、測定光の走査位置を設定可能とする。
検者によって所定領域が指定されると、操作部74から操作信号に基づいて、制御部70は、静止画像上で指定(設定)された所定領域(取得位置)を光スキャナ108による測定光の走査位置として設定する。
そして、制御部70は、静止画像上での設定が完了されると、モニタ75に表示された静止画像をライブ動画像に切り換える。
操作部74の操作としては、例えば、モニタ75に表示された動画像と静止画像との切り換えを行う場合、検者は、マウス74aのドラック操作やクリック操作等によって、動画像と静止画像を変更する。
例えば、走査位置を指定する場合、例えば、制御部70は、操作部74から入力される操作信号に基づいて、正面画像上で移動可能なポインタ(例えば、十字マーク、ドットマーク、ペンマーク等)をモニタ75上に表示する。そして、ポインタを移動させることによって正面画像上で指標(走査位置)を移動させ、測定光の走査位置を設定する。
このとき、例えば、検者は、マウス74aのドラッグ操作によって、モニタ75に表示される正面画像が静止画像となっている状態においては、マウス74aのドラック操作をやめることによって、走査位置を指定することが挙げられる。マウス74aのドラック操作をやめた際に、モニタ75上における正面画像上の指標が位置する領域が走査位置として設定される。また、マウス74aのクリック操作によって、モニタ75に表示される正面画像が静止画像となっている状態においては、クリック操作で走査位置を指定してもよい。もちろん、ドラック操作とクリック操作を組み合わせるようにしてもよい。
<トラッキング制御>
走査位置が指定されると、制御部70は、静止画像上で設定された取得位置での断層像が取得されるように光スキャナ108を制御する。そして、制御部70は、観察光学系200によって取得されるライブ動画像に基づいて光スキャナ108の駆動を制御し、静止画像上で設定された被検眼上の取得位置に測定光をトラッキングする。
例えば、走査位置が指定されると、制御部70は、メモリ72に、走査位置を設定した際の正面画像と走査位置の走査位置情報とを記憶させる。走査位置が指定されるとともに、モニタ75に表示された静止画像をライブ動画像に切り換えられる。
制御部70は、観察光学系200によって取得されるライブ動画像と、取得位置の設定に用いた静止画像との位置ずれを画像処理により検出し、検出結果に基づいて光スキャナ108の駆動を制御し、走査位置を補正する。
例えば、位置ずれとしては、位置ずれ方向、回転ずれ、位置ずれ量が挙げられる。制御部70は、動画像上で、メモリ72に記憶された正面画像と現在の正面画像とを比較して、正面画像間における位置ずれを画像処理により検出する。
制御部70は、検出した検出結果に基づいて、光スキャナ108の駆動を制御し、走査位置の補正を行う。制御部70は、走査位置の補正を逐次行っていく。すなわち、制御部70は、設定された走査位置の断層画像が取得されるように、トラッキング動作を行う。
このとき、例えば、制御部70は、光スキャナ108の駆動制御によって走査位置を補正した場合、補正された走査位置に対応する位置に指標の表示位置を変化させる。
このように、走査位置を設定する際にのみ、動画が静止状態に切り換えられ、静止状態の正面画像上において、走査位置の設定を行うことができるため、検者の所望する部位に対して、走査位置を正確に、かつ、容易に設定できる。
なお、上記において、静止状態の画像として、静止画像を用いたがこれに限定されない。例えば、制御部70は、観察光学系200によって取得されるライブ動画像と、予め取得された基準画像との位置ずれを検出し、その検出結果に基づいてモニタ75上でのライブ動画像の表示位置を補正することによって、ライブ動画像を静止状態の正面画像としてモニタ75に表示するようにしてもよい。この場合、トラッキングに用いる画像としては、例えば、基準画像が用いられる。
<乳頭トラッキング制御>
なお、撮影を行う特徴部位に応じて予め、走査を開始する初期位置が設定され、その後、走査位置の補正が行われる構成としてもよい。
制御部70は、予め取得された断層画像又は正面画像を処理して被検眼のある特徴部位を画像処理により検出する。制御部70は、検出された特徴部位の位置に基づいて、断層画像の取得位置を正面画像上に設定する。制御部70は、観察光学系200によって取得されるライブ動画像と、断層画像の取得位置が設定された正面画像との位置ずれを画像処理により検出し、検出結果に基づいて光スキャナ108の駆動を制御し、特徴部位に対する走査位置を補正する。なお、光スキャナ108の走査位置と正面画像との対応関係は予め定められている。
例えば、制御部70は、断層画像の取得位置が設定された正面画像を基準画像として設定し、基準画像と初期位置の走査位置情報とをメモリ72に記憶させる。制御部70は、メモリ72に記憶された基準画像と観察光学系200によって取得される現在の正面画像とを比較して、基準画像に対する現在の正面画像の位置ずれを画像処理により検出する。そして、制御部70は、位置ずれに基づいて、光スキャナ108の駆動を制御し、走査位置の補正を行う。
例えば、特徴部位としては、視神経乳頭、黄斑、病変部等が挙げられる。
視神経乳頭の場合、制御部70は、断層画像又は正面画像から視神経乳頭を検出し、検出された視神経乳頭の位置に基づいて断層画像の取得位置を正面画像上に設定する。制御部70は、観察光学系200によって取得されるライブ動画像と断層画像の取得位置が設定された正面画像との位置ずれを画像処理により検出し、検出結果に基づいて光スキャナ108の駆動を制御し、視神経乳頭に対する走査位置を補正する。
例えば、断層画像の取得位置の設定は、制御部70は、検出された視神経乳頭の位置に基づいて視神経乳頭の中心部から所定距離離れたサークル状の領域を断層画像の取得位置として設定することが挙げられる。
黄斑の場合、制御部70は、断層画像又は正面画像から黄斑を検出し、検出された黄斑の位置に基づいて断層画像の取得位置を正面画像上に設定する。制御部70は、観察光学系200によって取得されるライブ動画像と断層画像の取得位置が設定された正面画像との位置ずれを画像処理により検出し、検出結果に基づいて光スキャナ108の駆動を制御し、黄斑に対する走査位置を補正する。
なお、例えば、上記特徴部位の検出は、エッジ検出、ハフ変換、等のアルゴリズムを用いて行うことが挙げられる。また、特徴部位の検出は、特徴部位がもつ輝度変化、形状、サイズ等の特異的な部分を画像処理によって画像から抽出することによって行われる。
これによって、走査位置の補正を行う際に、走査位置補正の度に、特徴部位の検出を行う必要がないため、迅速に走査位置の補正を行うことができる。また、特徴部位の誤検知による位置ずれ量検出の誤検出の可能性を低減することができる。このため精度良く走査位置の補正を行うことができる。また、大きく撮影範囲が変更され、特徴部分が検出できなくなった場合であっても、走査位置の補正を高確率で成功させることができる。
<撮影設定変更技術>
正面画像間の位置ずれが検出され、光スキャナ108の駆動制御による走査位置の補正中において、検者は、操作部74を操作することによって、撮影時の撮影設定(撮影条件)を変更することができる。例えば、撮影設定として、測定光の走査動作に関する走査設定(走査条件)を変更する
制御部70は、モニタ75に表示された正面画像上で断層画像の取得位置を予め設定すると共に、設定された取得位置にて断層画像を取得する際の測定光の走査条件を設定可能とする。
制御部70は、観察光学系200によって取得されるライブ動画像に基づいて光スキャナ108の駆動を制御し、設定された被検眼上の取得位置に第1の走査条件にて測定光をトラッキングする。制御部70は、第1の走査条件でトラッキングが実行された後、測定光の走査条件が変更されると、第1の走査条件にてトラッキングを行う際に制御部70によって予め設定された被検眼上の取得位置に第1の走査条件とは異なる第2の走査条件にて測定光をトラッキングする。
例えば、第1の走査条件で測定光のトラッキングを行う場合、制御部70は、観察光学系200によって取得されるライブ動画像と予め取得された静止画像との位置ずれを画像処理により検出し、検出結果に基づいて光スキャナ108の駆動を制御する。また、制御部70は、第1の走査条件でトラッキングが実行された後、測定光の走査条件が変更された際、観察光学系200によって取得されるライブ動画像と第1の走査条件でのトラッキングに用いた静止画像との位置ずれを画像処理により検出する。そして、制御部70は、検出結果に基づいて光スキャナ108の駆動を制御し、第2の走査条件にて測定光のトラッキングを行う。
例えば、走査条件として、走査パターン、走査ライン数、走査パターンの回転角度、走査幅の少なくともいずれかを設定可能(変更可能)である。
例えば、走査パターン変更する場合、制御部70は、走査パターンに基づいて走査パターンを示す指標を正面画像上に重畳してモニタ75に表示させ、走査パターンの変更に応じて、指標の表示パターンを変更する。例えば、指標は、測定光の走査位置を示す指標であって、制御部70は、光スキャナ108の駆動制御によって走査位置が補正された場合、補正された走査位置に対応する位置に指標の表示位置を変化させる。
このように、トラキングの作動中において、走査条件が変更可能であるため、同一部位において、走査条件を変更した際に、再度、走査位置を調整しなくてよいため、同一部位における断層画像を様々なパターンにて容易に取得でき、手間とならない。また、異なる部位の走査位置を設定しまうことを回避することができ、精度良く走査を行うことができる。また、撮影部位に応じた走査パターンに変更できるため、利便性が高い。
なお、特定部位に応じて、測定光の走査を開始する始点又は測定光の走査を終了する終点の少なくとも一方の数又は位置を変更するような構成としてもよい。例えば、制御部70は、観察光学系200によって取得された正面画像から特定部位の位置を検出し、特定部位に応じて測定光の走査パターンを設定する。
<断層画像の撮影>
走査位置が設定されると、撮影が行われる。検者によって、操作部74が操作されると、制御部70は、操作部74からの操作信号に基づいて、干渉光学系100によって取得される断層画像を取り込み、メモリ72に記憶させる。
例えば、制御部70は、操作部74からの操作信号が入力された後、ライブ動画像と特徴部位の検出に用いた正面画像との位置ずれが所定の許容範囲を満たすか否かを判定し、その判定結果を用いて断層画像を取り込み、メモリ72に記憶させる。
例えば、メモリ72への断層画像の記憶は、逐次断層画像が取得される度に判定を行い、メモリ72へ記憶させるか否かの処理を行うようにしてもよい。また、逐次断層画像が取得される度に判定を行い、判定結果を断層画像を対応付けして、一旦メモリ72に記憶させる。そして、全ての断層画像をメモリ72に取得した後、断層画像と対応付けされた判定結果を用いて、メモリ72に記憶させておく断層画像を選別してもよい。
なお、制御部70は、ずれ量が所定の許容範囲を満たさないと判定したとき、制御部70は、ライブ動画像と特徴部位の検出に用いた正面画像との位置ずれが所定の許容範囲を満たすように光スキャナ108の駆動を制御し、走査位置の補正を行う。そして、制御部70は、前記位置ずれが所定の許容範囲を満たしたときの断層画像を取り込み、メモリ72に記憶させる。
これによって、走査位置設定後、画像の取得を行うまでに走査位置がずれてしまった場合であっても、設定した走査位置の断層画像を精度良く取得することができる。また、異なる位置を測定してしまう可能性が軽減される。
<実施例>
以下、本実施形態に係る実施例を図面に基づいて説明する。図1は本実施例に係る眼科撮影装置の構成について説明する概略構成図である。以下の説明においては、眼科撮影装置として、被検眼の眼底撮影を行う眼底撮影装置を例に挙げて説明を行う。もちろん、眼科撮影装置としては、眼底撮影装置に限定されず、被検眼の前眼部撮影を行う前眼部撮影装置等が挙げられる。
装置構成の概略を説明する。本装置は、被検者眼Eの眼底Efの断層像を撮影するための光コヒーレンストモグラフィーデバイス(OCTデバイス)10である。OCTデバイス10は、干渉光学系(OCT光学系)100と、正面観察光学系200と、固視標投影ユニット300と、演算制御部(CPU)70と、を含む。
OCT光学系100は、眼底に測定光を照射する。OCT光学系100は、眼底から反射された測定光と、参照光との干渉状態を受光素子(検出器120)によって検出する。OCT光学系100は、眼底Ef上の撮像位置を変更するため、眼底Ef上における測定光の照射位置を変更する照射位置変更ユニット(例えば、光スキャナ108、固視標投影ユニット300)を備える。制御部70は、設定された撮像位置情報に基づいて照射位置変更ユニットの動作を制御し、検出器120からの受光信号に基づいて断層像を取得する。
<OCT光学系>
OCT光学系100は、いわゆる眼科用光断層干渉計(OCT:Optical coherence tomography)の装置構成を持ち、眼Eの断層像を撮像する。OCT光学系100は、測定光源102から出射された光をカップラー(光分割器)104によって測定光(試料光)と参照光に分割する。そして、OCT光学系100は、測定光学系106によって測定光を眼Eの眼底Efに導き,また、参照光を参照光学系110に導く。その後、眼底Efによって反射された測定光と,参照光との合成による干渉光を検出器(受光素子)120に受光させる。
検出器120は、測定光と参照光との干渉状態を検出する。フーリエドメインOCTの場合では、干渉光のスペクトル強度が検出器120によって検出され、スペクトル強度データに対するフーリエ変換によって所定範囲における深さプロファイル(Aスキャン信号)が取得される。例えば、Spectral-domain OCT(SD−OCT)、Swept-source OCT(SS−OCT)が挙げられる。また、Time-domain OCT(TD−OCT)であってもよい。
光スキャナ108は、測定光源から発せられた光を被検眼眼底上で走査させる。例えば、光スキャナ108は、眼底上で二次元的(XY方向(横断方向))に測定光を走査させる。光スキャナ108は、瞳孔と略共役な位置に配置される。光スキャナ108は、例えば、2つのガルバノミラーであり、その反射角度が駆動機構50によって任意に調整される。
これにより、光源102から出射された光束はその反射(進行)方向が変化され、眼底上で任意の方向に走査される。これにより、眼底Ef上における撮像位置が変更される。光スキャナ108としては、光を偏向させる構成であればよい。例えば、反射ミラー(ガルバノミラー、ポリゴンミラー、レゾナントスキャナ)の他、光の進行(偏向)方向を変化させる音響光学素子(AOM)等が用いられる。
参照光学系110は、眼底Efでの測定光の反射によって取得される反射光と合成される参照光を生成する。参照光学系110は、マイケルソンタイプであってもよいし、マッハツェンダタイプであっても良い。参照光学系110は、例えば、反射光学系(例えば、参照ミラー)によって形成され、カップラー104からの光を反射光学系により反射することにより再度カップラー104に戻し、検出器120に導く。他の例としては、参照光学系110は、透過光学系(例えば、光ファイバー)によって形成され、カップラー104からの光を戻さず透過させることにより検出器120へと導く。
参照光学系110は、参照光路中の光学部材を移動させることにより、測定光と参照光との光路長差を変更する構成を有する。例えば、参照ミラーが光軸方向に移動される。光路長差を変更するための構成は、測定光学系106の測定光路中に配置されてもよい。
<正面観察光学系>
正面観察光学系(正面像観察デバイス)200は、眼底Efの正面画像を得るために設けられている。観察光学系200は、例えば、光源から発せられた測定光(例えば、赤外光)を眼底上で二次元的に走査させる光スキャナと、眼底と略共役位置に配置された共焦点開口を介して眼底反射光を受光する第2の受光素子と、を備え、いわゆる眼科用走査型レーザ検眼鏡(SLO)の装置構成を持つ。
なお、観察光学系200の構成としては、いわゆる眼底カメラタイプの構成であってもよい。また、OCT光学系100は、観察光学系200を兼用してもよい。すなわち、正面画像は、二次元的に得られた断層像を形成するデータを用いて取得されるようにしてもよい(例えば、三次元断層像の深さ方向への積算画像、XY各位置でのスペクトルデータの積算値、ある一定の深さ方向におけるXY各位置での輝度データ、網膜表層画像、等)。
<固視標投影ユニット>
固視標投影ユニット300は、眼Eの視線方向を誘導するための光学系を有する。投影ユニット300は、眼Eに呈示する固視標を有し、複数の方向に眼Eを誘導できる。
例えば、固視標投影ユニット300は、可視光を発する可視光源を有し、視標の呈示位置を二次元的に変更させる。これにより、視線方向が変更され、結果的に撮像部位が変更される。例えば、撮影光軸と同方向から固視標が呈示されると、眼底の中心部が撮像部位として設定される。また、撮影光軸に対して固視標が上方に呈示されると、眼底の上部が撮像部位として設定される。すなわち、撮影光軸に対する視標の位置に応じて撮影部位が変更される。
固視標投影ユニット300としては、例えば、マトリクス状に配列されたLEDの点灯位置により固視位置を調整する構成、光源からの光を光スキャナを用いて走査させ、光源の点灯制御により固視位置を調整する構成、等、種々の構成が考えられる。また、投影ユニット300は、内部固視灯タイプであってもよいし、外部固視灯タイプであってもよい。
<制御部>
制御部70は、各構成100〜300の各部材など、装置全体を制御する。また、制御部70は、取得された画像を処理する画像処理部、取得された画像を解析する画像解析部、などを兼用する。制御部70は、一般的なCPU(Central Processing Unit)等で実現される。制御部70は、以下に示すように、断層像に基づいて眼底Efを解析する。
制御部70は、OCT光学系100の検出器120から出力される受光信号に基づいて画像処理により断層像を取得すると共に、正面観察光学系200の受光素子から出力される受光信号に基づいて正面像を取得する。また、制御部70は、固視標投影ユニット300を制御して固視位置を変更する。
メモリ(記憶部)72、モニタ75、コントロール部(操作部)74は、それぞれ制御部70と電気的に接続されている。制御部70は、モニタ75の表示画面を制御する。取得された眼底像は、モニタ75に静止画又は動画として出力される他、メモリ72に記憶される。メモリ72は、例えば、撮影された断層像(例えば、三次元断層像)、正面画像、各断層像の撮影位置情報等の撮影に係る各種情報を記録する。制御部70は、コントロール部74から出力される操作信号に基づいて、OCT光学系100、正面観察光学系200、固視標投影ユニット300の各部材を制御する。コントロール部74は、検者によって操作される操作部材としてマウス74a、操作ノブ74b、74cが接続されている。
なお、マウス74aには、検者の手によってマウス74a本体が二次元的に移動されたときの移動信号を検出するセンサと、検者の手によって、検者の手によって押圧されたことを検知するための左右2つのマウスボタンと、左右2つのマウスボタンの間に前後方向に回転可能なホイール機構とが設けられている。
なお、操作ノブ74b、74cは、左右方向に回転可能な構成となっている。
モニタ75は、装置本体に搭載された表示モニタであってもよいし、パーソナルコンピュータの表示モニタであってもよい。また、これらが併用された構成であってもよい。
<制御動作>
以上のような構成を備える装置において、その制御動作について説明する。検者は、固視標投影ユニット300の固視標を注視するように被検者に指示した後、図示無き前眼部観察用カメラで撮影される前眼部観察像をモニタ75で見ながら、被検眼の瞳孔中心に測定光軸がくるように、図示無きジョイスティックを用いて、アライメント操作を行う。
そして、制御部70は、光スキャナ108の駆動を制御し、眼底上で測定光を所定方向に関して走査させ、走査中に検出器120から出力される出力信号から所定の走査領域に対応する受光信号を取得して断層画像を形成する。また、制御部70は、OCT光学系100を制御し、断層画像を取得すると共に、観察光学系200を制御し、眼底正面像を取得する。そして、制御部70は、OCT光学系100によって断層画像、観察光学系200によって眼底正面像を随時取得する。
図2は、モニタ75に表示される表示画面の一例を示す図である。制御部70は、モニタ75上に、観察光学系200によって取得された正面画像20、指標25、断層画像30、を表示する。ライン25は、正面画像20上における断層画像の測定位置(取得位置)を表す指標である。ライン25は、モニタ75上の正面画像上に電気的に表示される。
制御部70は、操作部74からの操作信号に基づいてモニタ75上で随時移動可能なポインタ21(例えば、十字マーク、ドットマーク、ペンマーク等)をモニタ75上に表示する。また、本実施例では、検者がマウス74aを操作して、正面画像20上にポインタ21を合わせた状態で、クリック操作又はドラック操作を行うことによって、撮影条件の設定が可能な構成となっている。この場合、ポインタ21は、モニタ75上における任意の位置を指定するために用いられる。
<スキャンラインの設定>
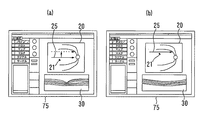
図3は、走査位置の設定について説明する図である。図4は、スキャンライン設定の動作のフローチャートを示している。断層画像及び正面画像が同一画面上に表示されたら、検者は、リアルタイムで観察されるモニタ75上の正面画像から検者の撮影したい断層画像の位置を設定する。ここで、検者は、マウス74aを用いて、ドラッグ操作を行うことによって、正面画像に対してライン25を移動させていき、走査位置を設定する。なお、ライン25がX方向となるように設定すれば、XZ面の断層画像の撮影が行われ、ライン25がY方向となるように設定すれば、YZ面の断層画像の撮影が行われるようになっている。また、ライン25を任意の形状(例えば、斜め方向や丸等)に設定できるようにしてもよい(詳細は後述する)。
検者によってライン25が正面画像20に対して移動されると、制御部70は、随時走査位置の設定を行い、これに対応する走査位置の断層画像を取得する。そして、取得された断層画像を随時モニタ75の表示画面上に表示する。また、制御部70は、マウス74aから出力される操作信号に基づいて測定光の走査位置を変更すると共に、変更された走査位置に対応する表示位置にライン25を表示する。
<静止画での走査位置の設定>
ここで、走査位置の設定方法について説明する。走査位置の設定は、正面画像20の動画又は静止画上で行なわれる。以下に、静止画上で行われる場合について説明する。検者によって、所定の操作が行われると、制御部70は、モニタ75に表示された正面画像20の動画像を静止画像へと切り換える。そして、制御部70は、静止画像上での走査位置の設定を可能とする。
例えば、制御部70は、観察光学系20によって順次取得される正面画像を更新することによりモニタ75上に正面画像20の動画像を表示する。動画像が表示された状態において、正面画像20に対するドラック操作が開始されると、制御部70は、観察光学系20によって取得された正面画像を静止画としてキャプチャー(取込)し、正面画像20の静止画をメモリ72に記憶させる。制御部70は、動画の代わりとして、メモリ72に記憶された正面画像の静止画をモニタ75上に表示する。また、制御部70は、ポインタ21が表示された位置にライン25を移動させる。
検者は、ドラック操作を行った状態で、マウス74aを移動させることにより、正面画像20の静止画上において、ライン25を移動させる(図3(a)参照)。また、制御部70は、所定の操作信号に基づいて、静止画像において走査パターン、走査パターンの回転角度、走査幅(スキャン長)を変更するようにしてもよい。
そして、マウス74aのドラック操作(例えば、マウスボタンの入力が解除される)が解除されると、制御部70は、正面画像20の静止画上においてライン25が位置する部位を、トラッキングを行う走査位置として設定する(図3(b)参照)。制御部70は、静止画上で設定された走査位置情報を正面画像20の静止画と共にメモリ72に記憶させる。
<断層画像の取得>
静止画像上での走査位置の設定が完了されると、制御部70は、モニタに表示される正面画像20を、静止画から動画へと切り換える。制御部70は、モニタ75上に表示された正面画像の静止画を観察光学系200によってリアルタイムで取得される現在の正面画像へと切り換える。そして、観察光学系200によって正面画像が取得される毎に、正面画像を更新していく。
制御部70は、設定された走査位置に基づいてBスキャンによる断層画像の取得を行う。制御部70は、正面画像20上に設定されたライン25の表示位置に基づいて、ライン25の位置に対応する眼底の断層画像が得られるように、光スキャナ108を駆動させて測定光を走査させる。なお、ライン25の表示位置(モニタ上における座標位置)と光スキャナ108による測定光の走査位置との関係は、予め定まっているので、制御部70は、設定したライン25の表示位置に対応する走査範囲に対して測定光が走査されるように、光スキャナ108の2つのガルバノミラーを適宜駆動制御する。
<トラッキング制御>
走査位置の設定後、動画の正面画像が更新される毎に、制御部70は、走査位置の補正を行う。例えば、被検眼の固視微動等によって、正面画像が走査位置に対してずれた場合、走査位置を設定した位置と同一の位置の断層画像を取得するためには、走査位置を補正する必要がある。制御部70は、トラッキング制御を開始する。制御部70は、走査位置が設定されると、メモリ72に記憶された正面画像と走査位置情報を用いて走査位置の補正を行う。
例えば、制御部70は、上記走査位置の設定に用いた正面画像の静止画と、現在の正面画像と、を比較して、正面画像の静止画に対する現在の正面画像の位置ずれ方向及び位置ずれ量を画像処理により検出(演算)する。例えば、制御部70は、走査位置の設定時における正面画像の静止画データを基準画像とし、その基準画像とリアルタイムで取得される正面画像との位置ずれ方向及び位置ずれ量を算出する。これにより、静止画像に対する位置ずれ情報が得られる。
上記のようにして、位置ずれ方向及び位置ずれ量が検出されると、制御部70は、走査位置のずれが補正されるように、光スキャナ108の2つのガルバノミラーを適宜駆動制御する。これによって、走査位置が補正される。また、図5に示すように、制御部70は、走査位置を補正した場合、補正後の走査位置(ライン25')を正面画像上に表示する。以上のようにして、被検眼がずれた場合であっても、走査位置が補正され、常時、走査位置を設定した部位と同一の部位の断層画像が取得される。
ここで、図示なき撮影開始スイッチ(レリーズスイッチ)が入力されると、制御部70は、断層画像の静止画像をキャプチャー(取込)し、メモリ72に記憶させる。また、取得された断層画像の静止画をモニタ75に表示する。
以上のようにすれば、動画像から切り換えられた静止画像を用いて走査位置を設定できるため、検者の所望する部位への走査位置の調整を正確かつ容易に行うことができる。また、静止画像で設定された走査位置に対するトラッキング制御により、所望する部位に対応する断層画像を確実に取得できる。
このような制御は、同一部位に関する複数枚の断層画像を取得して加算平均画像を取得するような場合において、所望する部位の加算平均画像を得るのに特に有利である。
なお、正面画像が静止画として表示されている間、モニタ75上では、逐次、正面画像の走査位置に応じた断層画像が表示されるようにしてもよい。この場合、例えば、正面画像の静止画像上において、ライン25が移動されると、ライン25の位置での断層画像が取得され表示される。例えば、正面画像の静止画に対して、観察光学系200によって取得されている現在の正面画像の位置ずれが検出され、走査位置の補正が行われる。これによって、正面画像の静止画上におけるライン25の位置に対応する断層画像が取得され、表示される。このようにすることによって、ライン25での断層画像を観察しながら走査位置の設定を行うことができるため、検者が所望する部位の断層画像を取得することが容易となる。なお、制御部70は、静止画像上での走査位置の設定中に取得された複数の断層画像を用いて、加算平均画像を取得するようにしてもよい。また、モニタ75上に、取得された加算平均画像をリアルタイムで表示するようにしてもよい。
なお、本実施例において、トラッキング制御の開始のタイミングとしては、走査位置設定後に開始される構成としたがこれに限定されない。走査位置設定後、検者によって、操作部74が操作され、所定のトリガ信号が出力された場合に、トラッキング制御を開始してもよい。例えば、走査位置設定後、検者が正面画像の静止画上でライン25にポインタ21を合わせ、クリック操作を行うことによって、トラッキング制御が開始されてもよい。この場合、クリック操作が行われると、制御部70は、光スキャナ108を制御し、走査位置の補正を開始する。
<トラッキング状態での走査条件の変更>
本実施例において、走査位置設定後、検者は、撮影条件(例えば、走査条件)を変更できる。上記記載のようにして、走査位置が設定されると、制御部70は、正面画像が更新される度に、設定した走査位置と同一部位の断層画像が取得できるように走査位置を補正する。このとき、検者は、操作部74を操作することによって、撮影条件を変更することができる。すなわち、制御部70は、トラッキング制御下において、撮影条件を変更できる。以下、走査条件の変更を例に挙げて撮影条件の変更について説明する。
走査条件の変更としては、スキャン長(スキャンの幅)、スキャンのパターン(走査パターン)、スキャンパターンの回転角度(走査中心を中心としてラインが回転される)、等の変更が挙げられる。
第1の走査条件が設定されると、制御部70は、予め取得された正面画像の静止画と、現在の正面画像と、を比較して、正面画像の静止画に対する現在の正面画像の位置ずれ方向及び位置ずれ量を画像処理により検出(演算)する。なお、ここでの静止画は、上記のようにモニタ75上で動画から切り換えられた静止画に限定されず、あるタイミングで取得された正面画像の静止画も含まれる。
位置ずれ方向及び位置ずれ量が検出されると、制御部70は、第1の走査条件における走査位置のずれが補正されるように、光スキャナ108の2つのガルバノミラーを適宜駆動制御する。これによって、第1の走査条件における走査位置が補正される。また、図5に示すように、制御部70は、走査位置を補正した場合、補正後の走査位置(ライン25')を正面画像上に表示する。ここで、図示なき撮影開始スイッチ(レリーズスイッチ)が入力されると、制御部70は、第1の走査条件での断層画像の静止画像をキャプチャー(取込)し、メモリ72に記憶させる。また、取得された断層画像の静止画をモニタ75に表示する。
上記のような第1の走査条件でのトラッキング下において、走査条件が変更されると、制御部70は、変更された第2の走査条件でのトラッキングを行う。図6は、スキャン長及びスキャン角度の変更について説明する図である。スキャン長やスキャン角度が変更する場合、検者は、操作ノブ74b、74cを操作する。例えば、検者によって、操作ノブ74bが回転されると、制御部70は、光スキャナ108を制御し、スキャン長を変更する。この場合、例えば、操作ノブ74bを右方向に回転させるとスキャン長が大きくなり、左方向に回転させると、スキャン長が小さくなる(図6(a)参照)。
また、検者によって、操作ノブ74cが回転されると、制御部70は、スキャンラインの中心位置を示す走査中心位置を回転中心として、スキャン角度を変更する。この場合、例えば、操作ノブ74cを右方向に回転させると、スキャンラインの走査中心位置を回転中心として、スキャンラインが右方向に回転をし、操作ノブ74cを左方向に回転させると、スキャンラインが左方向に回転をする(図6(b)参照)。これによって、スキャン角度が変更される。なお、スキャン長、スキャン角度の変更は、マウス等の他の操作部を操作することによって、変更される構成であってもよい。
図7は、走査パターンの変更について説明する図である。図7は、走査パターンをラインスキャンからクロススキャンに変更した例を示している。走査パターンを変更する場合、検者は、マウス74aを操作し、モニタ75上に表示されているOCT設定欄60より所望する走査パターンを選択し、走査パターンの変更を行う。OCT設定欄60には、種々の走査パターンが列挙されている。例えば、走査パターンとしては、クロス(十字)スキャン、サークルスキャン、ラスタースキャン、ラジアルスキャン等が考えられる。また、撮影部位(黄斑用スキャン、乳頭用スキャン)に応じたスキャンに変更することも可能である。撮影部位を変更してスキャンを行う場合、制御部70は、固視標投影ユニット300を制御し、所望の部位が撮影可能となるように、眼Eの視線方向を誘導する。
検者によって、マウス74aが操作され、モニタ75上に表示されているOCT設定欄60の内、所定の走査パターンが選択されると、制御部70は、選択された走査パターンへの変更を行う。このとき、予め、走査パターン毎に走査中心位置が設定されており、制御部70は、過去の走査パターンの走査中心位置と選択した走査パターンの走査中心位置が一致するように、走査パターンを変更する。なお、走査位置が変更されない場合、眼底上の同一部位に関する断層像が異なる走査パターンにて取得される。
制御部70は、上記のような走査条件の変更中においても、トラッキング制御を継続する。走査条件が変更されると、制御部70は、例えば、第1の走査条件での走査位置の補正(トラッキング)に用いた正面画像と同じ静止画と、現在の正面画像と、を比較して、正面画像の静止画に対する現在の正面画像の位置ずれを画像処理により検出(演算)する。位置ずれが検出されると、制御部70は、第2の走査条件における走査位置のずれが補正されるように、光スキャナ108の2つのガルバノミラーを適宜駆動制御する。これによって、第2の走査条件における走査位置が補正される。
以上のように、検者は、トラッキング制御が行われている中、走査条件を変更できる。そして、制御部70は、変更された走査条件に基づいて、第1の走査条件にて断層画像の取得を行っていた走査中心と同じ位置となるように走査位置を調整し、断層画像の取得を引き続き行う。すなわち、走査条件が変更された場合であっても、変更前に設定された走査中心を基準とするトラッキング制御を繰り返し行う。
図示なき撮影開始スイッチ(レリーズスイッチ)が入力されると、制御部70は、第2の走査条件での断層画像の静止画像をキャプチャー(取込)し、メモリ72に記憶させる。また、取得された断層画像の静止画をモニタ75に表示する。
このように、トラッキング制御中において、走査の条件が変更可能であるため、走査条件を変更した際に、再度、走査位置を調整しなくてよい。このため、例えば、眼底上の同一部位(例えば、病変部)における断層画像を様々なパターンにて容易に取得でき、手間とならない。また、眼底上の異なる部位の走査位置を設定しまうことを回避することができ、精度良く走査を行うことができる。また、同一部位から走査位置がずれることなく、撮影部位に応じた走査パターンに変更できるため、利便性が高い。
また、上記のように同一の静止画像を用いて走査位置のトラッキングを行うことにより、第1の走査条件と第2の走査条件における眼底に対する位置関係が共通化されるため、後の解析等において有利である。
なお、本実施例においては、走査条件の変更を例として挙げたがこれに限定されない。撮影中の撮影条件を変更するものであれば、適用可能である。例えば、撮影中において、被検者の固視が安定しない場合等に、固視標の条件(例えば、固視標のパターン、固視標の大きさ、固視位置、)を変更するようにしてもよい。この場合、トラッキング制御中に固視標投影ユニット300を制御し、固視標の大きさやパターンを変更することが挙げられる。
<撮影動作(セミオートショット)>
走査位置が設定され、検者によって図無き撮影開始スイッチが押されると、制御部70は、検出される位置ずれに基づいて、撮影を行うか否かの判定を行い、判定結果に応じて断層画像の撮影(取り込み)を制御する。
例えば、制御部70は、逐次検出される位置ずれが所定の許容範囲を満たすと判定したとき、撮影開始(画像取込)のトリガ信号を自動的に発する。そして、トリガ信号が発せられると、制御部70は、トリガ信号が発せられたタイミングで取得された断層画像を静止画としてメモリ72に記憶させる。
また、制御部70は、位置ずれが所定の許容範囲内を超えたと判定したとき、光スキャナ108を駆動制御して再度走査位置の補正を行う。そして、制御部70は、位置ずれ量が所定の許容範囲を満たしたと判定したとき、撮影開始のトリガ信号を自動的に発し、断層画像の撮影を行う。
これによって、走査位置設定後、画像の取得を行うまでに走査位置がずれてしまった場合であっても、設定した走査位置の断層画像を精度良く取得することができる。また、異なる位置を測定してしまう可能性が軽減される。
<変容例>
以下、本実施例に関わる変容例について説明する。変容例では、被検眼の特徴部位において撮影を行う場合を例として説明する。なお、以下の説明においては、特徴部位として視神経乳頭部位(乳頭)において、撮影を行う場合を例として説明する。
<自動乳頭検出>
制御部70は、観察光学系200を制御し、乳頭を含んだ正面画像を取得する。制御部70は、取得した正面画像より乳頭の検出を行う。
正面画像において、乳頭は、他の眼底部位にはない輝度変化(明/暗)で現れる。制御部70は、所定レベルより輝度レベルが低い部位、又は所定レベルより高い部位を画像処理により検出し、乳頭の特定を行う。乳頭の特定は、例えば、輝度変化からエッジ検出を行い、乳頭の外縁部を検出することによって行う。
制御部70は、正面画像における乳頭を検出するとともに、検出された乳頭の中心位置を算出する。例えば、乳頭の中心座標の算出は、乳頭の外縁部を円近似し、近似円の中心座標を検出する。そして、検出した近似円の中心座標が乳頭の中心座標として扱われる。
<乳頭検出位置の手動変更>
乳頭検出後、制御部70は、走査位置の初期位置を設定する。制御部は、乳頭の中心位置と走査中心位置とが一致するような走査位置を初期位置として設定する。制御部70は、乳頭検出に用いた正面画像の静止画と、その正面画像上で設定された走査位置情報をメモリ72に記憶させる。
初期位置が設定されると、制御部70は、初期位置での断層画像を取得し、モニタ75上に正面画像とともに表示する。また、初期位置の設定後、動画の正面画像が更新される毎に、制御部70は、走査位置の補正を行う。すなわち、制御部70は、トラッキング制御を開始する。制御部70は、走査位置が設定されると、メモリ72に記憶された正面画像と走査位置情報を用いて走査位置の補正を行う。
走査位置の補正について説明する。制御部70は、まず、メモリ72に記憶された乳頭検出に用いた正面画像と現在の正面画像とを比較する。制御部70は、乳頭検出に用いた正面画像に対する現在の正面画像の位置ずれ方向及び位置ずれ量を画像処理により検出(演算)する。
制御部70は、乳頭検出に用いた正面画像データを基準画像とし、その基準画像とリアルタイムで取得される正面画像との位置ずれを算出する。これにより、乳頭検出に用いた正面画像に対する位置ずれ情報が得られる。
上記のようにして、位置ずれが検出されると、制御部70は、乳頭に対する走査位置の位置ずれが補正されるように、光スキャナ108の2つのガルバノミラーを適宜駆動制御する。これによって、走査位置が補正される。
このように、特徴部分(例えば、乳頭)の位置が画像処理により予め検出された正面画像と、後に取得される正面画像との相対的な位置ずれを用いて走査位置を補正することにより、正面画像の取得の度に特徴部分を検出する必要がないため、迅速に走査位置の補正を行うことができる。
また、特徴部分の誤検知による位置ずれの誤検出の可能性を低減できる。このため、精度良く走査位置の補正を行うことができる。また、眼底像が大きく動いて、特徴部分の一部が検出できなくなった場合であっても、走査位置の補正を高確率で成功させることができる。
なお、特徴部位に対する走査位置を検者が修正したい場合、上記で記載のように、制御部70は、検者からの操作信号に応じて、モニタ75上の正面画像の動画を静止画に切り換え、静止画上において特徴部位に対する走査位置を設定するようにしてもよい(<静止画での走査位置の設定>、<断層画像の取得>、<トラッキング制御>参照。)すなわち、静止画での走査位置の設定に基づくトラッキング制御と、特徴部位の検出に基づくトラッキング制御は、その併用が可能である。例えば、特徴部位の検出結果にずれが生じた状態が観察画像から確認された場合、検者は、正面画像を静止画へと切り換えて、特徴部位に対する走査位置を修正する。その後、修正された走査位置と静止画を用いてトラッキング制御が行われる。
なお、本変容例においても、上記で記載したように、トラッキング制御中に撮影条件を変更することも可能である。
<位置ずれ検出手法>
なお、2つの画像間の位置ずれを検出する手法としては、種々の画像処理手法(各種相関関数を用いる方法、フーリエ変換を利用する方法、特徴点のマッチングに基づく方法)を用いることが可能である。
例えば、所定の基準画像(例えば、過去の正面画像)又は対象画像(現在の正面画像)を1画素ずつ位置ずれさせ、基準画像と対象画像を比較し、両データが最も一致したとき(相関が最も高くなるとき)の両データ間の位置ずれを検出する手法が考えられる。また、所定の基準画像及び対象画像から共通する特徴点を抽出し、抽出された特徴点の位置ずれを検出する手法が考えられる。
また、2つの画像間の位置ずれを求めるための関数として、位相限定相関関数を用いるようにしてもよい。この場合、まず、各画像をフーリエ変換し、各周波数成分の位相と振幅を得る。なお、得られた振幅成分は、各周波数成分に関して大きさ1に正規化しておく。次に、2つの画像間で周波数毎の位相差を算出した後、これらに逆フーリエ変換をかける。
ここで、2つの画像間の位置ずれがなければ、余弦波のみの加算となり、原点位置(0,0)にピークが出現する。また、位置ずれがある場合、位置ずれに対応する位置にピークが出る。そこで、ピークの検出位置を求めることにより2つの画像間の位置ずれが得られる。この手法によれば、正面画像の位置ずれを高精度かつ短時間で検出できる。