JP5977828B2 - 光ビームアラインメントのためのエネルギセンサ - Google Patents
光ビームアラインメントのためのエネルギセンサ Download PDFInfo
- Publication number
- JP5977828B2 JP5977828B2 JP2014527148A JP2014527148A JP5977828B2 JP 5977828 B2 JP5977828 B2 JP 5977828B2 JP 2014527148 A JP2014527148 A JP 2014527148A JP 2014527148 A JP2014527148 A JP 2014527148A JP 5977828 B2 JP5977828 B2 JP 5977828B2
- Authority
- JP
- Japan
- Prior art keywords
- target
- light beam
- amplified light
- sensors
- energy
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70008—Production of exposure light, i.e. light sources
- G03F7/70033—Production of exposure light, i.e. light sources by plasma extreme ultraviolet [EUV] sources
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05G—X-RAY TECHNIQUE
- H05G2/00—Apparatus or processes specially adapted for producing X-rays, not involving X-ray tubes, e.g. involving generation of a plasma
- H05G2/001—X-ray radiation generated from plasma
- H05G2/003—X-ray radiation generated from plasma being produced from a liquid or gas
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05G—X-RAY TECHNIQUE
- H05G2/00—Apparatus or processes specially adapted for producing X-rays, not involving X-ray tubes, e.g. involving generation of a plasma
- H05G2/001—X-ray radiation generated from plasma
- H05G2/008—X-ray radiation generated from plasma involving a beam of energy, e.g. laser or electron beam in the process of exciting the plasma
Landscapes
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Plasma & Fusion (AREA)
- General Physics & Mathematics (AREA)
- X-Ray Techniques (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Lasers (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Description
本出願は、2011年8月19日出願の「光ビームアラインメントのためのエネルギセンサ」という名称の米国特許仮出願番号第61/525,561号に対する優先権を主張し、かつ2011年9月30日出願の「光ビームアラインメントのためのエネルギセンサ」という名称の米国一般特許出願番号第13/249,504号に対する優先権を主張するものであり、これらの特許の両方は、これにより引用によって本明細書にその全体が組み込まれる。
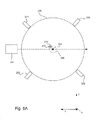
205 ターゲット領域
210 光ビーム
235 コレクターミラー
240 開口
Claims (11)
- 駆動軸線に沿って進むパルスの増幅光ビームを生成する駆動レーザシステムと、
前記パルスの増幅光ビームをターゲット領域に向けて誘導するビーム送出システムと、
ターゲット材料を含むターゲット混合物を前記ターゲット領域に供給するターゲット材料送出システムと、
前記ターゲット領域と交差する主軸線から異なる位置で半径方向に分離される2以上のセンサであって、前記パルスの増幅光ビームが前記ターゲット混合物と交差した時にプラズマ状態の前記ターゲット材料から放出された紫外電磁放射線のエネルギを検出する2以上のセンサと、
前記2以上のセンサからの出力を受け取り、検出した前記エネルギを用いた計算に基づいて前記ターゲット混合物と前記ターゲット領域内の前記駆動軸線との間の相対的半径方向アラインメントを推定し、かつ前記ターゲット領域における前記ターゲット混合物に対する前記増幅光ビームの半径方向アラインメントを調節し、それによって前記ターゲット混合物と前記ターゲット領域内の前記駆動軸線との間の相対的半径方向距離を調節する信号を前記ビーム送出システムに出力するコントローラと、を備え、
前記ターゲット混合物に対する前記増幅光ビームの半径方向アラインメントを調節することは、前記ビーム送出システム内の一つ又はそれよりも多くの要素の位置を調整することを含む、装置。 - 前記駆動レーザシステムは、望ましい波長を高い利得で光学的に増幅することができる利得媒体と、励起源と、内部光学系と、を各々が含む1以上の光増幅器を含む、請求項1に記載の装置。
- 前記利得媒体は、CO2を含む、請求項2に記載の装置。
- 前記ビーム送出システムは、前記増幅光ビームを前記ターゲット領域に集束させる集束光学要素を含む、請求項1に記載の装置。
- 前記ターゲット材料送出システムは、前記ターゲット領域に前記ターゲット混合物の流体液滴を供給するノズルを含む、請求項1に記載の装置。
- 前記パルスの増幅光ビームが前記ターゲット混合物と交差した時に前記プラズマ状態の前記ターゲット材料から放出された前記紫外電磁放射線の少なくとも一部分を捕捉して向け直す放射線コレクタを更に備える、請求項1に記載の装置。
- 放出された前記紫外電磁放射線は、極紫外電磁放射線を含む、請求項1に記載の装置。
- 前記2以上のセンサは、前記主軸線から半径方向に分離された少なくとも4つのセンサを含む、請求項1に記載の装置。
- 前記2以上のセンサのうちの少なくとも1つが、他のセンサのうちの少なくとも1つを半径方向に分離する距離とは異なる距離によって前記主軸線から半径方向に分離される、請求項1に記載の装置。
- 前記ターゲット混合物から前記駆動レーザシステムに向けて反射して戻されたレーザビームの光学像を捕捉する撮像デバイスを更に備え、
前記コントローラはまた、前記撮像デバイスからの出力を受け取り、かつ前記撮像デバイスから受け取った前記出力にも基づいて前記相対的半径方向アラインメントを推定する、請求項1に記載の装置。 - 前記2以上のセンサのサンプリング速度が、前記駆動レーザシステムのパルス繰返し速度の程度である、請求項1に記載の装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161525561P | 2011-08-19 | 2011-08-19 | |
| US61/525,561 | 2011-08-19 | ||
| US13/249,504 US8993976B2 (en) | 2011-08-19 | 2011-09-30 | Energy sensors for light beam alignment |
| US13/249,504 | 2011-09-30 | ||
| PCT/US2012/046093 WO2013028272A1 (en) | 2011-08-19 | 2012-07-10 | Energy sensors for light beam alignment |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014531743A JP2014531743A (ja) | 2014-11-27 |
| JP2014531743A5 JP2014531743A5 (ja) | 2015-08-13 |
| JP5977828B2 true JP5977828B2 (ja) | 2016-08-24 |
Family
ID=47711970
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014527148A Active JP5977828B2 (ja) | 2011-08-19 | 2012-07-10 | 光ビームアラインメントのためのエネルギセンサ |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8993976B2 (ja) |
| EP (1) | EP2745650A4 (ja) |
| JP (1) | JP5977828B2 (ja) |
| KR (1) | KR101949839B1 (ja) |
| CN (1) | CN103748967B (ja) |
| TW (1) | TWI536869B (ja) |
| WO (1) | WO2013028272A1 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9148941B2 (en) * | 2013-01-22 | 2015-09-29 | Asml Netherlands B.V. | Thermal monitor for an extreme ultraviolet light source |
| US9000405B2 (en) * | 2013-03-15 | 2015-04-07 | Asml Netherlands B.V. | Beam position control for an extreme ultraviolet light source |
| US9558858B2 (en) * | 2013-08-14 | 2017-01-31 | Kla-Tencor Corporation | System and method for imaging a sample with a laser sustained plasma illumination output |
| JP6220879B2 (ja) | 2013-08-27 | 2017-10-25 | ギガフォトン株式会社 | 極端紫外光生成装置及び極端紫外光生成システム |
| US9271381B2 (en) * | 2014-02-10 | 2016-02-23 | Asml Netherlands B.V. | Methods and apparatus for laser produced plasma EUV light source |
| WO2015172816A1 (de) * | 2014-05-13 | 2015-11-19 | Trumpf Laser- Und Systemtechnik Gmbh | Einrichtung zur überwachung der ausrichtung eines laserstrahls und euv-strahlungserzeugungsvorrichtung damit |
| WO2016139022A1 (en) * | 2015-03-03 | 2016-09-09 | Asml Netherlands B.V. | Radiation sensor apparatus |
| US9927292B2 (en) * | 2015-04-23 | 2018-03-27 | Asml Netherlands B.V. | Beam position sensor |
| WO2017056324A1 (ja) | 2015-10-02 | 2017-04-06 | ギガフォトン株式会社 | 極端紫外光生成システム |
| WO2017077584A1 (ja) | 2015-11-03 | 2017-05-11 | ギガフォトン株式会社 | 極端紫外光生成装置 |
| US9536631B1 (en) * | 2015-11-19 | 2017-01-03 | Asml Netherlands B.V. | Systems and methods to avoid instability conditions in a source plasma chamber |
| WO2017090167A1 (ja) * | 2015-11-26 | 2017-06-01 | ギガフォトン株式会社 | 極端紫外光生成装置 |
| WO2017130346A1 (ja) * | 2016-01-28 | 2017-08-03 | ギガフォトン株式会社 | 極端紫外光生成装置 |
| WO2017154111A1 (ja) * | 2016-03-08 | 2017-09-14 | ギガフォトン株式会社 | 極端紫外光生成装置 |
| WO2017163345A1 (ja) * | 2016-03-23 | 2017-09-28 | ギガフォトン株式会社 | 極端紫外光生成装置及び極端紫外光の重心位置の制御方法 |
| US9778022B1 (en) | 2016-09-14 | 2017-10-03 | Asml Netherlands B.V. | Determining moving properties of a target in an extreme ultraviolet light source |
| US10149375B2 (en) | 2016-09-14 | 2018-12-04 | Asml Netherlands B.V. | Target trajectory metrology in an extreme ultraviolet light source |
| JP6775606B2 (ja) * | 2017-01-12 | 2020-10-28 | ギガフォトン株式会社 | 極端紫外光生成システム |
| WO2018131146A1 (ja) * | 2017-01-13 | 2018-07-19 | ギガフォトン株式会社 | 極端紫外光生成システム |
| CN110462522B (zh) * | 2017-03-20 | 2021-10-08 | Asml荷兰有限公司 | 光刻系统、euv辐射源、光刻扫描设备和控制系统 |
| WO2018179068A1 (ja) * | 2017-03-27 | 2018-10-04 | ギガフォトン株式会社 | Euv光生成装置及びeuv光の重心位置の制御方法 |
| NL2021836A (en) | 2017-10-26 | 2019-05-01 | Asml Netherlands Bv | System for monitoring a plasma |
| CN111955058A (zh) * | 2018-04-03 | 2020-11-17 | Asml荷兰有限公司 | 光束的空间调制 |
| CN112771999A (zh) * | 2018-09-25 | 2021-05-07 | Asml荷兰有限公司 | 在euv光源中用于靶量测和改变的激光系统 |
| CN112930714A (zh) * | 2018-10-26 | 2021-06-08 | Asml荷兰有限公司 | 监测光发射 |
| TW202041103A (zh) | 2019-01-30 | 2020-11-01 | 荷蘭商Asml荷蘭公司 | 判定在極紫外光光源中之目標之移動性質 |
| CN112629654A (zh) * | 2020-12-11 | 2021-04-09 | 苏州瑞派宁科技有限公司 | 检测装置、激光等离子光源及其调节方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7598509B2 (en) | 2004-11-01 | 2009-10-06 | Cymer, Inc. | Laser produced plasma EUV light source |
| US7439530B2 (en) | 2005-06-29 | 2008-10-21 | Cymer, Inc. | LPP EUV light source drive laser system |
| DE10251435B3 (de) * | 2002-10-30 | 2004-05-27 | Xtreme Technologies Gmbh | Strahlungsquelle zur Erzeugung von extrem ultravioletter Strahlung |
| US7217941B2 (en) * | 2003-04-08 | 2007-05-15 | Cymer, Inc. | Systems and methods for deflecting plasma-generated ions to prevent the ions from reaching an internal component of an EUV light source |
| US7217940B2 (en) * | 2003-04-08 | 2007-05-15 | Cymer, Inc. | Collector for EUV light source |
| JP4917014B2 (ja) * | 2004-03-10 | 2012-04-18 | サイマー インコーポレイテッド | Euv光源 |
| US7164144B2 (en) | 2004-03-10 | 2007-01-16 | Cymer Inc. | EUV light source |
| JP4683231B2 (ja) * | 2004-06-24 | 2011-05-18 | 株式会社ニコン | Euv光源、euv露光装置、及び半導体デバイスの製造方法 |
| US8766212B2 (en) * | 2006-07-19 | 2014-07-01 | Asml Netherlands B.V. | Correction of spatial instability of an EUV source by laser beam steering |
| US7633070B2 (en) | 2006-12-18 | 2009-12-15 | Kla-Tencor Technologies Corporation | Substrate processing apparatus and method |
| NL1036803A (nl) * | 2008-09-09 | 2010-03-15 | Asml Netherlands Bv | Radiation system and lithographic apparatus. |
| JP5553833B2 (ja) * | 2008-09-11 | 2014-07-16 | エーエスエムエル ネザーランズ ビー.ブイ. | 放射源およびリソグラフィ装置 |
| US8138487B2 (en) | 2009-04-09 | 2012-03-20 | Cymer, Inc. | System, method and apparatus for droplet catcher for prevention of backsplash in a EUV generation chamber |
| JP5252586B2 (ja) * | 2009-04-15 | 2013-07-31 | ウシオ電機株式会社 | レーザー駆動光源 |
| JP5612579B2 (ja) | 2009-07-29 | 2014-10-22 | ギガフォトン株式会社 | 極端紫外光源装置、極端紫外光源装置の制御方法、およびそのプログラムを記録した記録媒体 |
| US8000212B2 (en) | 2009-12-15 | 2011-08-16 | Cymer, Inc. | Metrology for extreme ultraviolet light source |
| US8173985B2 (en) | 2009-12-15 | 2012-05-08 | Cymer, Inc. | Beam transport system for extreme ultraviolet light source |
-
2011
- 2011-09-30 US US13/249,504 patent/US8993976B2/en active Active
-
2012
- 2012-07-10 KR KR1020147007197A patent/KR101949839B1/ko active IP Right Grant
- 2012-07-10 CN CN201280040305.4A patent/CN103748967B/zh active Active
- 2012-07-10 WO PCT/US2012/046093 patent/WO2013028272A1/en active Application Filing
- 2012-07-10 EP EP12825084.2A patent/EP2745650A4/en not_active Withdrawn
- 2012-07-10 JP JP2014527148A patent/JP5977828B2/ja active Active
- 2012-08-01 TW TW101127771A patent/TWI536869B/zh active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2745650A1 (en) | 2014-06-25 |
| KR20140053347A (ko) | 2014-05-07 |
| US20130043401A1 (en) | 2013-02-21 |
| US8993976B2 (en) | 2015-03-31 |
| CN103748967A (zh) | 2014-04-23 |
| CN103748967B (zh) | 2017-03-22 |
| JP2014531743A (ja) | 2014-11-27 |
| TWI536869B (zh) | 2016-06-01 |
| EP2745650A4 (en) | 2015-05-13 |
| KR101949839B1 (ko) | 2019-02-19 |
| WO2013028272A1 (en) | 2013-02-28 |
| TW201311057A (zh) | 2013-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5977828B2 (ja) | 光ビームアラインメントのためのエネルギセンサ | |
| KR101885748B1 (ko) | 광원 초점의 정렬 | |
| US8324600B2 (en) | Apparatus and method for measuring and controlling target trajectory in chamber apparatus | |
| US8653491B2 (en) | System, method and apparatus for aligning and synchronizing target material for optimum extreme ultraviolet light output | |
| US9167679B2 (en) | Beam position control for an extreme ultraviolet light source | |
| JP2014531743A5 (ja) | ||
| US10314153B2 (en) | Target expansion rate control in an extreme ultraviolet light source | |
| US10681797B2 (en) | Target trajectory metrology in an extreme ultraviolet light source | |
| TWI739755B (zh) | 極紫外線光源中之目標擴張率控制 | |
| CN110431391B (zh) | 针对极紫外光源的量测系统 | |
| KR102214861B1 (ko) | 극자외 광원을 위한 빔 위치 제어 | |
| JP6799583B2 (ja) | 極端紫外光生成装置及び極端紫外光の重心位置の制御方法 | |
| WO2021239357A1 (en) | Alignment of extreme ultraviolet light source |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20150622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150625 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150625 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20150625 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150714 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20150918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151120 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160329 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20160502 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160713 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160722 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5977828 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |