JP6003226B2 - 車両周囲画像表示制御装置および車両周囲画像表示制御プログラム - Google Patents
車両周囲画像表示制御装置および車両周囲画像表示制御プログラム Download PDFInfo
- Publication number
- JP6003226B2 JP6003226B2 JP2012117762A JP2012117762A JP6003226B2 JP 6003226 B2 JP6003226 B2 JP 6003226B2 JP 2012117762 A JP2012117762 A JP 2012117762A JP 2012117762 A JP2012117762 A JP 2012117762A JP 6003226 B2 JP6003226 B2 JP 6003226B2
- Authority
- JP
- Japan
- Prior art keywords
- bird
- image
- vehicle
- history
- area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 claims description 356
- 240000004050 Pentaglottis sempervirens Species 0.000 claims description 348
- 238000006243 chemical reaction Methods 0.000 claims description 23
- 230000006870 function Effects 0.000 claims description 20
- 230000006399 behavior Effects 0.000 claims description 6
- 238000010276 construction Methods 0.000 claims description 3
- 238000000034 method Methods 0.000 description 27
- 230000015572 biosynthetic process Effects 0.000 description 10
- 238000003786 synthesis reaction Methods 0.000 description 10
- 241000905137 Veronica schmidtiana Species 0.000 description 6
- 239000002131 composite material Substances 0.000 description 4
- 239000000203 mixture Substances 0.000 description 4
- 206010034719 Personality change Diseases 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000002194 synthesizing effect Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 1
Images





















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/90—Dynamic range modification of images or parts thereof
- G06T5/94—Dynamic range modification of images or parts thereof based on local image properties, e.g. for local contrast enhancement
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/04—Context-preserving transformations, e.g. by using an importance map
- G06T3/047—Fisheye or wide-angle transformations
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/168—Driving aids for parking, e.g. acoustic or visual feedback on parking space
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30264—Parking
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2215/00—Indexing scheme for image rendering
- G06T2215/12—Shadow map, environment map
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Closed-Circuit Television Systems (AREA)
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Controls And Circuits For Display Device (AREA)
Description
例えば、カメラが車両の後方を撮影するリアカメラである場合、図5に示すように、車両の後方を除く周囲の鳥瞰画像を保存するための履歴領域91と、車両の後方の鳥瞰画像を保存するためのリアルタイム領域92とをメモリ上に設ける。そして、最新の撮影画像の鳥瞰画像をメモリ上のリアルタイム領域92に上書きし、履歴領域91およびリアルタイム領域92の合成鳥瞰画像を画像表示装置に表示させ、車両情報(ステアリング角、車速等)を利用して車両の動きを計算し、計算した車両の動きと逆の動きをするよう、履歴領域91およびリアルタイム領域92において画像を移動させる。
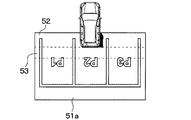
また、請求項6に記載の発明は、車両に搭載された車載カメラ(1)から前記車両の周囲の撮影画像を繰り返し取得する取得装置(110)と、撮影画像に鳥瞰変換を逐次施して、鳥瞰画像を作成する鳥瞰変換装置(115)と、前記車両から入力された車両挙動情報に基づいて、前記車両の動き量を算出する動き算出装置(135、155)と、前記車両の周囲の所定のB範囲のB鳥瞰画像を記憶するリアルB領域と、前記B範囲よりも前記車両からより離れた所定のA範囲のA鳥瞰画像を記憶するリアルA領域と、前記リアルA領域が記憶していた前記A鳥瞰画像を前記動き算出装置が算出した前記車両の動き量に基づいて前記車両との相対位置を移動させて履歴B鳥瞰画像として記憶する履歴B領域と、前記履歴B領域が記憶していた前記履歴B鳥瞰画像または前記リアルB領域が記憶していた前記B鳥瞰画像を、前記動き算出装置が算出した前記車両の動き量に基づいて前記車両との相対位置を移動させてC鳥瞰画像として記憶する履歴C領域と、を有するメモリと、前記鳥瞰画像を前記車両の前後方向に分割することで、前記A鳥瞰画像と前記B鳥瞰画像を作成し、前記A鳥瞰画像を前記リアルA領域(51a)に保存し、前記B鳥瞰画像を前記リアルB領域(51b)に保存する分割保存装置(120)と、前記リアルB領域(51b)の一部または全部に保存されたB鳥瞰画像に影があるか否かを判定する影判定装置(125)と、前記影判定装置(125)が、B鳥瞰画像に影がないと判定した場合、前記リアルB領域(51b)に保存されていたB鳥瞰画像を用いて前記履歴C領域(52)内に前記C鳥瞰画像を構成する第1履歴画像構成装置(140)と、前記影判定装置(125)が、B鳥瞰画像に影があると判定した場合、前記履歴B領域(53)内に保存されていた履歴B鳥瞰画像を用いて前記履歴C領域(52)内に前記C鳥瞰画像を構成する第2履歴画像構成装置(160)と、前記リアルA領域(51a)内の前記A鳥瞰画像、前記履歴C領域(52)内の前記C鳥瞰画像、および、前記リアルB領域(51b)内の前記B鳥瞰画像または前記履歴B領域(53)内の前記履歴B鳥瞰画像を、画像表示装置(3)に表示させる表示制御装置(130、150)と、を備えた車両周囲画像表示制御装置である。
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含するものである。例えば、以下のような形態も許容される。
2 制御装置(車両周囲画像表示制御装置)
3 画像表示装置
51a リアルA領域
51b リアルB領域
52 履歴C領域
53 履歴B領域
Claims (6)
- 車両に搭載された車載カメラ(1)から前記車両の周囲の撮影画像を繰り返し取得する取得手段(110)と、
前記取得手段(110)が繰り返し取得した撮影画像に鳥瞰変換を逐次施して鳥瞰画像を作成する鳥瞰変換手段(115)と、
作成された最新の前記鳥瞰画像をメモリに保存する際、前記鳥瞰画像を前記車両の前後方向に分割したうちの、前記車両からより離れた方の所定の範囲の画像を、リアルA領域(51a)に保存し、前記車両により近い方の所定の範囲の画像を、リアルB領域(51b)に保存する分割保存手段(120)と、
前記リアルB領域(51b)の一部または全部を含む所定の領域に保存された鳥瞰画像内に影があるか否かを判定する影判定手段(125)と、
前記車両から入力された車両挙動情報に基づいて、前記車両の動き量を算出する動き算出手段(135、155)と、
前記影判定手段(125)によって影がないと判定された場合、前記車載カメラ(1)の撮影範囲外の鳥瞰画像を保存するための履歴C領域(52)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記リアルB領域(51b)内に保存された鳥瞰画像を用いて前記履歴C領域(52)内に鳥瞰画像を構成すると共に、前記リアルB領域(51b)と同じ範囲の鳥瞰画像を保存するための履歴B領域(53)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記リアルA領域(51a)内に保存された鳥瞰画像を用いて前記履歴B領域(53)内に鳥瞰画像を構成する第1履歴画像構成手段(140)と、
前記影判定手段(125)によって影があると判定された場合、前記車載カメラ(1)の撮影範囲外の鳥瞰画像を保存するための履歴C領域(52)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記履歴B領域(53)内に保存された鳥瞰画像を用いて前記履歴C領域(52)内に鳥瞰画像を構成すると共に、前記履歴B領域(53)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記リアルA領域(51a)内に保存された鳥瞰画像を用いて前記履歴B領域(53)内に鳥瞰画像を構成する第2履歴画像構成手段(160)と、
前記リアルA領域(51a)内の鳥瞰画像、前記履歴C領域(52)内の鳥瞰画像、および、前記リアルB領域(51b)内または前記履歴B領域(53)内の鳥瞰画像を、画像表示装置(3)に表示させる表示制御手段(130、150)と、を備えた車両周囲画像表示制御装置。 - 前記表示制御手段は、
前記影判定手段(125)によって影がないと判定されたことに基づいて、前記リアルA領域(51a)内の鳥瞰画像、前記リアルB領域(51b)内の鳥瞰画像、および前記履歴C領域(52)内の鳥瞰画像を、前記画像表示装置(3)に表示させる第1表示制御手段(130)と、
前記影判定手段(125)によって影があると判定されたことに基づいて、前記リアルA領域(51a)内の鳥瞰画像、前記履歴B領域(53)内の鳥瞰画像、および前記履歴C領域(52)内の鳥瞰画像を、前記画像表示装置(3)に表示させる第2表示制御手段(150)と、を有することを特徴とする請求項1に記載の車両周囲画像表示制御装置。 - 前記履歴B領域(53)中に鳥瞰画像のデータが所定量以上あるか否か判定するデータ量判定手段(145)を備え、
前記第1履歴画像構成手段(140)は、前記影判定手段(125)によって影がないと判定された場合、および、前記影判定手段(125)によって影があると判定され且つ前記データ量判定手段(145)によって所定量以上ないと判定された場合のそれぞれにおいて、前記履歴C領域(52)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記リアルB領域(51b)内に保存された鳥瞰画像を用いて前記履歴C領域(52)内に鳥瞰画像を構成すると共に、前記履歴B領域(53)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記リアルA領域(51a)内に保存された鳥瞰画像を用いて前記履歴B領域(53)内に鳥瞰画像を構成し、
前記第2履歴画像構成手段(160)は、前記影判定手段(125)によって影があると判定され且つ前記データ量判定手段(145)によって所定量以上あると判定された場合、前記履歴C領域(52)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記履歴B領域(53)内に保存された鳥瞰画像を用いて前記履歴C領域(52)内に鳥瞰画像を構成すると共に、前記履歴B領域(53)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記リアルA領域(51a)内に保存された鳥瞰画像を用いて前記履歴B領域(53)内に鳥瞰画像を構成することを特徴とする請求項1または2に記載の車両周囲画像表示制御装置。 - 第1履歴画像構成手段(140)は、前記影判定手段(125)によって影がないと判定されたことに基づいて、前記車両の前記動き量に基づいて、前記リアルA領域(51a)、前記リアルB領域(51b)、および前記履歴C領域(52c)を繋ぎ合わせた結合領域内で鳥瞰画像を移動させ、それと共に、前記リアルB領域(51b)と同じ範囲の鳥瞰画像を保存するための履歴B領域(53)および前記リアルA領域(51a)を繋ぎ合わせた結合領域内で鳥瞰画像を移動させ、
第1履歴画像構成手段(160)は、前記影判定手段(125)によって影があると判定されたことに基づいて、前記車両の前記動き量に基づいて、前記リアルA領域(51a)、前記履歴B領域(53)、および前記履歴C領域(52c)を繋ぎ合わせた結合領域内で鳥瞰画像を移動させる第2移動手段(160)と、を備えた請求項1ないし3のいずれか1つに車両周囲画像表示制御装置。 - 車両に搭載された車載カメラ(1)から前記車両の周囲の撮影画像を繰り返し取得する取得手段(110)と、
前記取得手段(110)が繰り返し取得した撮影画像に鳥瞰変換を逐次施して鳥瞰画像を作成する鳥瞰変換手段(115)と、
作成された最新の前記鳥瞰画像をメモリに保存する際、前記鳥瞰画像を前記車両の前後方向に分割したうちの、前記車両からより離れた方の所定の範囲の画像を、リアルA領域(51a)に保存し、前記車両により近い方の所定の範囲の画像を、リアルB領域(51b)に保存する分割保存手段(120)と、
前記リアルB領域(51b)の一部または全部を含む所定の領域に保存された鳥瞰画像内に影があるか否かを判定する影判定手段(125)と、
前記車両から入力された車両挙動情報に基づいて、前記車両の動き量を算出する動き算出手段(135、155)と、
前記影判定手段(125)によって影がないと判定された場合、前記車載カメラ(1)の撮影範囲外の鳥瞰画像を保存するための履歴C領域(52)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記リアルB領域(51b)内に保存された鳥瞰画像を用いて前記履歴C領域(52)内に鳥瞰画像を構成すると共に、前記リアルB領域(51b)と同じ範囲の鳥瞰画像を保存するための履歴B領域(53)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記リアルA領域(51a)内に保存された鳥瞰画像を用いて前記履歴B領域(53)内に鳥瞰画像を構成する第1履歴画像構成手段(140)と、
前記影判定手段(125)によって影があると判定された場合、前記車載カメラ(1)の撮影範囲外の鳥瞰画像を保存するための履歴C領域(52)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記履歴B領域(53)内に保存された鳥瞰画像を用いて前記履歴C領域(52)内に鳥瞰画像を構成すると共に、前記履歴B領域(53)内の鳥瞰画像が前記車両の現在の周囲の配置を反映するよう、前記車両の前記動き量に基づいて、前記リアルA領域(51a)内に保存された鳥瞰画像を用いて前記履歴B領域(53)内に鳥瞰画像を構成する第2履歴画像構成手段(160)と、
前記リアルA領域(51a)内の鳥瞰画像、前記履歴C領域(52)内の鳥瞰画像、および、前記リアルB領域(51b)内または前記履歴B領域(53)内の鳥瞰画像を、画像表示装置(3)に表示させる表示制御手段(130、150)と、として、前記車両に搭載される制御装置(2)を機能させるプログラム。 - 車両に搭載された車載カメラ(1)から前記車両の周囲の撮影画像を繰り返し取得する取得装置(110)と、
撮影画像に鳥瞰変換を逐次施して、鳥瞰画像を作成する鳥瞰変換装置(115)と、
前記車両から入力された車両挙動情報に基づいて、前記車両の動き量を算出する動き算出装置(135、155)と、
前記車両の周囲の所定のB範囲のB鳥瞰画像を記憶するリアルB領域と、前記B範囲よりも前記車両からより離れた所定のA範囲のA鳥瞰画像を記憶するリアルA領域と、前記リアルA領域が記憶していた前記A鳥瞰画像を前記動き算出装置が算出した前記車両の動き量に基づいて前記車両との相対位置を移動させて履歴B鳥瞰画像として記憶する履歴B領域と、前記履歴B領域が記憶していた前記履歴B鳥瞰画像または前記リアルB領域が記憶していた前記B鳥瞰画像を、前記動き算出装置が算出した前記車両の動き量に基づいて前記車両との相対位置を移動させてC鳥瞰画像として記憶する履歴C領域と、を有するメモリと、
前記鳥瞰画像を前記車両の前後方向に分割することで、前記A鳥瞰画像と前記B鳥瞰画像を作成し、前記A鳥瞰画像を前記リアルA領域(51a)に保存し、前記B鳥瞰画像を前記リアルB領域(51b)に保存する分割保存装置(120)と、
前記リアルB領域(51b)の一部または全部に保存されたB鳥瞰画像に影があるか否かを判定する影判定装置(125)と、
前記影判定装置(125)が、B鳥瞰画像に影がないと判定した場合、前記リアルB領域(51b)に保存されていたB鳥瞰画像を用いて前記履歴C領域(52)内に前記C鳥瞰画像を構成する第1履歴画像構成装置(140)と、
前記影判定装置(125)が、B鳥瞰画像に影があると判定した場合、前記履歴B領域(53)内に保存されていた履歴B鳥瞰画像を用いて前記履歴C領域(52)内に前記C鳥瞰画像を構成する第2履歴画像構成装置(160)と、
前記リアルA領域(51a)内の前記A鳥瞰画像、前記履歴C領域(52)内の前記C鳥瞰画像、および、前記リアルB領域(51b)内の前記B鳥瞰画像または前記履歴B領域(53)内の前記履歴B鳥瞰画像を、画像表示装置(3)に表示させる表示制御装置(130、150)と、を備えた車両周囲画像表示制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012117762A JP6003226B2 (ja) | 2012-05-23 | 2012-05-23 | 車両周囲画像表示制御装置および車両周囲画像表示制御プログラム |
| US14/395,514 US20150070394A1 (en) | 2012-05-23 | 2013-03-08 | Vehicle surrounding image display control device, vehicle surrounding image display control method, non-transitory tangible computer-readable medium comprising command including the method, and image processing method executing top view conversion and display of image of vehicle surroundings |
| CN201380026870.XA CN104335241B (zh) | 2012-05-23 | 2013-03-08 | 车辆周围图像显示控制装置、显示方法及图像处理方法 |
| PCT/JP2013/001489 WO2013175684A1 (ja) | 2012-05-23 | 2013-03-08 | 車両周囲画像表示制御装置、車両周囲画像表示制御方法、当該方法を含む命令からなる持続的有形コンピュータ読み取り媒体、車両の周囲の画像をトップビュー変換して表示させる画像処理方法 |
| EP13793824.7A EP2854098B1 (en) | 2012-05-23 | 2013-03-08 | Vehicle surroundings image display control device, vehicle surroundings image display control method, non-transitory tangible computer-read medium comprising command containing said method, and image processing method effecting top-view conversion and display of image of vehicle surroundings |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012117762A JP6003226B2 (ja) | 2012-05-23 | 2012-05-23 | 車両周囲画像表示制御装置および車両周囲画像表示制御プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013246493A JP2013246493A (ja) | 2013-12-09 |
| JP2013246493A5 JP2013246493A5 (ja) | 2014-09-18 |
| JP6003226B2 true JP6003226B2 (ja) | 2016-10-05 |
Family
ID=49623400
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012117762A Active JP6003226B2 (ja) | 2012-05-23 | 2012-05-23 | 車両周囲画像表示制御装置および車両周囲画像表示制御プログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20150070394A1 (ja) |
| EP (1) | EP2854098B1 (ja) |
| JP (1) | JP6003226B2 (ja) |
| CN (1) | CN104335241B (ja) |
| WO (1) | WO2013175684A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190114283A (ko) * | 2018-03-29 | 2019-10-10 | 주식회사평화발레오 | 펄크럼 링 센터링 기능을 구비한 클러치 어셈블리 |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5994437B2 (ja) * | 2012-07-04 | 2016-09-21 | 株式会社デンソー | 車両周囲画像表示制御装置および車両周囲画像表示制御プログラム |
| JP6327115B2 (ja) * | 2014-11-04 | 2018-05-23 | 株式会社デンソー | 車両周辺画像表示装置、車両周辺画像表示方法 |
| KR102426631B1 (ko) * | 2015-03-16 | 2022-07-28 | 현대두산인프라코어 주식회사 | 건설 기계의 사각 영역 표시 방법 및 이를 수행하기 위한 장치 |
| JP6464846B2 (ja) | 2015-03-17 | 2019-02-06 | 株式会社デンソー | 車両周囲画像表示制御装置、および車両周囲画像表示制御プログラム |
| JP6464952B2 (ja) | 2015-08-04 | 2019-02-06 | 株式会社デンソー | 表示制御装置、表示制御プログラム及び表示制御方法 |
| JP6910629B2 (ja) * | 2015-08-12 | 2021-07-28 | 有限会社ヴェルク・ジャパン | 歴史画像と現在画像の合成及び音声ガイドの表現方法。 |
| JP6519409B2 (ja) * | 2015-08-27 | 2019-05-29 | 株式会社デンソー | 車両周辺画像表示制御装置及び車両周辺画像表示制御プログラム |
| JP6493143B2 (ja) * | 2015-10-15 | 2019-04-03 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP6477444B2 (ja) | 2015-11-25 | 2019-03-06 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP2017117315A (ja) * | 2015-12-25 | 2017-06-29 | 株式会社デンソー | 表示制御装置 |
| JP6565693B2 (ja) * | 2016-01-12 | 2019-08-28 | 株式会社デンソー | 車載カメラのレンズ異常検出装置 |
| CN105774657B (zh) * | 2016-04-14 | 2020-03-17 | 广州市晶华精密光学股份有限公司 | 一种单摄像头全景倒车影像系统 |
| CN105763854B (zh) * | 2016-04-18 | 2019-01-08 | 扬州航盛科技有限公司 | 一种基于单目摄像头的全景成像系统及其成像方法 |
| JP6572862B2 (ja) * | 2016-10-14 | 2019-09-11 | 株式会社デンソー | 表示制御装置 |
| US10325163B2 (en) * | 2016-11-22 | 2019-06-18 | Ford Global Technologies, Llc | Vehicle vision |
| JP6720931B2 (ja) * | 2017-07-14 | 2020-07-08 | 株式会社デンソー | 車両周囲認識装置 |
| US10579067B2 (en) * | 2017-07-20 | 2020-03-03 | Huawei Technologies Co., Ltd. | Method and system for vehicle localization |
| GB2573792B (en) * | 2018-05-17 | 2022-11-09 | Denso Corp | Surround monitoring system for vehicles |
| IL265818A (en) * | 2019-04-02 | 2020-10-28 | Ception Tech Ltd | System and method for determining the position and orientation of an object in space |
| DE102021212154A1 (de) | 2021-10-27 | 2023-04-27 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Generieren einer Darstellung eines verdeckten Bereiches einer Umgebung einer mobilen Plattform |
| DE102022206328B3 (de) | 2022-04-19 | 2023-02-09 | Continental Autonomous Mobility Germany GmbH | Verfahren für ein Kamerasystem sowie Kamerasystem |
| WO2023202844A1 (de) | 2022-04-19 | 2023-10-26 | Continental Autonomous Mobility Germany GmbH | Verfahren für ein kamerasystem sowie kamerasystem |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6515597B1 (en) * | 2000-01-31 | 2003-02-04 | Matsushita Electric Industrial Co. Ltd. | Vicinity display for car |
| EP1150252B1 (en) * | 2000-04-28 | 2018-08-15 | Panasonic Intellectual Property Management Co., Ltd. | Synthesis of image from a plurality of camera views |
| JP3300337B2 (ja) * | 2000-04-28 | 2002-07-08 | 松下電器産業株式会社 | 画像処理装置および監視システム |
| JP4156214B2 (ja) | 2001-06-13 | 2008-09-24 | 株式会社デンソー | 車両周辺画像処理装置及び記録媒体 |
| JP4321543B2 (ja) * | 2006-04-12 | 2009-08-26 | トヨタ自動車株式会社 | 車両周辺監視装置 |
| JP2007300559A (ja) * | 2006-05-02 | 2007-11-15 | Alpine Electronics Inc | 車両周辺画像提供装置及び車両周辺画像における影補正方法 |
| JP4309920B2 (ja) * | 2007-01-29 | 2009-08-05 | 株式会社東芝 | 車載用ナビゲーション装置、路面標示識別プログラム及び路面標示識別方法 |
| JP4770755B2 (ja) * | 2007-02-26 | 2011-09-14 | 株式会社デンソー | 道路標示認識装置 |
| JP2008219063A (ja) * | 2007-02-28 | 2008-09-18 | Sanyo Electric Co Ltd | 車両周辺監視装置及び方法 |
| JP5206687B2 (ja) * | 2007-10-30 | 2013-06-12 | 日本電気株式会社 | 路面標示画像処理装置,路面標示画像処理方法及びプログラム |
| JP5222597B2 (ja) * | 2008-03-19 | 2013-06-26 | 三洋電機株式会社 | 画像処理装置及び方法、運転支援システム、車両 |
| JP2010237976A (ja) | 2009-03-31 | 2010-10-21 | Kyushu Institute Of Technology | 光源情報取得装置、陰影検出装置、陰影除去装置、それらの方法、及びプログラム |
| JP5872764B2 (ja) * | 2010-12-06 | 2016-03-01 | 富士通テン株式会社 | 画像表示システム |
-
2012
- 2012-05-23 JP JP2012117762A patent/JP6003226B2/ja active Active
-
2013
- 2013-03-08 WO PCT/JP2013/001489 patent/WO2013175684A1/ja active Application Filing
- 2013-03-08 CN CN201380026870.XA patent/CN104335241B/zh not_active Expired - Fee Related
- 2013-03-08 EP EP13793824.7A patent/EP2854098B1/en not_active Not-in-force
- 2013-03-08 US US14/395,514 patent/US20150070394A1/en not_active Abandoned
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190114283A (ko) * | 2018-03-29 | 2019-10-10 | 주식회사평화발레오 | 펄크럼 링 센터링 기능을 구비한 클러치 어셈블리 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2854098A1 (en) | 2015-04-01 |
| CN104335241A (zh) | 2015-02-04 |
| CN104335241B (zh) | 2017-04-12 |
| EP2854098A4 (en) | 2016-03-09 |
| WO2013175684A1 (ja) | 2013-11-28 |
| EP2854098B1 (en) | 2018-09-19 |
| JP2013246493A (ja) | 2013-12-09 |
| US20150070394A1 (en) | 2015-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6003226B2 (ja) | 車両周囲画像表示制御装置および車両周囲画像表示制御プログラム | |
| JP5994437B2 (ja) | 車両周囲画像表示制御装置および車両周囲画像表示制御プログラム | |
| US9633266B2 (en) | Image processing apparatus and method that synthesizes an all-round image of a vehicle's surroundings | |
| JP5299296B2 (ja) | 車両周辺画像表示装置及び車両周辺画像表示方法 | |
| JP2007274377A (ja) | 周辺監視装置、プログラム | |
| JP2013246493A5 (ja) | ||
| CN109572686A (zh) | 泊车辅助装置 | |
| JP5790335B2 (ja) | 車両周辺画像表示制御装置 | |
| JP6477444B2 (ja) | 表示制御装置及び表示制御プログラム | |
| CN107077715B (zh) | 车辆周边图像显示装置、车辆周边图像显示方法 | |
| US10873725B2 (en) | Display control device | |
| CN108431866B (zh) | 显示控制装置以及显示控制方法 | |
| JP4814752B2 (ja) | 表示制御装置 | |
| JP6519409B2 (ja) | 車両周辺画像表示制御装置及び車両周辺画像表示制御プログラム | |
| KR102659382B1 (ko) | 차량 주변환경을 표시하기 위한 방법 및 장치 | |
| JP7203205B2 (ja) | 車両周辺画像生成装置、車両周辺表示システム、及び車両周辺表示方法 | |
| JP6464846B2 (ja) | 車両周囲画像表示制御装置、および車両周囲画像表示制御プログラム | |
| JP4846627B2 (ja) | 表示制御装置 | |
| JP6700222B2 (ja) | 画像作成装置 | |
| JP6809495B2 (ja) | 画像作成装置 | |
| WO2017022457A1 (ja) | 表示制御装置、表示制御方法、及び表示制御プログラム | |
| CN108353147B (zh) | 显示控制装置以及储存有显示控制程序的非暂时性计算机可读存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140801 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160809 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160822 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6003226 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |